
Towards Autonomous Driving: Review and Perspectives on Configuration and Control of Four-Wheel Independent Drive/Steering Electric Vehicles



Abstract
:1. Introduction
2. Chassis Configuration of 4WID-4WIS EV
2.1. Configuration Analysis of 4WID-4WIS EV
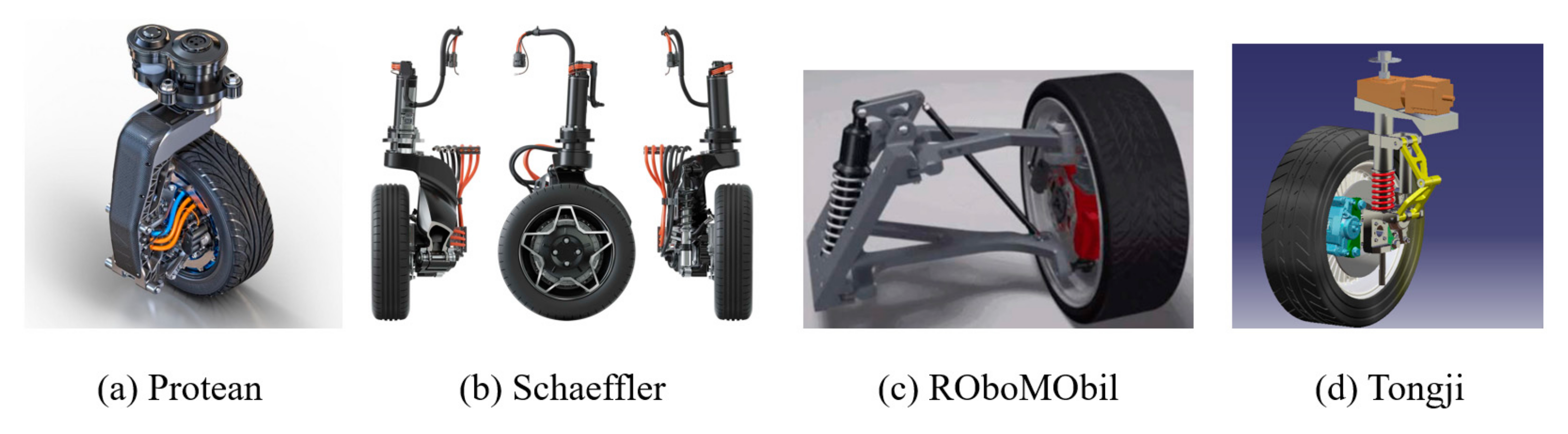
2.2. Prototypes of 4WID-4WIS EV
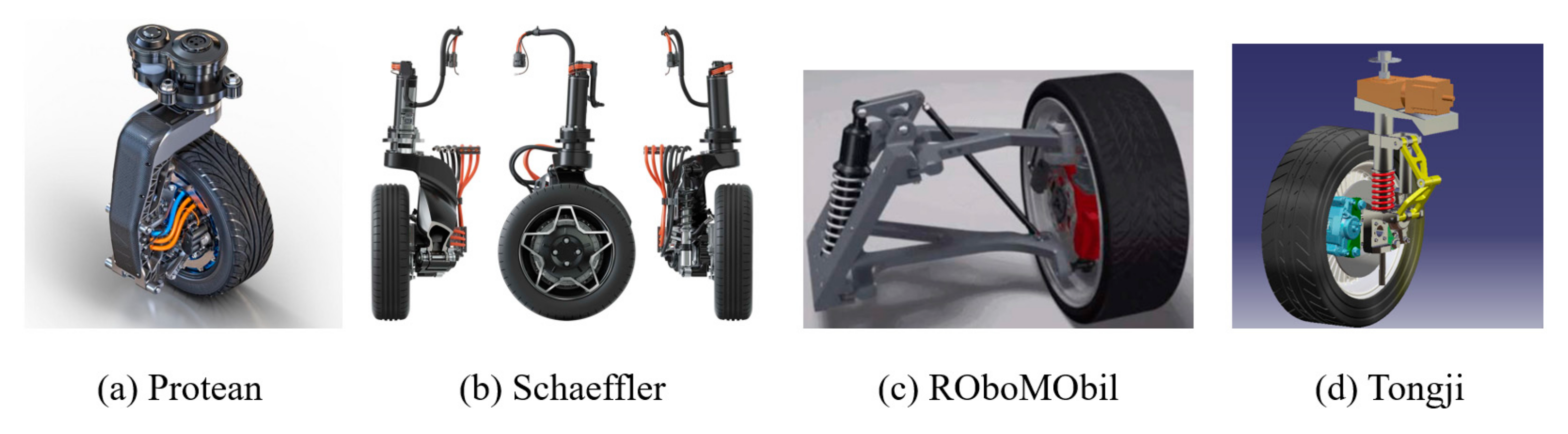
2.3. Integrated X-by-Wire Module of 4WID-4WIS EV
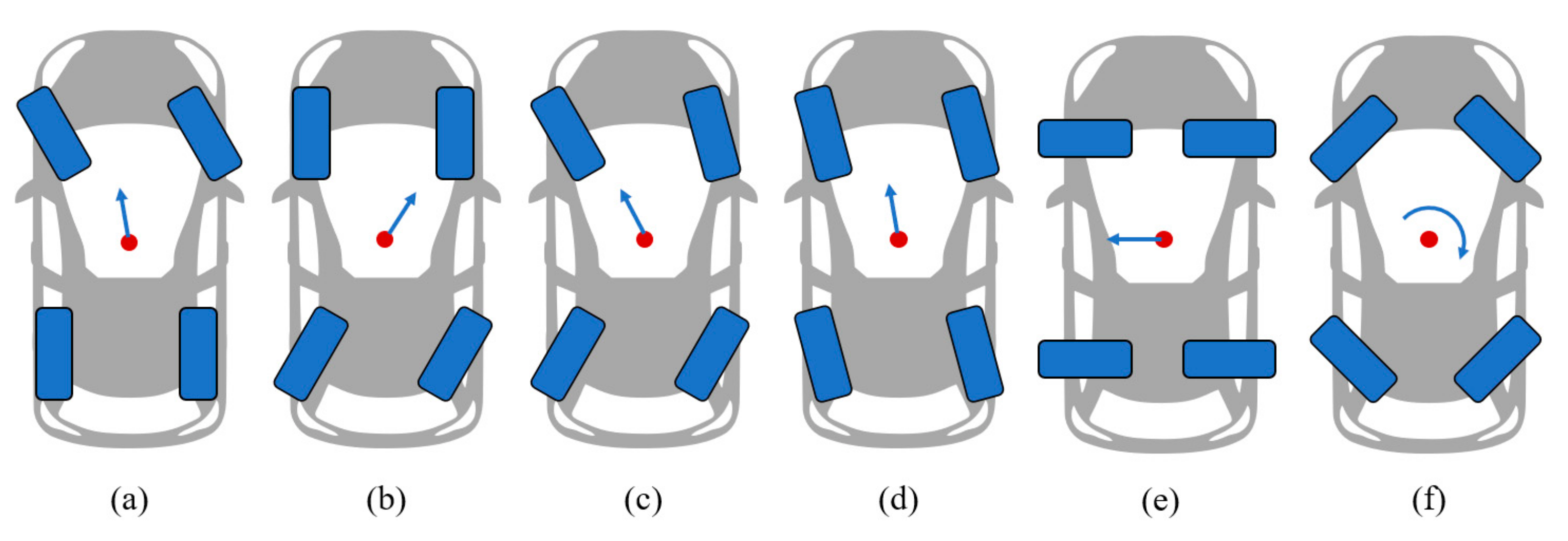
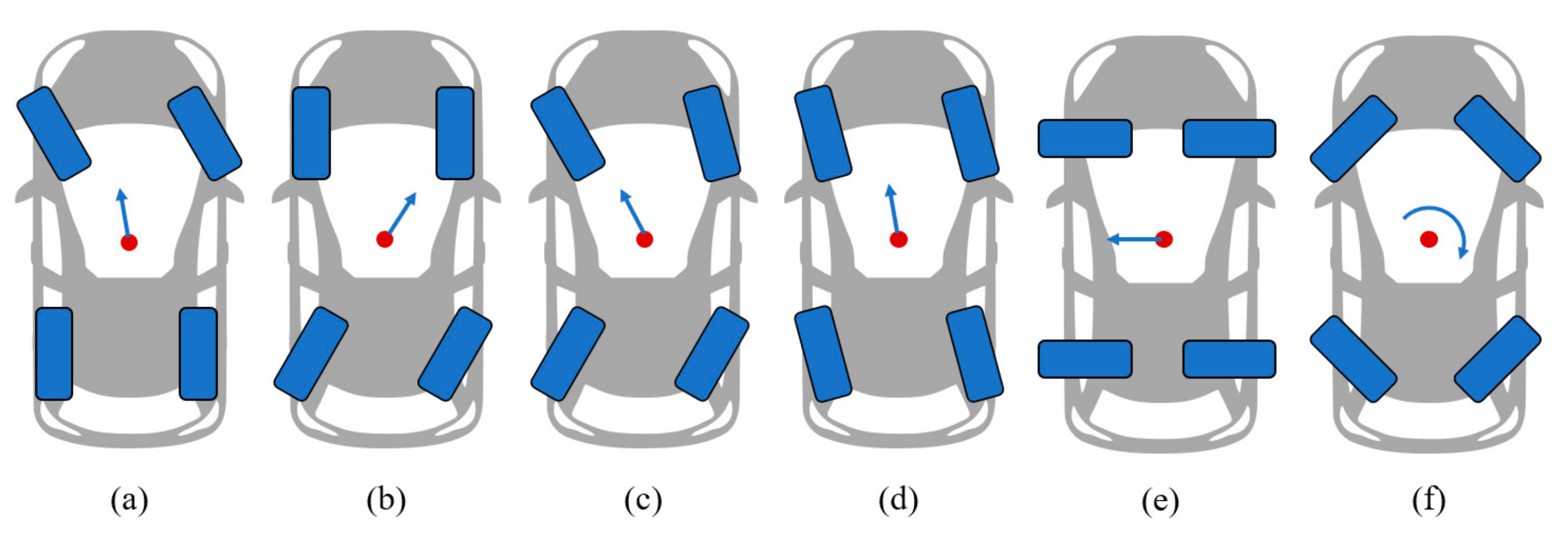
2.4. Steering Modes and Switching Logic
3. Control Model of 4WID-4WIS EV
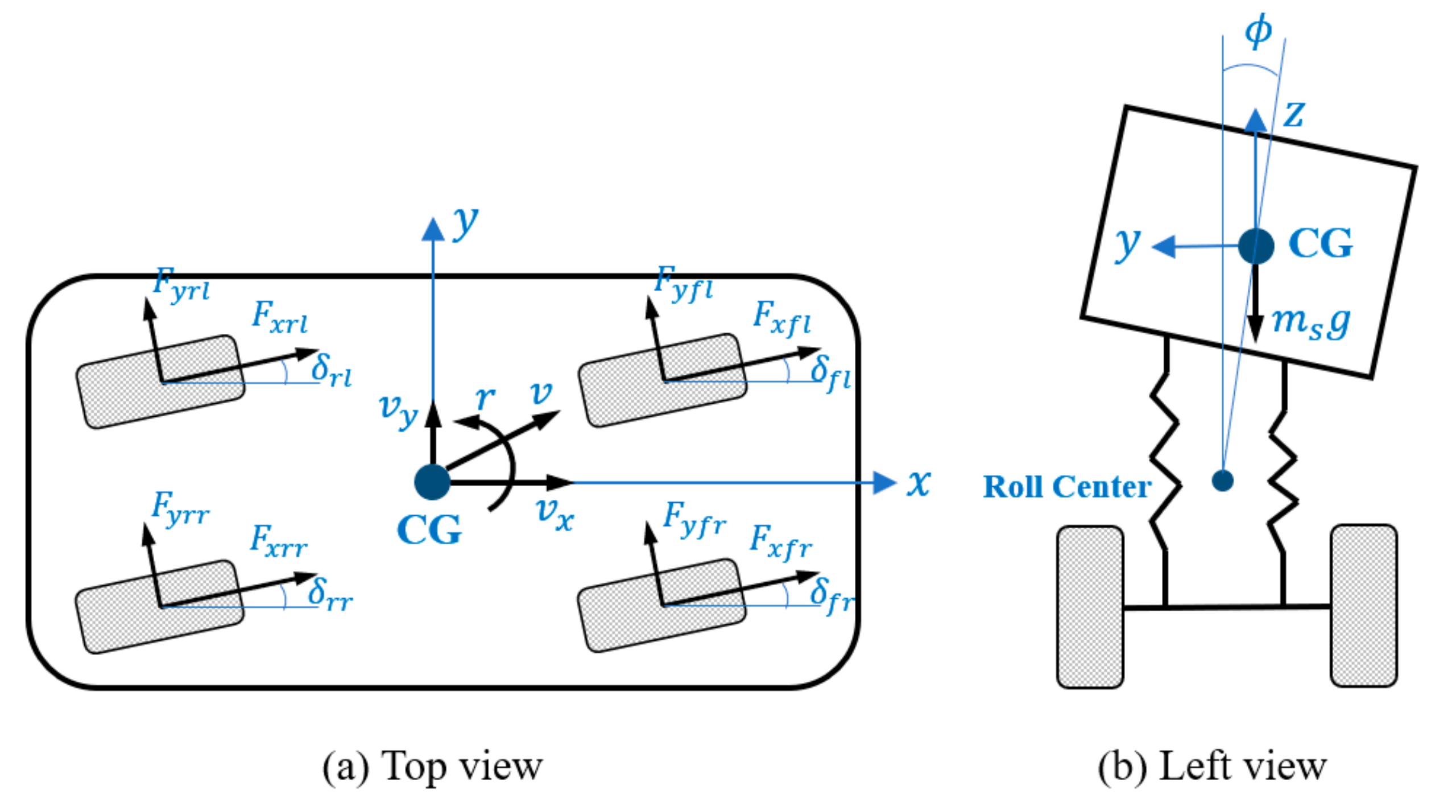
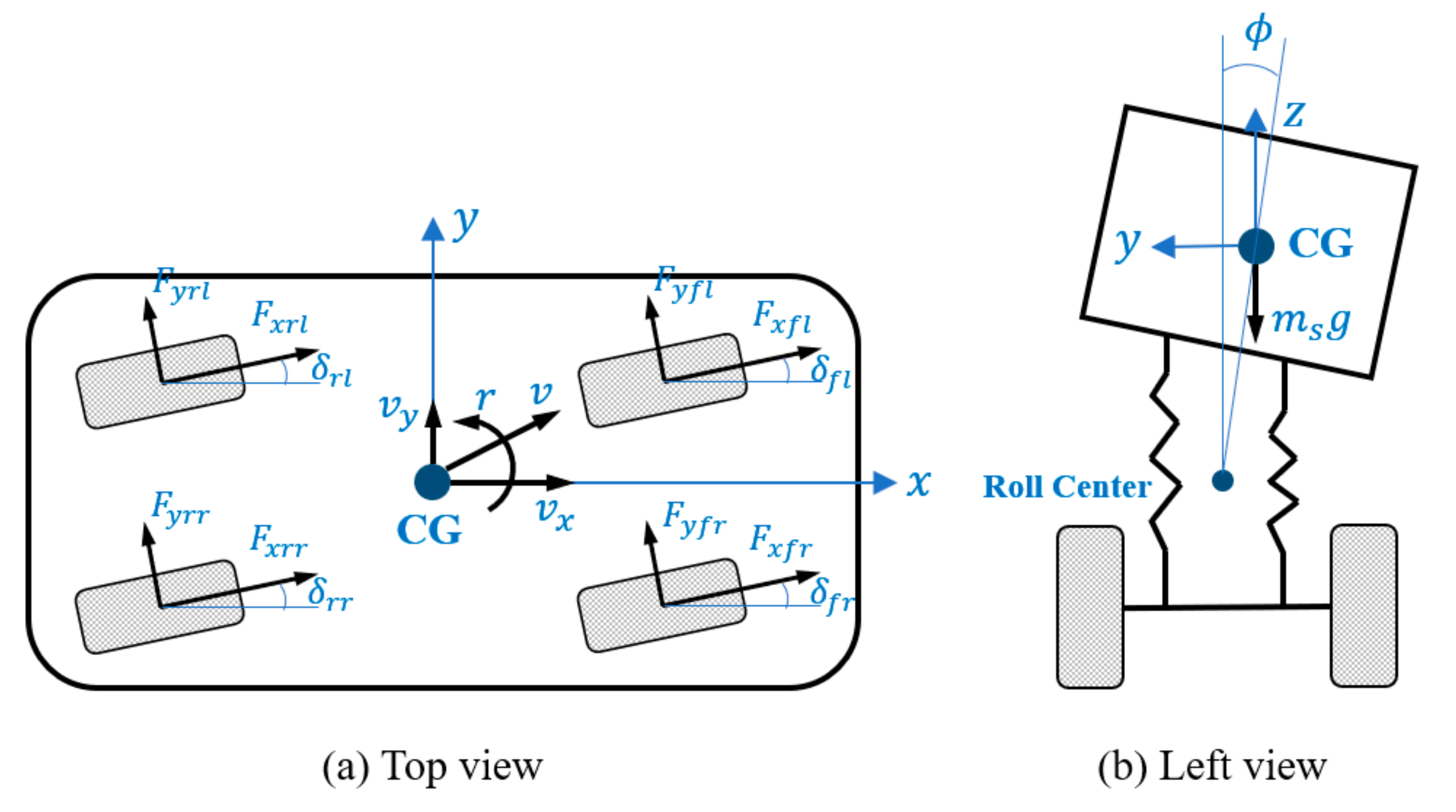
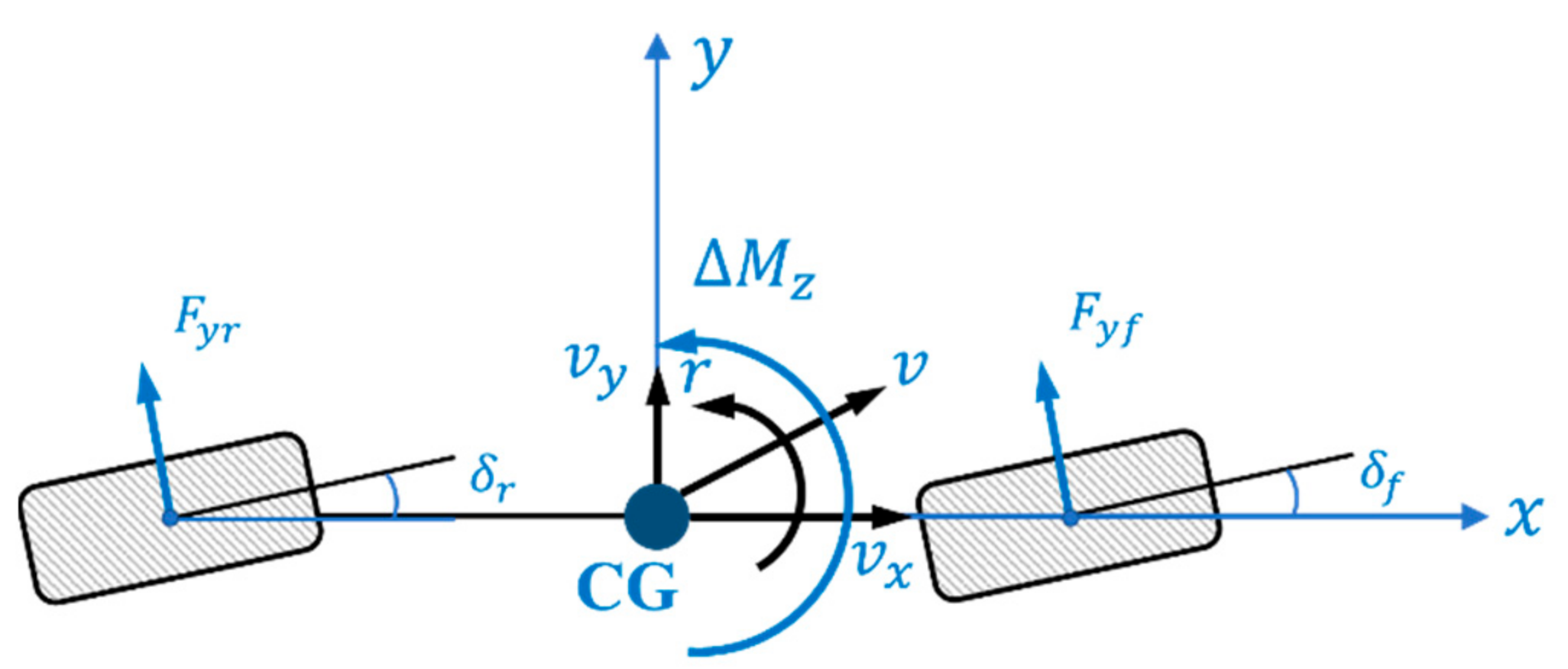
3.1. Vehicle Dynamic Model
3.2. Vehicle Kinematic Model
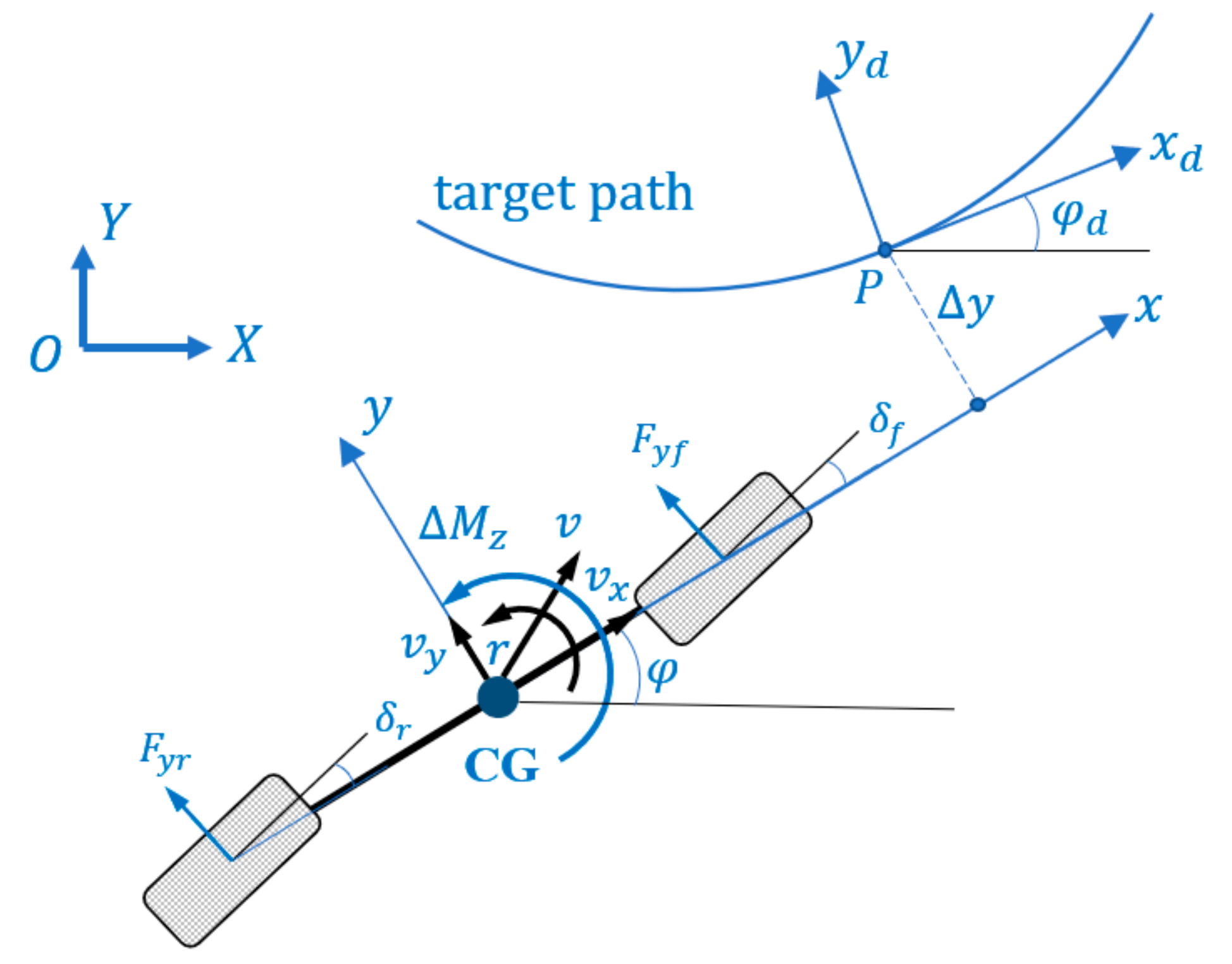
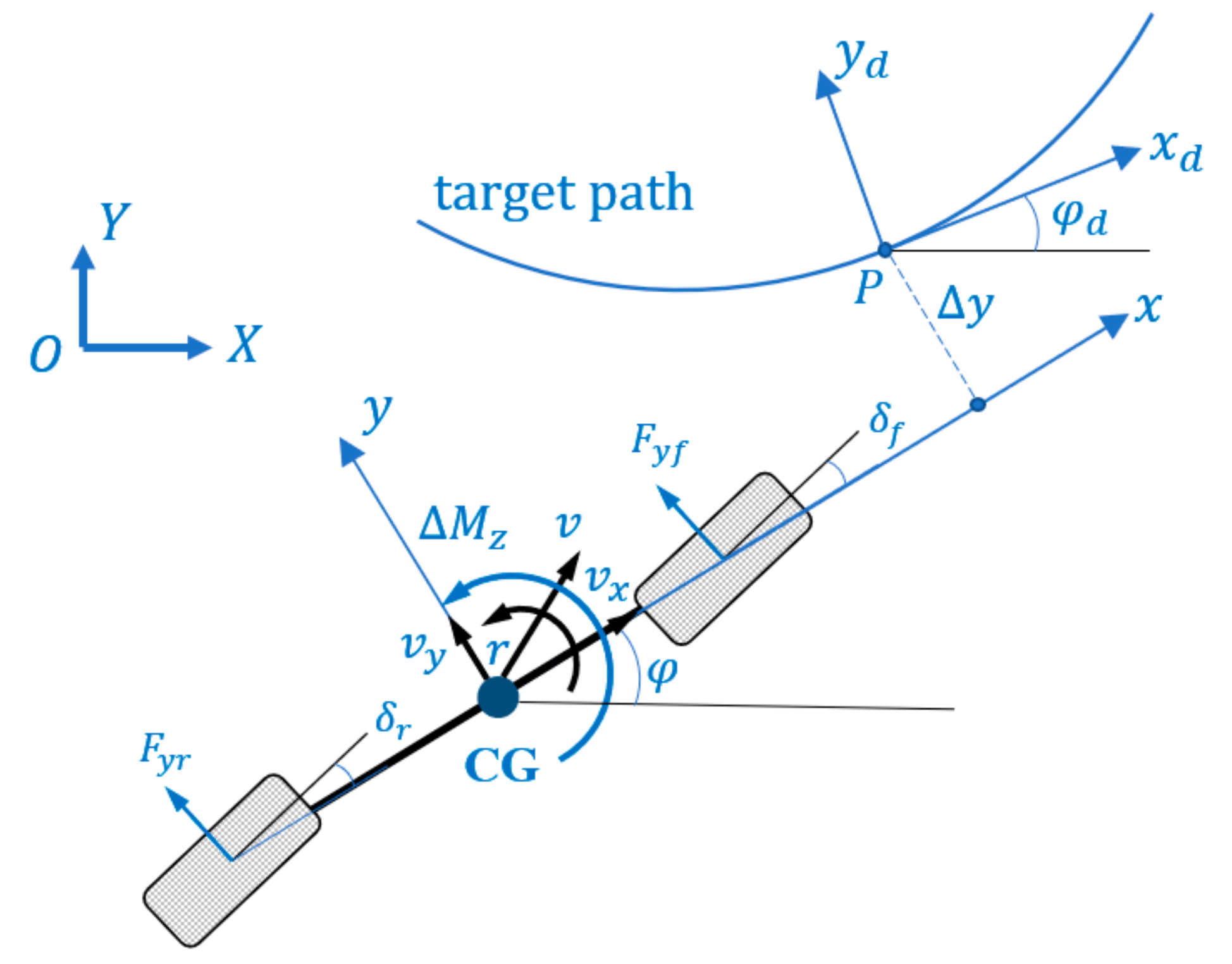
3.3. Path Tracking Model
4. Control of 4WID-4WIS EV for Autonomous Driving
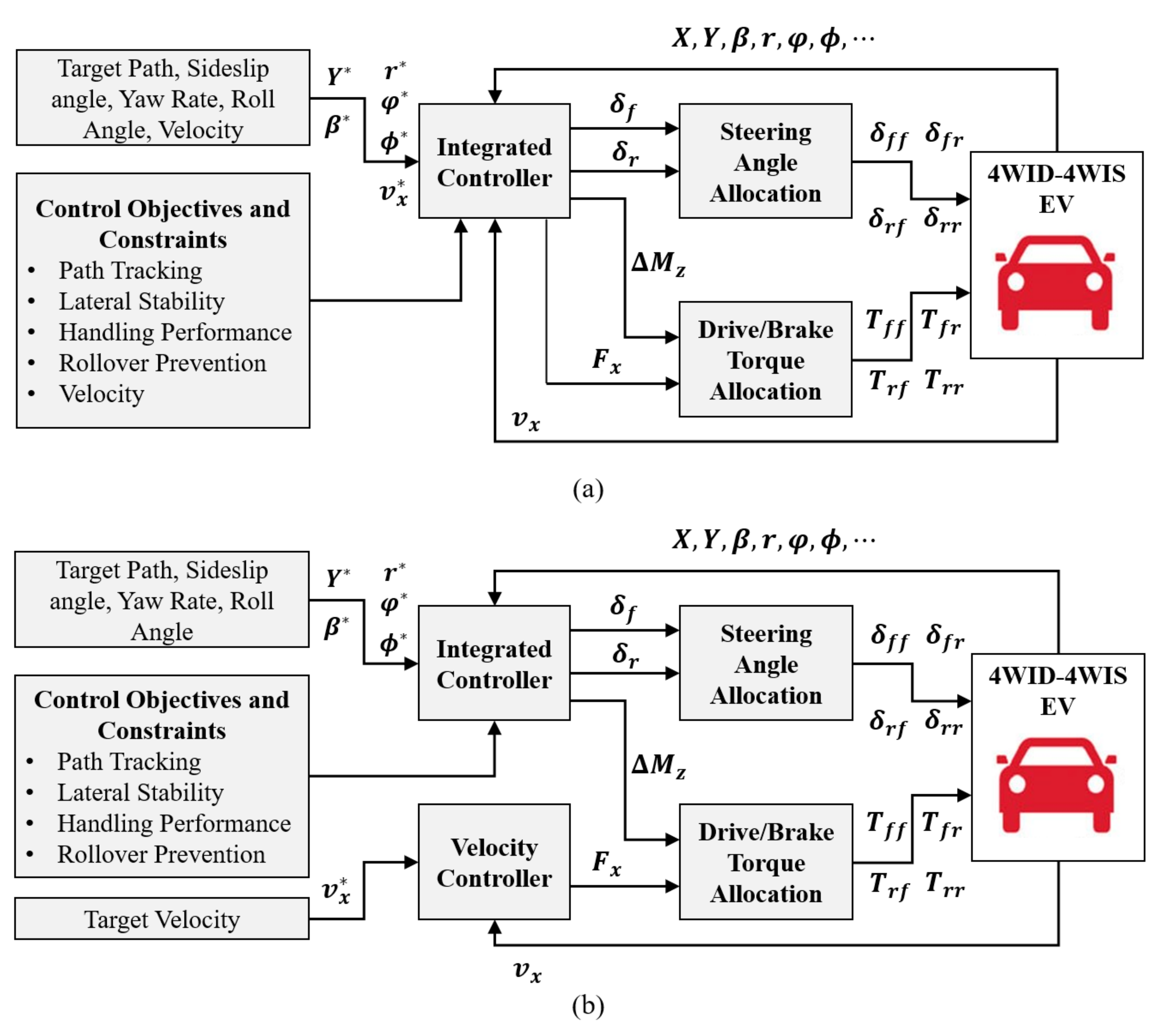
4.1. Control Framework of 4WID-4WIS EV
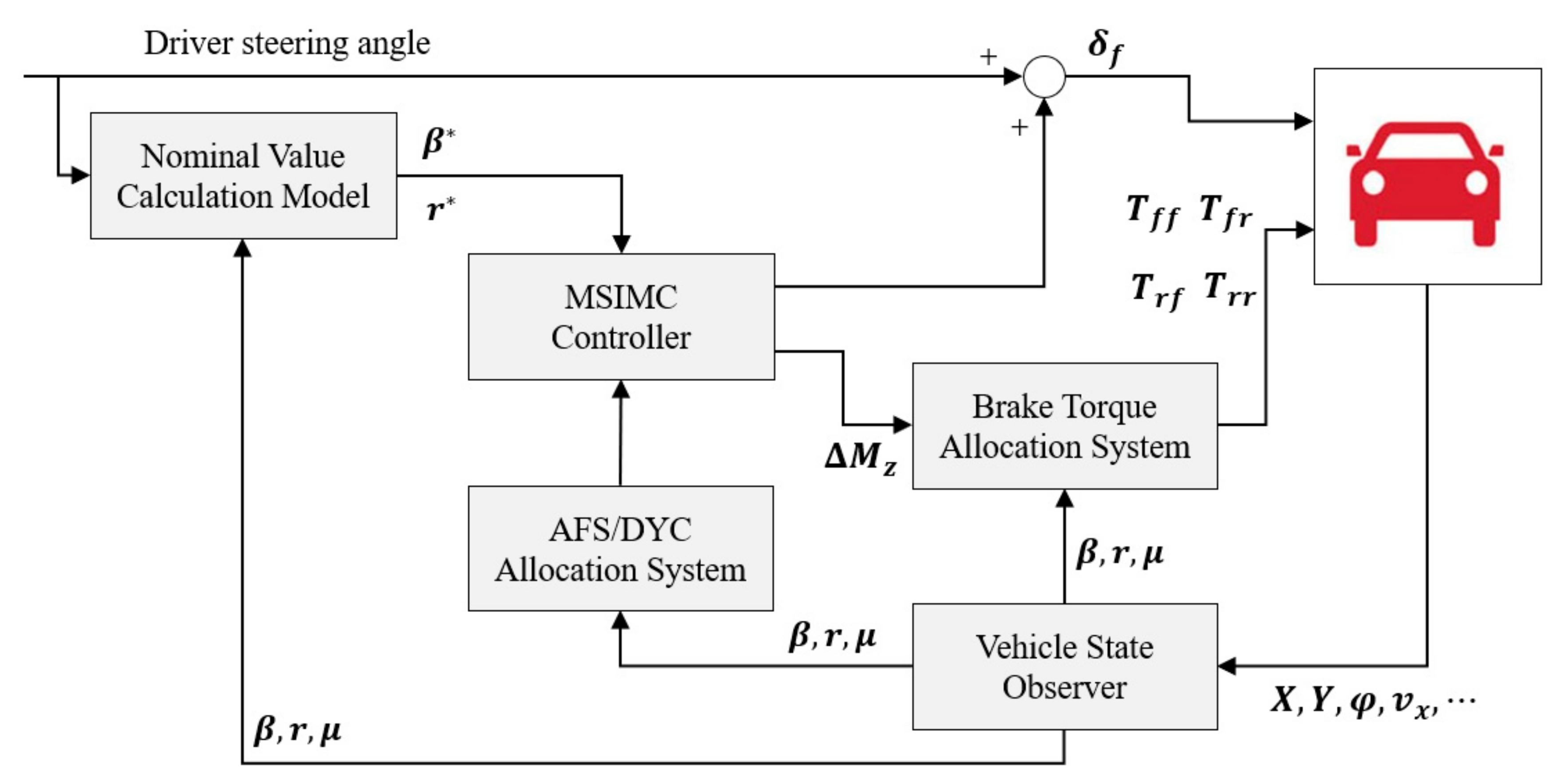
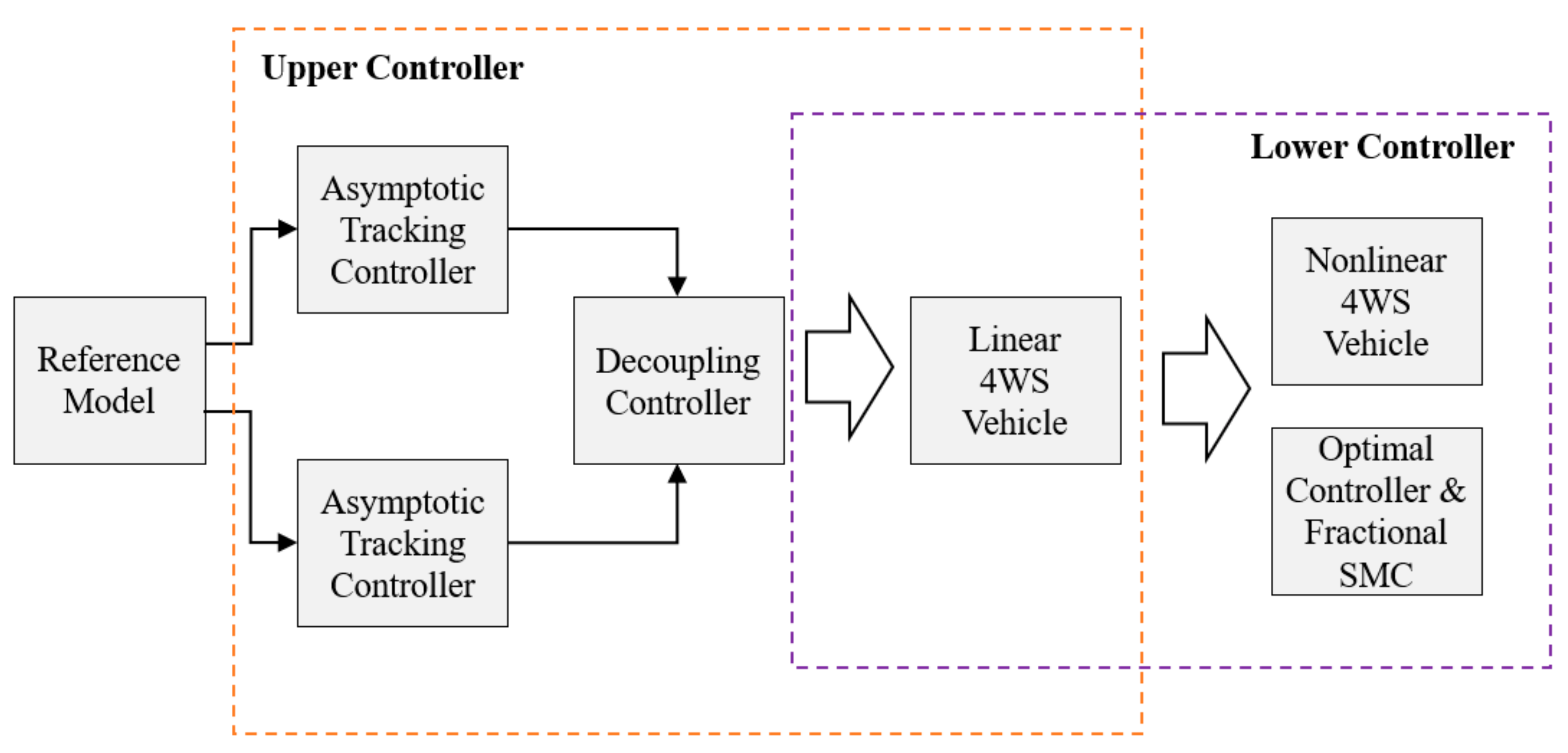
4.2. Handling Stability Control
4.3. Rollover Prevention Control
4.4. Path Trakcing Control
4.5. Active Fault-Tolerant Control
5. Challenges and Perspectives for 4WID-4WIS EV
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, G.; Cao, H.; Conradt, J.; Tang, H.; Rohrbein, F.; Knoll, A. Event-based neuromorphic vision for autonomous driving: A paradigm shift for bio-inspired visual sensing and perception. IEEE Signal Process. Mag. 2020, 37, 34–49. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, G.; Knoll, A. Globally optimal vertical direction estimation in Atlanta World. IEEE Trans. Pattern Anal. Mach. Intell. 2020. [Google Scholar] [CrossRef] [PubMed]
- Hang, P.; Lv, C.; Huang, C.; Xing, Y.; Hu, Z. Cooperative decision making of connected automated vehicles at multi-lane merging zone: A coalitional game approach. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Xing, Y.; Lv, C.; Cao, D.; Hang, P. Toward human-vehicle collaboration: Review and perspectives on human-centered collaborative automated driving. Transp. Res. Part C Emerg. Technol. 2021, 128, 103199. [Google Scholar] [CrossRef]
- Huang, C.; Huang, H.; Hang, P.; Gao, H.; Wu, J.; Huang, Z.; Lv, C. Personalized Trajectory Planning and Control of Lane-Change Maneuvers for Autonomous Driving. IEEE Trans. Veh. Technol. 2021, 70, 5511–5523. [Google Scholar] [CrossRef]
- Chen, X.; Hang, P.; Wang, W.; Li, Y. Design and analysis of a novel wheel type continuously variable transmission. Mech. Mach. Theory 2017, 107, 13–26. [Google Scholar] [CrossRef]
- Huang, C.; Lv, C.; Hang, P.; Xing, Y. Toward Safe and Personalized Autonomous Driving: Decision-Making and Motion Control with DPF and CDT Techniques. IEEE/ASME Trans. Mechatron. 2021, 26, 611–620. [Google Scholar] [CrossRef]
- Xing, Y.; Lv, C.; Mo, X.; Hu, Z.; Huang, C.; Hang, P. Toward Safe and Smart Mobility: Energy-Aware Deep Learning for Driving Behavior Analysis and Prediction of Connected Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4267–4280. [Google Scholar] [CrossRef]
- Van Rensselar, J. New vehicle technology and market innovation. Tribol. Lubr. Technol. 2020, 76, 26–34. [Google Scholar]
- Biček, M.; Pepelnjak, T.; Pušavec, F. Production aspect of direct drive in-wheel motors. Procedia CIRP 2019, 81, 1278–1283. [Google Scholar] [CrossRef]
- Unseld, R. The next generation of vehicles will no longer have mechanical steering. ATZelectron. Worldw. 2020, 15, 14–17. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J.; Xiang, C. Robust control in diagonal move steer mode and experiment on an X-by-wire UGV. IEEE/ASME Trans. Mechatron. 2019, 24, 572–584. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J.; Xiang, C. A review for design and dynamics control of unmanned ground vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1084–1100. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J.; Xiang, C. An AWID and AWIS X-by-wire UGV: Design and hierarchical chassis dynamics control. IEEE Trans. Intell. Transp. Syst. 2018, 20, 654–666. [Google Scholar] [CrossRef]
- Jiang, D.; Danhua, L.; Wang, S.; Tain, L.; Yang, L. Additional yaw moment control of a 4WIS and 4WID agricultural data acquisition vehicle. Int. J. Adv. Robot. Syst. 2015, 12, 78. [Google Scholar] [CrossRef] [Green Version]
- Demirci, M.; Gokasan, M. Adaptive optimal control allocation using Lagrangian neural networks for stability control of a 4WS–4WD electric vehicle. Trans. Inst. Meas. Control 2013, 35, 1139–1151. [Google Scholar] [CrossRef]
- Fahimi, F. Full drive-by-wire dynamic control for four-wheel-steer all-wheel-drive vehicles. Veh. Syst. Dyn. 2013, 51, 360–376. [Google Scholar] [CrossRef]
- Liang, Y.; Li, Y.; Yu, Y.; Zheng, L. Integrated lateral control for 4WID/4WIS vehicle in high-speed condition considering the magnitude of steering. Veh. Syst. Dyn. 2020, 58, 1711–1735. [Google Scholar] [CrossRef]
- Ko, J.W.; Ko, S.Y.; Kim, I.S.; Hyun, D.Y.; Kim, H.S. Co-operative control for regenerative braking and friction braking to increase energy recovery without wheel lock. Int. J. Automot. Technol. 2014, 15, 253–262. [Google Scholar] [CrossRef]
- Milanés, V.; González, C.; Naranjo, J.E.; Onieva, E.; Pedro, T.D. Electro-hydraulic braking system for autonomous vehicles. Int. J. Automot. Technol. 2010, 11, 89–95. [Google Scholar] [CrossRef]
- Xu, G.; Li, W.; Xu, K.; Song, Z. An intelligent regenerative braking strategy for electric vehicles. Energies 2011, 4, 1461–1477. [Google Scholar] [CrossRef] [Green Version]
- Lam, T.L.; Yan, J.; Qian, H.; Xu, Y. Traction/braking force distribution algorithm for omni-directional all-wheel-independent-drive vehicles. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Lee, M.H.; Li, T.H.S. Kinematics, dynamics and control design of 4WIS4WID mobile robots. J. Eng. 2015, 2015, 6–16. [Google Scholar] [CrossRef]
- Bünte, T.; Ho, L.M.; Satzger, C.; Brembeck, J. Central vehicle dynamics control of the robotic research platform robomobil. ATZelektron. Worldw. 2014, 9, 58–64. [Google Scholar] [CrossRef]
- De Castro, R.; Bünte, T.; Brembeck, J. Design and validation of the second generation of the robomobil’s vehicle dynamics controller. In Proceedings of the 24th Symposium of the International Association for Vehicle System Dynamics (IAVSD 2015), Graz, Austria, 17–21 August 2015. [Google Scholar]
- Birnschein, T.; Kirchner, F.; Girault, B.; Yuksel, M.; MacHowinski, J. An innovative, comprehensive concept for energy efficient electric mobility-EO smart connecting car. In Proceedings of the 2012 IEEE International Energy Conference and Exhibition (ENERGYCON), Florence, Italy, 9–12 September 2012. [Google Scholar]
- Kraus, M.; Harkort, C.; Wuebbolt-Gorbatenko, B.; Laumann, M. Fusion of Drive and Chassis for a People Mover. ATZ Worldw. 2018, 120, 46–51. [Google Scholar] [CrossRef]
- Li, C.; Song, P.; Chen, G.; Zong, C.; Liu, W. Driving and Steering Coordination Control for 4WID/4WIS Electric Vehicle; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2015. [Google Scholar]
- Liu, Y.; Zong, C.; Zhang, D.; Zheng, H.; Han, X.; Sun, M. Fault-tolerant control approach based on constraint control allocation for 4WIS/4WID vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2281–2295. [Google Scholar] [CrossRef]
- Lam, T.L.; Qian, H.; Xu, Y. Omnidirectional steering interface and control for a four-wheel independent steering vehicle. IEEE/ASME Trans. Mechatron. 2009, 15, 329–338. [Google Scholar]
- Qian, H.; Lam, T.L.; Li, W.; Xia, C. System and design of an omni-directional vehicle. In Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 21–26 February 2009. [Google Scholar]
- Lam, T.L.; Qian, H.; Xu, Y.; Xu, G. Omni-directional steer-by-wire interface for four wheel independent steering vehicle. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Ashley, S. Shrink-to-Fit Car for City Parking. In The New York Times; The New York Times Company: New York, NY, USA, 2012. [Google Scholar]
- Rasul, M.H.; Zamzuri, H.; Mustafa, A.M.A.; Ariff, M.H.M. Development of 4WIS SBW in-wheel drive compact electric vehicle platform. In Proceedings of the 2015 10th Asian Control Conference (ASCC), Sabah, Malaysia, 31 May–3 June 2015. [Google Scholar]
- Hang, P.; Chen, X. Path tracking control of 4-wheel-steering autonomous ground vehicles based on linear parameter-varying system with experimental verification. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 411–423. [Google Scholar]
- Hang, P.; Chen, X.; Luo, F. Path-Tracking Controller Design for a 4WIS and 4WID Electric Vehicle with Steer-by-Wire System; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2017. [Google Scholar]
- Hang, P.; Han, Y.; Chen, X.; Zhang, B. Design of an active collision avoidance system for a 4WIS-4WID electric vehicle. IFAC PapersOnLine 2018, 51, 771–777. [Google Scholar] [CrossRef]
- Choi, M.W.; Park, J.S.; Lee, B.S.; Lee, M.H. The performance of independent wheels steering vehicle (4WS) applied Ackerman geometry. In Proceedings of the 2008 International Conference on Control, Automation and Systems, Seoul, Korea, 14–17 October 2008. [Google Scholar]
- Tu, X. Robust Navigation Control and Headland Turning Optimization of Agricultural Vehicles. Ph.D. Thesis, Iowa State University, Ames, IA, USA, 2013. [Google Scholar]
- Jung, S.; Guenther, D.A. An Examination of the Maneuverability of an All Wheel Steer Vehicle at Low Speed; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1991. [Google Scholar]
- Hang, P.; Chen, X.; Fang, S.; Luo, F. Robust control for four-wheel-independent-steering electric vehicle with steer-by-wire system. Int. J. Automot. Technol. 2017, 18, 785–797. [Google Scholar] [CrossRef]
- Kobayashi, T.; Katsuyama, E.; Sugiura, H.; Ono, E.; Yamamoto, M. Efficient direct yaw moment control: Tyre slip power loss minimisation for four-independent wheel drive vehicle. Veh. Syst. Dyn. 2018, 56, 719–733. [Google Scholar] [CrossRef]
- Chen, X.; Fang, S.; Hang, P.; Luo, F.; Wu, X. The steering modes switching control of four wheels independently steering-by-wire vehicle based on path planning. In Proceedings of the FISITA 2016 World Automotive Congress, Busan, South Korea, 26–30 September 2016. [Google Scholar]
- Chen, X.; Luo, F.; Hang, P.; Luo, J. Steering Mode Switch Control of Four-Wheel-Independent-Steering Electric Vehicle. In Proceedings of the 19th Asia Pacific Automotive Engineering Conference & SAE-China Congress 2017, Shanghai, China, 24–26 October 2017; pp. 437–453. [Google Scholar]
- Xu, F.; Liu, X.; Chen, W.; Zhou, C. Dynamic switch control of steering modes for four wheel independent steering rescue vehicle. IEEE Access 2019, 7, 135595–135605. [Google Scholar] [CrossRef]
- Lai, X.; Chen, X.B.; Wu, X.J.; Liang, D. A study on control system for four-wheels independent driving and steering electric vehicle. Appl. Mech. Mater. 2015, 701, 807–811. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Fang, S. Controller design of steer-by-wire 4WIS electric vehicle with various steering modes. In Proceedings of the FISITA 2016 World Automotive Congress, Busan, Korea, 26–30 September 2016. [Google Scholar]
- Bai, G.; Liu, L.; Meng, Y.; Luo, W.; Gu, Q.; Ma, B. Path tracking of mining vehicles based on nonlinear model predictive control. Appl. Sci. 2019, 9, 1372. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Han, Y.; Hang, P. Researches on 4WIS-4WID Stability with LQR Coordinated 4WS and DYC. In The IAVSD International Symposium on Dynamics of Vehicles on Roads and Tracks; Springer: Cham, Switzerland, 2019; pp. 1508–1516. [Google Scholar]
- Hang, P.; Luo, F.; Fang, S.; Chen, X. Path tracking control of a four-wheel-independent-steering electric vehicle based on model predictive control. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017. [Google Scholar]
- Hang, P.; Chen, X. Integrated chassis control algorithm design for path tracking based on four-wheel steering and direct yaw-moment control. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 233, 625–641. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Zhang, B.; Tang, T. Longitudinal velocity tracking control of a 4WID electric vehicle. IFAC PapersOnLine 2018, 51, 790–795. [Google Scholar] [CrossRef]
- Baffet, G.; Charara, A.; Lechner, D. Estimation of vehicle sideslip, tire force and wheel cornering stiffness. Control Eng. Pract. 2009, 17, 1255–1264. [Google Scholar] [CrossRef] [Green Version]
- Ray, L.R. Nonlinear tire force estimation and road friction identification: Simulation and experiments. Automatica 1997, 33, 1819–1833. [Google Scholar] [CrossRef]
- Wang, R.; Wang, J. Tire–road friction coefficient and tire cornering stiffness estimation based on longitudinal tire force difference generation. Control Eng. Pract. 2013, 21, 65–75. [Google Scholar] [CrossRef]
- Pacejka, H.B.; Bakker, E. The magic formula tyre model. Veh. Syst. Dyn. 1992, 21, 1–18. [Google Scholar] [CrossRef]
- Ding, N.; Taheri, S. A modified Dugoff tire model for combined-slip forces. Tire Sci. Technol. 2010, 38, 228–244. [Google Scholar] [CrossRef]
- Guo, K.; Lu, D.; Chen, S.; Lin, W.C.; Lu, X. The UniTire model: A nonlinear and non-steady-state tyre model for vehicle dynamics simulation. Veh. Syst. Dyn. 2005, 43, 341–358. [Google Scholar] [CrossRef]
- Leng, B.; Jin, D.; Xiong, L.; Yang, X.; Yu, Z. Estimation of tire-road peak adhesion coefficient for intelligent electric vehicles based on camera and tire dynamics information fusion. Mech. Syst. Signal Process. 2021, 150, 107275. [Google Scholar] [CrossRef]
- Feng, Y.; Chen, H.; Zhao, H.; Zhou, H. Road tire friction coefficient estimation for four wheel drive electric vehicle based on moving optimal estimation strategy. Mech. Syst. Signal Process. 2020, 139, 106416. [Google Scholar] [CrossRef]
- Kim, S.; Nikravesh, P.E.; Gim, G. A two-dimensional tire model on uneven roads for vehicle dynamic simulation. Veh. Syst. Dyn. 2008, 46, 913–930. [Google Scholar] [CrossRef]
- Pacejka, H.B. Analysis of the dynamic response of a rolling string-type tire model to lateral wheel-plane vibrations. Veh. Syst. Dyn. 1972, 1, 37–66. [Google Scholar] [CrossRef]
- Hsu, Y.H.J.; Laws, S.M.; Gerdes, J.C. Estimation of tire slip angle and friction limits using steering torque. IEEE Trans. Control Syst. Technol. 2009, 18, 896–907. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Luo, F.; Fang, S. Robust control of a four-wheel-independent-steering electric vehicle for path tracking. SAE Int. J. Veh. Dyn. Stab. NVH 2017, 1, 307–316. [Google Scholar] [CrossRef]
- Hang, P.; Huang, S.; Chen, X.; Tan, K.K. Path planning of collision avoidance for unmanned ground vehicles: A nonlinear model predictive control approach. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 222–236. [Google Scholar]
- Hang, P.; Lv, C.; Huang, C.; Cai, J.; Hu, Z.; Xing, Y. An integrated framework of decision making and motion planning for autonomous vehicles considering social behaviors. IEEE Trans. Veh. Technol. 2020, 69, 14458–14469. [Google Scholar] [CrossRef]
- Hang, P.; Huang, C.; Hu, Z.; Xing, Y.; Lv, C. Decision Making of Connected Automated Vehicles at An Unsignalized Roundabout Considering Personalized Driving Behaviours. IEEE Trans. Veh. Technol. 2021, 70, 4051–4064. [Google Scholar] [CrossRef]
- Bai, G.; Meng, Y.; Liu, L.; Luo, W.; Gu, Q. Review and comparison of path tracking based on model predictive control. Electronics 2019, 8, 1077. [Google Scholar] [CrossRef] [Green Version]
- Hang, P.; Chen, X.; Luo, F. LPV/H∞ controller design for path tracking of autonomous ground vehicles through four-wheel steering and direct yaw-moment control. Int. J. Automot. Technol. 2019, 20, 679–691. [Google Scholar] [CrossRef]
- Bai, G.; Liu, L.; Meng, Y.; Luo, W.; Gu, Q.; Wang, J. Path tracking of wheeled mobile robots based on dynamic prediction model. IEEE Access 2019, 7, 39690–39701. [Google Scholar] [CrossRef]
- Han, Q.; Dai, L. A non-linear dynamic approach to the motion of four-wheel-steering vehicles under various operation conditions. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2008, 222, 535–549. [Google Scholar] [CrossRef]
- Durham, W.C. Constrained control allocation. J. Guid. Control Dyn. 1993, 16, 717–725. [Google Scholar] [CrossRef]
- Oppenheimer, M.W.; Doman, D.B.; Bolender, M.A. Control allocation for over-actuated systems. In Proceedings of the 2006 14th Mediterranean Conference on Control and Automation, Ancona, Italy, 28–30 June 2006. [Google Scholar]
- Harkegard, O. Efficient active set algorithms for solving constrained least squares problems in aircraft control allocation. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002. [Google Scholar]
- Xiong, L.; Yu, Z.; Jiang, W.; Jiang, Z. Research on vehicle stability control of 4WD electric vehicle based on longitudinal force control allocation. J. Tongji Univ. Nat. Sci. 2010, 38, 417–421. [Google Scholar]
- Zaccarian, L. Dynamic allocation for input redundant control systems. Automatica 2009, 45, 1431–1438. [Google Scholar] [CrossRef]
- Skjong, S.; Pedersen, E. Nonangular MPC-based thrust allocation algorithm for marine vessels—a study of optimal thruster commands. IEEE Trans. Transp. Electrif. 2017, 3, 792–807. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Hu, Z.; Fu, C.; Nan, F. Integrated control of AFS and DYC for in-wheel-motor electric vehicles based on operation region division. Int. J. Veh. Des. 2019, 79, 221–247. [Google Scholar] [CrossRef]
- Feng, T.; Wang, Y.; Li, Q. Coordinated control of active front steering and active disturbance rejection sliding mode-based DYC for 4WID-EV. Meas. Control 2020, 53, 1870–1882. [Google Scholar] [CrossRef]
- Huang, G.; Yuan, X.; Shi, K.; Wu, X. A BP-PID controller-based multi-model control system for lateral stability of distributed drive electric vehicle. J. Frankl. Inst. 2019, 356, 7290–7311. [Google Scholar] [CrossRef]
- Li, L.; Jia, G.; Chen, J.; Zhu, H.; Cao, D.; Song, J. A novel vehicle dynamics stability control algorithm based on the hierarchical strategy with constrain of nonlinear tyre forces. Veh. Syst. Dyn. 2015, 53, 1093–1116. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, C. Electronic stability control for improving stability for an eight in-wheel motor-independent drive electric vehicle. Shock Vib. 2019, 2019, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Liang, X.; Wang, Q.; Zhao, L.; Wang, X. Extension coordinated control of four wheel independent drive electric vehicles by AFS and DYC. Control Eng. Pract. 2020, 101, 104504. [Google Scholar] [CrossRef]
- Wu, J.; Zhao, Y.Q.; Ji, X.W.; Liu, Y.H.; Yin, C.Q. A modified structure internal model robust control method for the integration of active front steering and direct yaw moment control. Sci. China Technol. Sci. 2015, 58, 75–85. [Google Scholar] [CrossRef]
- Canale, M.; Fagiano, L. Stability control of 4WS vehicles using robust IMC techniques. Veh. Syst. Dyn. 2008, 46, 991–1011. [Google Scholar] [CrossRef]
- Li, M.; Jia, Y. Decoupling control in velocity-varying four-wheel steering vehicles with H∞ performance by longitudinal velocity and yaw rate feedback. Veh. Syst. Dyn. 2014, 52, 1563–1583. [Google Scholar] [CrossRef]
- Li, M.; Jia, Y.; Du, J. LPV control with decoupling performance of 4WS vehicles under velocity-varying motion. IEEE Trans. Control Syst. Technol. 2014, 22, 1708–1724. [Google Scholar]
- Li, M.; Jia, Y.; Matsuno, F. Attenuating diagonal decoupling with robustness for velocity-varying 4WS vehicles. Control Eng. Pract. 2016, 56, 49–59. [Google Scholar] [CrossRef]
- Men, J.; Wu, B.; Chen, J.; Zhang, Z. Comparisons of vehicle stability controls based on 4WS, Brake, Brake-FAS and IMC techniques. Veh. Syst. Dyn. 2012, 50, 1053–1084. [Google Scholar]
- Men, J.; Wu, B.; Chen, J. Comparisons of 4WS and Brake-FAS based on IMC for vehicle stability control. J. Mech. Sci. Technol. 2011, 25, 1265–1277. [Google Scholar]
- Russell, H.E.B.; Gerdes, J.C. Design of variable vehicle handling characteristics using four-wheel steer-by-wire. IEEE Trans. Control Syst. Technol. 2015, 24, 1529–1540. [Google Scholar] [CrossRef]
- Wu, Y.; Li, B.; Zhang, N.; Du, H.; Zhang, B. Rear-steering based decentralized control of four-wheel steering vehicle. IEEE Trans. Veh. Technol. 2020, 69, 10899–10913. [Google Scholar] [CrossRef]
- Yaniv, O. Robustness to speed of 4WS vehicles for yaw and lateral dynamics. Veh. Syst. Dyn. 1997, 27, 221–234. [Google Scholar] [CrossRef]
- Canale, M.; Fagiano, L. Comparing rear wheel steering and rear active differential approaches to vehicle yaw control. Veh. Syst. Dyn. 2010, 48, 529–546. [Google Scholar] [CrossRef]
- Yu, H.; Gao, L. Two-degree-of-freedom vehicle steering controllers design based on four-wheel-steering-by-wire. Int. J. Veh. Auton. Syst. 2007, 5, 47–78. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.; Qin, X.; Wang, C. Yaw and lateral stability control for four-wheel steer-by-wire system. IEEE/ASME Trans. Mechatron. 2018, 23, 2628–2637. [Google Scholar] [CrossRef]
- Zhao, W.Z.; Qin, X.X. Study on mixed H2/H∞ robust control strategy of four wheel steering system. Sci. China Technol. Sci. 2017, 60, 1831–1840. [Google Scholar] [CrossRef]
- Li, M.; Jia, Y. Precompensation decoupling control with H∞ performance for 4WS velocity-varying vehicles. Int. J. Syst. Sci. 2016, 47, 3864–3875. [Google Scholar] [CrossRef]
- Yin, G.; Chen, N.; Li, P. Improving Handling Stability Performance of Four-Wheel Steering Vehicle via μ-Synthesis Robust Control. IEEE Trans. Veh. Technol. 2007, 56, 2432–2439. [Google Scholar] [CrossRef]
- Yin, G.D.; Chen, N.; Wang, J.X.; Wu, L.Y. A study on μ-synthesis control for four-wheel steering system to enhance vehicle lateral stability. J. Dyn. Syst. Meas. Control 2011, 133, 011002. [Google Scholar] [CrossRef]
- Abe, M.; Ohkubo, N.; Kano, Y. Comparison of 4WS and Direct Yaw Moment Control (DYC) for Improvement of Vehicle Handling Performance. JSAE Rev. 1995, 2, 214. [Google Scholar]
- Abe, M.; Ohkubo, N.; Kano, Y. A direct yaw moment control for improving limit performance of vehicle handling-comparison and cooperation with 4WS. Veh. Syst. Dyn. 1996, 25, 3–23. [Google Scholar] [CrossRef]
- Tianjun, Z.; Changfu, Z. Research on control algorithm for DYC and integrated control with 4WS. In Proceedings of the 2009 International Conference on Computational Intelligence and Natural Computing, Wuhan, China, 6–7 June 2009. [Google Scholar]
- Nagai, M.; Hirano, Y.; Yamanaka, S. Integrated control of active rear wheel steering and direct yaw moment control. Veh. Syst. Dyn. 1997, 27, 357–370. [Google Scholar] [CrossRef]
- Zhou, L.; Ou, L.; Wang, C. A simulation of the four-wheel steering vehicle stability based on DYC control. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009. [Google Scholar]
- Hang, P.; Xia, X.; Chen, X. Handling Stability Advancement With 4WS and DYC Coordinated Control: A Gain-Scheduled Robust Control Approach. IEEE Trans. Veh. Technol. 2021, 70, 3164–3174. [Google Scholar] [CrossRef]
- Furukawa, Y.; Abe, M. Advanced chassis control systems for vehicle handling and active safety. Veh. Syst. Dyn. 1997, 28, 59–86. [Google Scholar] [CrossRef]
- Chen, B.C.; Peng, H. Differential-braking-based rollover prevention for sport utility vehicles with human-in-the-loop evaluations. Veh. Syst. Dyn. 2001, 36, 359–389. [Google Scholar] [CrossRef]
- Rajamani, R.; Piyabongkarn, D.N. New paradigms for the integration of yaw stability and rollover prevention functions in vehicle stability control. IEEE Trans. Intell. Transp. Syst. 2012, 14, 249–261. [Google Scholar] [CrossRef]
- Yoon, J.; Cho, W.; Koo, B.; Yi, K. Unified chassis control for rollover prevention and lateral stability. IEEE Trans. Veh. Technol. 2008, 58, 596–609. [Google Scholar] [CrossRef]
- Huang, H.H.; Yedavalli, R.K.; Guenther, D.A. Active roll control for rollover prevention of heavy articulated vehicles with multiple-rollover-index minimisation. Veh. Syst. Dyn. 2012, 50, 471–493. [Google Scholar] [CrossRef]
- Yim, S. Design of a preview controller for vehicle rollover prevention. IEEE Trans. Veh. Technol. 2011, 60, 4217–4226. [Google Scholar] [CrossRef]
- Schofield, B.; Hagglund, T.; Rantzer, A. Vehicle dynamics control and controller allocation for rollover prevention. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006. [Google Scholar]
- Zhang, B.; Khajepour, A.; Goodarzi, A. Vehicle yaw stability control using active rear steering: Development and experimental validation. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2017, 231, 333–345. [Google Scholar] [CrossRef]
- Zhang, Y.; Khajepour, A.; Xie, X. Rollover prevention for sport utility vehicles using a pulsed active rear-steering strategy. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2016, 230, 1239–1253. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Wang, W. Cooperative Control Framework for Human Driver and Active Rear Steering System to Advance Active Safety. IEEE Trans. Intell. Veh. 2020. [Google Scholar] [CrossRef]
- Alfi, A.; Farrokhi, M. Hybrid state-feedback sliding-mode controller using fuzzy logic for four-wheel-steering vehicles. Veh. Syst. Dyn. 2009, 47, 265–284. [Google Scholar] [CrossRef]
- Tian, J.; Ding, J.; Tai, Y.; Chen, N. Hierarchical control of nonlinear active four-wheel-steering vehicles. Energies 2018, 11, 2930. [Google Scholar] [CrossRef] [Green Version]
- Song, J. Integrated control of brake pressure and rear-wheel steering to improve lateral stability with fuzzy logic. Int. J. Automot. Technol. 2012, 13, 563–570. [Google Scholar] [CrossRef]
- Lee, S.; Yakub, F.; Kasahara, M.; Mori, Y. Rollover prevention with predictive control of differential braking and rear wheel steering. In Proceedings of the 2013 6th IEEE Conference on Robotics, Automation and Mechatronics (RAM), Manila, Philippines, 12–15 November 2013. [Google Scholar]
- Zhou, Z.; Miaohua, H.; Yachao, Z.; Chen, F. Vehicle Stability Control through Optimized Coordination of Active Rear Steering and Differential Driving/Braking. SAE Int. J. Passeng. Cars Mech. Syst. 2018, 11, 239–248. [Google Scholar] [CrossRef]
- Wu, J.; Cheng, S.; Liu, B.; Liu, C. A human-machine-cooperative-driving controller based on AFS and DYC for vehicle dynamic stability. Energies 2017, 10, 1737. [Google Scholar] [CrossRef] [Green Version]
- He, X.; Yang, K.; Liu, Y.; Ji, X. A Novel Direct Yaw Moment Control System for Autonomous Vehicle; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Lin, F.; Zhang, Y.; Zhao, Y.; Yin, G.; Zhang, H.; Wang, K. Trajectory tracking of autonomous vehicle with the fusion of DYC and longitudinal–lateral control. Chin. J. Mech. Eng. 2019, 32, 1–16. [Google Scholar] [CrossRef]
- Mashadi, B.; Ahmadizadeh, P.; Majidi, M. Integrated Controller Design for Path Following in Autonomous Vehicles; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2011. [Google Scholar]
- Tu, X.; Gai, J.; Tang, L. Robust navigation control of a 4WD/4WS agricultural robotic vehicle. Comput. Electron. Agric. 2019, 164, 104892. [Google Scholar] [CrossRef]
- Lei, Y.; Wen, G.; Fu, Y.; Li, X.; Hou, B.; Geng, X. Trajectory-following of a 4WID-4WIS vehicle via feedforward–backstepping sliding-mode control. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021. [Google Scholar] [CrossRef]
- Li, B.; Du, H.; Li, W. Trajectory control for autonomous electric vehicles with in-wheel motors based on a dynamics model approach. IET Intell. Transp. Syst. 2016, 10, 318–330. [Google Scholar] [CrossRef]
- Guo, J.; Luo, Y.; Li, K.; Dai, Y. Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation. Mech. Syst. Signal Process. 2018, 105, 183–199. [Google Scholar] [CrossRef]
- Liu, R.; Wei, M.; Zhao, W. Trajectory tracking control of four wheel steering under high speed emergency obstacle avoidance. Int. J. Veh. Des. 2018, 77, 1–21. [Google Scholar] [CrossRef]
- Hu, C.; Wang, R.; Yan, F.; Chadli, M.; Chen, N. Output constraint control on path following of four-wheel independently actuated autonomous vehicles. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015. [Google Scholar]
- Hiraoka, T.; Nishihara, O.; Kumamoto, H. Automatic path-tracking controller of a four-wheel steering vehicle. Veh. Syst. Dyn. 2009, 47, 1205–1227. [Google Scholar] [CrossRef]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Sun, X. Simultaneous path following and lateral stability control of 4WD-4WS autonomous electric vehicles with actuator saturation. Adv. Eng. Softw. 2019, 128, 46–54. [Google Scholar] [CrossRef]
- Mashadi, B.; Ahmadizadeh, P.; Majidi, M.; Mahmoodi-Kaleybar, M. Integrated robust controller for vehicle path following. Multibody Syst. Dyn. 2015, 33, 207–228. [Google Scholar] [CrossRef]
- Zhang, H.; Heng, B.; Zhao, W. Path tracking control for active rear steering vehicles considering driver steering characteristics. IEEE Access 2020, 8, 98009–98017. [Google Scholar] [CrossRef]
- Liu, R.; Wei, M.; Sang, N.; Wei, J. Research on curved path tracking control for four-wheel steering vehicle considering road adhesion coefficient. Math. Probl. Eng. 2020, 2020, 1–18. [Google Scholar] [CrossRef]
- Yu, C.; Zheng, Y.; Shyrokau, B.; Ivanov, V. MPC-based path following design for automated vehicles with rear wheel steering. In Proceedings of the 2021 IEEE International Conference on Mechatronics (ICM), Kashiwa, Japan, 7–9 March 2021. [Google Scholar]
- Wang, Y.; Zong, C.; Li, K.; Chen, H. Fault-tolerant control for in-wheel-motor-driven electric ground vehicles in discrete time. Mech. Syst. Signal Process. 2019, 121, 441–454. [Google Scholar] [CrossRef]
- Li, C.; Chen, G.; Zong, C. Fault-Tolerant Control for 4WID/4WIS Electric Vehicles; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2014. [Google Scholar] [CrossRef]
- Shi, K.; Yuan, X. MPC-based fault tolerant control system for yaw stability of distributed drive electric vehicle. In Proceedings of the 2019 3rd Conference on Vehicle Control and Intelligence (CVCI), Hefei, China, 21–22 September 2019. [Google Scholar]
- Liu, L.; Shi, K.; Yuan, X.; Li, Q. Multiple model-based fault-tolerant control system for distributed drive electric vehicle. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 1–15. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, W.; Wang, J. Fault-tolerant control for electric vehicles with independently driven in-wheel motors considering individual driver steering characteristics. IEEE Trans. Veh. Technol. 2019, 68, 4527–4536. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, G.; Zhou, H.; Zhao, W. Adaptive sliding mode fault-tolerant coordination control for four-wheel independently driven electric vehicles. IEEE Trans. Ind. Electron. 2018, 65, 9090–9100. [Google Scholar] [CrossRef]
- Li, B.; Du, H.; Li, W. Fault-tolerant control of electric vehicles with in-wheel motors using actuator-grouping sliding mode controllers. Mech. Syst. Signal Process. 2016, 72, 462–485. [Google Scholar] [CrossRef] [Green Version]
- Guo, B.; Chen, Y. Robust adaptive fault-tolerant control of four-wheel independently actuated electric vehicles. IEEE Trans. Ind. Inform. 2019, 16, 2882–2894. [Google Scholar] [CrossRef]
- Zhang, B.; Lu, S.; Zhao, L.; Xiao, K. Fault-tolerant control based on 2D game for independent driving electric vehicle suffering actuator failures. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 3011–3025. [Google Scholar] [CrossRef]
- Zhang, B.; Lu, S. Fault-tolerant control for four-wheel independent actuated electric vehicle using feedback linearization and cooperative game theory. Control Eng. Pract. 2020, 101, 104510. [Google Scholar] [CrossRef]
- Luo, Y.; Luo, J.; Qin, Z. Model-independent self-tuning fault-tolerant control method for 4WID EV. Int. J. Automot. Technol. 2016, 17, 1091–1100. [Google Scholar] [CrossRef]
- Liu, C.; Zong, C.; He, L.; Li, C.; Liu, M. Actuator Fault Detection and Diagnosis of 4WID/4WIS Electric Vehicles. SAE Int. J. Passeng. Cars Electron. Electr. Syst. 2013, 7. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, H.; Huang, X.; Wang, J.; Yu, H.; Graaf, R. Active fault-tolerant control for electric vehicles with independently driven rear in-wheel motors against certain actuator faults. IEEE Trans. Control Syst. Technol. 2015, 24, 1557–1572. [Google Scholar] [CrossRef]
- Liu, C.; Zong, C.; He, L.; Liu, J.; Li, C. Passive Fault-Tolerant Performance of 4WID/4WIS Electric Vehicles Based on MPC and Control Allocation; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2013. [Google Scholar]
- Chen, T.; Chenc, L.; Xu, X.; Cai, Y.; Jiang, H.; Sun, X. Passive fault-tolerant path following control of autonomous distributed drive electric vehicle considering steering system fault. Mech. Syst. Signal Process. 2019, 123, 298–315. [Google Scholar] [CrossRef]
- Mihály, A.; Gáspár, P. Reconfgurable fault-tolerant control of in-wheel electric vehicles with steering system failure. IFAC PapersOnLine 2015, 48, 49–54. [Google Scholar] [CrossRef]
- Zhang, Y.; Zheng, H.; Zhang, J.; Cheng, C. A Fault-Tolerant Control Method for 4WIS/4WID Electric Vehicles Based on Reconfigurable Control Allocation; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
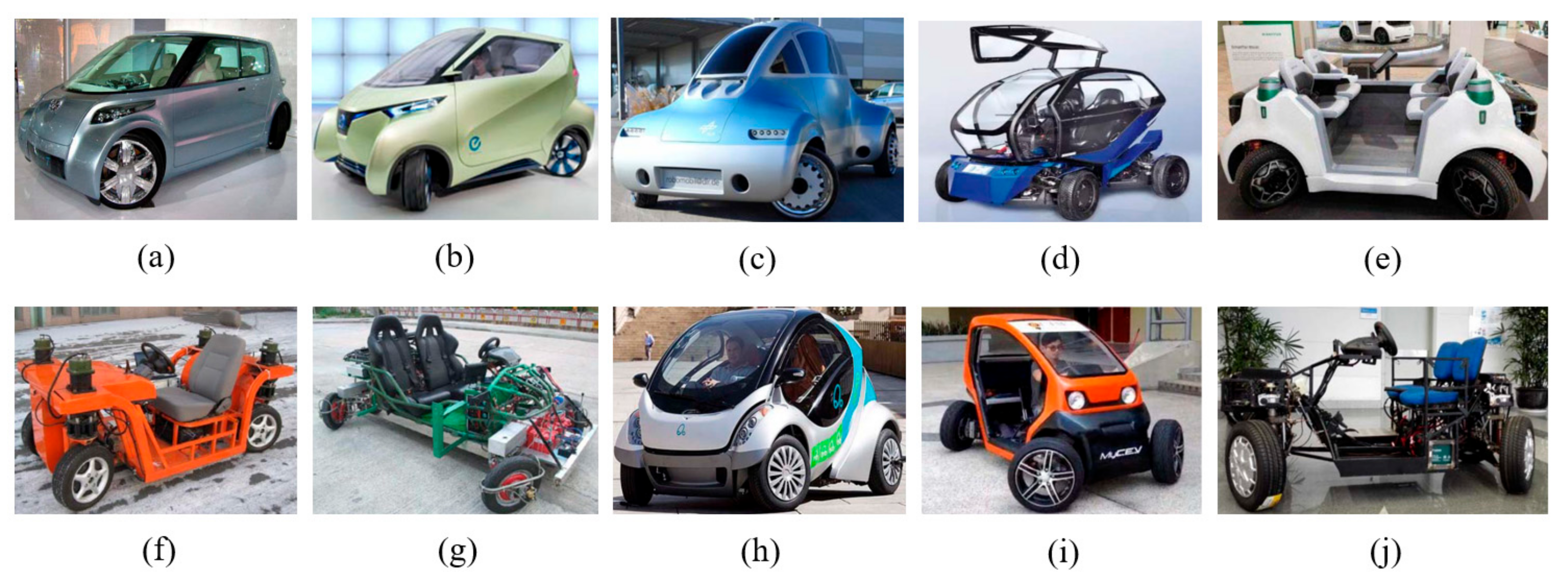
| Protype | Steering Angle | Speed | Autonomous Driving | Reference |
|---|---|---|---|---|
| Toyota Fine-T | - | [22] | ||
| Nissan PIVO3 | - | [23] | ||
| ROboMObil | 100 km/h | [24,25] | ||
| DFKI EO Smart 2 | 65 km/h | [26] | ||
| Schaeffler Mover | 60 km/h | [27] | ||
| Jilin University | 8 km/h | [28,29] | ||
| CUHK OK-1 | 10 km/h | [30,31,32] | ||
| MIT Hiriko | 50 km/h | [33] | ||
| UTM | 30 km/h | [34] | ||
| Tongji University | 10 km/h | [35,36,37] | ||
| FABOT | 3 km/h | [38] | ||
| AgRover | 5 km/h | [39] |
| Type | Steering | Drive | Braking | Suspension |
|---|---|---|---|---|
| Protean | In-wheel motor () | HB + Motor | Candle type | |
| Schaeffler | In-wheel motor () | HB + Motor | Trailing arm type | |
| ROboMObil | In-wheel motor () | HB + Motor | Double wishbone type | |
| Tongji | In-wheel motor () | HB + Motor | Candle type |
| Control Strategy | Control Variable |
|---|---|
| AFS | |
| AFS + DYC | , |
| 4WS | , |
| 4WS + DYC | ,, |
| Reference | Control Objective | Control Model | Control Strategy | Control Algorithm | Test Environment |
|---|---|---|---|---|---|
| [80] | HS | 2DOF | AFS + DYC | BP PID | Simulation |
| [81] | HS | 2DOF | AFS + DYC | LQR | HIL Test |
| [82] | HS | 2DOF | AFS + DYC | SMC | HIL Test |
| [83] | HS | 2DOF | AFS + DYC | Coordinated control | HIL Test |
| [84] | HS | 2DOF | AFS + DYC | H∞ control | Simulation |
| [89] | HS | 2DOF | 4WS | Internal model control | Simulation |
| [90] | HS | 2DOF | 4WS | Internal model control | Simulation |
| [99] | HS | 2DOF | 4WS | μ-synthesis | Simulation |
| [100] | HS | 2DOF | 4WS | μ-synthesis | HIL Test |
| [92] | HS | 2DOF | 4WS | Feed-forward control | Simulation |
| [97] | HS | 2DOF | 4WS | H2/H∞ | Simulation |
| [95] | HS | 2DOF | 4WS | LPV H∞ | Simulation |
| [96] | HS | 2DOF | 4WS | μ-synthesis | Road Test |
| [87] | HS + VC | 3DOF | 4WS | LPV | Simulation |
| [88] | HS + VC | 3DOF | 4WS | Decoupling control | Simulation |
| [98] | HS + VC | 3DOF | 4WS | Decoupling control | Simulation |
| [102] | HS | 2DOF | 4WS + DYC | Feed-forward, feedback | Simulation |
| [104] | HS | 2DOF | 4WS + DYC | H∞ control | Simulation |
| [105] | HS | 2DOF | 4WS + DYC | fuzzy control | Simulation |
| [111] | HS + RP | 3DOF | AFS + DYC | LQR | Simulation |
| [117] | HS + RP | 3DOF | 4WS | Fuzzy SMC | Simulation |
| [118] | HS + RP | 3DOF | 4WS | Fractional SMC | Simulation |
| [116] | HS + RP | 3DOF | 4WS | LTV-MPC | Simulation |
| [119] | HS + RP + VC | 4DOF | 4WS | Fuzzy logic | Simulation |
| [121] | HS + RP | 3DOF | 4WS + DYC | SMC | Simulation |
| [123] | PT + HS | 2DOF | AFS + DYC | H∞ control | Simulation |
| [124] | PT + HS + VC | 3DOF | AFS + DYC | MPC | Simulation |
| [129] | PT + HS | 2DOF | AFS + DYC | LTV-MPC | Road Test |
| [127] | PT + HS | 2DOF | 4WS | SMC | Simulation |
| [132] | PT + HS | 2DOF | 4WS | SMC | Simulation |
| [126] | PT + VC | 3DOF | 4WS | Backstepping SMC | Road Test |
| [136] | PT + VC | 3DOF | 4WS | MPC | Simulation |
| [137] | PT + VC | 3DOF | 4WS | MPC | Simulation |
| [125] | PT | 2DOF | 4WS + DYC | LQR | Simulation |
| [133] | PT + HS | 2DOF | 4WS + DYC | Hamilton | Simulation |
| [134] | PT + HS | 2DOF | 4WS + DYC | μ-synthesis | Simulation |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hang, P.; Chen, X. Towards Autonomous Driving: Review and Perspectives on Configuration and Control of Four-Wheel Independent Drive/Steering Electric Vehicles. Actuators 2021, 10, 184. https://doi.org/10.3390/act10080184
Hang P, Chen X. Towards Autonomous Driving: Review and Perspectives on Configuration and Control of Four-Wheel Independent Drive/Steering Electric Vehicles. Actuators. 2021; 10(8):184. https://doi.org/10.3390/act10080184
Chicago/Turabian StyleHang, Peng, and Xinbo Chen. 2021. "Towards Autonomous Driving: Review and Perspectives on Configuration and Control of Four-Wheel Independent Drive/Steering Electric Vehicles" Actuators 10, no. 8: 184. https://doi.org/10.3390/act10080184
APA StyleHang, P., & Chen, X. (2021). Towards Autonomous Driving: Review and Perspectives on Configuration and Control of Four-Wheel Independent Drive/Steering Electric Vehicles. Actuators, 10(8), 184. https://doi.org/10.3390/act10080184