


Observer-Based Nonlinear Proportional–Integral–Integral Speed Control for Servo Drive Applications via Order Reduction Technique


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
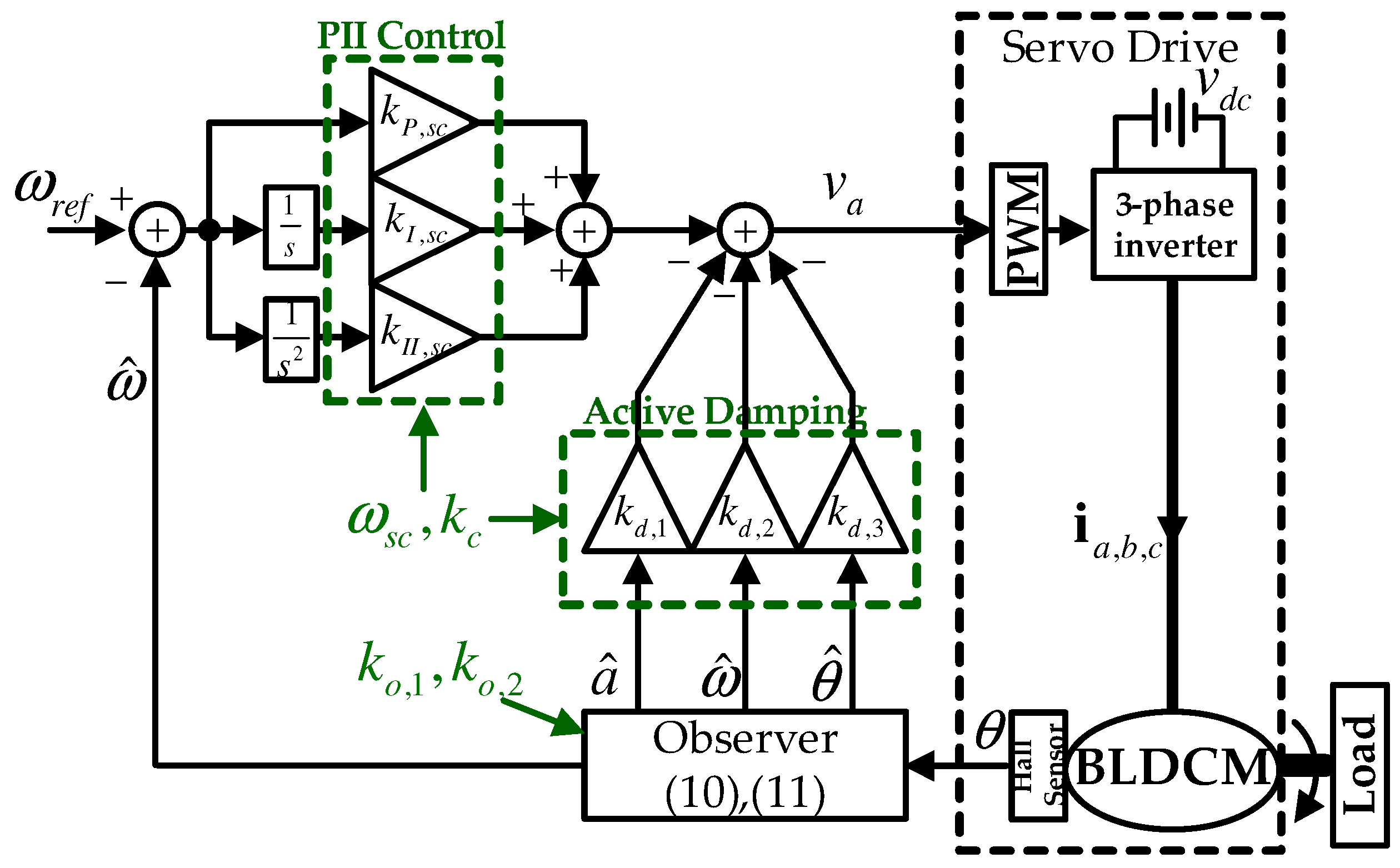
- The proposed third-order observer yields the speed and acceleration along the diagonalized error dynamics through the order reduction property without any system model information, thus specifying the nonlinear structure of the observer gain.
- The proposed controller preserves the simple proportional–integral–integral (PII) structure that involves the observer and active damping as the subsystems for industrial applications, thereby tuning only one of the design parameters, which determines all of the control gains for a given specification.
- The resultant output feedback system guarantees the desired critically damped second-order transfer function, which lowers the peak current level for transient periods.
2. Servo Motor Model
3. Design Purpose
4. Implementation of the Proposed Single-Loop Feedback System
4.1. Observer
4.2. Controller
5. Convergence Analysis Results
5.1. Observer
5.2. Control Loop
6. Experimental Results
6.1. Configuration for Experiments
6.2. Step-Up Reference Tracking Tests
6.3. Constant Reference Regulation Tests
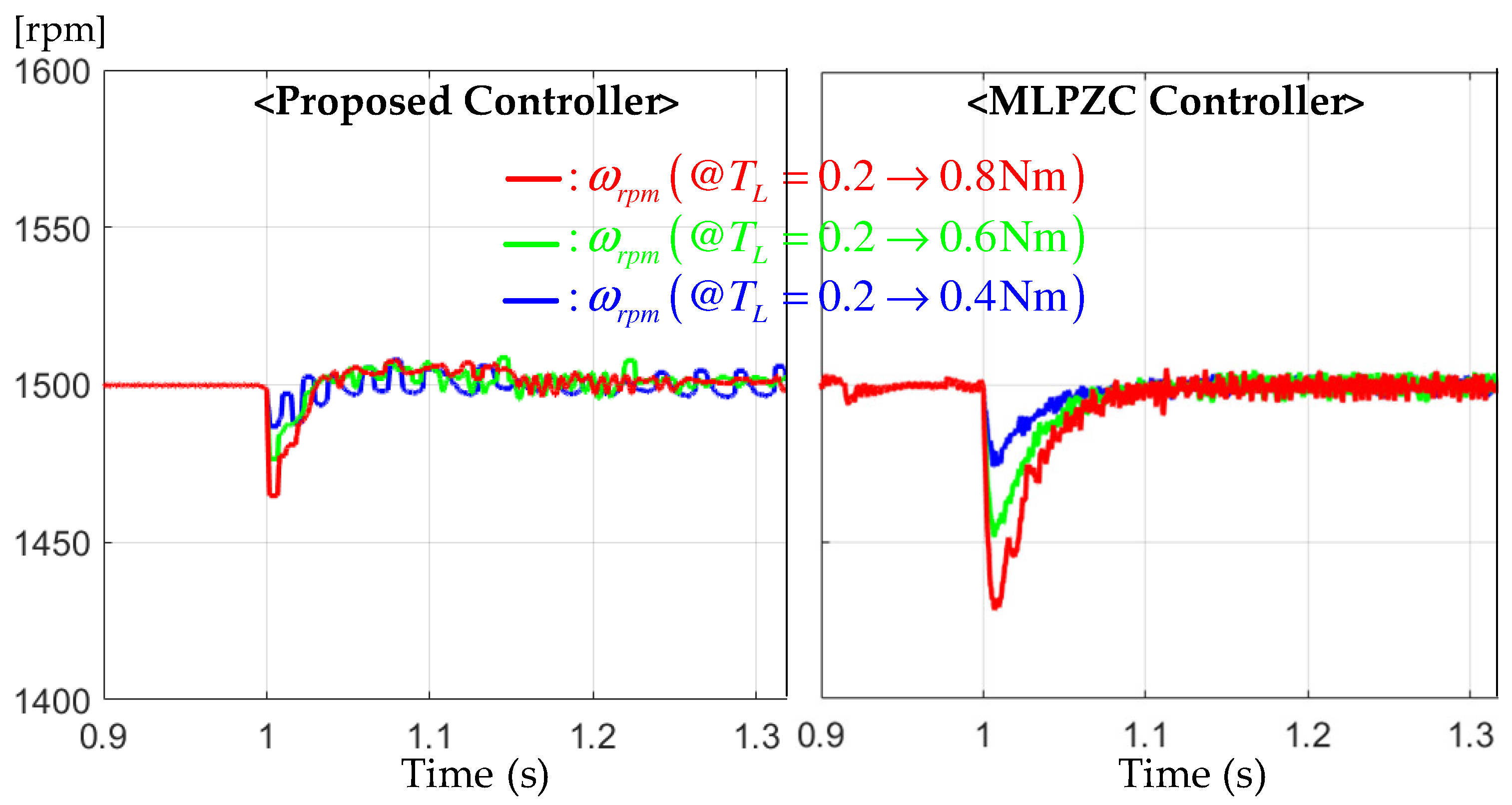
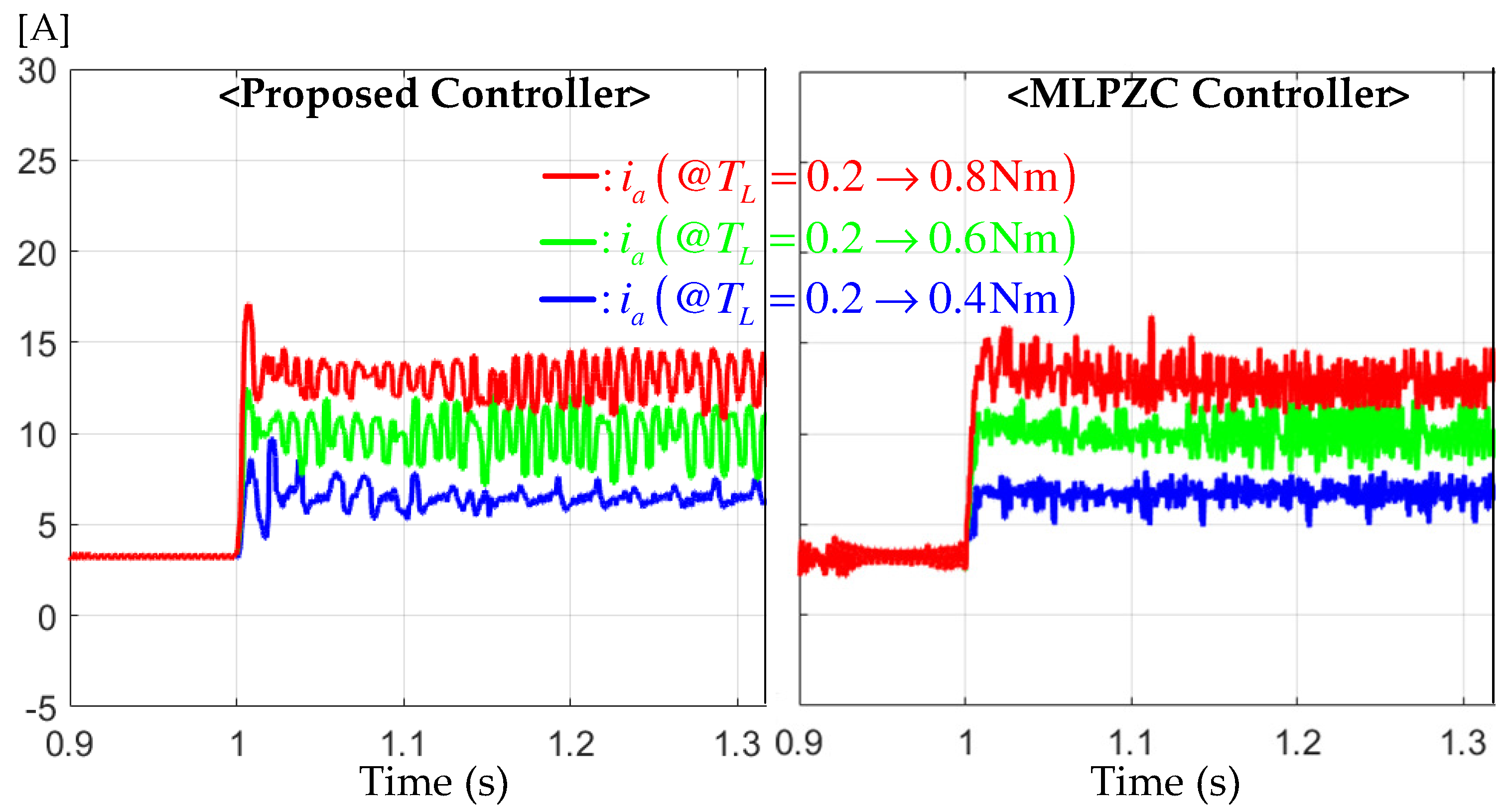
6.4. Performance Assignability Tests
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, M.; Bao, D.; Huang, X. The Design of a Tracking Controller for Flexible Ball Screw Feed System Based on Integral Sliding Mode Control with a Generalized Extended State Observer. Actuators 2023, 12, 387. [Google Scholar] [CrossRef]
- Jayaraman, T.; Thangaraj, M. Standalone and Interconnected Analysis of an Independent Accumulator Pressure Compressibility Hydro-Pneumatic Suspension for the Four-Axle Heavy Truck. Actuators 2023, 12, 347. [Google Scholar] [CrossRef]
- Lin, H.T.; Lee, Y.H. Implementing a Precision Pneumatic Plug Tray Seeder with High Seeding Rates for Brassicaceae Seeds via Real-Time Trajectory Tracking Control. Actuators 2023, 12, 340. [Google Scholar] [CrossRef]
- Hou, T.; Kou, Z.; Wu, J.; Jin, T.; Su, K.; Du, B. Research on Positioning Control Strategy for a Hydraulic Support Pushing System Based on Iterative Learning. Actuators 2023, 12, 306. [Google Scholar] [CrossRef]
- Lim, S.; Kim, S.K.; Kim, K.C. Model-Independent Observer-Based Current Sensorless Speed Servo Systems with Adaptive Feedback Gain. Actuators 2022, 11, 126. [Google Scholar] [CrossRef]
- Agee, J.T.; Bingul, Z.; Kizir, S. Higher-order differential feedback control of a flexible-joint manipulator. J. Vib. Control 2015, 10, 1976–1986. [Google Scholar] [CrossRef]
- Agee, J.T.; Bingul, Z.; Kizir, S. Trajectory and Vibration Control of a Single-Link Flexible-Joint Manipulator Using a Distributed Higher-Order Differential Feedback Controller. ASME J. Dyn. Syst. Meas. Control 2017, 139, 081006. [Google Scholar] [CrossRef]
- Kim, S.K.; Ahn, C.K. Active-damping Speed Tracking Technique for Permanent Magnet Synchronous Motors with Transient Performance Boosting Mechanism. IEEE Trans. Ind. Inform. 2021, 18, 2171–2179. [Google Scholar] [CrossRef]
- Andeescu, G.D.; Pitic, C.I.; Blaabjerg, F.; Boldea, I. Combined flux observer with signal injection enhancement for wide speed range sensorless direct torque control of IPMSM drives. IEEE Trans. Energy Convers. 2008, 23, 393–402. [Google Scholar] [CrossRef]
- Tang, L.; Zhong, L.; Rahman, M.; Hu, Y. A novel direct torque control for interior permanent-magnet synchronous machine drive with low ripple in torque and flux - a speed-senseroless approach. IEEE Trans. Ind. Appl. 2003, 39, 1748–1756. [Google Scholar] [CrossRef]
- Olalla, C.; Leyva, R.; Queinnec, I.; Maksimovic, D. Robust Gain-Scheduled Control of Switched-Mode DC-DC Converters. IEEE Trans. Power Electron. 2012, 27, 3006–3019. [Google Scholar] [CrossRef]
- Sul, S.K. Control of Electric Machine Drive Systems; Wiley: Hoboken, NJ, USA, 2011; Volume 88. [Google Scholar]
- Xu, L.; Li, Y. Distributed Adaptive Consensus Tracking Control for Second-Order Nonlinear Heterogeneous Multi-Agent Systems with Input Quantization. Machines 2023, 11, 524. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, M.; Fan, C.; Li, F. A Finite-Time Trajectory-Tracking Method for State-Constrained Flexible Manipulators Based on Improved Back-Stepping Control. Actuators 2022, 11, 139. [Google Scholar] [CrossRef]
- Lin, C.Y.; Yao, W.S. Analysis and Design Multiple Layer Adaptive Kalman Filter Applied to Electro-Optical Infrared Payload Vision System. Electronics 2022, 11, 677. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, Y.; Li, X.; Luo, H.; Yin, S.; Kaynak, O. Remaining Useful Life Prediction of Lithium-Ion Battery With Adaptive Noise Estimation and Capacity Regeneration Detection. IEEE/ASME Trans. Mechatron. 2023, 28, 632–643. [Google Scholar] [CrossRef]
- Kim, S.K. Robust adaptive speed regulator with self-tuning law for surfaced-mounted permanent magnet synchronous motor. Control Eng. Pract. 2017, 61, 55–71. [Google Scholar] [CrossRef]
- El-Sousy, F.F.M.; Abuhasel, K.A. Nonlinear Robust Optimal Control via Adaptive Dynamic Programming of Permanent-Magnet Linear Synchronous Motor Drive for Uncertain Two-Axis Motion Control System. IEEE Trans. Ind. Appl. 2020, 56, 1940–1952. [Google Scholar] [CrossRef]
- Errouissi, R.; Ouhrouche, M.; Chen, W.H.; Trzynadlowski, A.M. Robust Cascaded Nonlinear Predictive Control of a Permanent Magnet Synchronous Motor With Antiwindup Compensator. IEEE Trans. Ind. Electron. 2012, 59, 3078–3088. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Ma, D. Time-varying input delay compensation for nonlinear systems with additive disturbance: An output feedback approach. Int. J. Robust Nonlinear Control 2017, 28, 31–52. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J. Extended-State-Observer-Based Adaptive Control of Electrohydraulic Servomechanisms Without Velocity Measurement. IEEE/ASME Trans. Mechatron. 2020, 25, 1151–1161. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Wang, Y.; Yang, X.; Chen, J. Output feedback backstepping control of hydraulic actuators with valve dynamics compensation. Mech. Syst. Signal Process. 2021, 158, 107769. [Google Scholar] [CrossRef]
- Son, Y.I.; Kim, I.H.; Choi, D.S.; Shim, H. Robust Cascade Control of Electric Motor Drives Using Dual Reduced-Order PI Observer. IEEE Trans. Ind. Electron. 2015, 62, 3672–3682. [Google Scholar] [CrossRef]
- Corradini, M.L.; Ippoliti, G.; Longhi, S.; Orlando, G. A Quasi-Sliding Mode Approach for Robust Control and Speed Estimation of PM Synchronous Motors. IEEE Trans. Ind. Electron. 2012, 59, 1096–1104. [Google Scholar] [CrossRef]
- Geyer, T.; Papafotieu, G.; Morari, M. Model predictive direct torque control-part I: Concept, algorithm and analysis. IEEE Trans. Ind. Electron. 2009, 56, 1894–1905. [Google Scholar] [CrossRef]
- Ahmed, A.A.; Koh, B.K.; Lee, Y.I. A Comparison of Finite Control Set and Continuous Control Set Model Predictive Control Schemes for Speed Control of Induction Motors. IEEE Trans. Ind. Inform. 2018, 14, 1334–1346. [Google Scholar] [CrossRef]
- Tao, T.; Zhao, W.; Du, Y.; Cheng, Y.; Zhu, J. Simplified Fault-Tolerant Model Predictive Control for a Five-Phase Permanent-Magnet Motor With Reduced Computation Burden. IEEE Trans. Power Electron. 2020, 35, 3850–3858. [Google Scholar] [CrossRef]
- Kim, S.K.; Kim, Y.; Ahn, C.K. Energy-Shaping Speed Controller With Time-Varying Damping Injection for Permanent-Magnet Synchronous Motors. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 381–385. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.; Ye, H.; Lim, S.; Kim, S.-K. Observer-Based Nonlinear Proportional–Integral–Integral Speed Control for Servo Drive Applications via Order Reduction Technique. Actuators 2024, 13, 2. https://doi.org/10.3390/act13010002
Kim Y, Ye H, Lim S, Kim S-K. Observer-Based Nonlinear Proportional–Integral–Integral Speed Control for Servo Drive Applications via Order Reduction Technique. Actuators. 2024; 13(1):2. https://doi.org/10.3390/act13010002
Chicago/Turabian StyleKim, Yonghun, Hyunho Ye, Sun Lim, and Seok-Kyoon Kim. 2024. "Observer-Based Nonlinear Proportional–Integral–Integral Speed Control for Servo Drive Applications via Order Reduction Technique" Actuators 13, no. 1: 2. https://doi.org/10.3390/act13010002
APA StyleKim, Y., Ye, H., Lim, S., & Kim, S.-K. (2024). Observer-Based Nonlinear Proportional–Integral–Integral Speed Control for Servo Drive Applications via Order Reduction Technique. Actuators, 13(1), 2. https://doi.org/10.3390/act13010002