
Indirect Adaptive Control Using Neural Network and Discrete Extended Kalman Filter for Wheeled Mobile Robot



Abstract
1. Introduction
1.1. Motivations
1.2. State of the Art
1.3. Contributions
- We successfully applied the discrete extended Kalman filter (DEKF) for neural network (control or identification) weight adaptation and state estimation (localization).
- We designed an adaptive control strategy based on a neural network for mobile robot trajectory tracking.
- Simulations were conducted to verify the proposed adaptive control strategy’s performance.
1.4. Structure Overview
2. Kinematics Model
3. Indirect Adaptive Control
3.1. PID Control Technique
3.2. PID Gain Adaptation
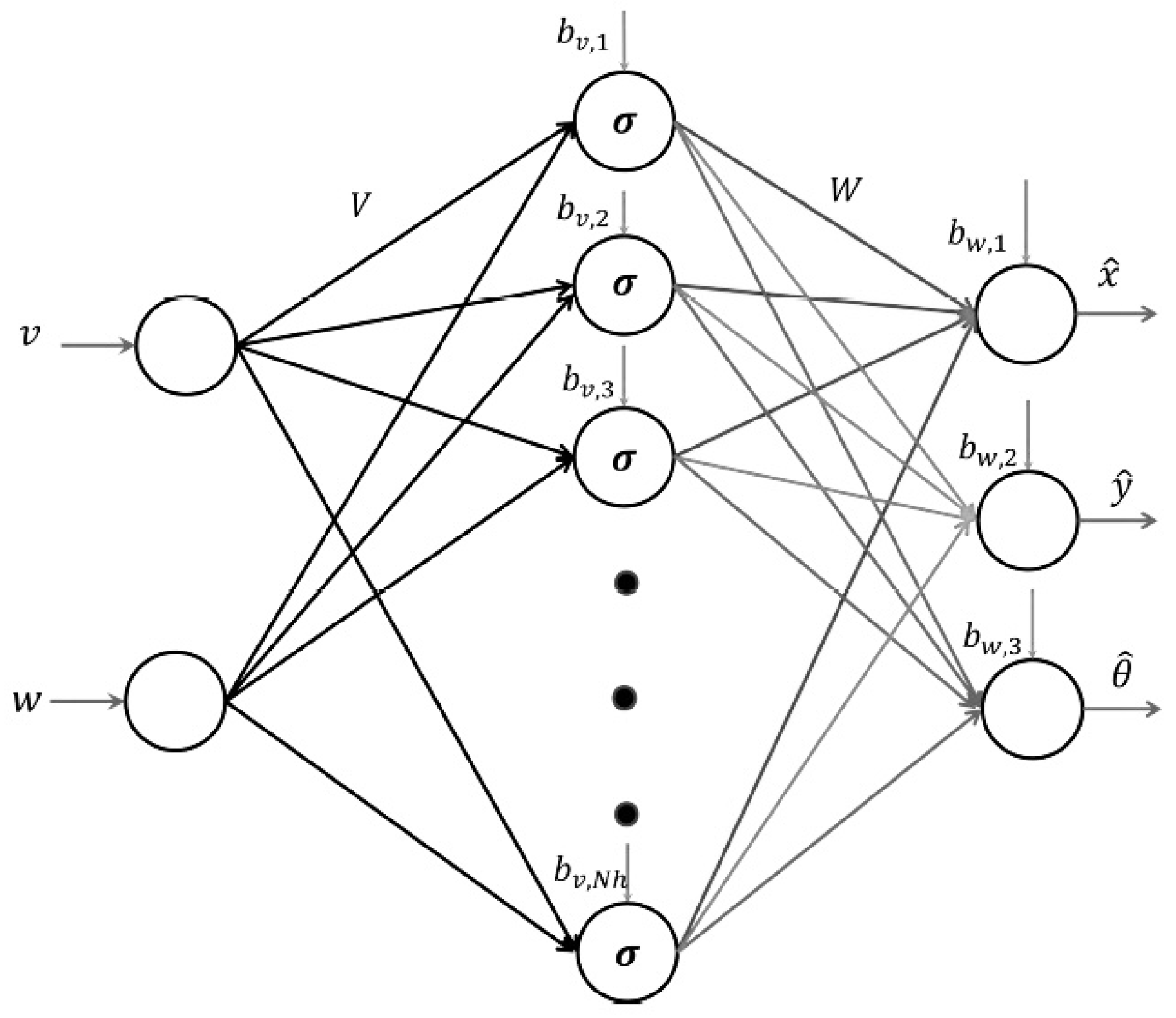
3.3. Jacobian Calculation Using the NN Model
3.4. Discrete Extended Kalman Filter for NN Adaptation
- State estimate propagation:
- The updated equations of the Kalman filter (or correction) are given as follows:
3.4.1. Stochastic Stability Analysis
3.4.2. Boundedness of the Estimation Error
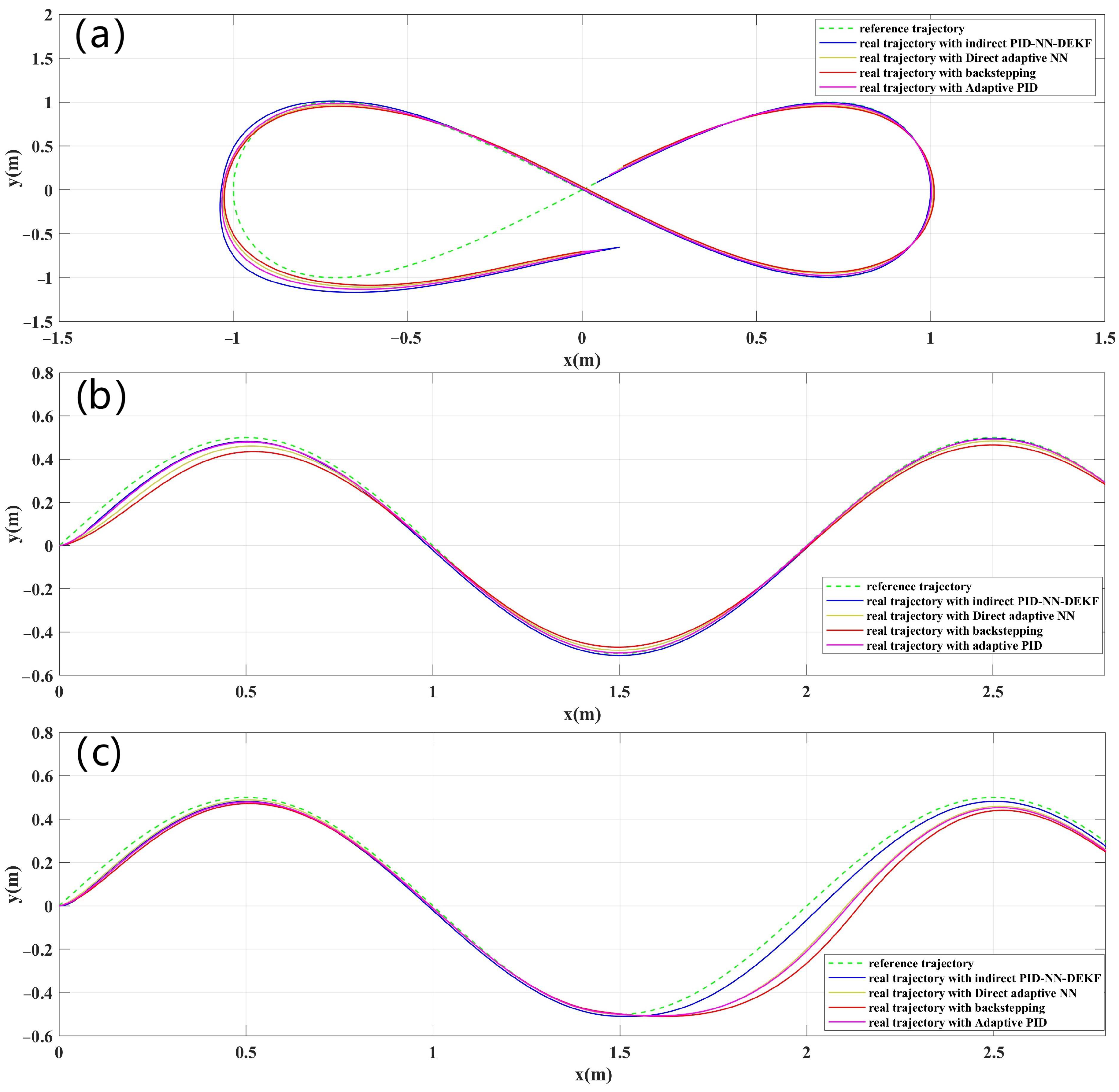
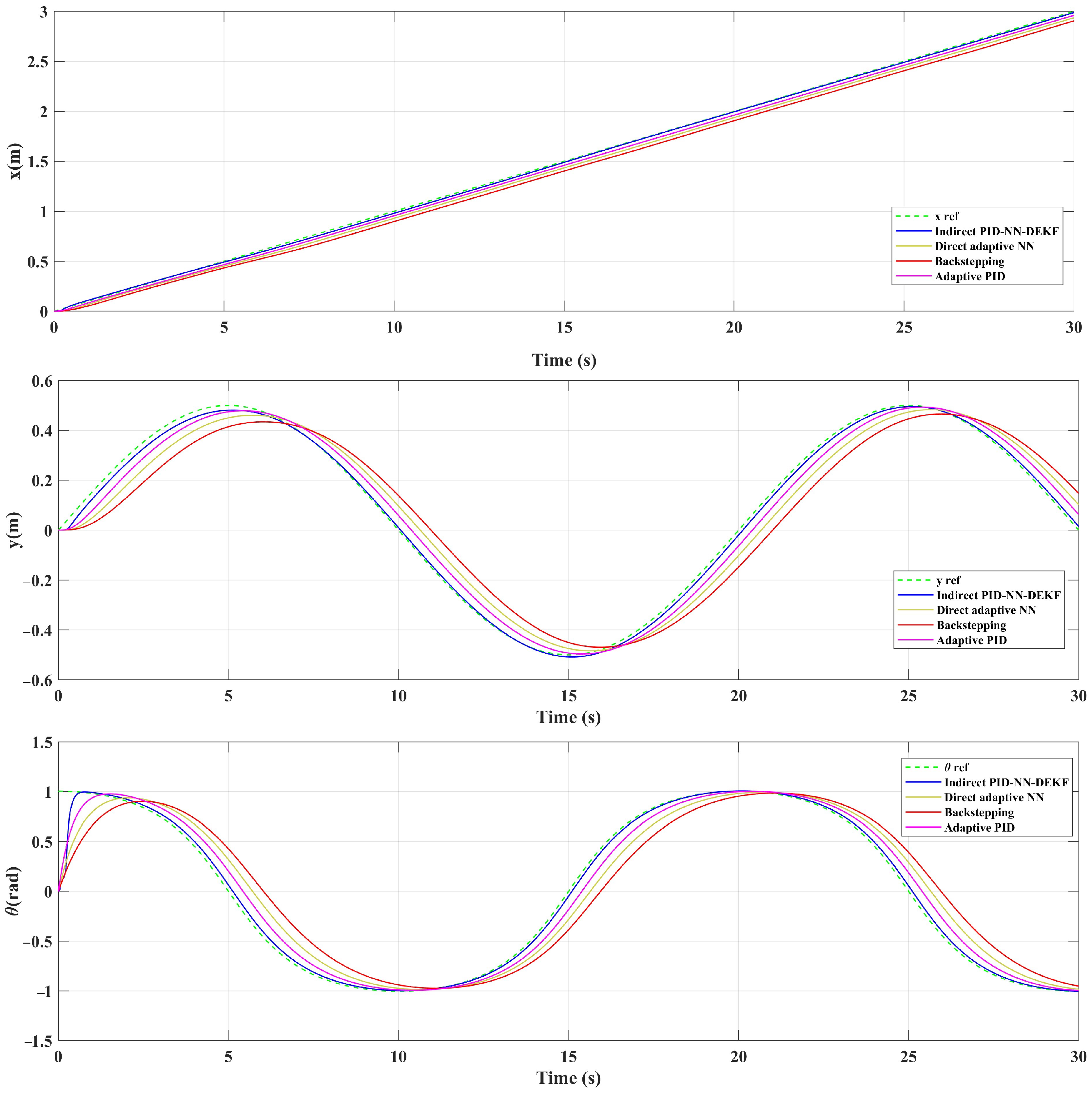
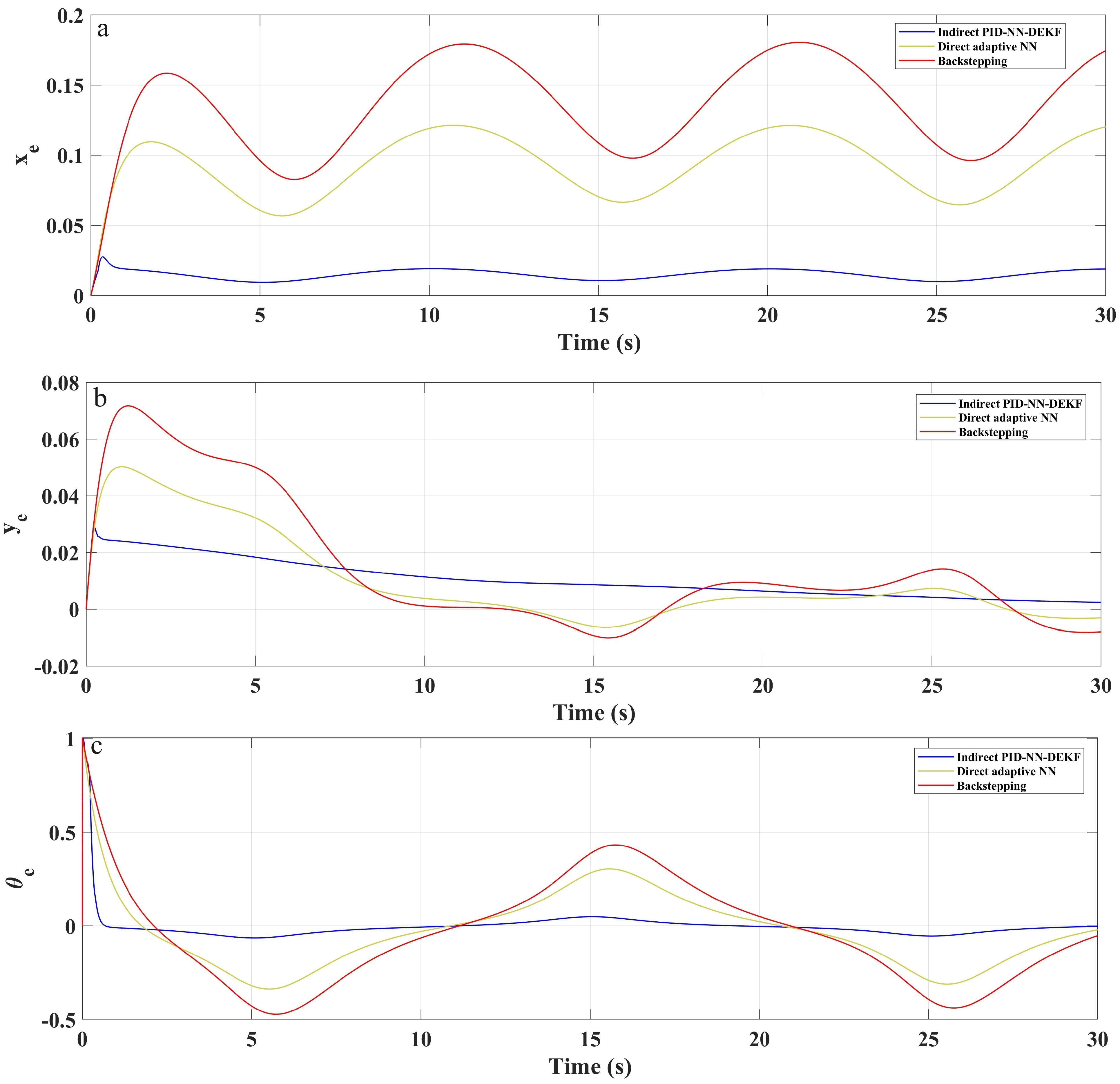
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DEKF | Discrete Extended Kalman Filter |
| WMR | Wheeled Mobile Robot |
| DA-NN | Direct Adaptive Neural Network |
| BSC | Backstepping Control |
| RMSE | Root Mean Squared Error |
| IAPID-NN-DEKF | Indirect Adaptive PID using an NN and DEKF |
| NN | Neural Network |
| DEKF | Discrete Extended Kalman Filter |
| SGD | Stochastic Gradient Descent |
| GA | Gradient Approximation |
| SPSA | Perturbation Stochastic Approximation |
| x | Robot’s Position Coordinate in the X-axis |
| y | Robot’s Position Coordinate in the Y-axis |
| Robot’s Orientation | |
| Tracking Error in the X-axis | |
| Tracking Error in the Y-axis | |
| Tracking Error in Orientation |
References
- Shafaei, S.M.; Mousazadeh, H. Development of a mobile robot for safe mechanical evacuation of hazardous bulk materials in industrial confined spaces. J. Field Robot. 2022, 39, 218–231. [Google Scholar] [CrossRef]
- Luo, F.; Zhou, Q.; Fuentes, J.; Ding, W.; Gu, C. A Soar-Based Space Exploration Algorithm for Mobile Robots. Entropy 2022, 24, 426. [Google Scholar] [CrossRef]
- Kot, T.; Novák, P. Application of virtual reality in teleoperation of the military mobile robotic system TAROS. Int. J. Adv. Robot. Syst. 2022, 15, 1729881417751545. [Google Scholar] [CrossRef]
- Bhondve, T.B.; Satyanarayan, R.; Mukhedkar, M. Mobile rescue robot for human body detection in rescue operation of disaster. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014, 3, 9876–9882. [Google Scholar]
- West, A.; Tsitsimpelis, I.; Licata, M.; Jazbec, A.; Snoj, L.; Joyce, M.J.; Lennox, B. Use of Gaussian process regression for radiation mapping of a nuclear reactor with a mobile robot. Sci. Rep. 2021, 11, 13975. [Google Scholar] [CrossRef]
- Matraji, I.; Al-Durra, A.; Haryono, A.; Al-Wahedi, K.; Abou-Khousa, M. Trajectory tracking control of skid-steered mobile robot based on adaptive second order sliding mode control. Control Eng. Pract. 2018, 72, 167–176. [Google Scholar] [CrossRef]
- Saradagi, A.; Muralidharan, V.; Krishnan, V.; Menta, S.; Mahindrakar, A.D. Formation control and trajectory tracking of nonholonomic mobile robots. IEEE Trans. Control Syst. Technol. 2017, 26, 2250–2258. [Google Scholar] [CrossRef]
- Hao, Y.; Wang, J.; Chepinskiy, S.A.; Krasnov, A.J.; Liu, S. Backstepping based trajectory tracking control for a four-wheel mobile robot with differential-drive steering. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 4918–4923. [Google Scholar]
- Rubagotti, M.; Della Vedova, M.L.; Ferrara, A. Time-optimal sliding-mode control of a mobile robot in a dynamic environment. IET Control Theory Appl. 2011, 5, 1916–1924. [Google Scholar] [CrossRef]
- Bencherif, A.; Chouireb, F. A recurrent TSK interval type-2 fuzzy neural networks control with online structure and parameter learning for mobile robot trajectory tracking. Appl. Intell. 2019, 49, 3881–3893. [Google Scholar] [CrossRef]
- Talaat, F.M.; Ibrahim, A.; El-Kenawy, E.S.M.; Abdelhamid, A.A.; Alhussan, A.A.; Khafaga, D.S.; Salem, D.A. Route Planning for Autonomous Mobile Robots Using a Reinforcement Learning Algorithm. Actuators 2022, 12, 12. [Google Scholar] [CrossRef]
- Zhao, W.; Gu, L. Adaptive PID Controller for Active Suspension Using Radial Basis Function Neural Networks. Actuators 2023, 12, 437. [Google Scholar] [CrossRef]
- Sun, Y.; Liang, X.; Wan, Y.; Zhao, W.; Gu, L. Tracking Control of Robot Manipulator with Friction Compensation Using Time-Delay Control and an Adaptive Fuzzy Logic System. Actuators 2023, 12, 184. [Google Scholar] [CrossRef]
- Zhao, P.; Chen, J.; Song, Y.; Tao, X.; Xu, T.; Mei, T. Design of a control system for an autonomous vehicle based on adaptive-pid. Int. J. Adv. Robot. Syst. 2012, 9, 44. [Google Scholar] [CrossRef]
- Ouyang, P.R.; Acob, J.; Pano, V. PD with sliding mode control for trajectory tracking of robotic system. Robot. Comput.-Integr. Manuf. 2014, 30, 189–200. [Google Scholar] [CrossRef]
- Liu, W.; Wang, X.; Liang, S. Trajectory tracking control for wheeled mobile robots based on a cascaded system control method. In Proceedings of the IECON 2020 the 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 396–401. [Google Scholar]
- Wang, S.; Yin, X.; Li, P.; Zhang, M.; Wang, X. Trajectory tracking control for mobile robots using reinforcement learning and PID. Iran. J. Sci. Technol. Trans. Electr. Eng. 2020, 44, 1059–1068. [Google Scholar] [CrossRef]
- Mok, R.; Ahmad, M.A. Fast and optimal tuning of fractional order PID controller for AVR system based on memorizable-smoothed functional algorithm. Eng. Sci. Technol. Int. J. 2022, 35, 101264. [Google Scholar] [CrossRef]
- Kong, I.; Qian, I.; Wang, I. SPSA-based PID parameters optimization for a dual-tank liquid-level control system. In Proceedings of the 2016 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Bali, Indonesia, 4–7 December 2016; pp. 1463–1467. [Google Scholar]
- Wang, Z.; Zhang, J. Incremental PID Controller-Based Learning Rate Scheduler for Stochastic Gradient Descent. IEEE Trans. Neural Netw. Learn. Syst. 2022; Early Access. [Google Scholar] [CrossRef]
- Cui, M.; Liu, W.; Liu, H.; Jiang, H.; Wang, Z. Extended state observer-based adaptive sliding mode control of differential-driving mobile robot with uncertainties. Nonlinear Dyn. 2016, 83, 667–683. [Google Scholar] [CrossRef]
- Riccio, V.; Jahangirova, G.; Stocco, A.; Humbatova, N.; Weiss, M.; Tonella, P. Testing machine learning based systems: A systematic mapping. Empir. Softw. Eng. 2020, 25, 5193–5254. [Google Scholar] [CrossRef]
- Hassan, N.; Saleem, A. Neural network-based adaptive controller for trajectory tracking of wheeled mobile robots. IEEE Access 2022, 10, 13582–13597. [Google Scholar] [CrossRef]
- Liu, Z.; Peng, K.; Han, L.; Guan, S. Modeling and control of robotic manipulators based on artificial neural networks: A review. Iran. J. Sci. Technol. Trans. Mech. Eng. 2023, 47, 1307–1347. [Google Scholar] [CrossRef]
- Nguyen, T.; Nguyentien, K.; Do T, P.T. Neural network-based adaptive sliding mode control method for tracking of a nonholonomic wheeled mobile robot with unknown wheel slips, model uncertainties, and unknown bounded external disturbances. Acta Polytech. Hung. 2018, 15, 103–123. [Google Scholar]
- Abdelwahab, M.; Parque, V.; Elbab, A.M.F.; Abouelsoud, A.A.; Sugano, S. Trajectory tracking of wheeled mobile robots using z-number based fuzzy logic. IEEE Access 2020, 8, 18426–18441. [Google Scholar] [CrossRef]
- Novák, V.; Lehmke, S. Logical structure of fuzzy IF-THEN rules. Fuzzy Sets Syst. 2006, 157, 2003–2029. [Google Scholar] [CrossRef]
- Hsu, C.F.; Chen, B.R.; Lin, Z.L. Implementation and Control of a Wheeled Bipedal Robot Using a Fuzzy Logic Approach. Actuators 2022, 11, 357. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Marini, F.; Walczak, B. Particle swarm optimization (PSO). A tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Barambones, O.; Bencherif, A.; Rahmani, A. A New MPPT-Based Extended Grey Wolf Optimizer for Stand-Alone PV System: A Performance Evaluation versus Four Smart MPPT Techniques in Diverse Scenarios. Inventions 2023, 8, 142. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Barambones, O.; Cortajarena, J.A.; Alkorta, P.; Bencherif, A. PEMFC Current Control Using a Novel Compound Controller Enhanced by the Black Widow Algorithm: A Comprehensive Simulation Study. Sustainability 2023, 15, 13823. [Google Scholar] [CrossRef]
- Yang, X.S.; He, X. Bat algorithm: Literature review and applications. J. Univ. Babylon Eng. Sci. 2013, 26, 292–306. [Google Scholar] [CrossRef]
- Castillo, O.; Neyoy, H.; Soria, J.; Melin, P.; Valdez, F. A new approach for dynamic fuzzy logic parameter tuning in ant colony optimization and its application in fuzzy control of a mobile robot. Appl. Soft Comput. 2015, 128, 150–159. [Google Scholar] [CrossRef]
- Saleh, A.L.; Hussain, M.A.; Klim, S.M. Optimal trajectory tracking control for a wheeled mobile robot using fractional order PID controller. Int. J. Bio-Inspired Comput. 2018, 5, 141–149. [Google Scholar] [CrossRef]
- Morin, P.; Samson, C. Motion control of wheeled mobile robots. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; Volume 1, pp. 799–826. [Google Scholar]
- Zhao, Y.; BeMent, S.L. Kinematics, dynamics and control of wheeled mobile robots. In Proceedings of the 1992 IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; pp. 91–92. [Google Scholar]
- Peng, Y.; Zhang, P.; Fang, Z.; Zheng, S.; Guo, Z. Trajectory tracking control of the wheeled mobile robot based on the curve tracking algorithm. J. Phys. Conf. Ser. 2023, 2419, 012106. [Google Scholar] [CrossRef]
- Li, Z.; Deng, J.; Lu, R.; Xu, Y.; Bai, J.; Su, C.Y. Trajectory-tracking control of mobile robot systems incorporating neural-dynamic optimized model predictive approach. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 740–749. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Barambones, O.; Bencherif, A. A Novel Adaptive PID Controller Design for a PEM Fuel Cell Using Stochastic Gradient Descent with Momentum Enhanced by Whale Optimizer. Electronics 2022, 11, 2610. [Google Scholar] [CrossRef]
- Borase, R.P.; Maghade, D.K.; Sondkar, S.Y.; Pawar, S.N. A review of PID control, tuning methods and applications. Int. J. Dyn. Control 2021, 9, 818–827. [Google Scholar] [CrossRef]
- He, N.; Yang, Z.; Fan, X.; Wu, J.; Sui, Y.; Zhang, Q. A Self-Adaptive Double Q-Backstepping Trajectory Tracking Control Approach Based on Reinforcement Learning for Mobile Robots. Actuators 2023, 12, 326. [Google Scholar] [CrossRef]
- Yiğit, S.; Sezgin, A. Design of a Kinematic Model Based Backstepping PID and SMC for Mobile Robots. Sak. Univ. J. Sci. (SAUJS)/Sak. Üniv. Bilim. Enst. Derg. 2023, 27, 120. [Google Scholar]
- Bengio, Y.; Goodfellow, I.; Courville, A. Deep learning. In Genetic Programming and Evolvable Machines; MIT Press: Cambridge, MA, USA, 2017; Volume 1. [Google Scholar]
- Wu, H.; Zhang, X.; Song, L.; Zhang, Y.; Wang, C.; Zhao, X.; Gu, L. Parallel Network-Based Sliding Mode Tracking Control for Robotic Manipulators with Uncertain Dynamics. Actuators 2023, 12, 187. [Google Scholar] [CrossRef]
- Chu, M.T.; Zhang, Z. An Innate Moving Frame on Parametric Surfaces: The Dynamics of Principal Singular Curves. Mathematics 2023, 11, 3306. [Google Scholar] [CrossRef]
- Asadi, A.R.; Abbe, E. Chaining meets chain rule: Multilevel entropic regularization and training of neural networks. J. Mach. Learn. Res. 2020, 21, 5453–5484. [Google Scholar]
- I. Breesam, W.; L. Saleh, A.; A. Mohamad, K.; J. Yaqoob, S.; A. Qasim, M.; T. Alwan, N.; Nayyar, A.; Al-Amri, J.F.; Abouhawwash, M. Speed control of a multi-motor system based on fuzzy neural model reference method. Actuators 2022, 11, 123. [Google Scholar] [CrossRef]
- Kulikova, M.V.; Kulikov, G.Y. Data-driven parameter estimation in stochastic dynamic neural fields by state-space approach and continuous-discrete extended Kalman filtering. Digit. Signal Process. 2023, 136, 104010. [Google Scholar] [CrossRef]
- Lv, C.; Lan, Z.; Chang, J.; Yu, D. Extended-Kalman-filter-based equilibrium manifold expansion observer for ramjet nonlinear control. Aerosp. Sci. Technol. 2023, 138, 108359. [Google Scholar] [CrossRef]
- Linnainmaa, S. Taylor expansion of the accumulated rounding error. BIT Numer. Math. 1976, 16, 146–160. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategy | RMSE of x | RMSE of y | RMSE of |
|---|---|---|---|
| Indirect PID-NN-DEKF | 0.078769 | 0.12086 | 0.1672 |
| Backstepping | 0.1139 | 0.2066 | 0.3409 |
| Adaptive NN | 0.1041 | 0.1832 | 0.2973 |
| Adaptive PID | 0.0917 | 0.1523 | 0.2375 |
| Control Strategy | RMSE of x | RMSE of y | RMSE of |
|---|---|---|---|
| Indirect PID-NN-DEKF | 0.01233 | 0.015138 | 0.088707 |
| Backstepping | 0.0475 | 0.0563 | 0.1586 |
| Adaptive NN | 0.0319 | 0.0380 | 0.1134 |
| Adaptive PID | 0.0384 | 0.0453 | 0.1326 |
| Control Strategy | RMSE of x | RMSE of y | RMSE of |
|---|---|---|---|
| Indirect PID-NN-DEKF | 0.021495 | 0.016504 | 0.090142 |
| Backstepping | 0.0908 | 0.1076 | 0.1794 |
| Adaptive NN | 0.0617 | 0.0739 | 0.12512 |
| Adaptive PID | 0.0583 | 0.0415 | 0.1252 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silaa, M.Y.; Bencherif, A.; Barambones, O. Indirect Adaptive Control Using Neural Network and Discrete Extended Kalman Filter for Wheeled Mobile Robot. Actuators 2024, 13, 51. https://doi.org/10.3390/act13020051
Silaa MY, Bencherif A, Barambones O. Indirect Adaptive Control Using Neural Network and Discrete Extended Kalman Filter for Wheeled Mobile Robot. Actuators. 2024; 13(2):51. https://doi.org/10.3390/act13020051
Chicago/Turabian StyleSilaa, Mohammed Yousri, Aissa Bencherif, and Oscar Barambones. 2024. "Indirect Adaptive Control Using Neural Network and Discrete Extended Kalman Filter for Wheeled Mobile Robot" Actuators 13, no. 2: 51. https://doi.org/10.3390/act13020051
APA StyleSilaa, M. Y., Bencherif, A., & Barambones, O. (2024). Indirect Adaptive Control Using Neural Network and Discrete Extended Kalman Filter for Wheeled Mobile Robot. Actuators, 13(2), 51. https://doi.org/10.3390/act13020051