
Topology Optimization of Shape Memory Alloy Actuators for Prescribed Two-Way Transforming Shapes
Abstract
:1. Introduction
2. Topology Optimization Method for Two-Way Shape-Morphing SMA Actuators
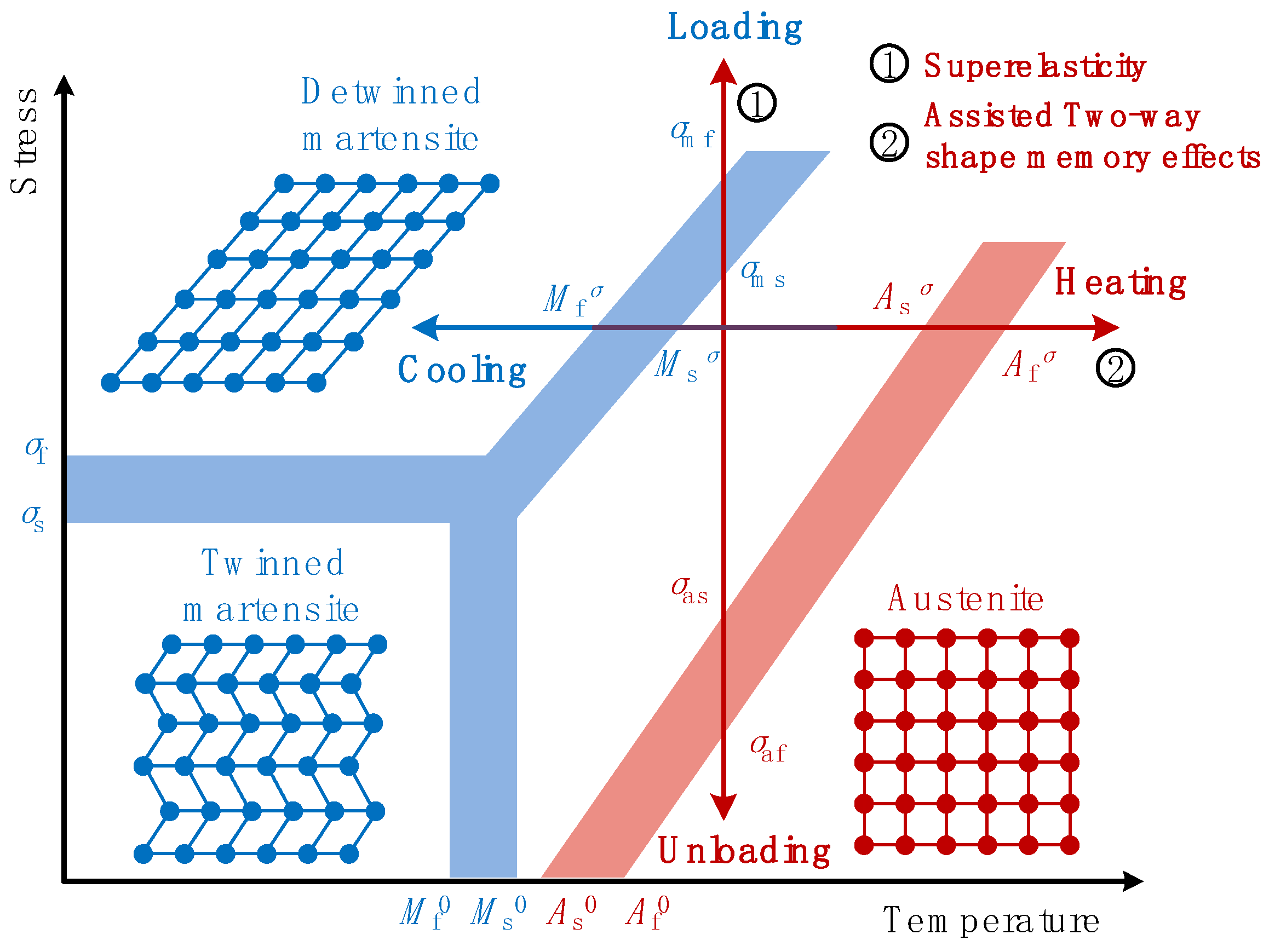
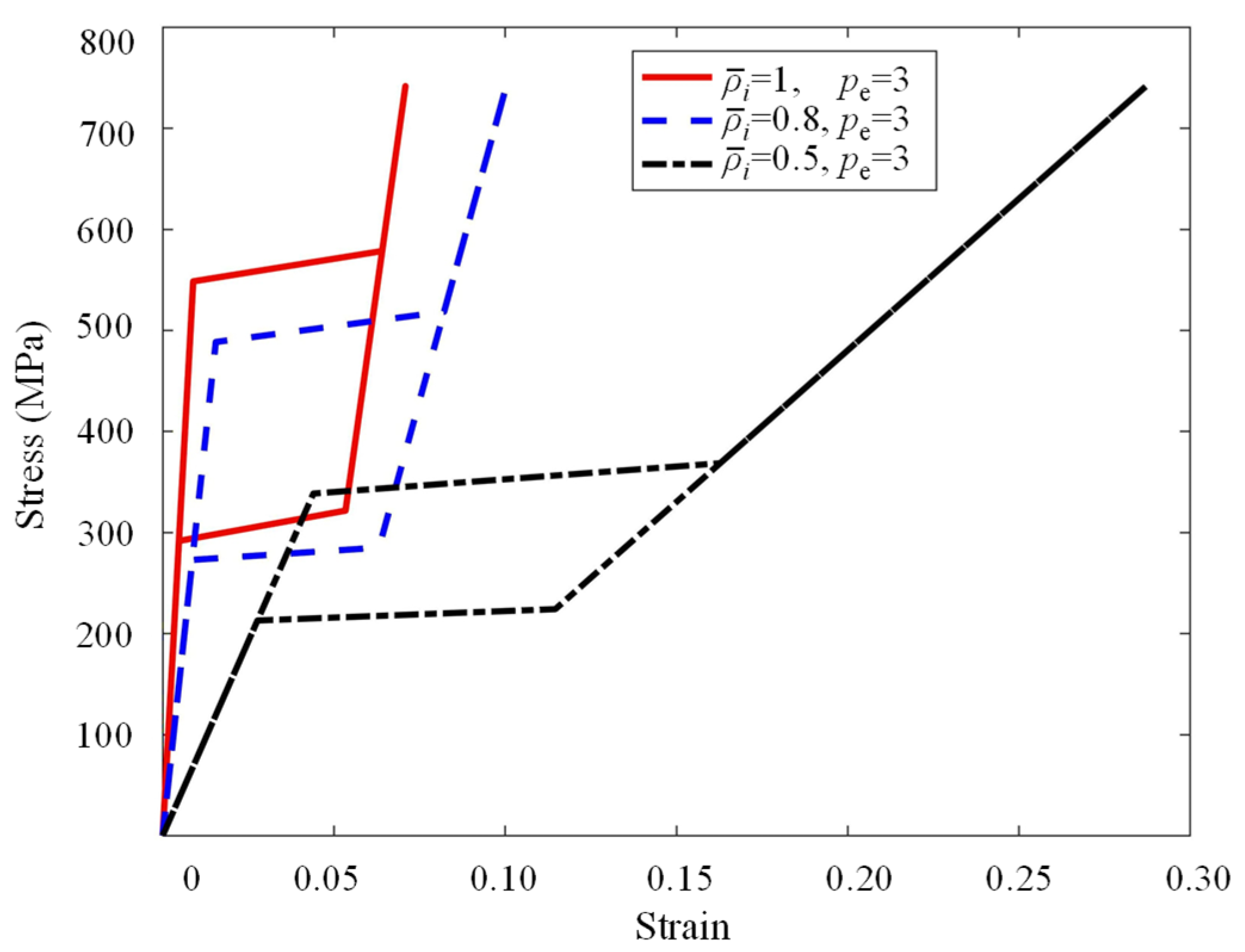
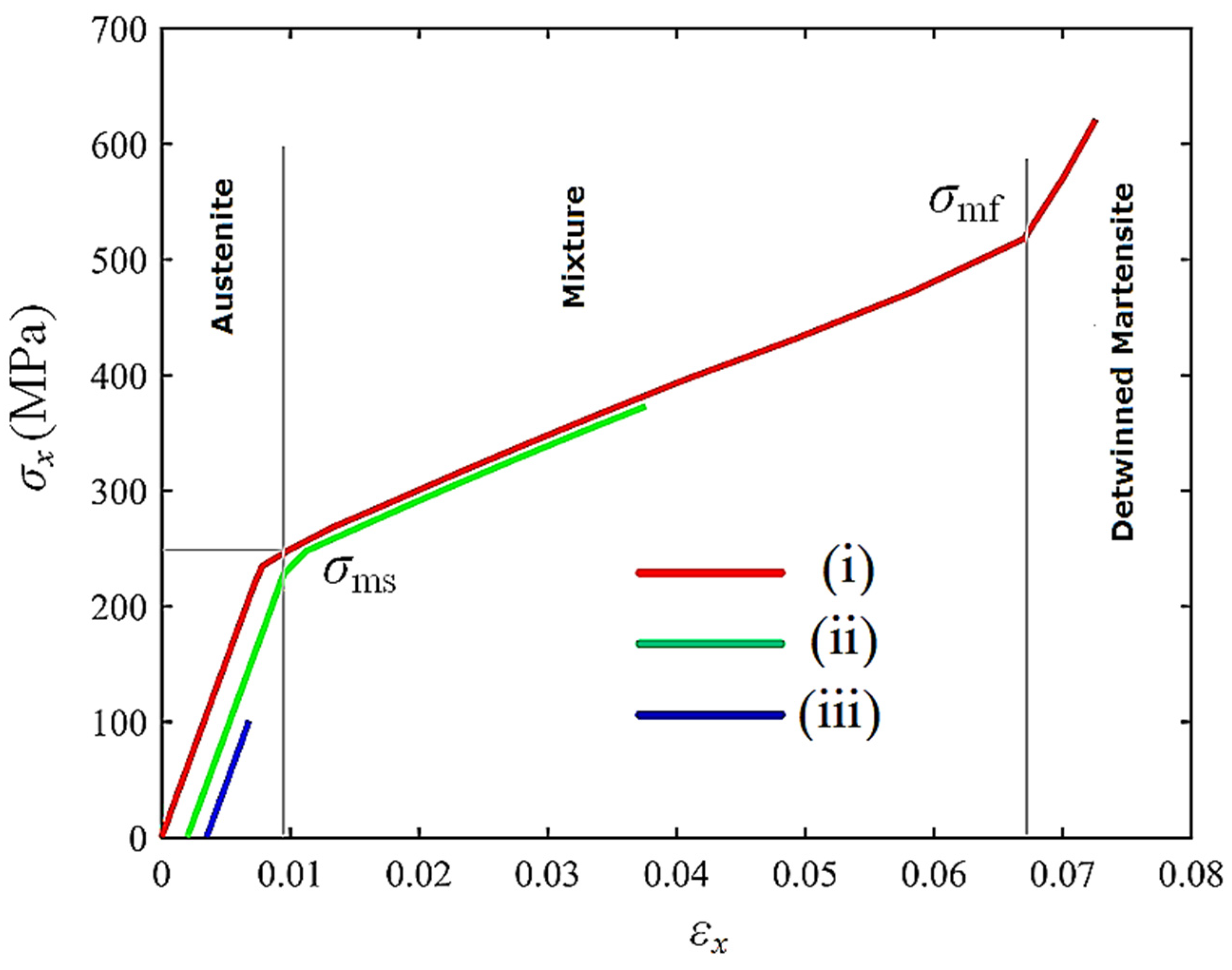
2.1. Material Constitutive Model for Shape Memory Alloys
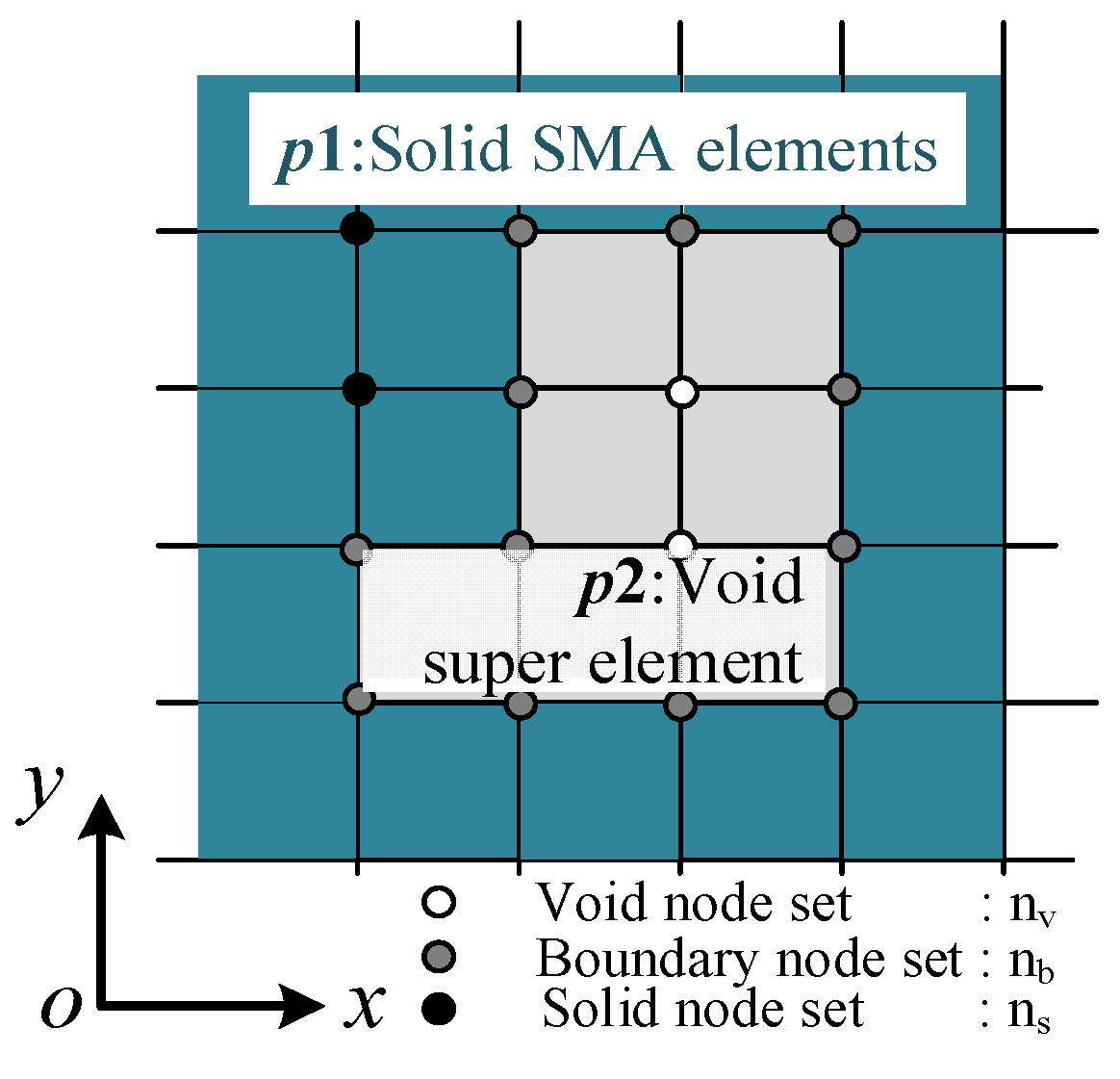
2.2. Material Interpolation Model for SMA
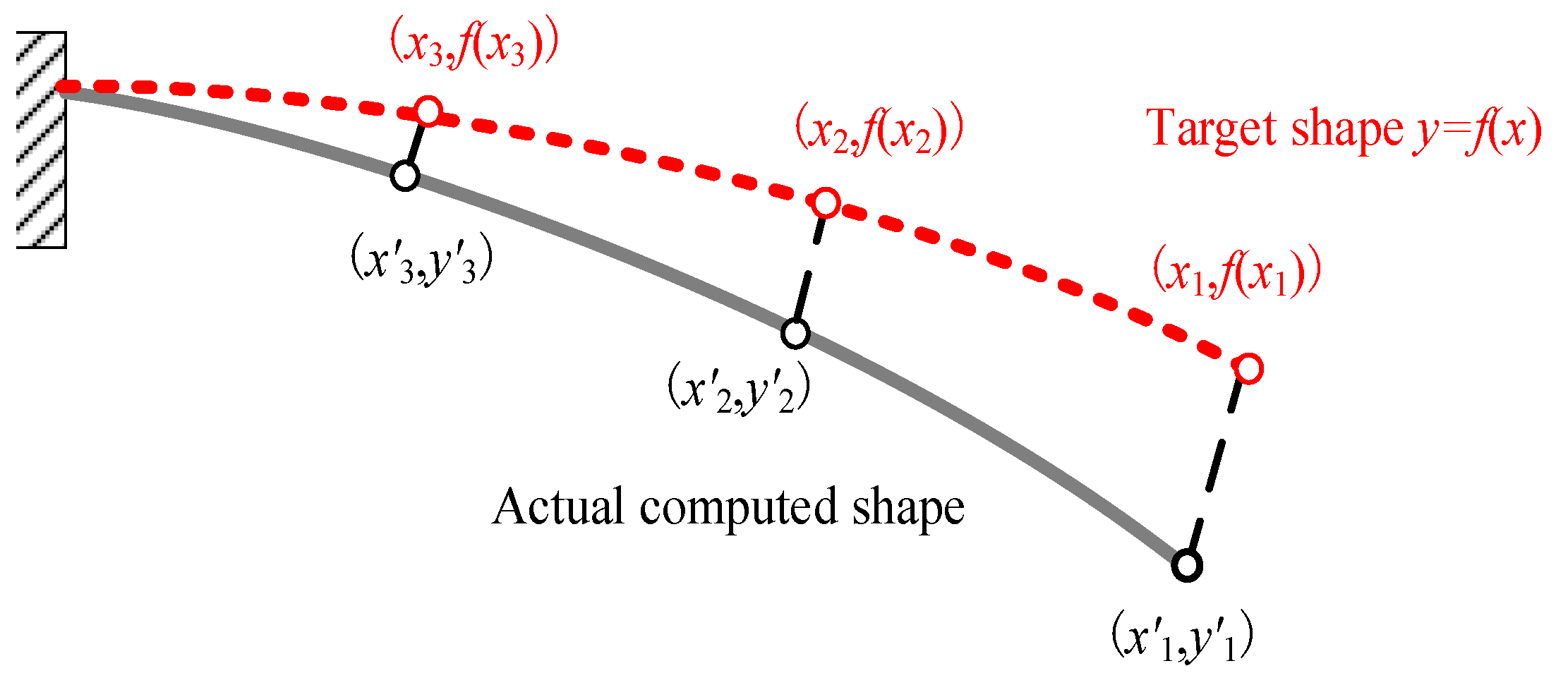
2.3. Definition of the Shape Error Function
2.4. Topology Optimization Model for Prescribed Two-Way Shape-Morphing SMA Actuators
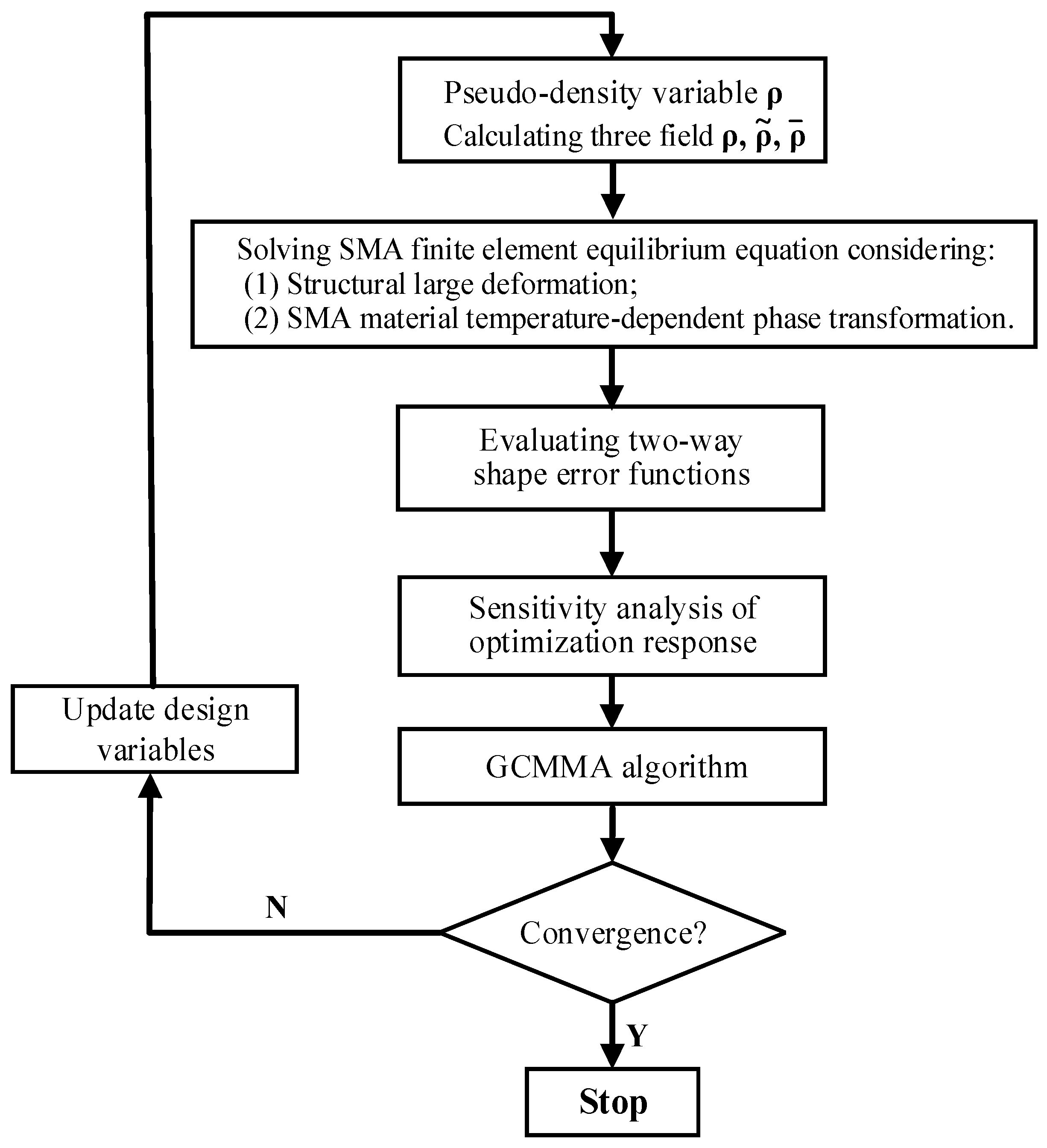
3. Nonlinear Finite Element Analysis and Optimization Response Sensitivity Analysis
3.1. Nonlinear Finite Element Analysis
3.2. Sensitivity Analysis of the Shape Error Optimization Response
4. Numerical Examples
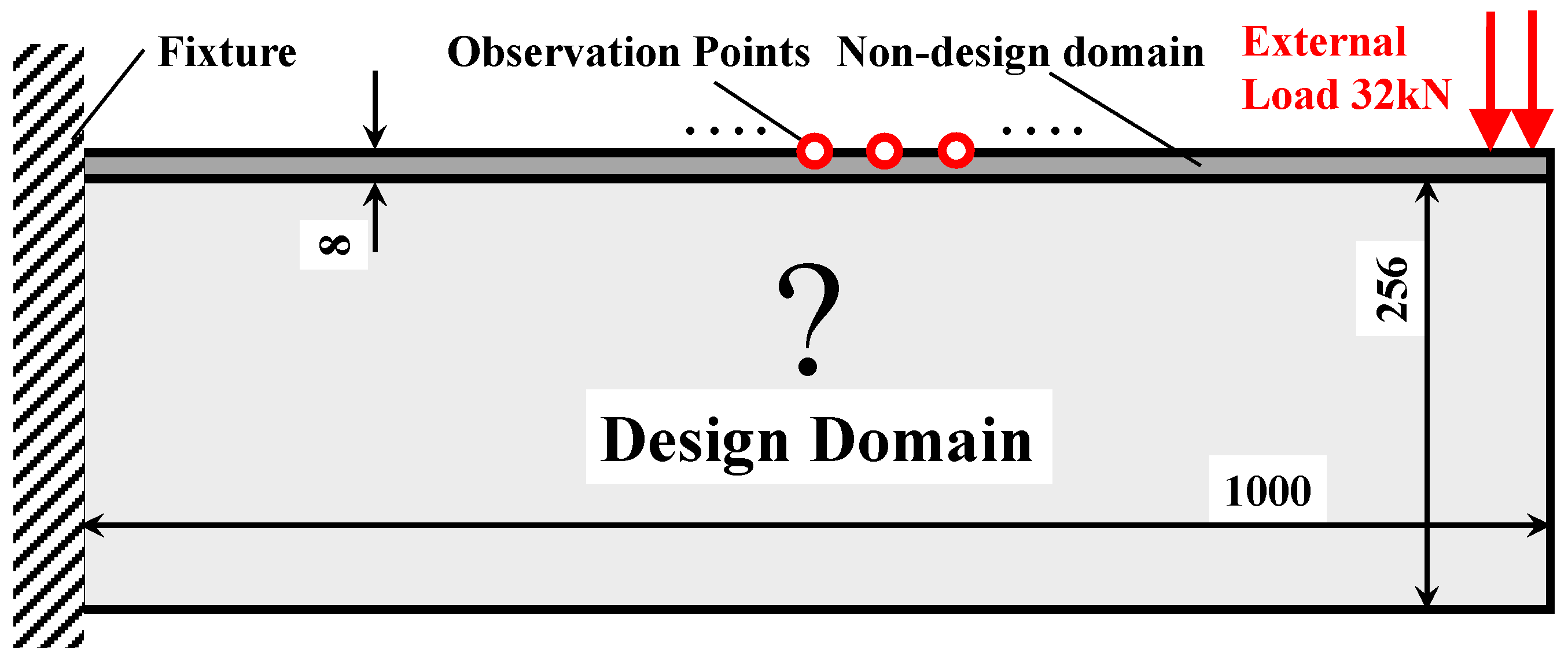
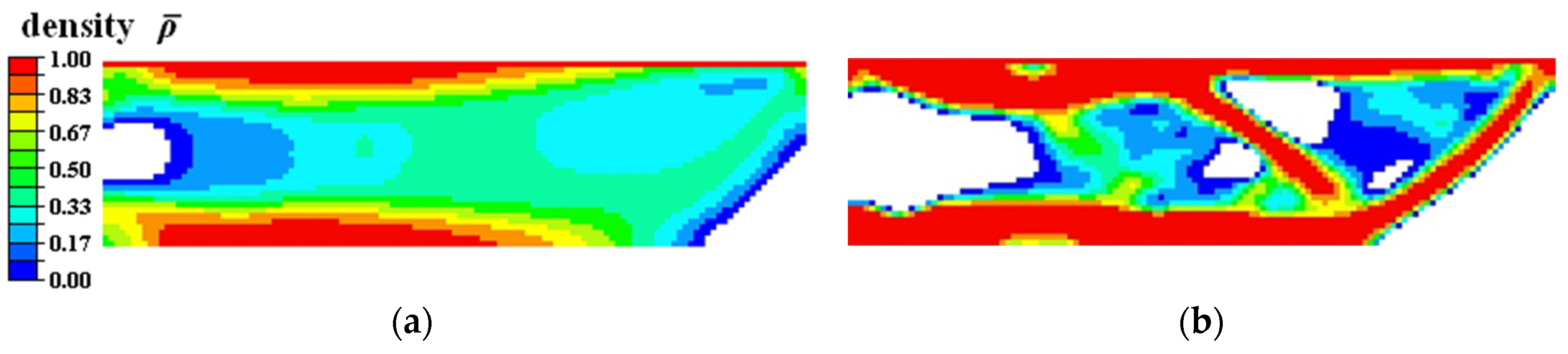
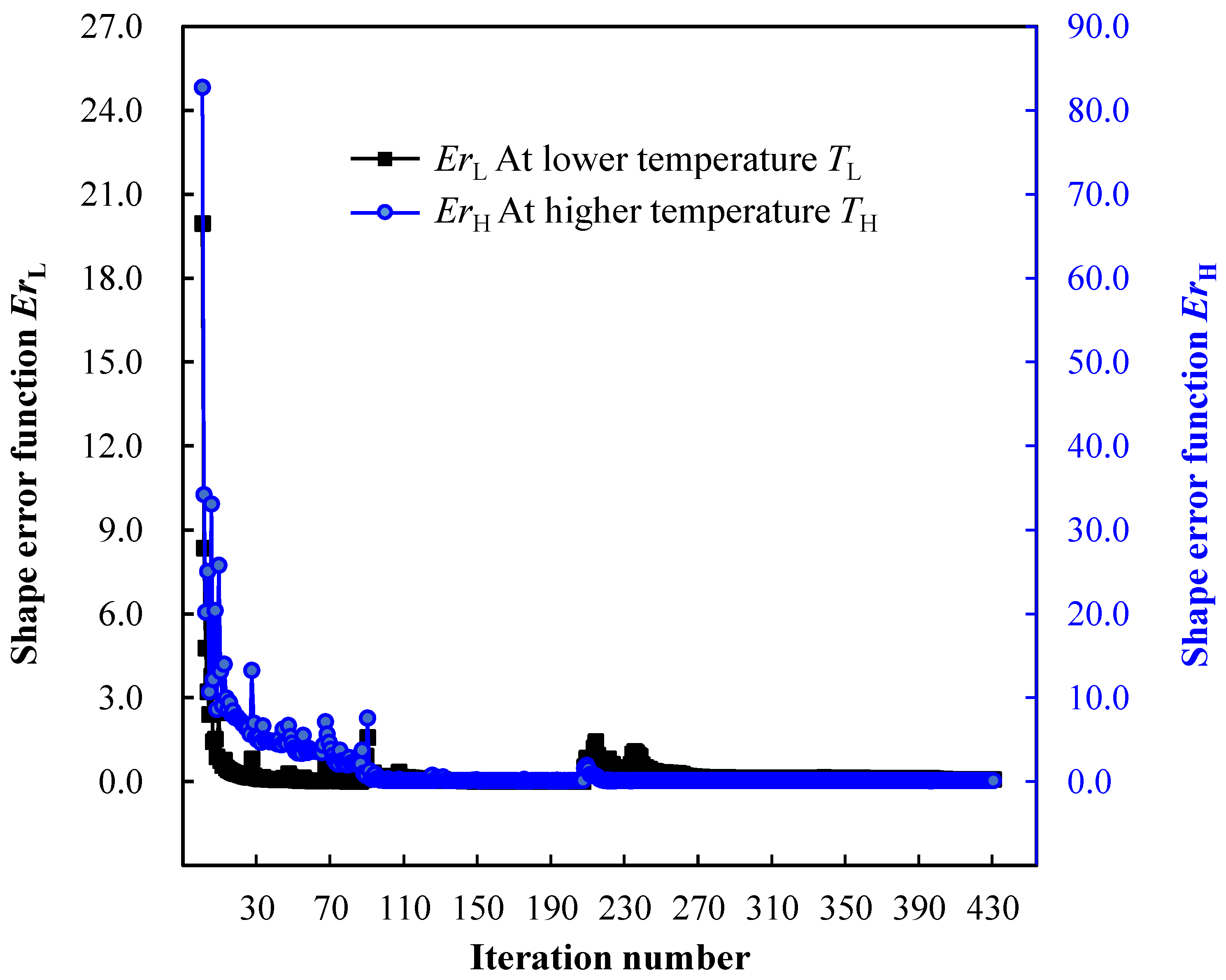
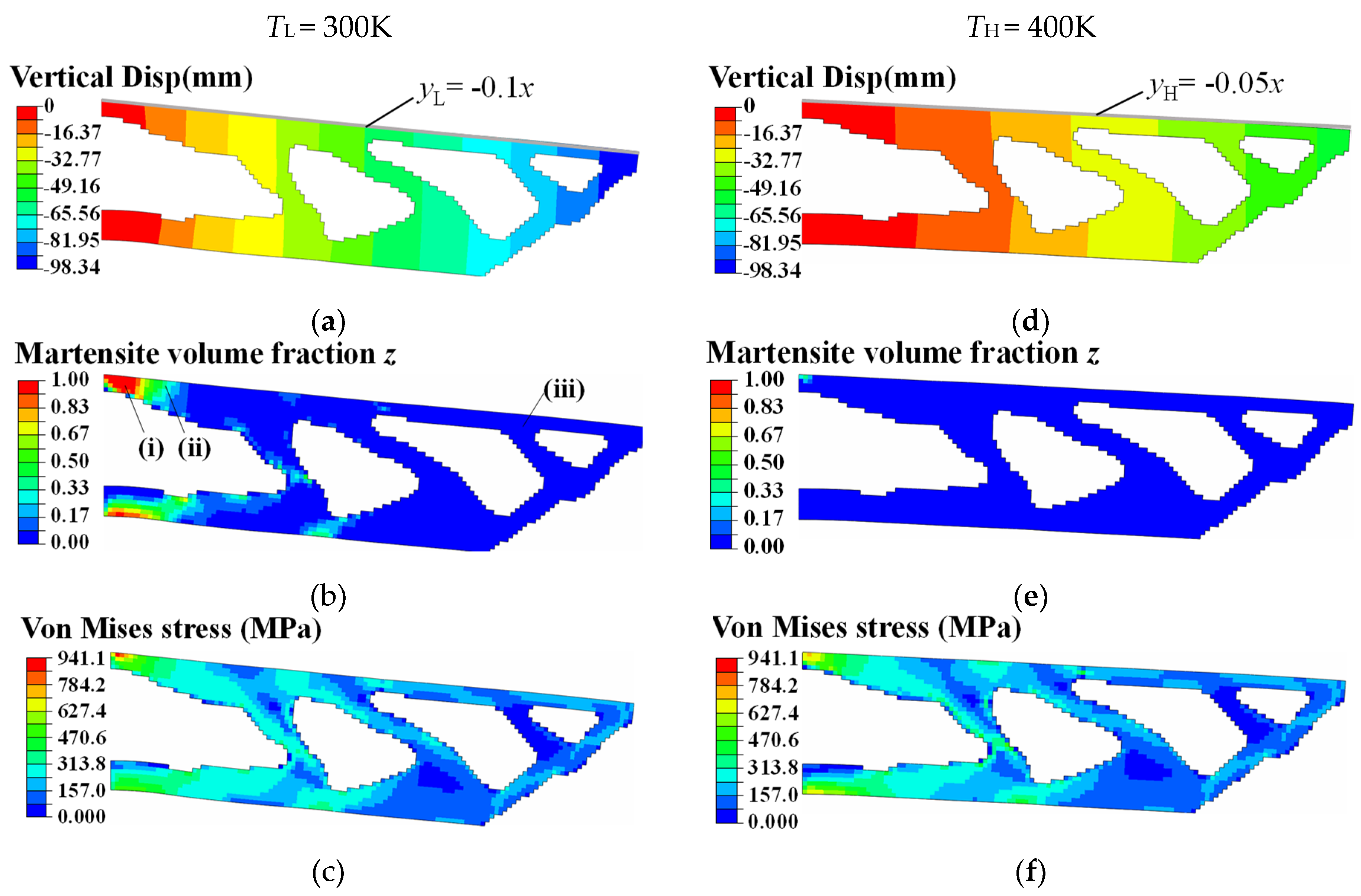
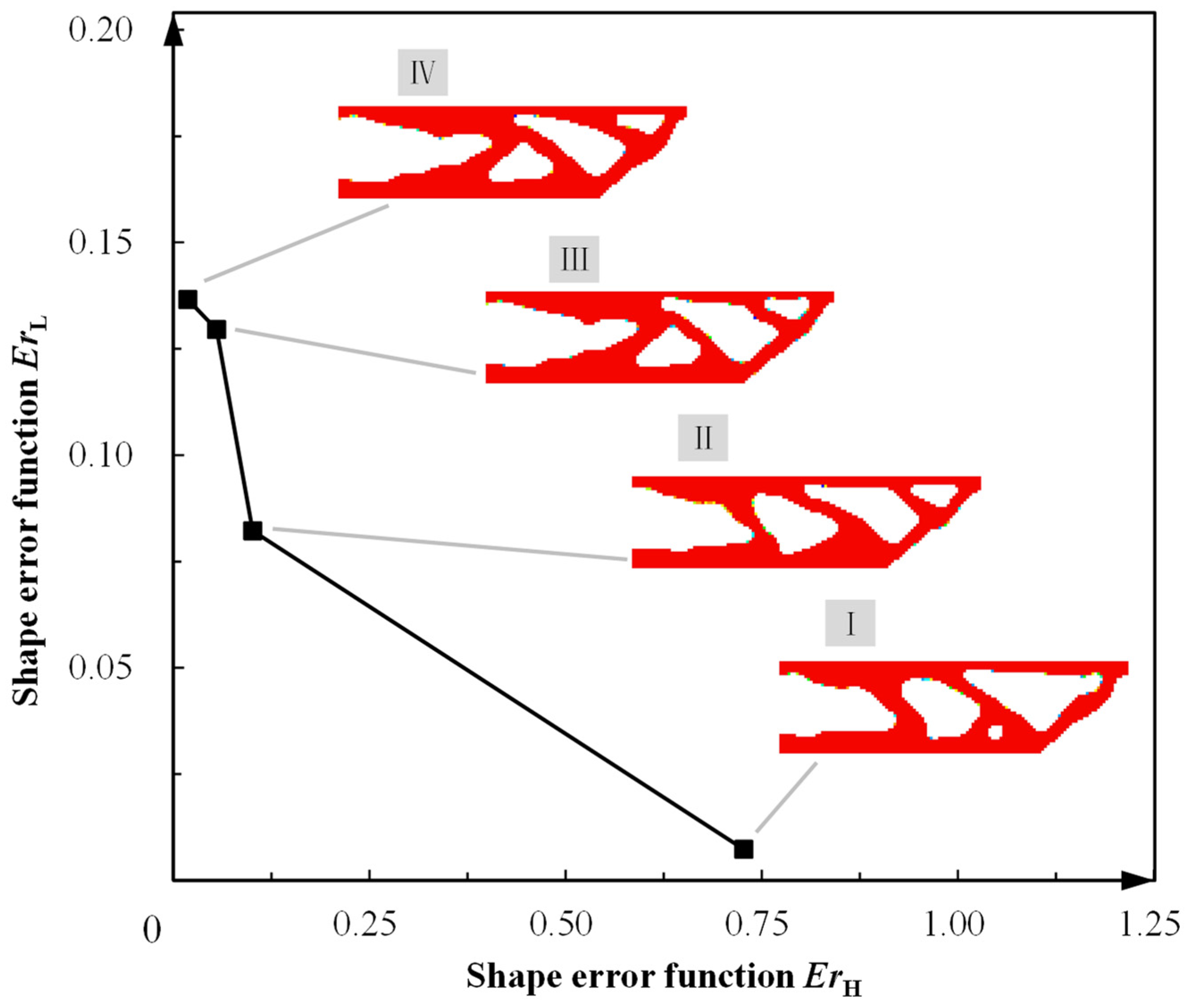
4.1. Topology Optimization of SMA Cantilever Beam for Prescribed Two-Way Shape Morphing
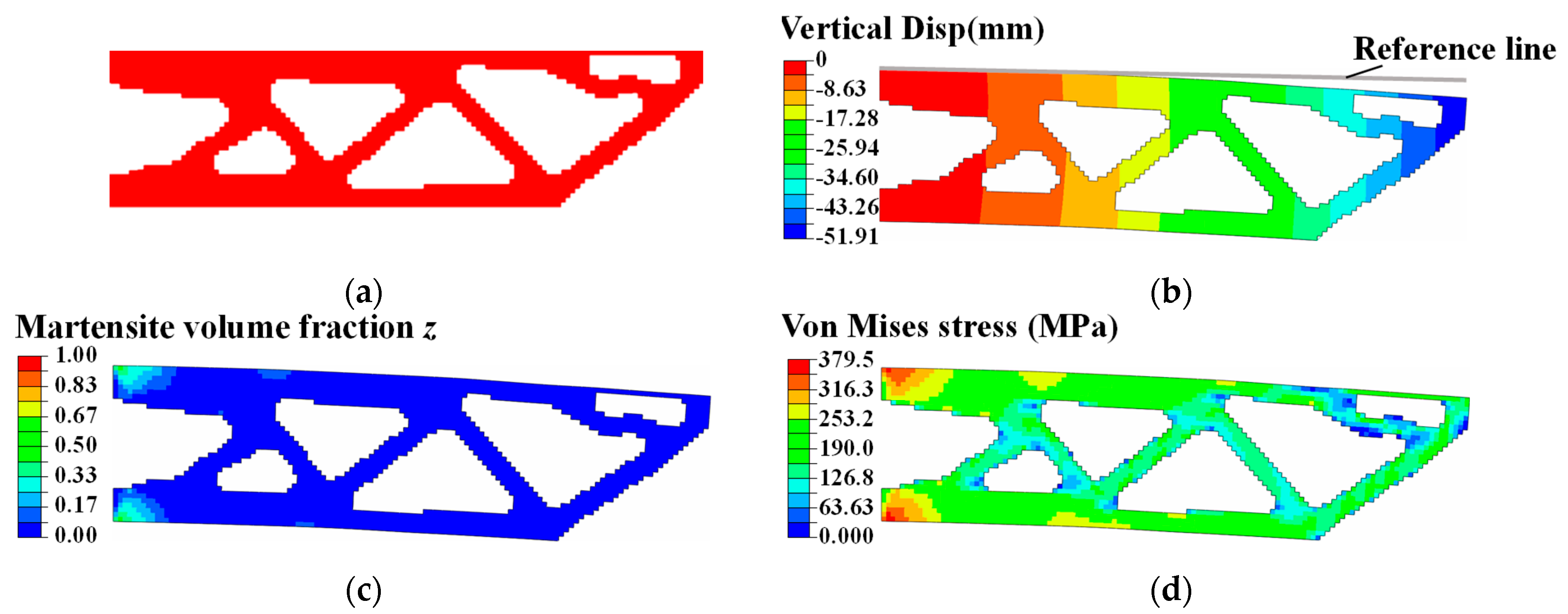
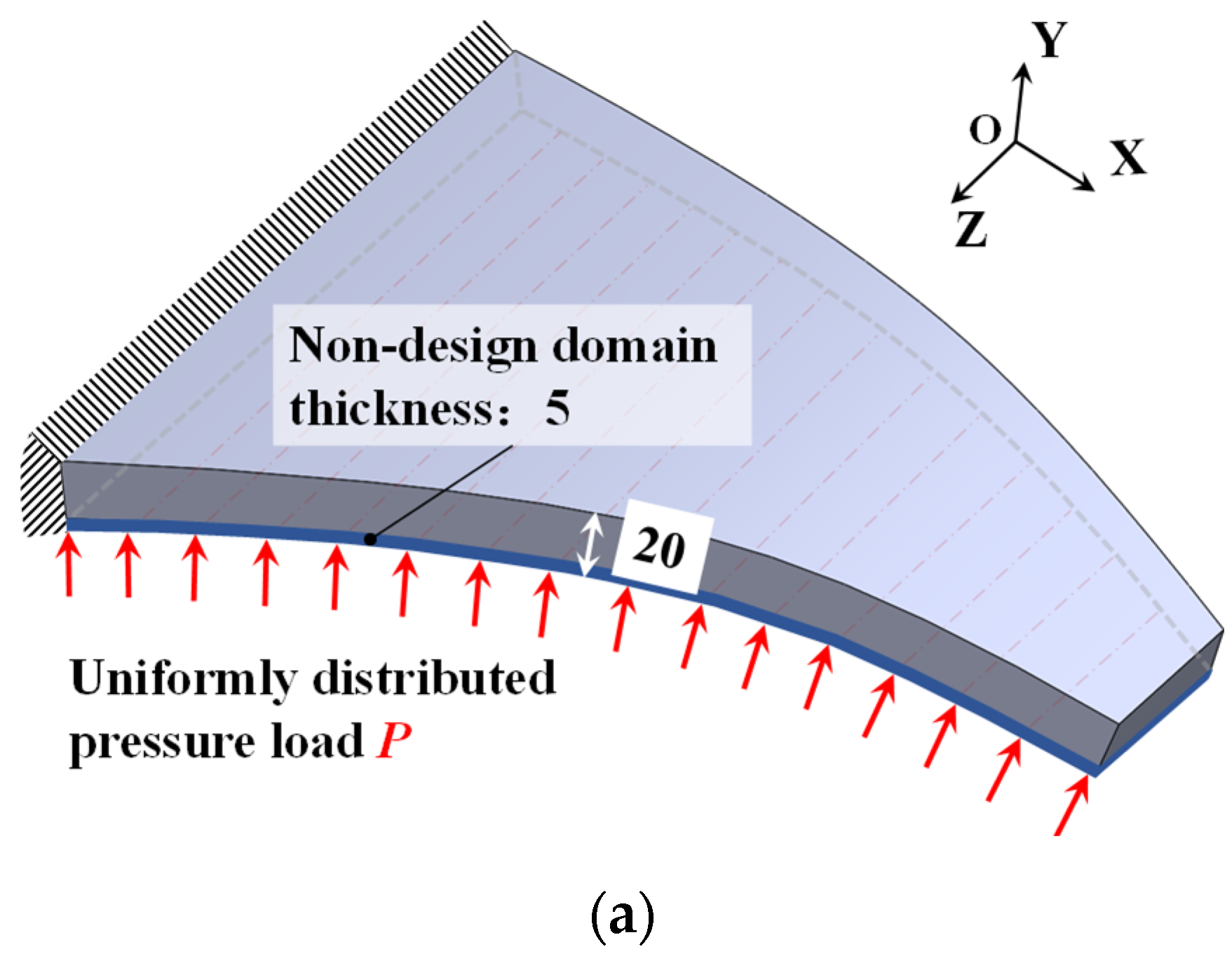
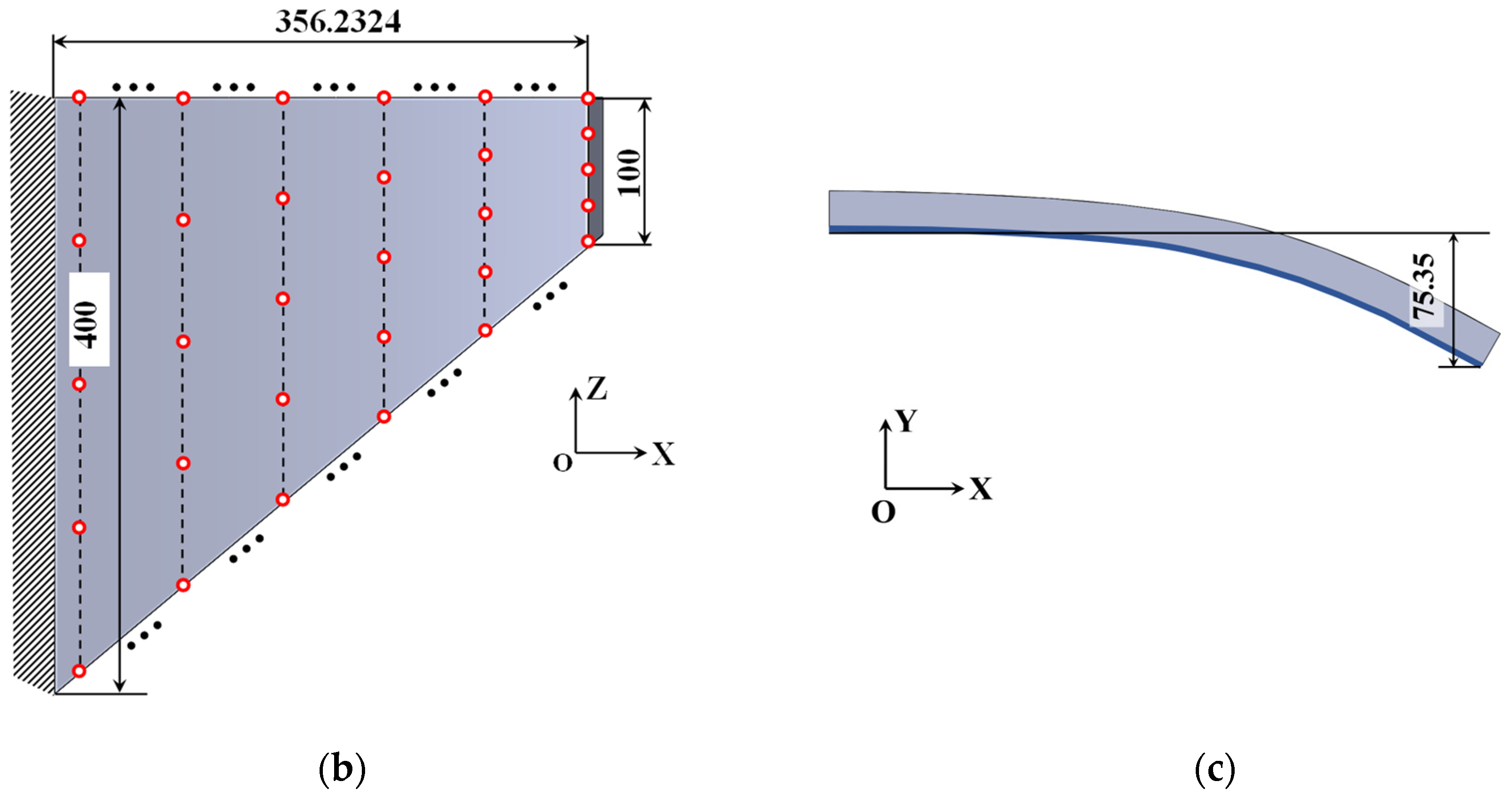
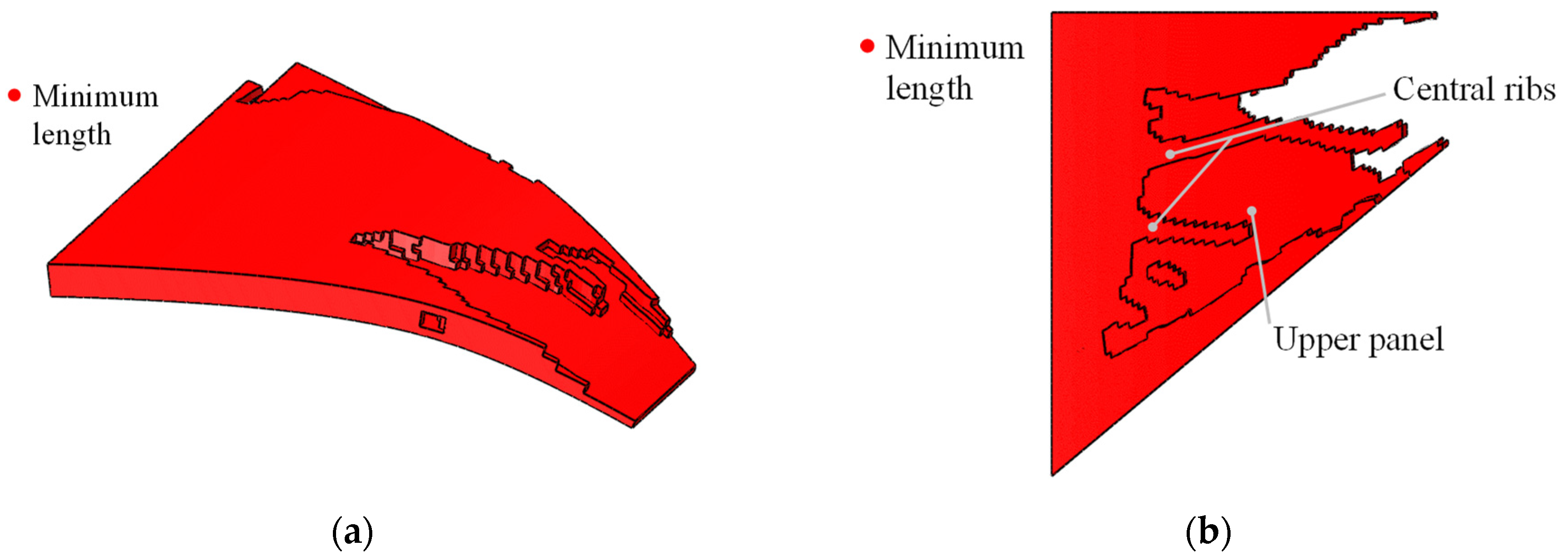
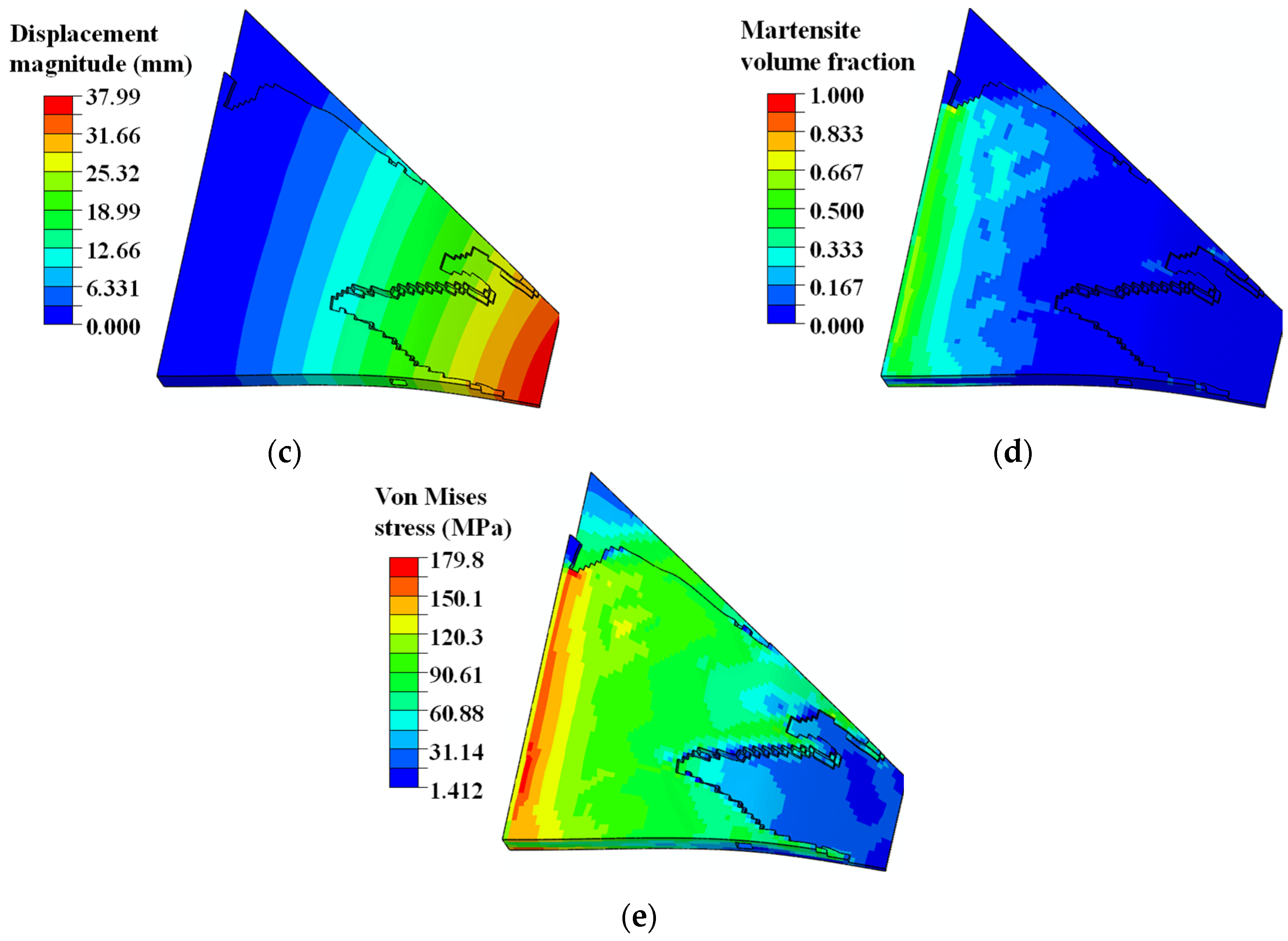
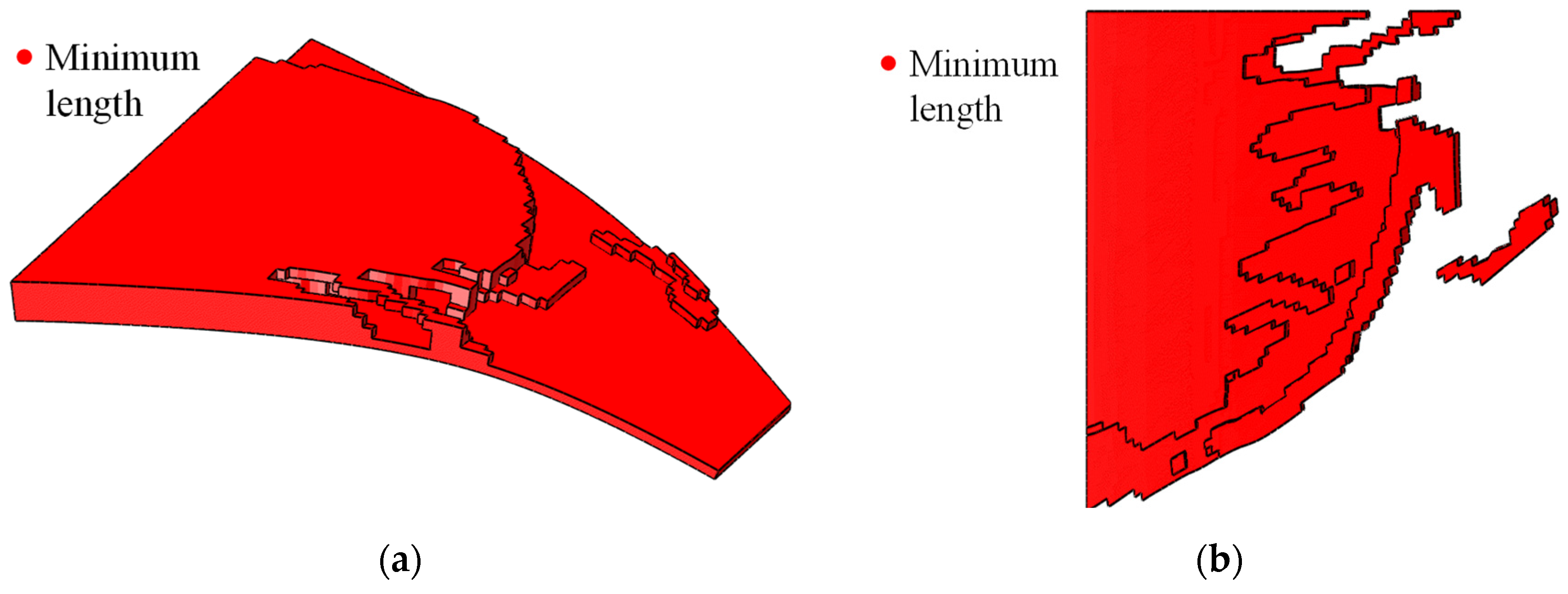
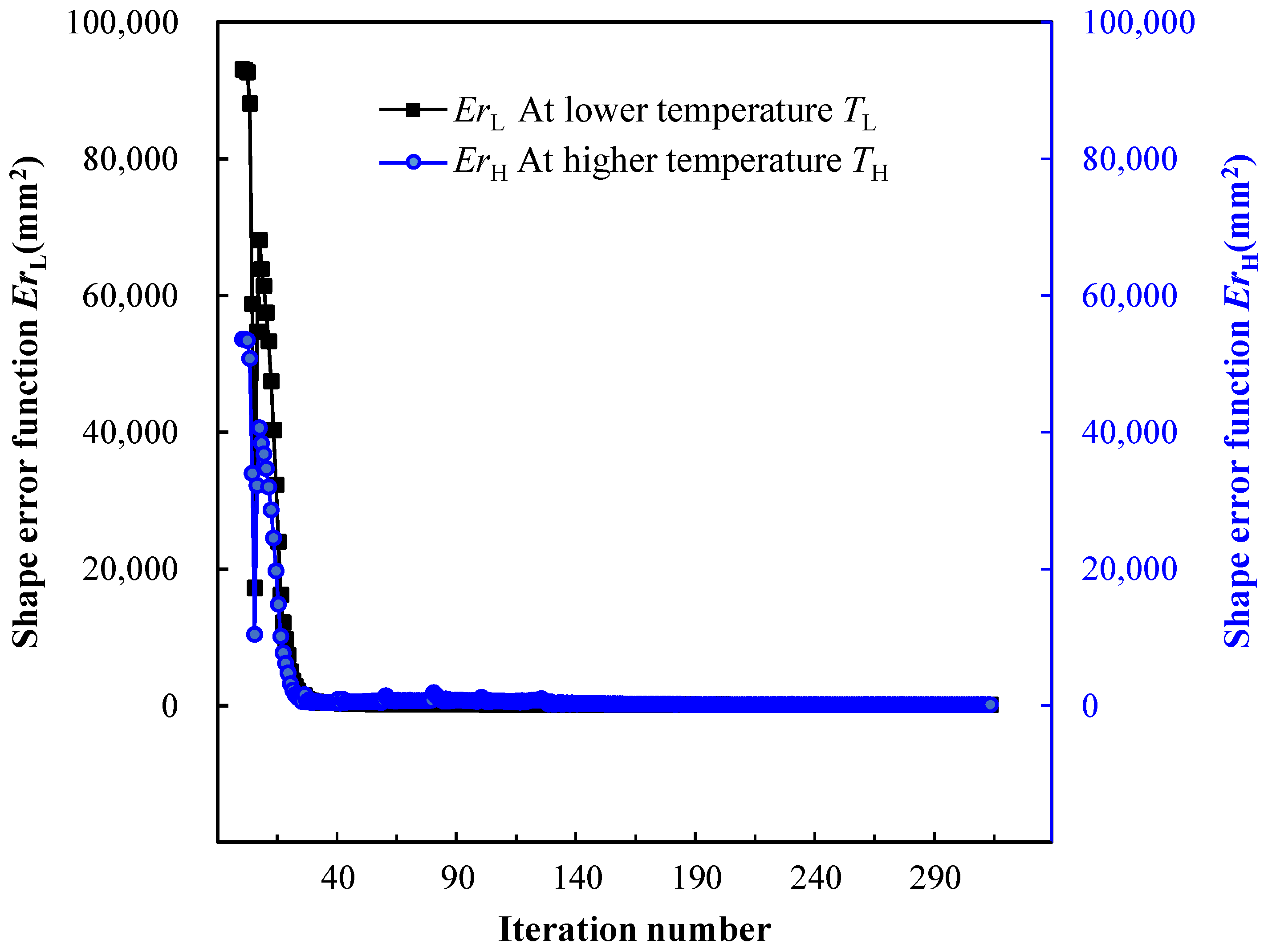
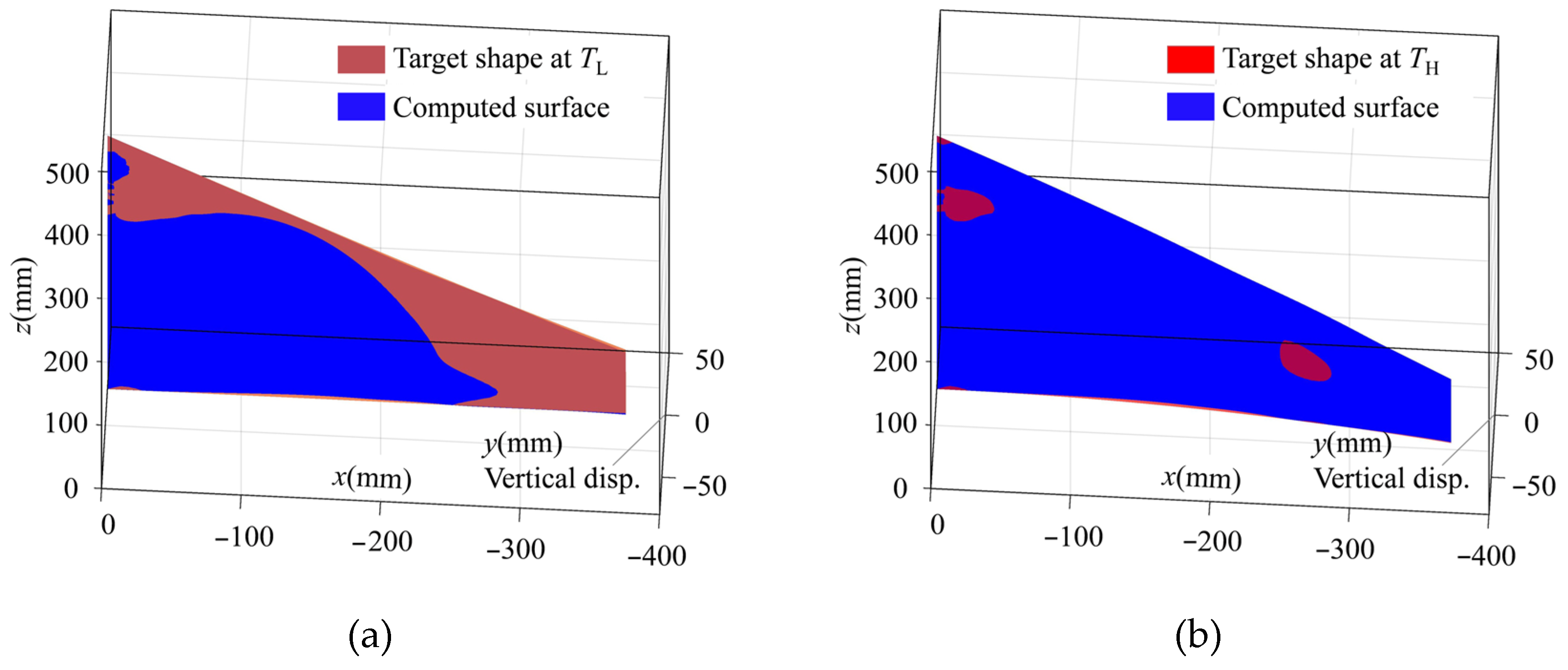
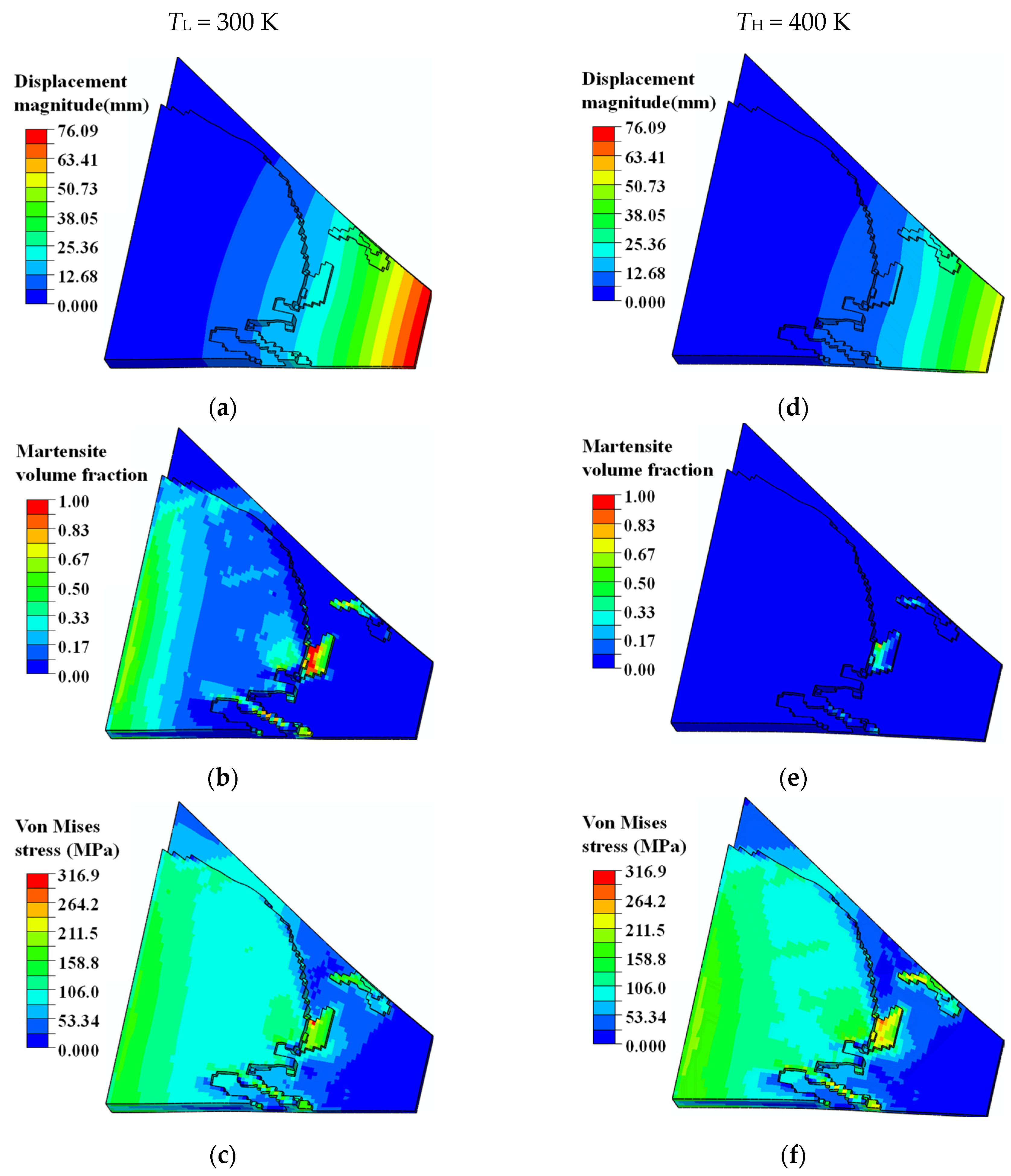
4.2. Topology Optimization of SMA Curved Wing for Prescribed Two-Way Shape Morphing
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- NASA to Test in-Flight Folding Spanwise Adaptive Wing to Enhance Aircraft Efficiency. Available online: https://www.nasa.gov/feature/nasa-to-test-in-flight-folding-spanwise-adaptive-wing-to-enhance-aircraft-efficiency (accessed on 14 October 2016).
- Shape Memory Alloy Technology Leads to Energy-Efficient CubeSat. Available online: https://engineering.unt.edu/news/shape-memory-alloy-technology-leads-energy-efficient-cubesathttps://engineering.unt.edu/news/shape-memory-alloy-technology-leads-energy-efficient-cubesat (accessed on 1 January 2019).
- 3D-Printed Structures “Remember” Their Shapes. Available online: https://news.mit.edu/2016/3-d-printed-structures-remember-shapes-drug-delivery-solar-panel-0826 (accessed on 26 August 2016).
- Breakthrough in Shape Memory Alloy 10 Million Bending Cycles before Failure. Available online: https://www.extremetech.com/extreme/207582-breakthrough-in-shape-memory-alloy-10-million-bending-cycles-before-failure (accessed on 9 June 2015).
- Hager, M.D.; Bode, S.; Weber, C.; Schubert, U.S. Shape memory polymers: Past, present and future developments. Prog. Polym. Sci. 2015, 49, 3–33. [Google Scholar] [CrossRef]
- Behl, M.; Lendlein, A. Shape-memory Polymers. Mater. Today 2007, 10, 20–28. [Google Scholar] [CrossRef]
- Zareie, S.; Issa, A.S.; Seethaler, R.J.; Zabihollah, A. Recent advances in the applications of shape memory alloys in civil infrastructures: A review. Structures 2020, 27, 1535–1550. [Google Scholar] [CrossRef]
- Qi, X.M.; Wang, E.L.; Dong, Y.B.; Fu, Y.Q. Research Progress of two-way shape memory polymer and its composites under stress-free condition. J. Zhejiang Sci-Tech Univ. 2019, 41, 300–307. [Google Scholar]
- Jani, J.M.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Kang, Z.L.; James, K.A. Thermomechanical topology optimization of shape-memory alloy structures using a transient bilevel adjoint method. Int. J. Numer. Methods Eng. 2020, 121, 2558–2580. [Google Scholar] [CrossRef]
- Hartl, D.J.; Lagoudas, D.C.; Calkins, F.T.; Mabe, J.H. Use of a Ni60Ti shape memory alloy for active jet engine chevron application: II. Experimentally validated numerical analysis. Smart Mater. Struct. 2010, 19, 015021. [Google Scholar] [CrossRef]
- Khan, M.I.; Pequegnat, A.; Zhou, Y.N. Multiple memory shape memory alloys. Adv. Eng. Mater. 2013, 15, 386–393. [Google Scholar] [CrossRef]
- Li, P.Y.; Wang, Y.S.; Meng, F.Y.; Cao, L.; He, Z.R. Effect of heat treatment temperature on martensitic transformation and superelasticity of the Ti49Ni51 shape memory alloy. Materials 2019, 12, 2539. [Google Scholar] [CrossRef] [PubMed]
- Ansari, M.; Fahimi, P.; Baghani, M.; Golzar, M. An experimental investigation on training of NiTi-based shape memory alloys. Int. J. Appl. Mech. 2018, 10, 1850040. [Google Scholar] [CrossRef]
- Hartl, D.J.; Lagoudas, D.C. Aerospace applications of shape memory alloys. Proc. Inst. Mech. Eng.-Part G 2014, 221, 535–552. [Google Scholar] [CrossRef]
- Kudva, J.N. Overview of the DARPA Smart Wing Project. J. Intell. Mater. Syst. Struct. 2004, 15, 261–267. [Google Scholar] [CrossRef]
- Bil, C.; Massey, K.; Abdullah, E.J. Wing morphing control with shape memory alloy actuators. J. Intell. Mater. Syst. Struct. 2013, 24, 879–898. [Google Scholar] [CrossRef]
- Han, M.W.; Rodrigue, H.; Kim, H.I.; Song, S.H.; Ahn, S.H. Shape memory alloy/glass fiber woven composite for soft morphing winglets of unmanned aerial vehicles. Compos. Struct. 2016, 140, 202–212. [Google Scholar] [CrossRef]
- Zaki, W.; Moumni, Z. A three-dimensional model of the thermomechanical behavior of shape memory alloys. J. Mech. Phys. Solids 2007, 55, 2455–2490. [Google Scholar] [CrossRef]
- Kundu, A.; Banerjee, A. Coupled thermomechanical modelling of shape memory alloy structures undergoing large deformation. Int. J. Mech. Sci. 2022, 220, 107102. [Google Scholar] [CrossRef]
- Bouvet, C.; Calloch, S.; Lexcellent, C. A phenomenological model for pseudoelasticity of shape memory alloys under multiaxial proportional and nonproportional loadings. Eur. J. Mech.-A/Solids 2004, 23, 37–61. [Google Scholar] [CrossRef]
- Zhang, Y.H.; You, Y.J.; Moumni, Z.; Anlas, G.; Zhu, J.H.; Zhang, W.H. Experimental and theoretical investigation of the frequency effect on low cycle fatigue of shape memory alloys. Int. J. Plast. 2017, 90, 1–30. [Google Scholar] [CrossRef]
- Falk, F. Model free energy, mechanics, and thermodynamics of shape memory alloys. Acta Metall. 1980, 28, 1773–1780. [Google Scholar] [CrossRef]
- Zhang, Y.Q.; Jiang, S.Y.; Zhao, G.L.; Guo, K.R. Transformation yield surface of nanocrystalline NiTi shape memory alloy. Int. J. Mech. Sci. 2022, 222, 107102. [Google Scholar] [CrossRef]
- Tanaka, K.; Ohnami, D.; Watanabe, T.; Kosegawa, J. Micromechanical simulations of thermomechanical behavior in shape memory alloys: Transformation conditions and thermomechanical hystereses. Mech. Mater. 2002, 34, 279–298. [Google Scholar] [CrossRef]
- Thabuis, A.; Thomas, S.; Martinez, T.; Perriard, Y. Shape memory effect of benchmark compliant mechanisms designed with topology optimization. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–9 July 2020; pp. 571–576. [Google Scholar]
- Jovanova, J.; Frecker, M.; Hamilton, R.F.; Palmer, T.A. Target shape optimization of functionally graded shape memory alloy compliant mechanisms. J. Intell. Mater. Syst. Struct. 2019, 30, 1385–1396. [Google Scholar] [CrossRef]
- Gu, X.J.; Yang, K.K.; Wu, M.Q.; Zhang, Y.H.; Zhu, J.H.; Zhang, W.H. Integrated optimization design of smart morphing wing for accurate shape control. Chin. J. Aeronaut. 2021, 34, 135–147. [Google Scholar] [CrossRef]
- Bhattacharyya, A.; James, K.A. Topology optimization of shape memory polymer structures with programmable morphology. Struct. Multidiscip. Optim. 2021, 63, 1863–1887. [Google Scholar] [CrossRef]
- Langelaar, M.; Yoon, G.H.; Kim, Y.Y.; Keulen, F.V. Topology optimization of planar shape memory alloy thermal actuators using element connectivity parameterization. Int. J. Numer. Methods Eng. 2011, 88, 817–840. [Google Scholar] [CrossRef]
- Hou, J.; Wei, C.; Gu, X.J.; Zhu, J.H.; Zhang, W.H. Topology Optimization for Energy Dissipation Structures Based on Shape Memory Alloys. Struct. Multidiscip. Optim. 2023, 66, 55. [Google Scholar] [CrossRef]
- Kang, Z.; James, K. Multiphysics design of programmable shape-memory alloy-based smart structures via topology optimization. Struct. Multidiscip. Optim. 2022, 65, 24. [Google Scholar] [CrossRef]
- Farber, E.; Zhu, J.N.; Popovich, A.; Popovich, V. A review of NiTi shape memory alloy as a smart material produced by additive manufacturing. Mater. Today Proc. 2019, 30, 761–767. [Google Scholar] [CrossRef]
- Zhou, M.D.; Lazarov, B.S.; Wang, F.W.; Sigmund, O. Minimum length scale in topology optimization by geometric constraints. Comput. Methods Appl. Mech. Eng. 2015, 293, 266–282. [Google Scholar] [CrossRef]
- Ball, J.M.; James, R.D. Fine phase mixtures as minimizers of energy. Arch. Ration. Mech. Anal. 1987, 100, 13–52. [Google Scholar] [CrossRef]
- Gu, X.J.; Zaki, W.; Morin, C.; Moumni, Z.; Zhang, W.H. Time integration and assessment of a model for shape memory alloys considering multiaxial nonproportional loading cases. Int. J. Solids Struct. 2014, 54, 82–99. [Google Scholar] [CrossRef]
- Shaw, J.A.; Kyriakides, S. Thermomechanical aspects of NiTi. J. Mech. Phys. Solids 1995, 43, 1243–1281. [Google Scholar] [CrossRef]
- Sigmund, O. A 99 line topology optimization code written in MATLAB. Struct. Multidiscip. Optim. 2001, 21, 120–127. [Google Scholar] [CrossRef]
- Andreassen, E.; Clausen, A.; Schevenels, M.; Lazarov, B.S.; Sigmund, O. Efficient topology optimization in MATLAB using 88 lines of code. Struct. Multidiscip. Optim. 2011, 43, 1–16. [Google Scholar] [CrossRef]
- Wang, F.W.; Lazarov, B.S.; Sigmund, O. On projection methods, convergence and robust formulations in topology optimization. Struct. Multidiscip. Optim. 2011, 43, 767–784. [Google Scholar] [CrossRef]
- Hou, J.; Gu, X.J.; Zhu, J.H.; Wang, J.; Zhang, W.H. Topology optimization of joint load control with geometrical nonlinearity. Chin. J. Aeronaut. 2020, 33, 372–382. [Google Scholar] [CrossRef]
- Yang, K.K.; Fernandez, E.; Niu, C.; Duysinx, P.; Zhu, J.H.; Zhang, W.H. Note on spatial gradient operators and gradient-based minimum length constraints in SIMP topology optimization. Struct. Multidiscip. Optim. 2019, 60, 393–400. [Google Scholar] [CrossRef]
- Svanberg, K. A globally convergent version of MMA without linesearch. In Proceedings of the Proceedings of the First World Congress of Structural and Multidisciplinary Optimization, Goslar, Germany, 28 May–2 June 1995; pp. 9–16.
- Buhl, T.; Pedersen, C.B.W.; Sigmund, O. Stiffness design of geometrically nonlinear structures using topology optimization. Struct. Multidiscip. Optim. 2000, 19, 93–104. [Google Scholar] [CrossRef]
- Luo, Y.J.; Wang, M.Y.; Kang, Z. Topology optimization of geometrically nonlinear structures based on an additive hyperelasticity technique. Comput. Methods Appl. Mech. Eng. 2015, 286, 422–441. [Google Scholar] [CrossRef]
- Wang, F.W.; Lazarov, B.S.; Sigmund, O.; Jensen, J.S. Interpolation scheme for fictitious domain techniques and topology optimization of finite strain elastic problems. Comput. Methods Appl. Mech. Eng. 2014, 276, 453–472. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Taylor, R.L.; Fox, D. The Finite Element Method for Solid and Structural Mechanics, 7th ed.; Butterworth-Heinemann: Oxford, UK; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Parameter | Material Parameter | ||
|---|---|---|---|
| CA | 61,500 MPa | a | 6.8920 MPa |
| CM | 24,000 MPa | b | 6.9091 MPa |
| v | 0.3 | ε0 | 4% |
| Y | 110 MPa | G | 4.6556 MPa |
| αs | 2750 MPa | βs | 5500 MPa |
| ξs | 0.4381 MPa/°C | k | 2.4920 MPa |
| Af0 | 40 °C | T | Material temperature |
| Material Parameter | Material Parameter | ||
|---|---|---|---|
| CA | 45,200 MPa | a | 0.24 MPa |
| CM | 26,400 MPa | b | 0.096 MPa |
| v | 0.3 | ε0 | 0.8% |
| Y | 30 MPa | G | 1.92 MPa |
| αs | 2500 MPa | βs | 6250 MPa |
| ξs | 0.0145 MPa/K | κ | 0.038 MPa |
| A0f | 300 K | T | Material temperature |
| Material Parameter | Material Parameter | ||
|---|---|---|---|
| CA | 30,340 MPa | a | 5.16 MPa |
| CM | 18,000 MPa | b | 6.36 MPa |
| v | 0.3 | ε0 | 4% |
| Y | 30 MPa | G | 13.17 MPa |
| αs | 500 MPa | βs | 1250 MPa |
| ξs | 0.2 MPa/K | κ | 4.16 MPa |
| A0f | 300 K | T | Material temperature |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, K.; Luo, J.; Yuan, Z.; Ma, W.; Hou, J.; Gu, X.; Wang, D.; Yuan, Q. Topology Optimization of Shape Memory Alloy Actuators for Prescribed Two-Way Transforming Shapes. Actuators 2024, 13, 65. https://doi.org/10.3390/act13020065
Yang K, Luo J, Yuan Z, Ma W, Hou J, Gu X, Wang D, Yuan Q. Topology Optimization of Shape Memory Alloy Actuators for Prescribed Two-Way Transforming Shapes. Actuators. 2024; 13(2):65. https://doi.org/10.3390/act13020065
Chicago/Turabian StyleYang, Kaike, Junpeng Luo, Zhaoting Yuan, Wenjing Ma, Jie Hou, Xiaojun Gu, Deen Wang, and Qiang Yuan. 2024. "Topology Optimization of Shape Memory Alloy Actuators for Prescribed Two-Way Transforming Shapes" Actuators 13, no. 2: 65. https://doi.org/10.3390/act13020065