

Terminal Sliding Mode Force Control Based on Modified Fast Double-Power Reaching Law for Aerospace Electro-Hydraulic Load Simulator of Large Loads


Abstract
1. Introduction
- (1)
- The causes and characteristics of surplus force and a significant phase lag are analyzed, based on a precise mathematical model derived from a high-inertia electro-hydraulic load simulator.
- (2)
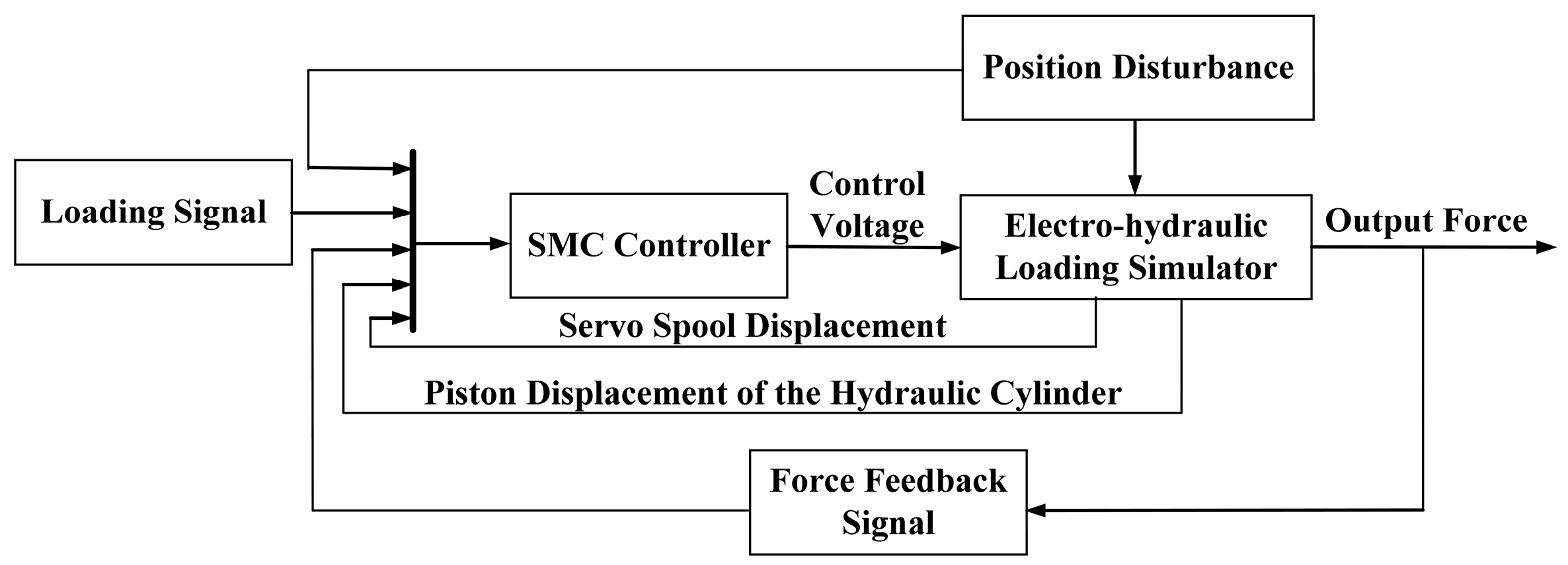
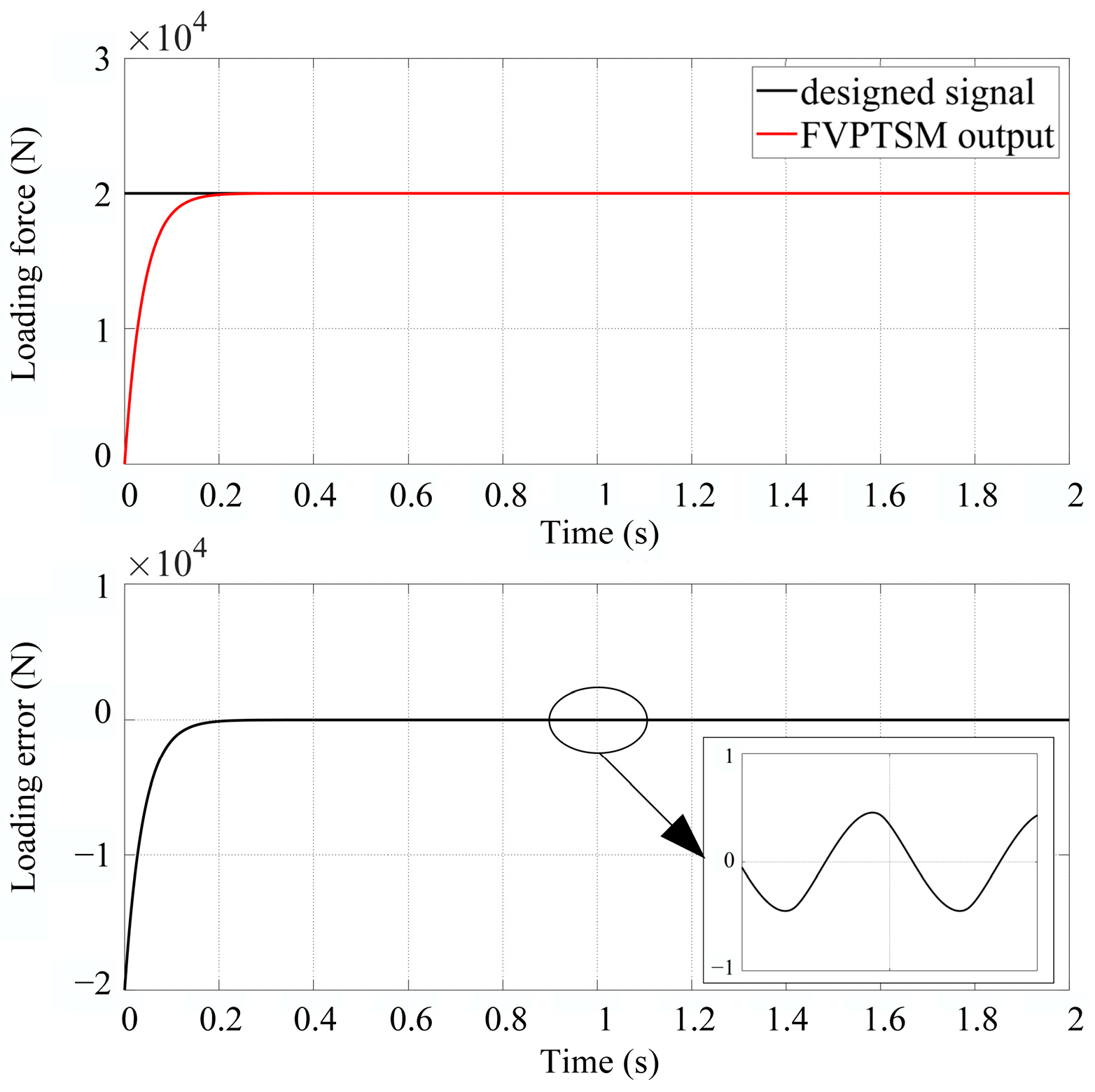
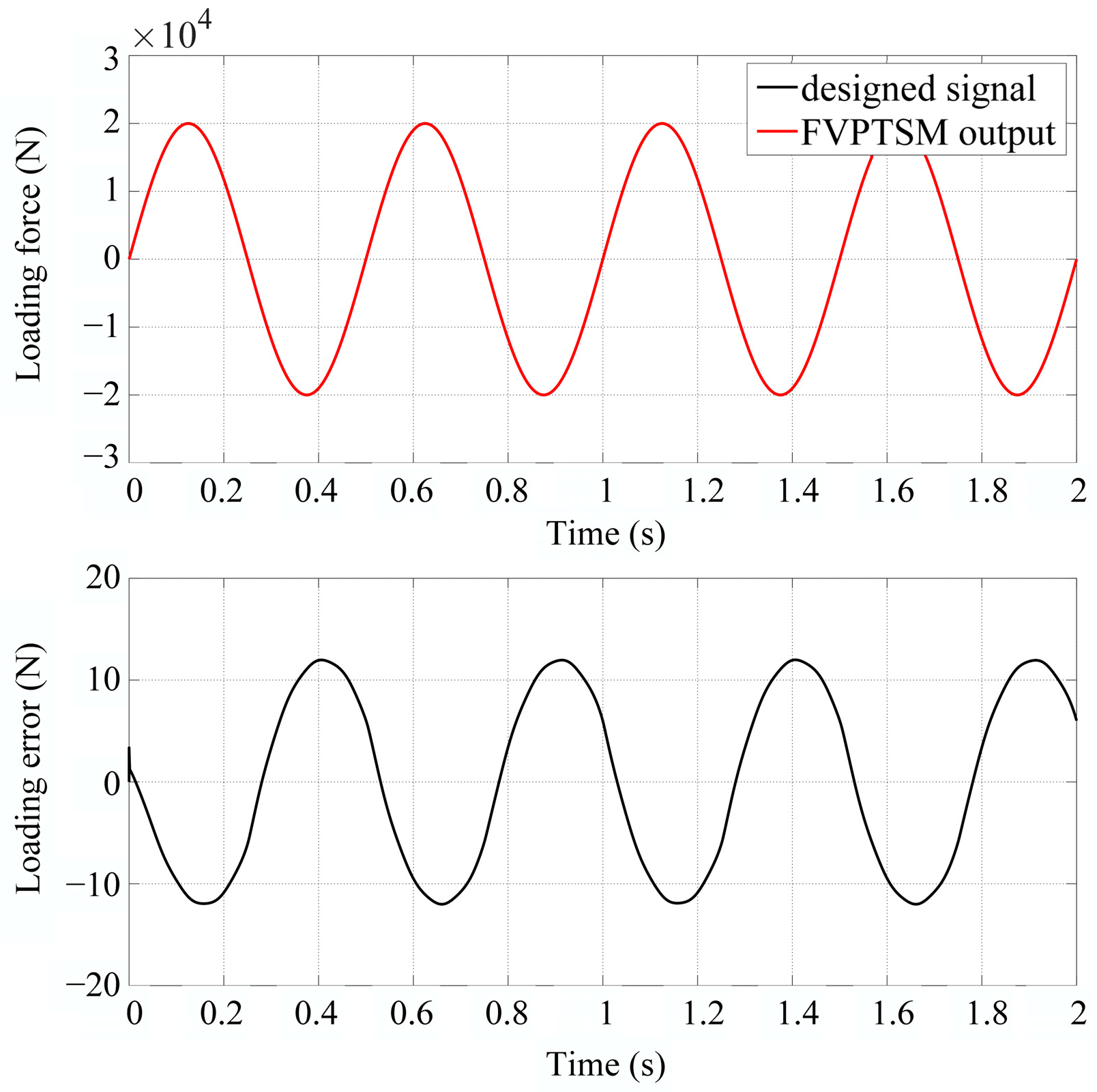
- Aimed at a high-inertia electro-hydraulic load simulator, a modified fast variable-power terminal sliding mode control strategy (FVPTSM) is proposed, which achieves both a finite convergence time and a finite-time proof, while employing the Lyapunov theory for stability analysis.
- (3)
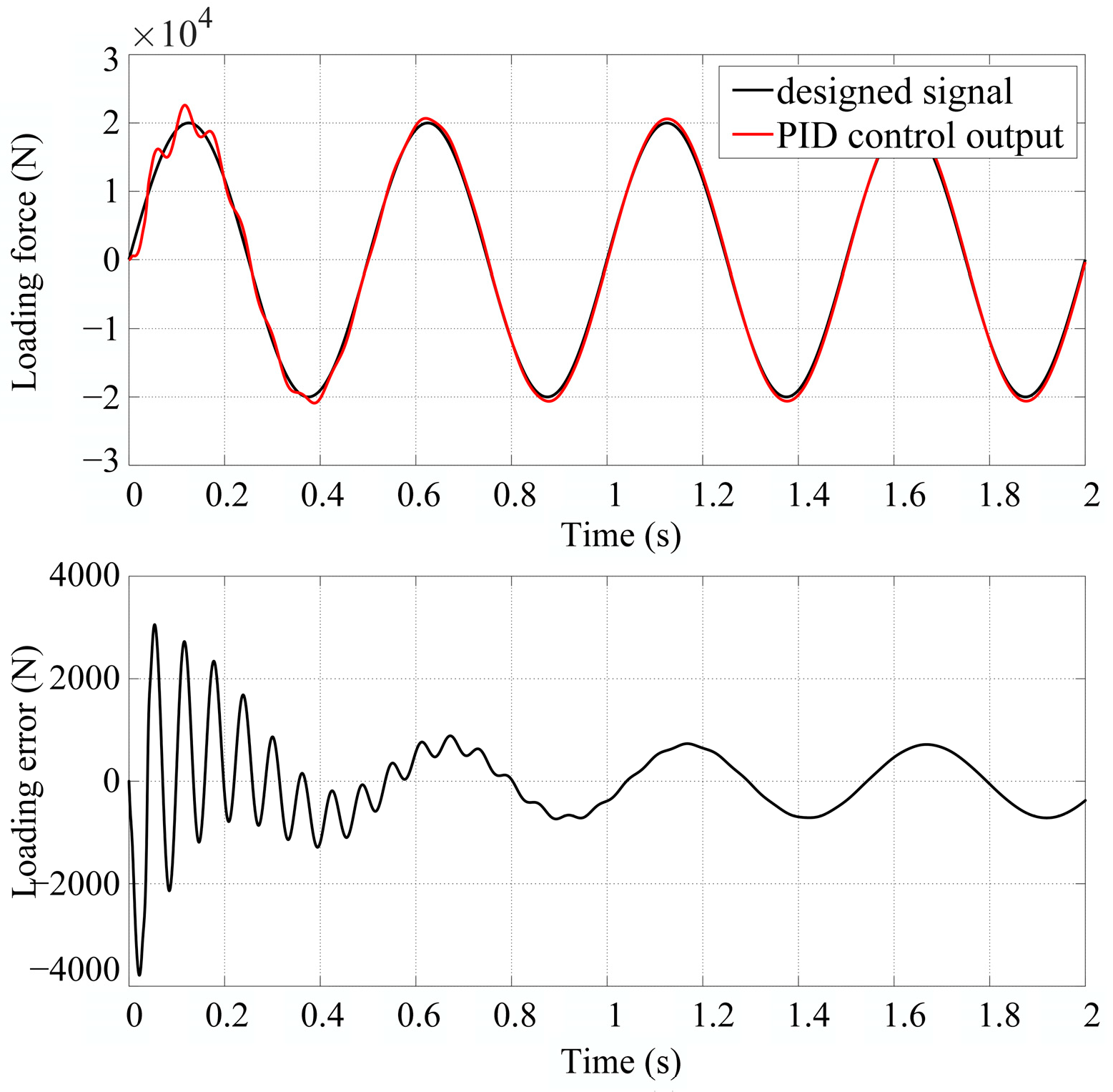
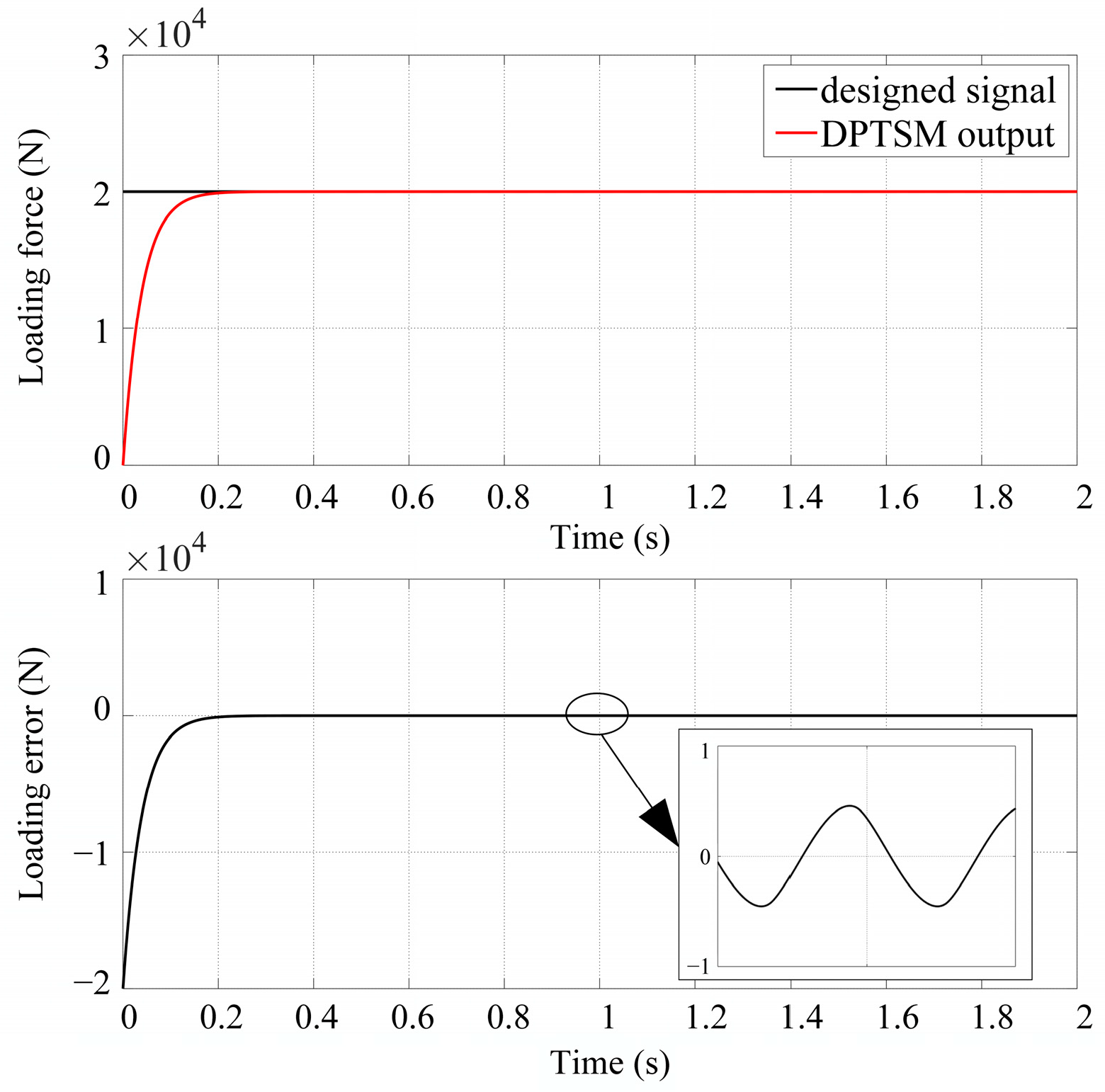
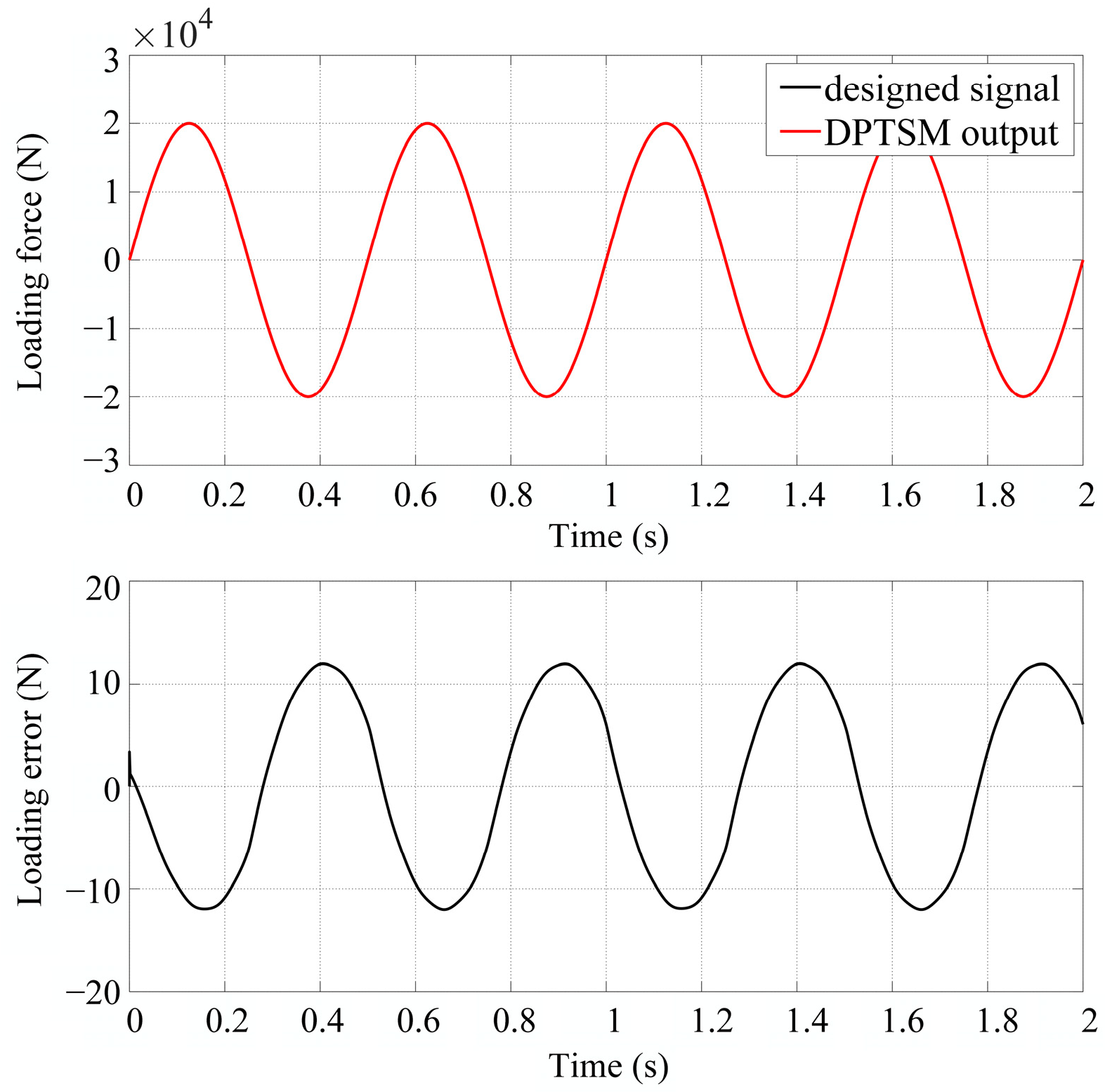
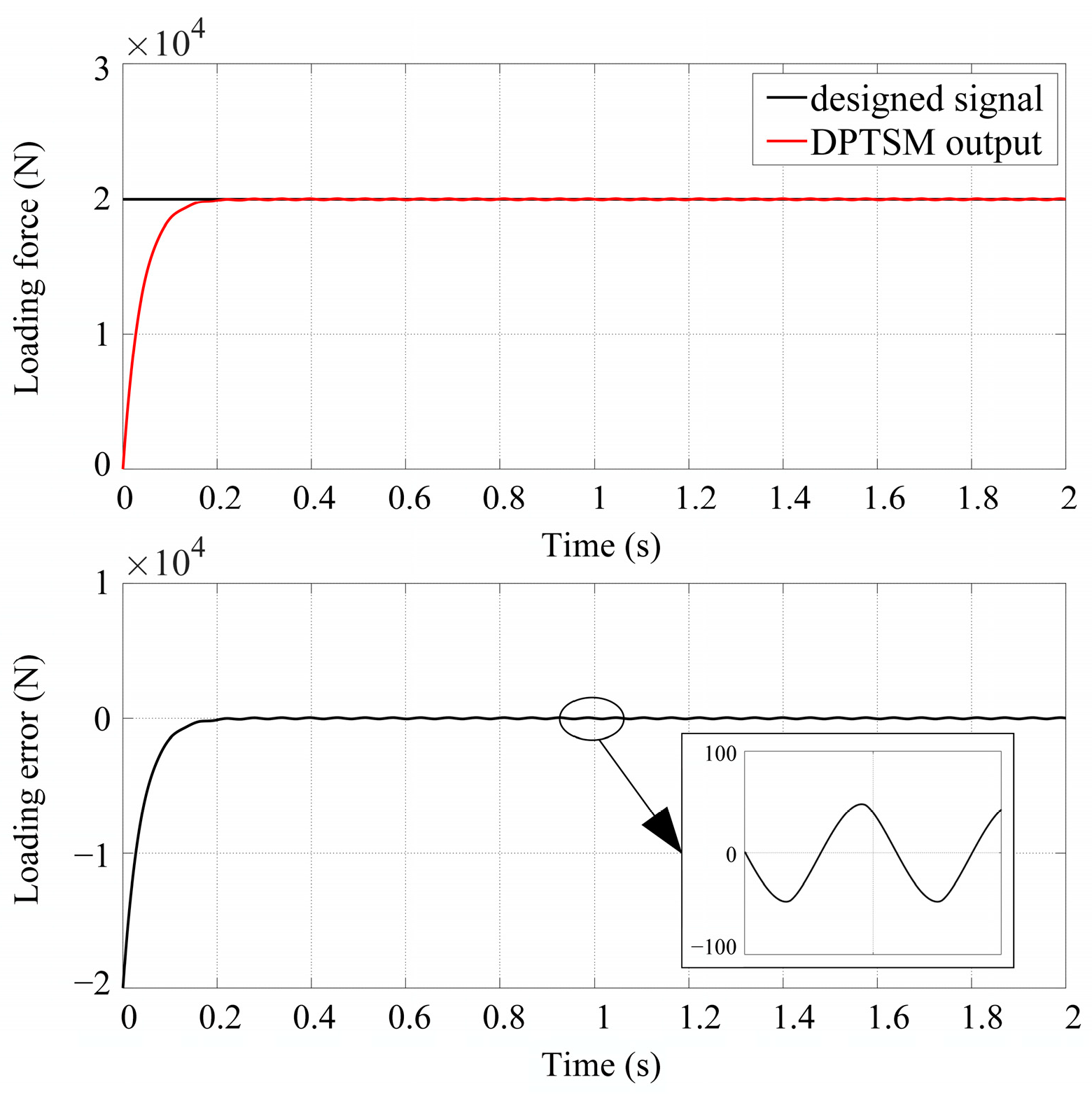
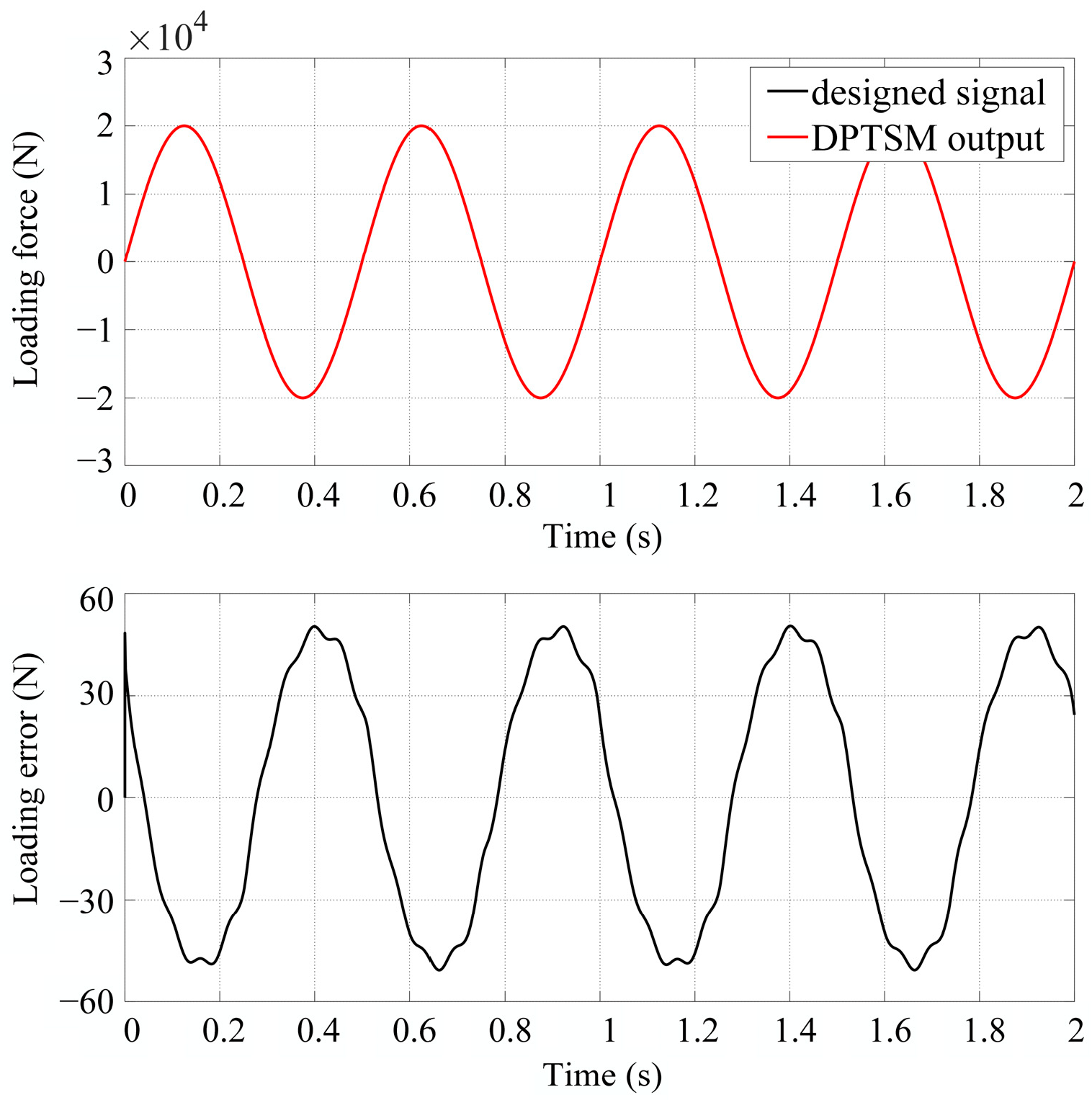
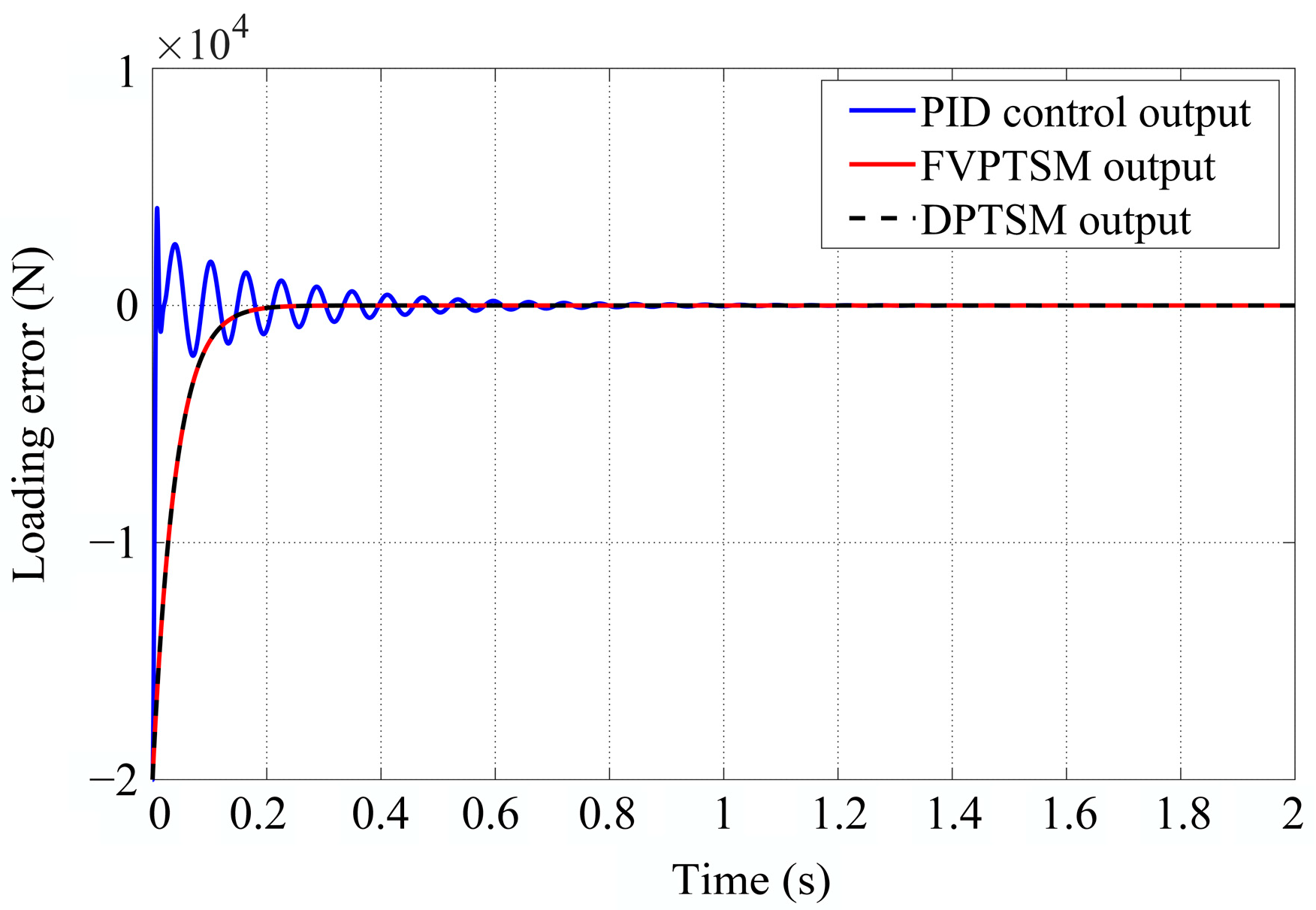
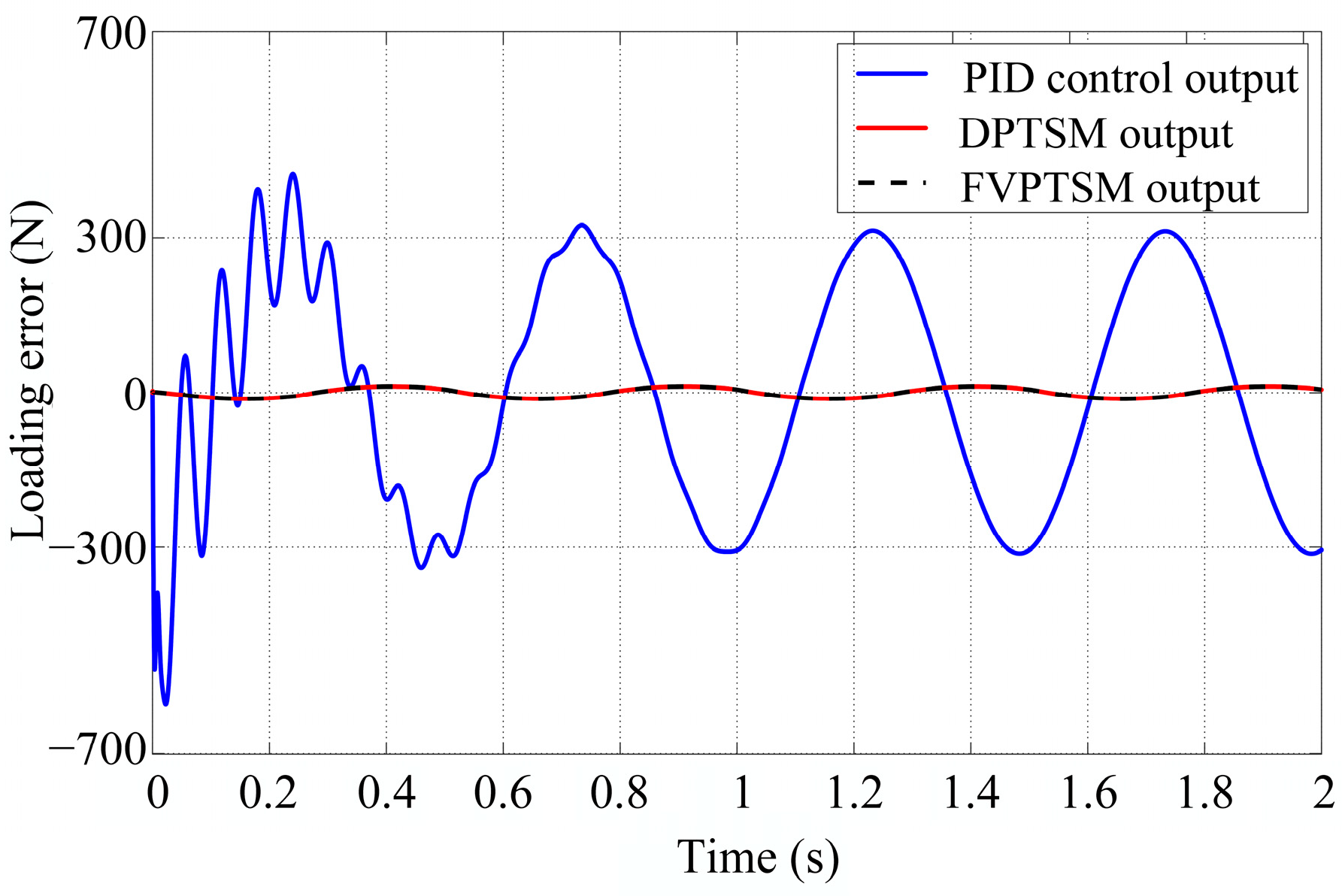
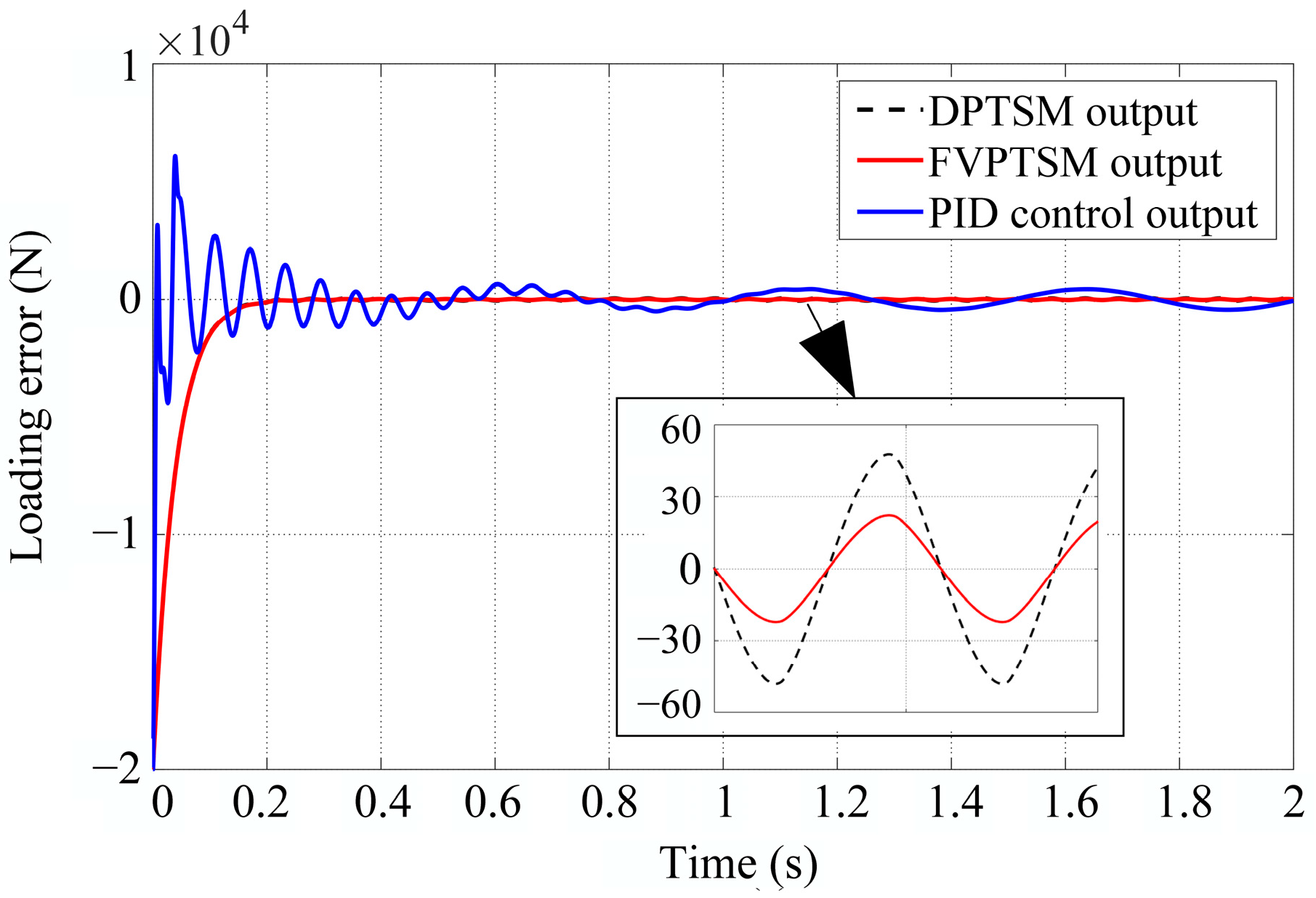
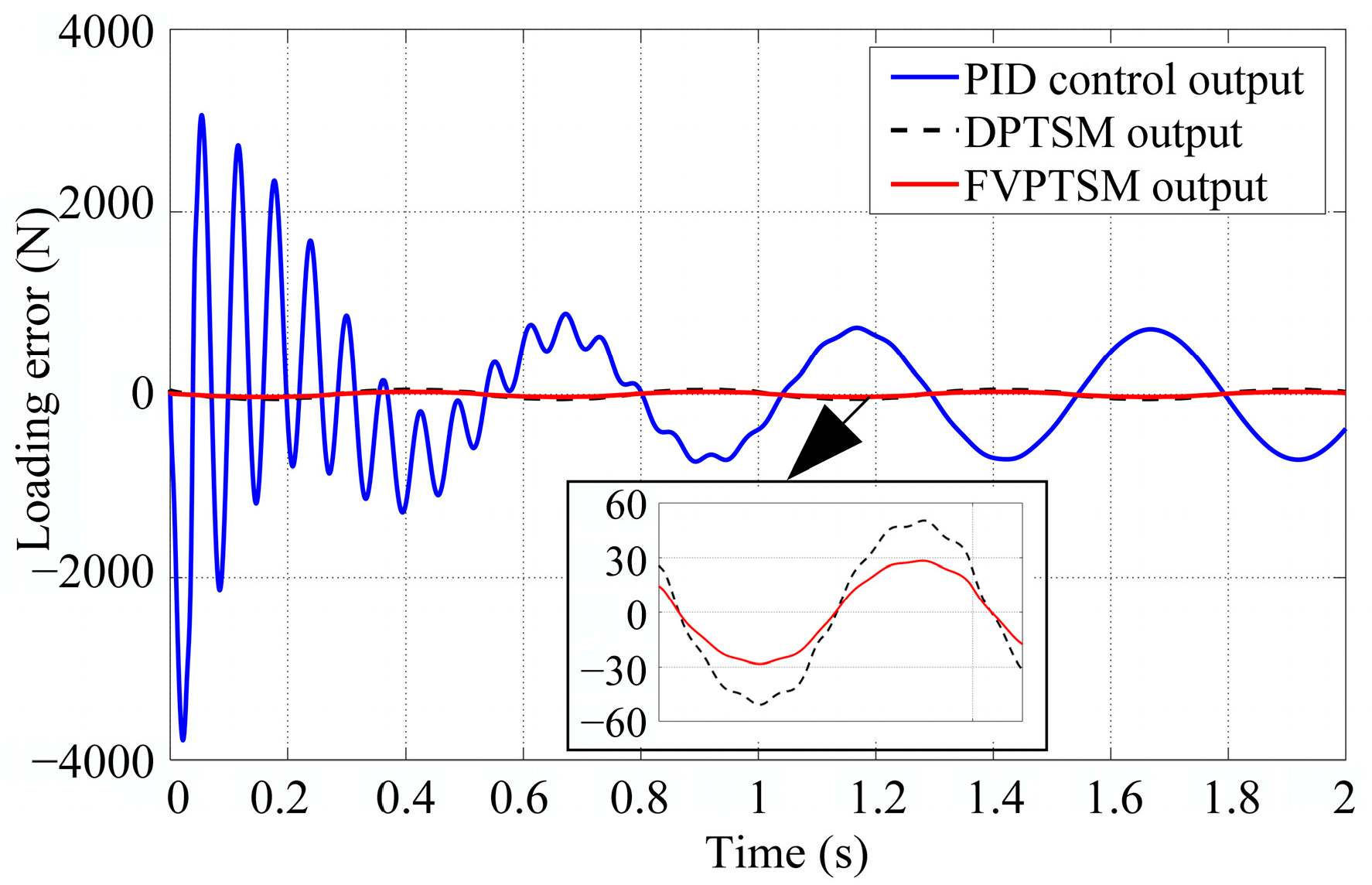
- The controllers of the FVPTSM, the derived double-power terminal sliding mode control (DPTSM), and the PID are designed for conducting a comparison of the simulation and experimental verification, and the results demonstrate the effectiveness of the proposed strategy.
2. System Introduction and Mathematical Model
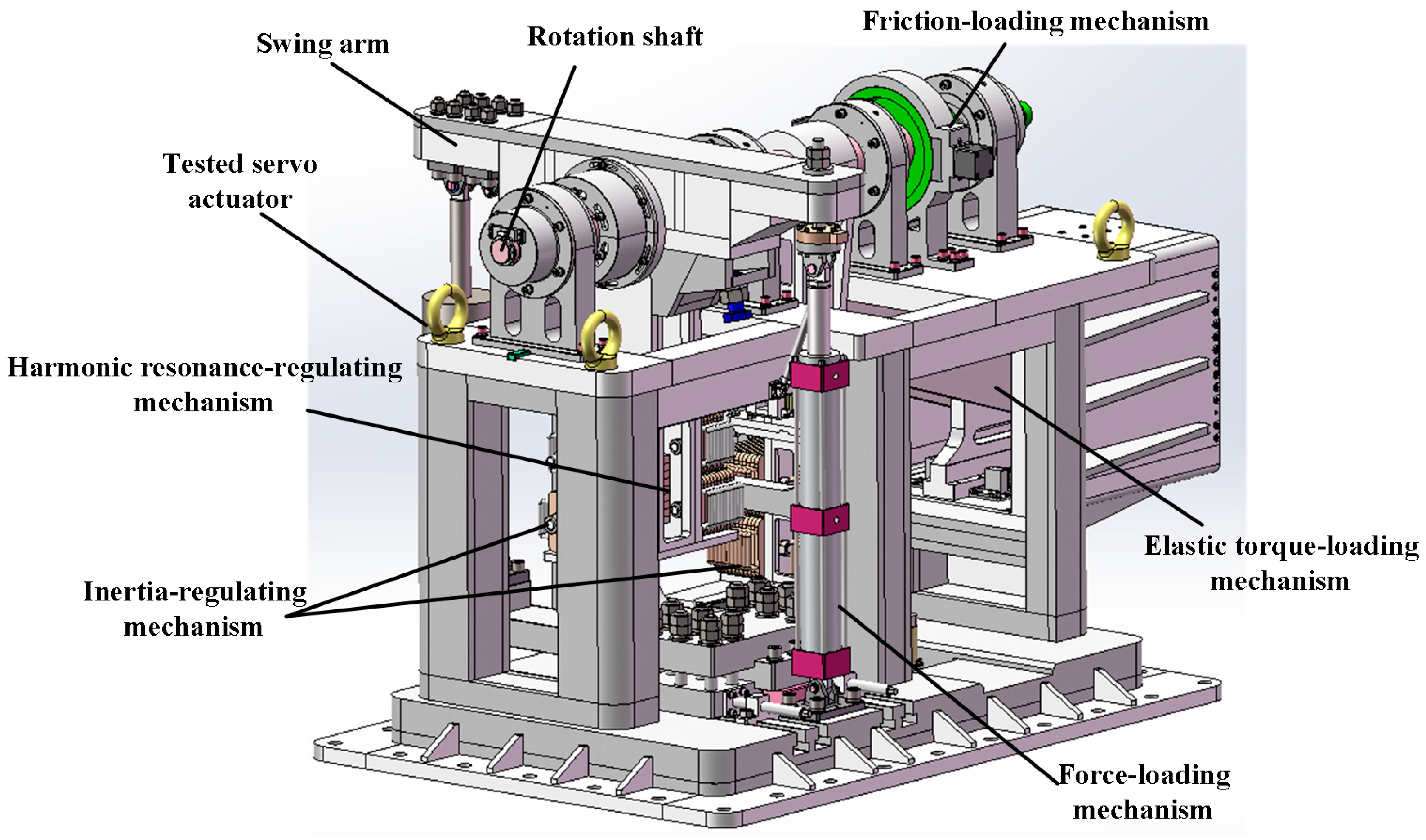
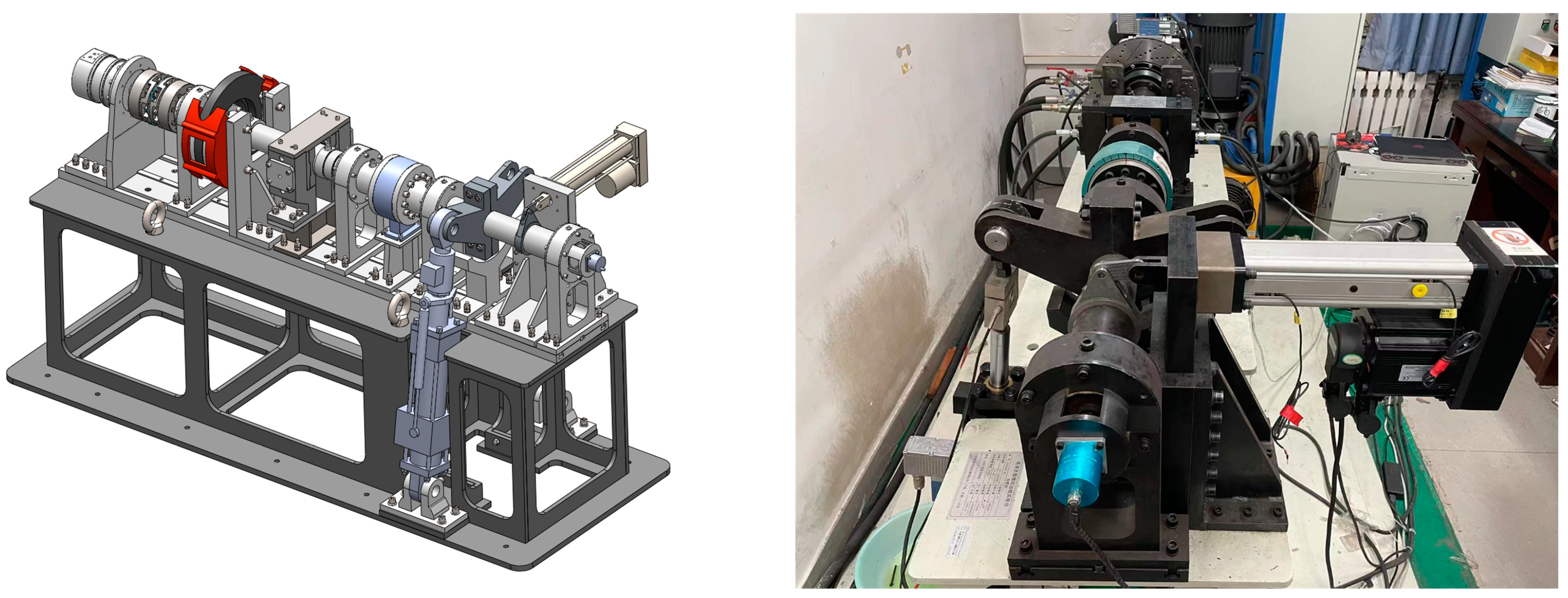
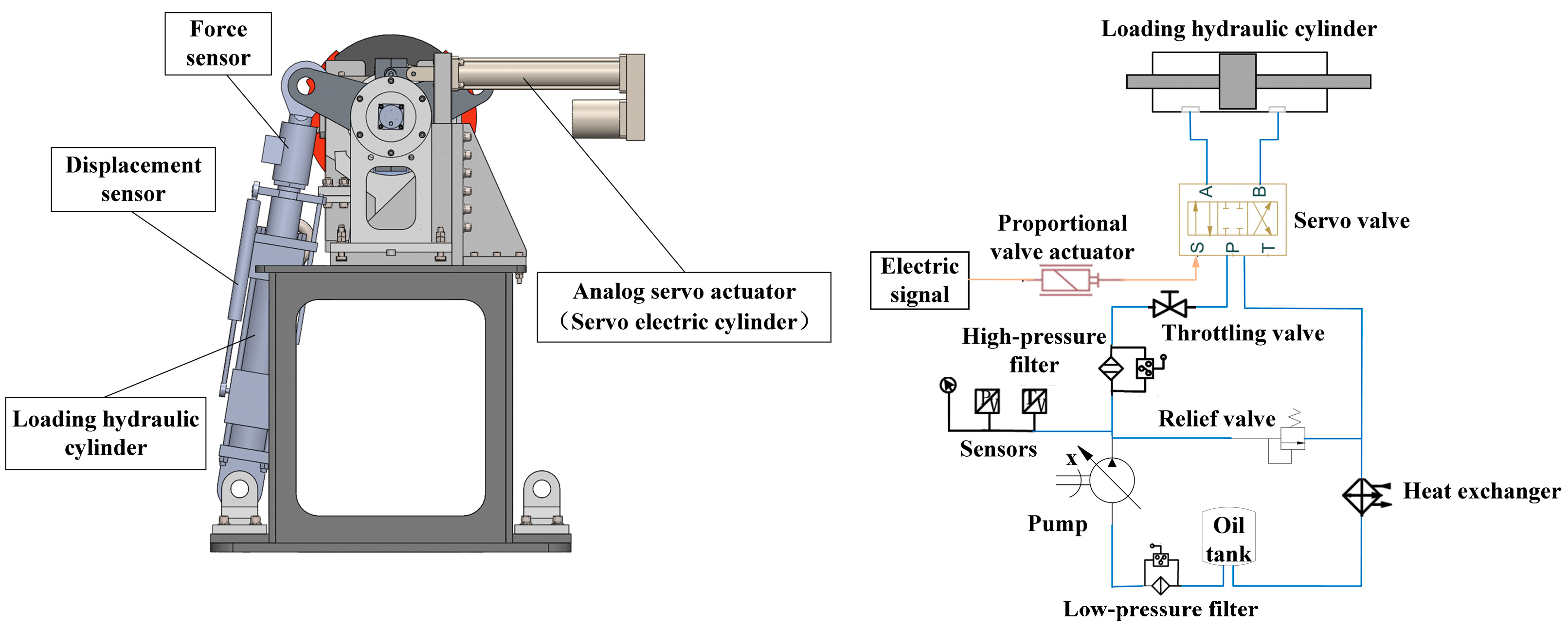
2.1. Mechanical Structure and Construction of the System
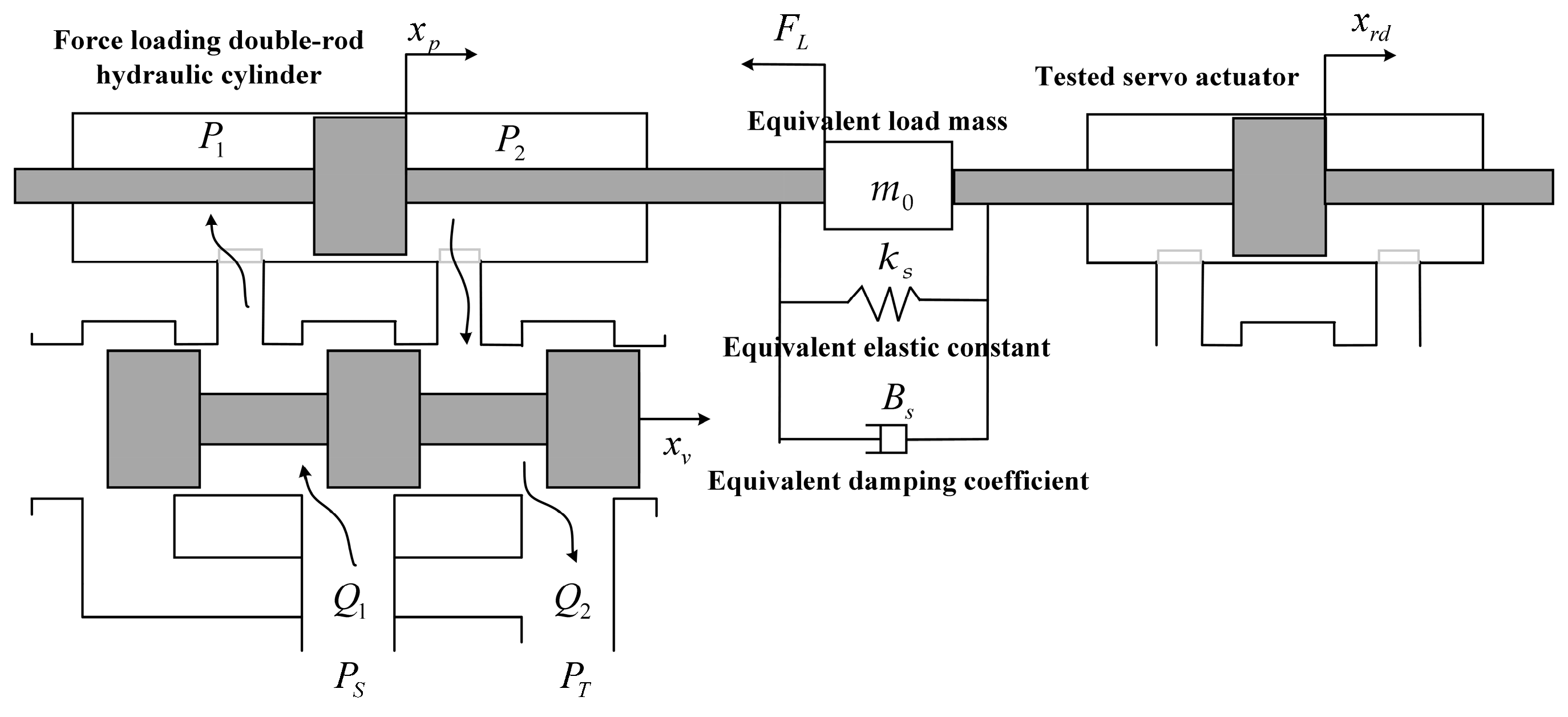
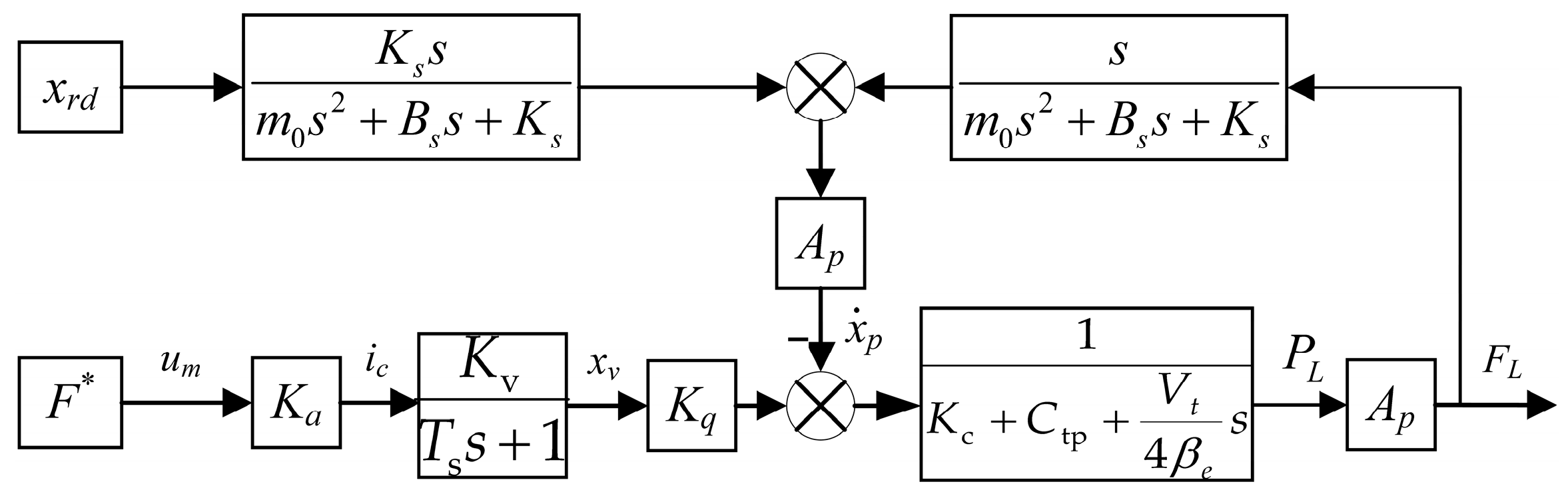
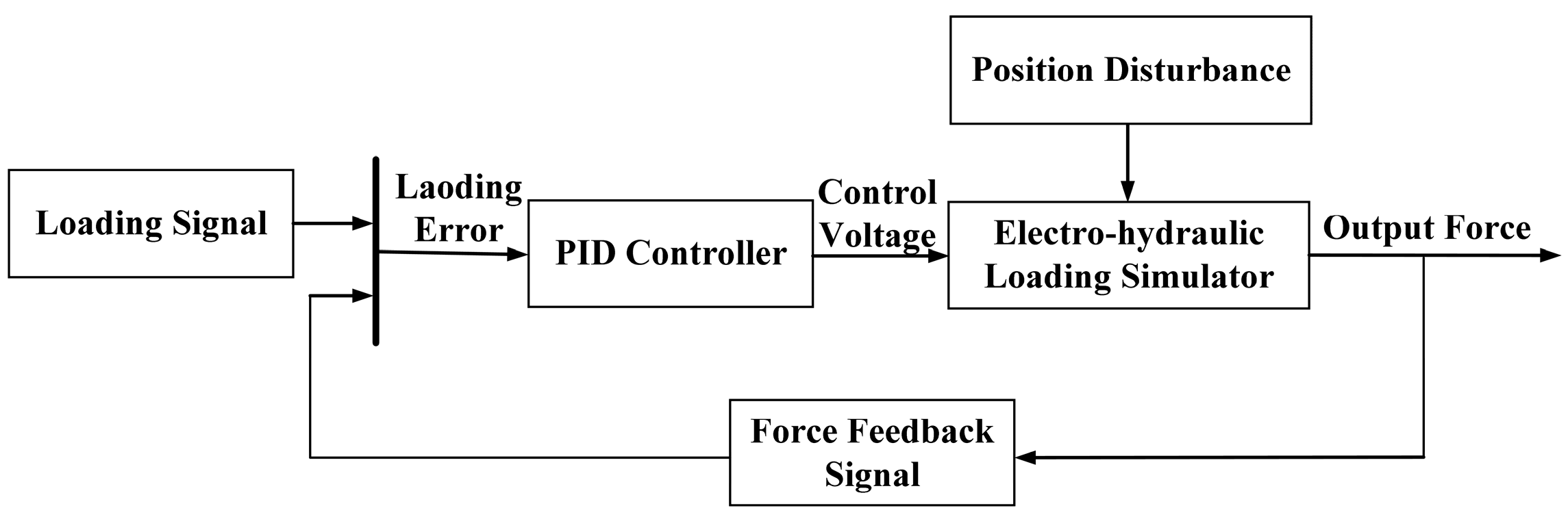
2.2. Mathematical Model of Force Loading System
- (1)
- The valve is a four-way spool valve with an ideal opening, where the four throttling windows are matched and symmetrical;
- (2)
- The flow at the throttling window is turbulent flow, and the influence of liquid compressibility in the valve can be neglected;
- (3)
- The valve has an ideal response capability, that is, the flow change corresponding to the change of spool displacement and valve pressure drop can occur instantaneously;
- (4)
- The hydraulic cylinder is the ideal double-rod symmetrical hydraulic cylinder;
- (5)
- The oil supply pressure is constant, and the oil return pressure is zero.
- (1)
- All connecting pipes are short and thick, and the friction loss, liquid quality, and dynamic properties of the oil circuit can be neglected;
- (2)
- The internal pressure of each chamber of the hydraulic cylinder is equal everywhere, and the oil temperature and volume elastic modulus can be considered to be constant;
- (3)
- The internal and external leakage of the hydraulic cylinder is in the form of laminar flow.
3. Proposal and Implementation of the Terminal Sliding Mode Control Strategy Based on the Modified Fast Double-Power Reaching Law
3.1. The State–Space Model of Force-Loading System
3.2. FVPTSM Controller Design
3.3. Finite-Time Proof and Stability Analysis
3.4. DPTSM Controller Design
4. Simulation and Experimental Verification
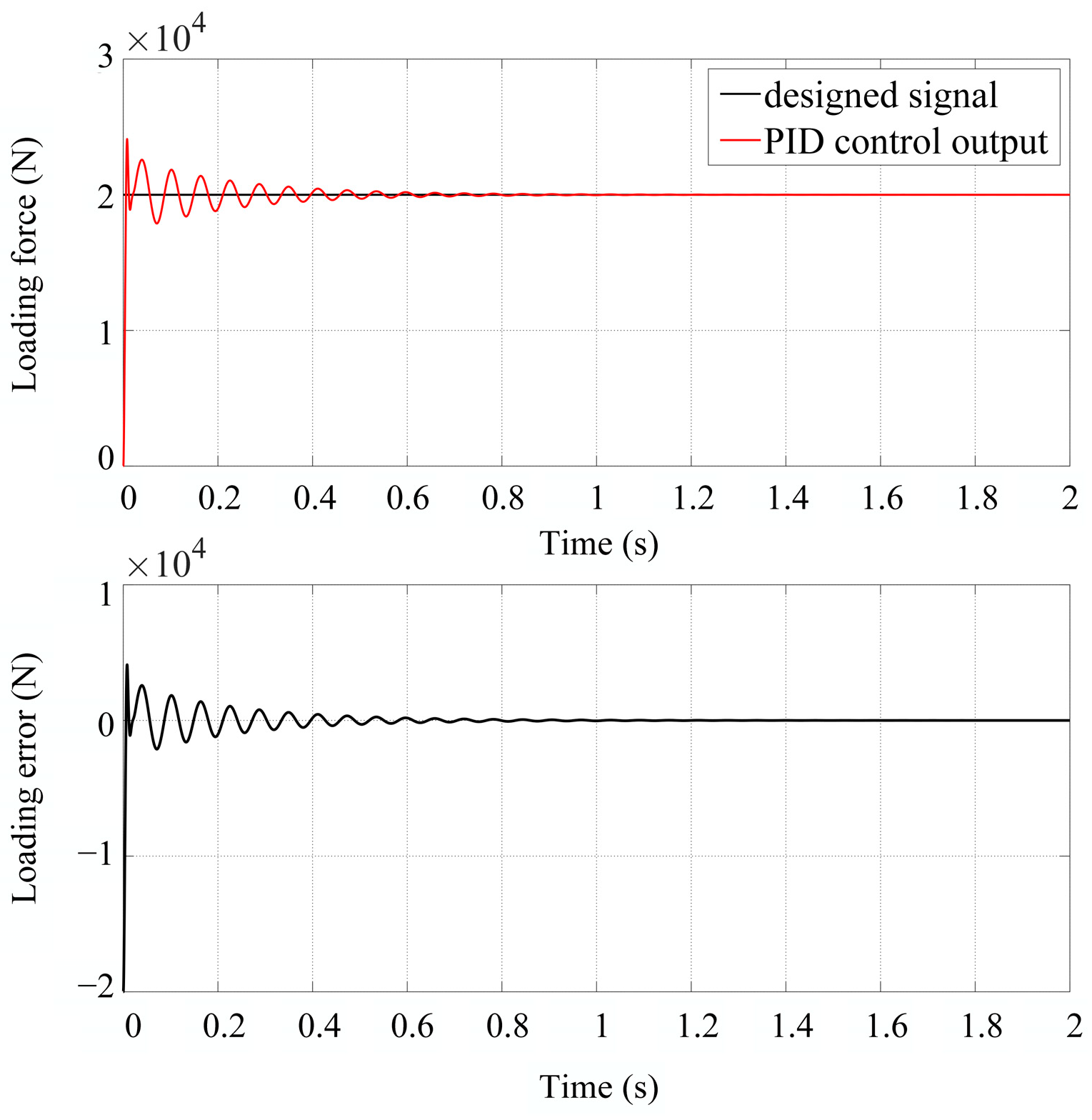
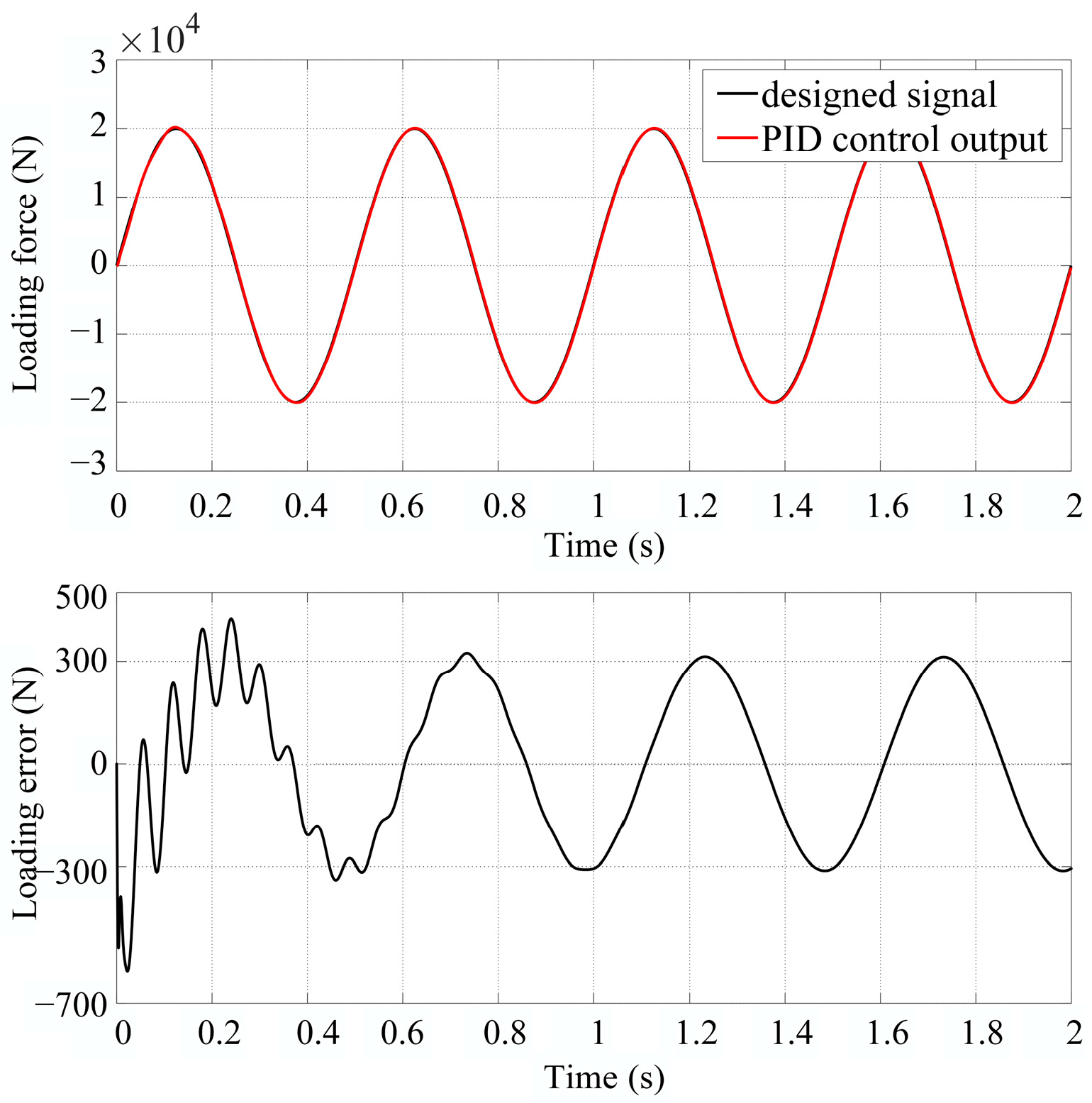
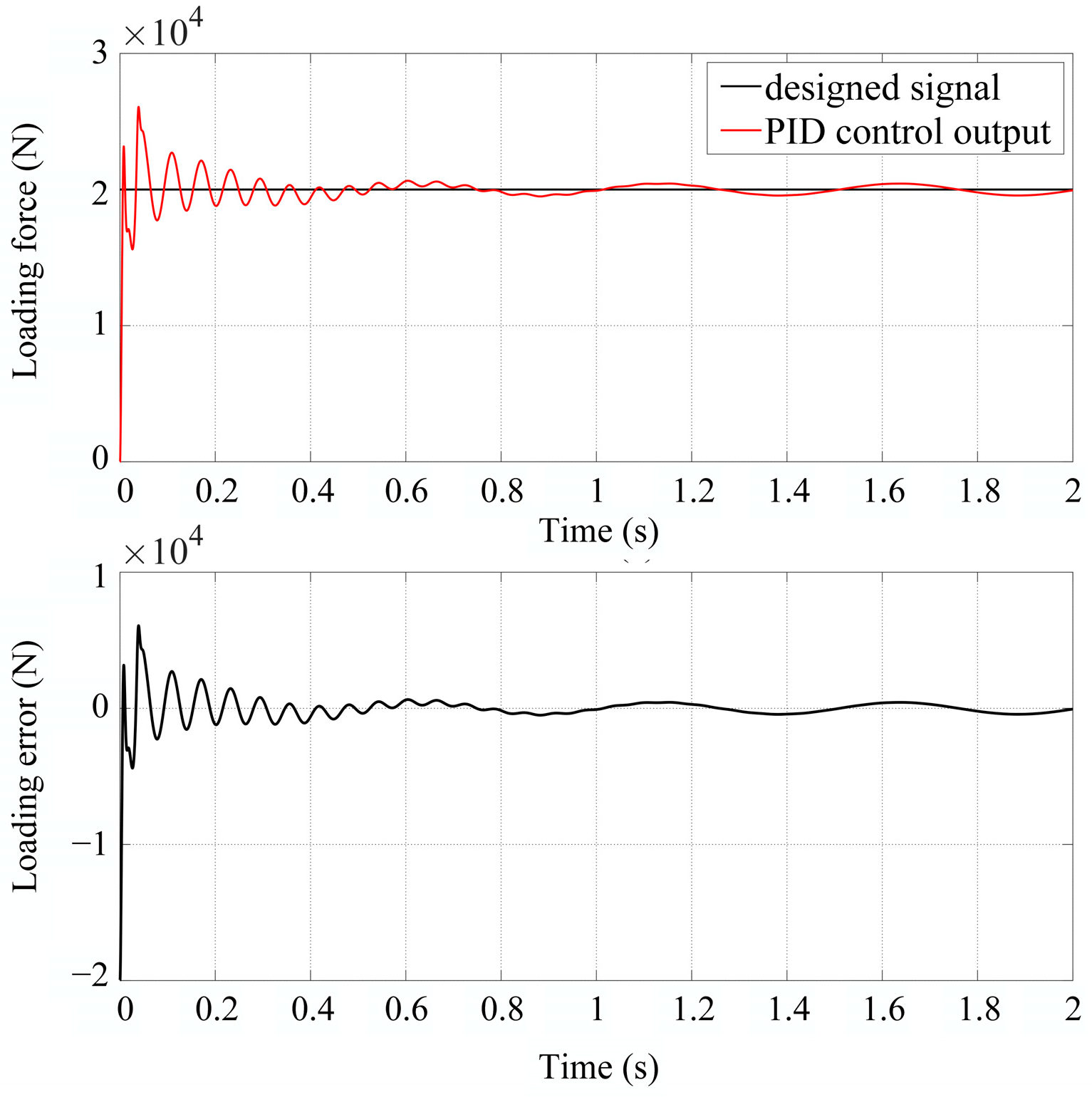
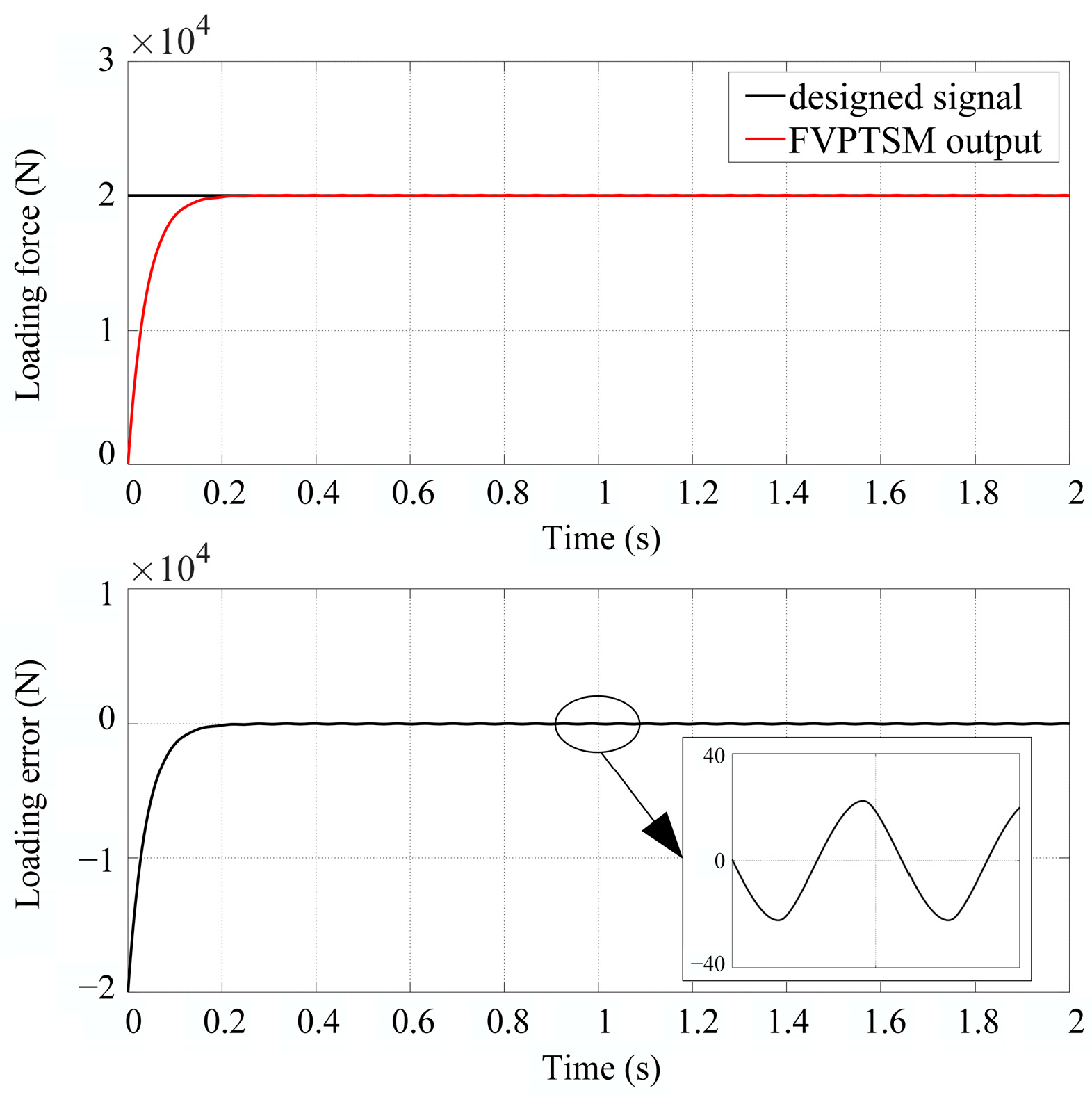
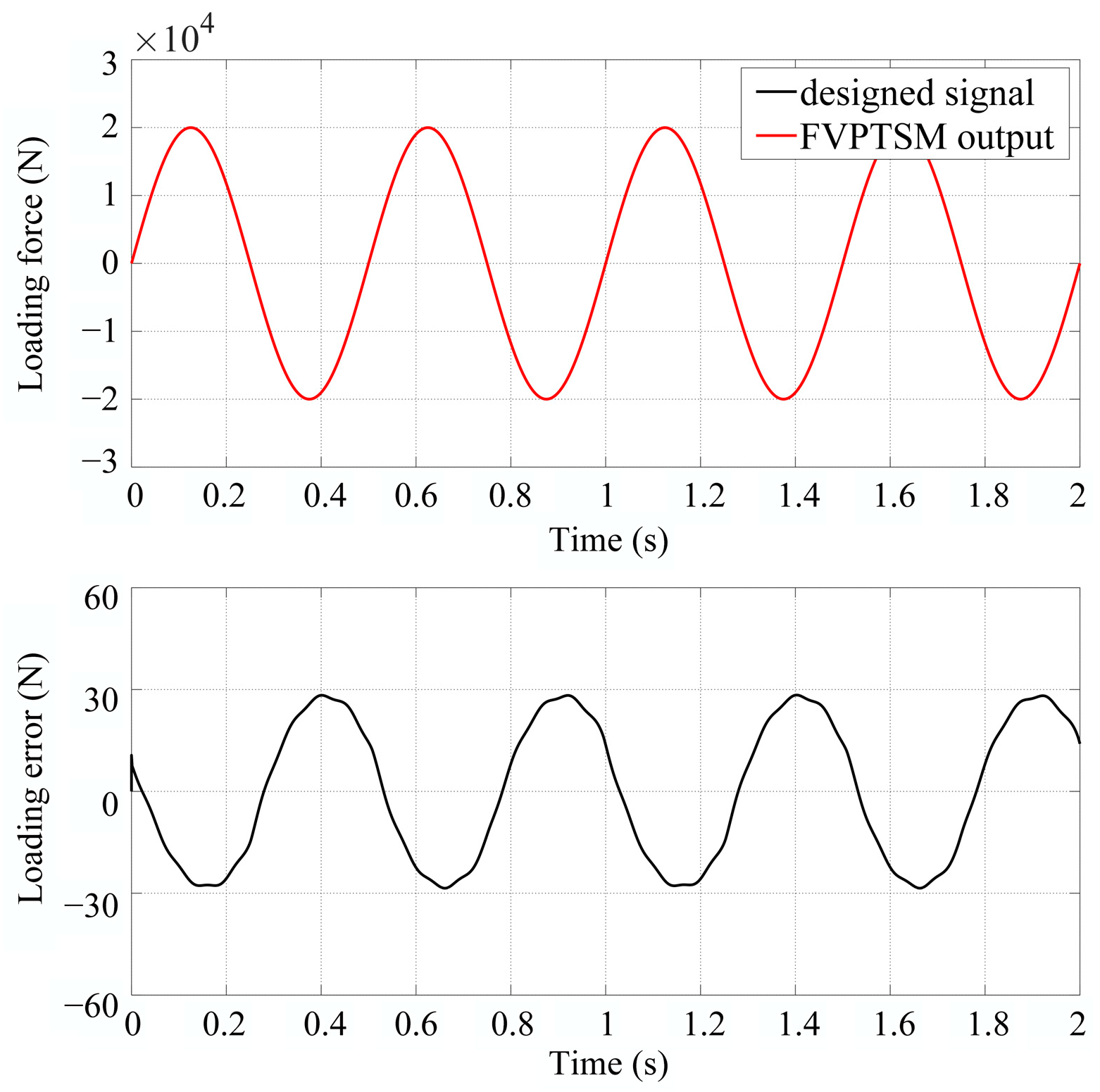
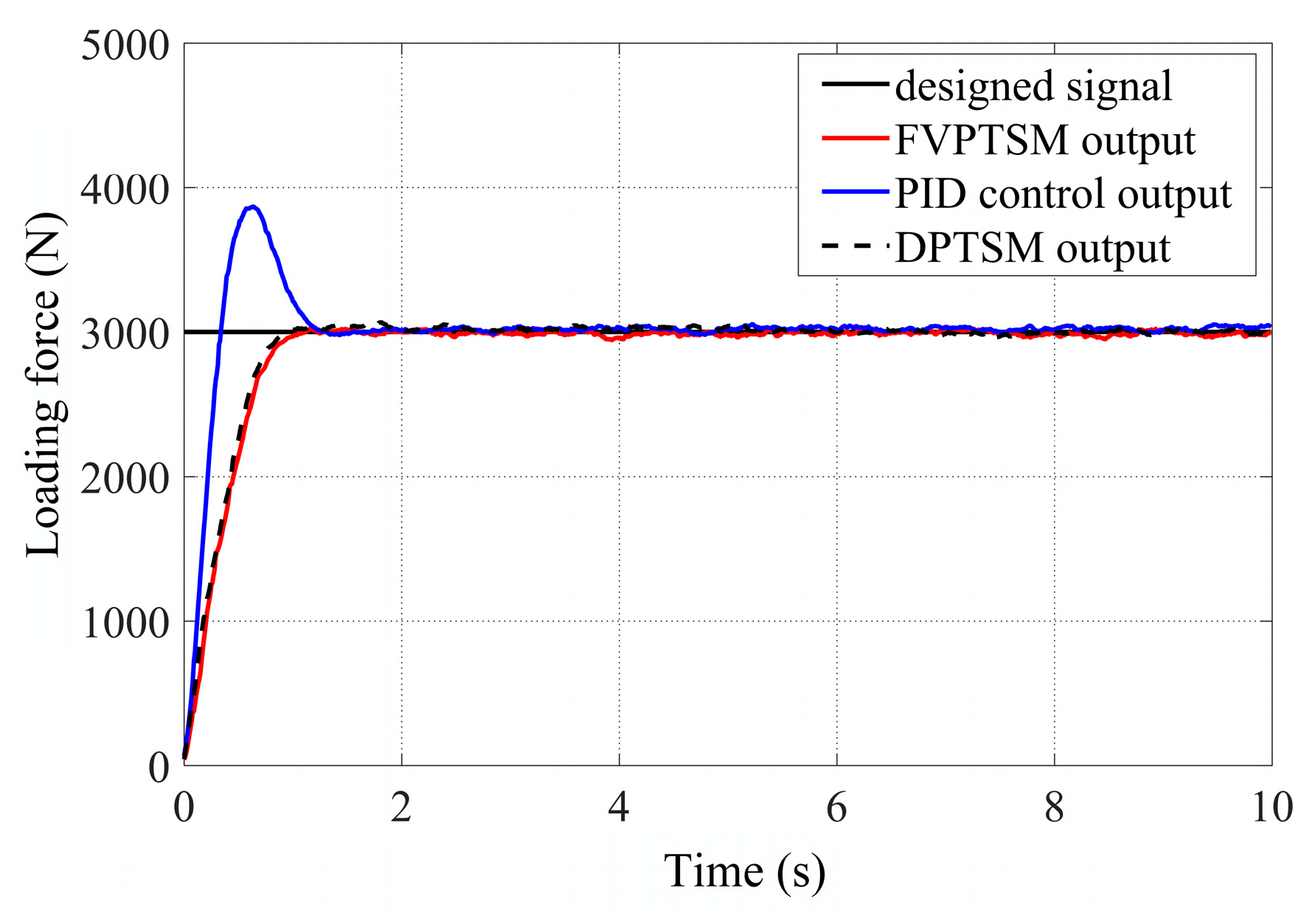
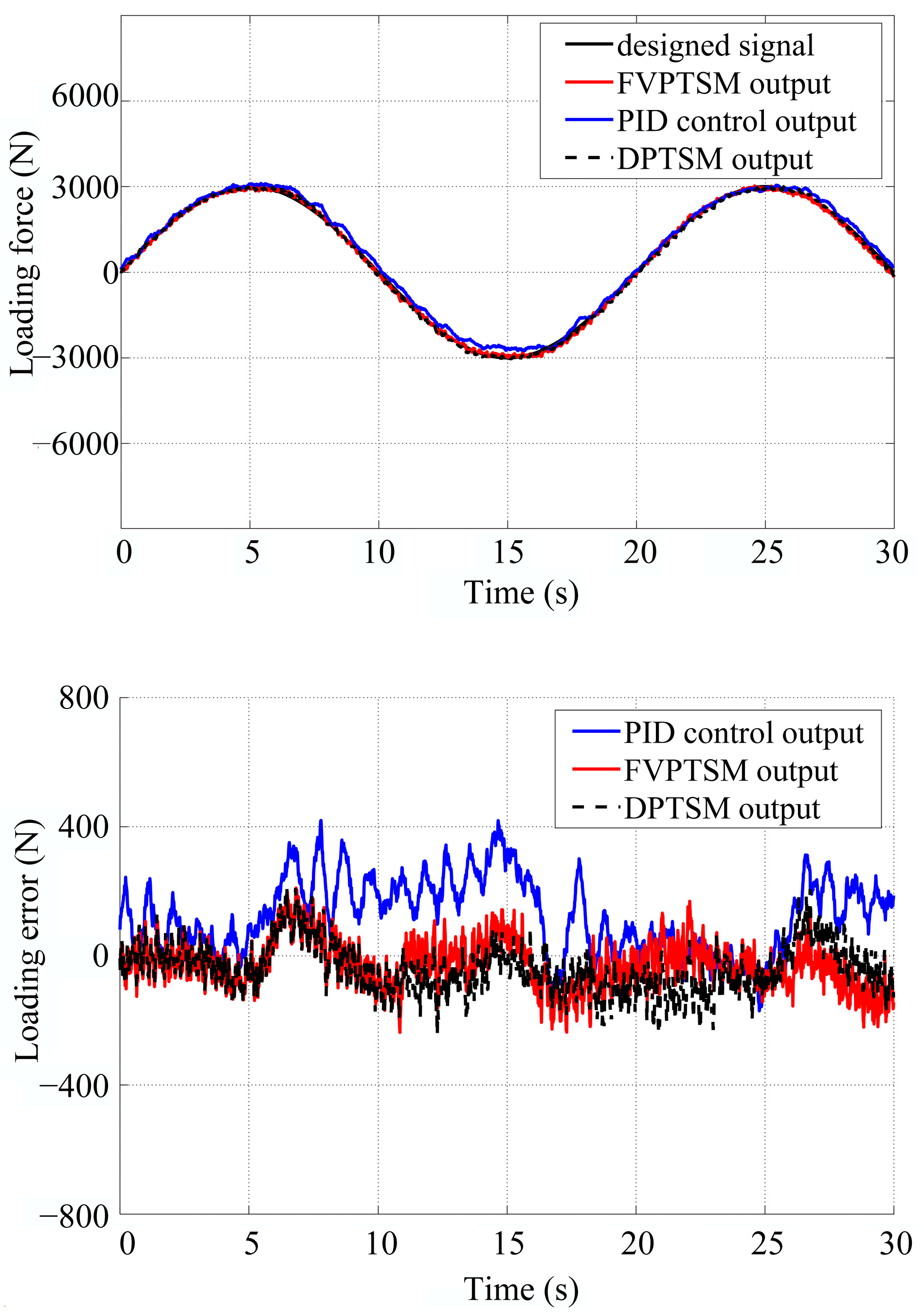
4.1. Simulation Verification
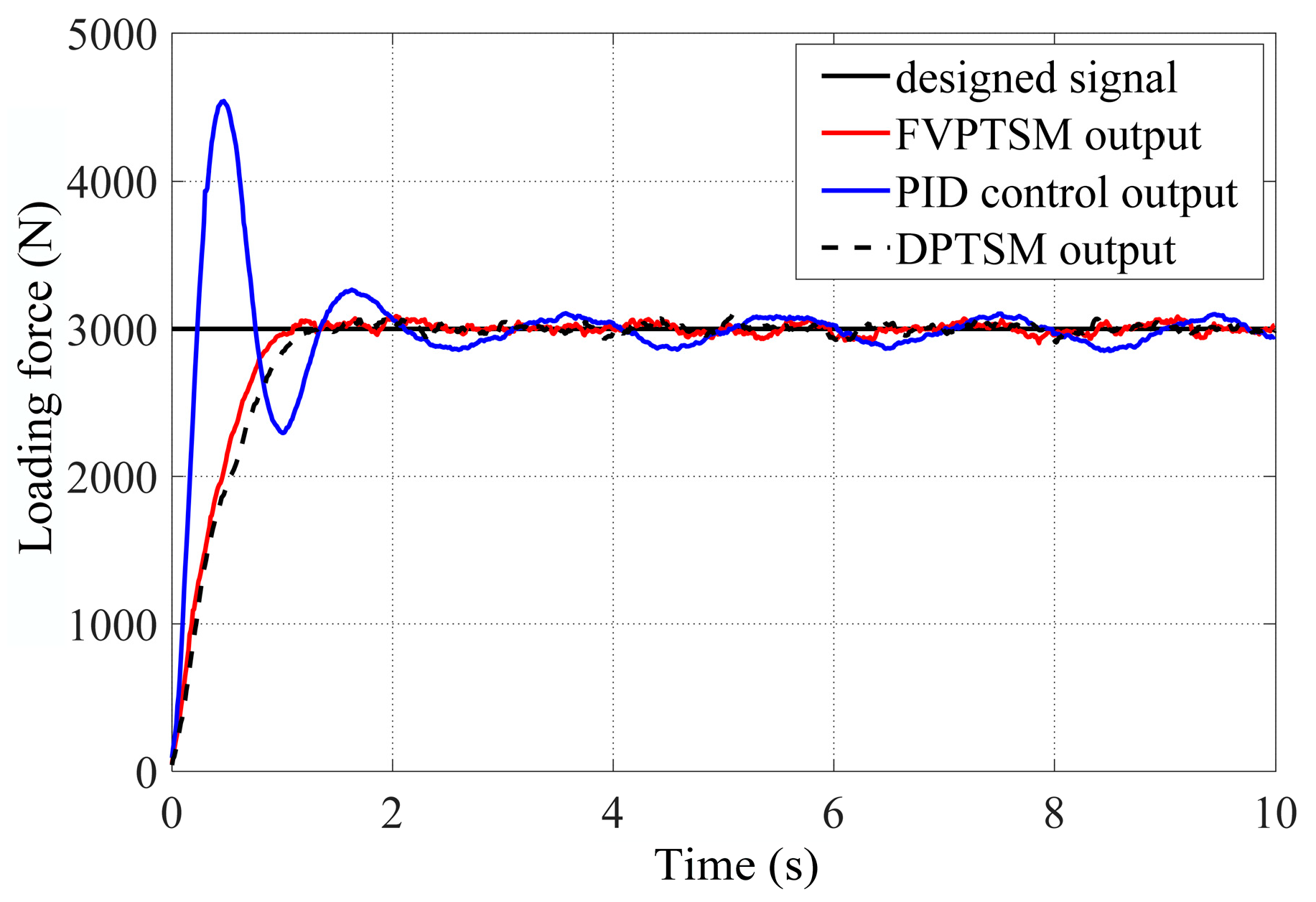
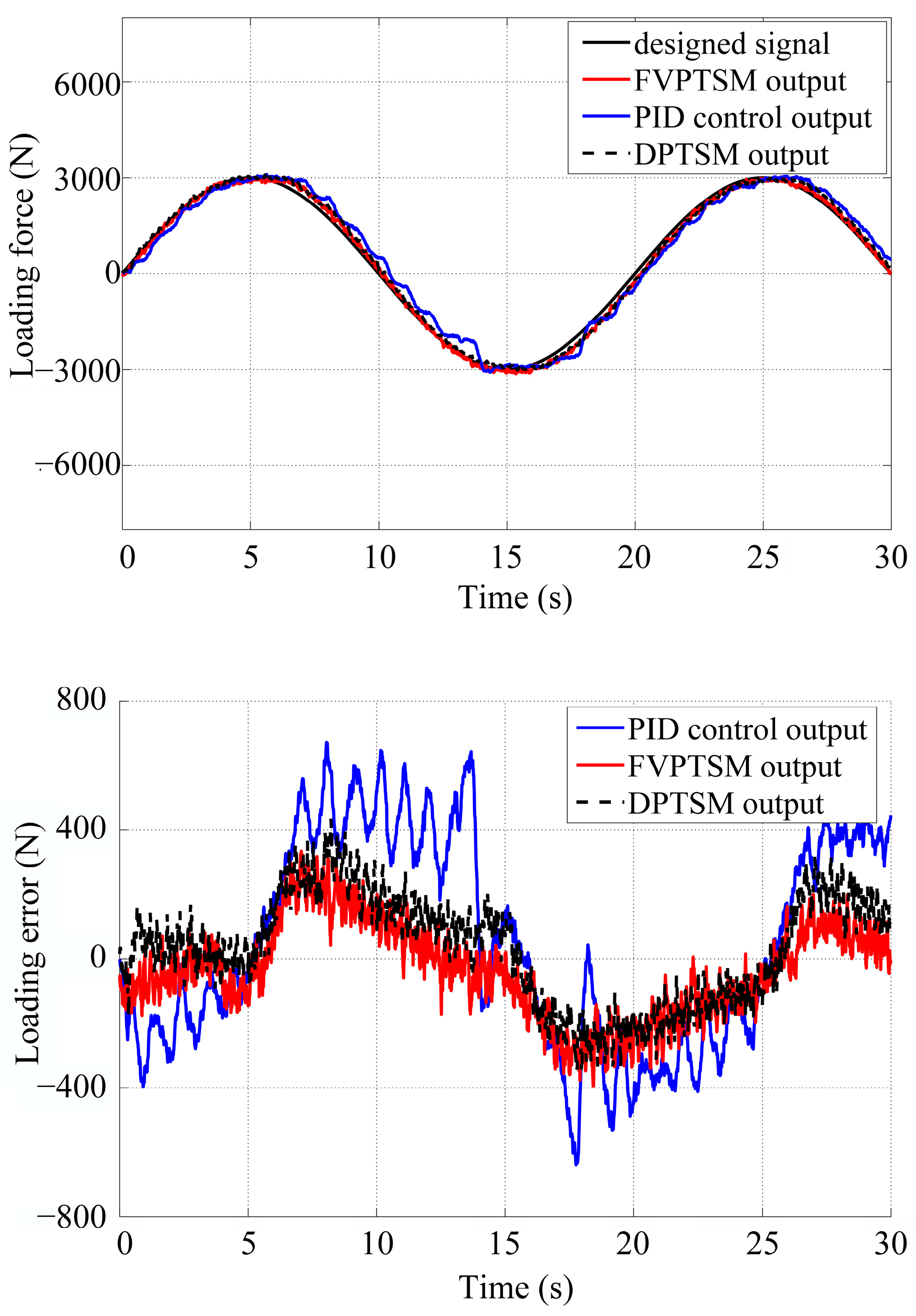
4.2. Experimental Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chengwen, W.; Zongxia, J.; Shuai, W.; Bihua, C. “Dual-Loop Control” of load simulator. In Proceedings of the IEEE 10th International Conference on Industrial Informatics, Beijing, China, 25–27 July 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 530–535. [Google Scholar]
- Truong, D.Q.; Ahn, K.K. Force control for hydraulic load simulator using self-tuning grey predictor—Fuzzy PID. Mechatronics 2009, 19, 233–246. [Google Scholar] [CrossRef]
- Asl, R.M.; Hagh, Y.S.; Simani, S.; Handroos, H. Adaptive square-root unscented Kalman filter: An experimental study of hydraulic actuator state estimation. Mech. Syst. Signal Process. 2019, 132, 670–691. [Google Scholar]
- Won, D.; Kim, W.; Tomizuka, M. Nonlinear control with high-gain extended state observer for position tracking of electro-hydraulic systems. IEEE/ASME Trans. Mechatron. 2020, 25, 2610–2621. [Google Scholar] [CrossRef]
- Jiang, W.; Zhang, C.; Jia, P.; Yan, G.; Ma, R.; Chen, G.; Ai, C.; Zhang, T. A Study on the Electro-Hydraulic Coupling Characteristics of an Electro-Hydraulic Servo Pump Control System. Processes 2022, 10, 1539. [Google Scholar] [CrossRef]
- Hao, J.J.; Zhao, K.D. A Design Method of Electro-Hydraulic Load Simulator based on Flexible spring connection. Chin. J. Mach. Tool Hydraul. 2001, 4, 59–106. [Google Scholar]
- Li, J.; Kong, L.; Liang, H.; Li, W.; Aldosary, S. Enhancing Electro-Hydraulic Load Simulator Performance through Variable Arm Length and Particle Swarm-Optimized Controllers. Nanoelectron. Optoe. 2023, 18, 1085–1099. [Google Scholar] [CrossRef]
- Hu, H.; Zhang, Q.; Fang, J.; Wang, T.; Wei, J. Practical adaptive robust tracking control of the dual-valve parallel electro-hydraulic servo system with reduced-order model. Trans. Inst. Meas. Contr. 2024, 46, 501–512. [Google Scholar] [CrossRef]
- Jianming, C.; Biao, Z.; Yanliang, D. A study on performance of electro-hydraulic load simulator based on pressure servo valve. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics (FPM), Harbin, China, 5–7 August 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 505–509. [Google Scholar]
- Matsui, T.; Mochizuki, Y. Effect of positive angular velocity feedback on torque control of hydraulic actuator. Trans. Jpn. Soc. Mech. Eng. 2008, 57, 1604–1609. [Google Scholar] [CrossRef]
- Jacazio, G.; Balossini, G. A Mechatronic Active Force Control System for Real Time Test Loading of an Aircraft Landing Gear. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, San Diego, CA, USA, 30 August–2 September 2009; pp. 11–18. [Google Scholar]
- Phan, V.D.; Trinh, H.A.; Ahn, K.K. Backstepping Control of an Electro-Hydraulic Actuator using Kalman Filter. In Proceedings of the 2023 26th International Conference on Mechatronics Technology (ICMT), Busan, Republic of Korea, 18–21 October 2023; IEEE: Piscataway, NJ, USA, 2012; pp. 1–5. [Google Scholar]
- Truong, H.V.A.; Nam, S.; Kim, S.; Kim, Y.; Chung, W.K. Backstepping-Sliding-Mode-Based Neural Network Control for Electro-Hydraulic Actuator Subject to Completely Unknown System Dynamics. IEEE Trans. Autom. Sci. Eng. 2023, 1–25. [Google Scholar] [CrossRef]
- Naveen, C.; Meenakshipriya, B.; Sathiyavathi, S. Design and Implementation of Iterative Learning Control for an Electro-Hydraulic Servo System. J. Sci. Ind. Res. 2023, 82, 579–588. [Google Scholar]
- Phan, V.D.; Ahn, K.K. Fault-tolerant control for an electro-hydraulic servo system with sensor fault compensation and disturbance rejection. Nonlinear Dynam. 2023, 111, 10131–10146. [Google Scholar] [CrossRef]
- Nahian, S.A.; Dinh, T.Q.; Dao, H.V.; Ahn, K.K. An unknown input observer—EFIR combined estimator for electrohydraulic actuator in sensor fault-tolerant control application. IEEE/ASME Trans. Mechatron. 2020, 25, 2208–2219. [Google Scholar] [CrossRef]
- Vyas, J.; Rengasamy, A.; Narayanan, L.S.; Gopalsamy, B. Theoretical and Experimental Investigation of Friction in Hydraulic Actuators. In Machines, Mechanism and Robotics, Proceedings of the iNaCoMM 2019, Mandi, Himachal Pradesh, India, 5–7 December 2019; Springer: Singapore, 2022; Volume 2, pp. 421–427. [Google Scholar] [CrossRef]
- Zhang, W.; Ping, Z.; Fu, Y.; Zheng, S.; Zhang, P. Observer-Based Backstepping Adaptive Force Control of Electro-Mechanical Actuator with Improved LuGre Friction Model. Aerospace 2022, 9, 415. [Google Scholar] [CrossRef]
- Kang, S.; Yan, H.; Dong, L.; Li, C. Finite-time adaptive sliding mode force control for electro-hydraulic load simulator based on improved GMS friction model. Mech. Syst. Signal Process. 2018, 102, 117–138. [Google Scholar] [CrossRef]
- Min, H.K.; Sung, H.J.; Lee, J.H.; Park, M.K. Robust control of electro-hydraulic load simulator using sliding mode control with Perturbation Estimation. In Proceedings of the 2017 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, Republic of Korea, 18–21 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1137–1141. [Google Scholar]
- Nahian, S.A.; Truong, D.Q.; Chowdhury, P. Modeling and fault-tolerant control of an electro-hydraulic actuator. Int. J. Precis. Eng. Manuf. 2016, 17, 1285–1297. [Google Scholar] [CrossRef]
- Huang, J.; Song, Z.; Wu, J.; Guo, H.; Qiu, C.; Tan, Q. Parameter Adaptive Sliding Mode Force Control for Aerospace Electro-Hydraulic Load Simulator. Aerospace 2023, 10, 160. [Google Scholar] [CrossRef]
- Kang, S.; Nagamune, R.; Yan, H. Almost disturbance decoupling force control for the electro-hydraulic load simulator with mechanical backlash. Mech. Syst. Signal Process. 2020, 135, 106400. [Google Scholar] [CrossRef]
- Yu, W.; Yu, X.; Wang, H. Sliding modes: From asymptoticity, to finite time and fixed time. Sci. China Inf. Sci. 2023, 66, 190205. [Google Scholar] [CrossRef]
- Moulay, E.; Léchappé, V.; Bernuau, E.; Defoort, M.; Plestan, F. Fixed-time sliding mode control with mismatched disturbances. Automatica 2022, 136, 110009. [Google Scholar] [CrossRef]
- Moulay, E.; Léchappé, V.; Bernuau, E.; Plestan, F. Robust fixed-time stability: Application to sliding-mode control. IEEE Trans. Autom. Control 2021, 67, 1061–1066. [Google Scholar] [CrossRef]
- Yu, X.; Feng, Y.; Man, Z. Terminal sliding mode control—An overview. IEEE Open J. Ind. Electron. Soc. 2020, 2, 36–52. [Google Scholar] [CrossRef]
- Yu, X.; Zhihong, M. Fast terminal sliding-mode control design for nonlinear dynamical systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2002, 49, 261–264. [Google Scholar]
- Tong, X.; Zhao, H.; Feng, G. Adaptive global terminal sliding mode control for anti-warship missiles. In Proceedings of the 2006 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1962–1966. [Google Scholar]
- Moghaddam, R.K.; Mohamadie, N.K. Fast terminal nonsingular sliding mode control of wave energy converters for maximum power absorption. Ocean Eng. 2023, 281, 114473. [Google Scholar] [CrossRef]
- Kardehi Moghaddam, R.; Baratpoor, J. Fuzzy Adaptive Nonsingular Terminal Sliding Mode Control of a Miniature Helicopter. J. Aerosp. Infor. Syst. 2024, 21, 140–151. [Google Scholar] [CrossRef]
- Alnufaie, L. Nonsingular fast terminal sliding mode controller for a robotic system: A fuzzy approach. Eng, Tech. Applied Sci. Research 2023, 13, 11667–11671. [Google Scholar] [CrossRef]
- Dong, R.Q.; Qi, W.N.; Lyu, X. Singularity-Free Fixed-time Sliding Mode Control for A Class of Nonlinear Systems. Aerosp. Sci. Technol. 2024, 146, 108952. [Google Scholar] [CrossRef]
- Kasera, S.; Kumar, A.; Prasad, L.B. Analysis of chattering free improved sliding mode control. In Proceedings of the 2017 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, 17–18 March 2017; IEEE: Piscataway, NJ, USA, 2012; pp. 1–6. [Google Scholar]
- Young, K.D.; Utkin, V.I.; Ozguner, U. A control engineer’s guide to sliding mode control. IEEE Trans. Control Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef]
- Liu, S.Q.; Whidborne, J.F.; zhi Lyv, W.; Zhang, Q. Observer based incremental backstepping terminal sliding-mode control with learning rate for a multi-vectored propeller airship. Aerosp. Sci. Technol. 2023, 140, 108490. [Google Scholar] [CrossRef]
- Huang, S.; Jiang, J.; Li, O. Adaptive Neural Network-Based Sliding Mode Backstepping Control for Near-Space Morphing Vehicle. Aerospace 2023, 10, 891. [Google Scholar] [CrossRef]
- Wati, D.A.R. Performance evaluation of swarm intelligence on model-based PID tuning. In Proceedings of the 2013 IEEE International Conference on Computational Intelligence and Cybernetics, (CYBERNETICSCOM), Yogyakarta, Indonesia, 3–4 December 2013; IEEE: Piscataway, NJ, USA, 2017; pp. 40–44. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal Type | Amplitude | Frequency (Hz) |
|---|---|---|
| Step loading signal | 20,000 N | - |
| Sine loading signal | 20,000 N | 2 |
| Sine position disturbance | 30 mm | 2 |
| Signal Type | Amplitude | Frequency (Hz) |
|---|---|---|
| Hydraulic supply | Customized | System pressure: 25 MPa Max flow rate: 40 L/min |
| Loading hydraulic cylinder | SFG-50-36-260 | Rated pressure: 25 MPa Max output force: 50,000 N |
| Servo valve | D633-313B | Rated flow: 40 L/min |
| Force sensor | CYB-602S-5T | Range: 0~50,000 N Accuracy: 0.1% FS |
| Displacement sensor | Magnetostrictive displacement sensor | Range: 0~270 mm Accuracy: 0.005% FS |
| Data acquisition card | USB1902 | Voltage acquisition channels: 16 |
| Linear electric cylinder | FDR075 | Stroke: ±50 mm Max output force: 10,000 N |
| Servo driver | SV-DA200 | AC380V pulse I/O control |
| Signal Type | Amplitude | Frequency (Hz) |
|---|---|---|
| Step loading signal | 3000 N | - |
| Sine loading signal | 3000 N | 0.05 |
| Sine position disturbance | 10 mm | 0.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Qiu, C.; Huang, J.; Tan, Q.; Sun, S.; Gong, Z. Terminal Sliding Mode Force Control Based on Modified Fast Double-Power Reaching Law for Aerospace Electro-Hydraulic Load Simulator of Large Loads. Actuators 2024, 13, 145. https://doi.org/10.3390/act13040145
Zhao Y, Qiu C, Huang J, Tan Q, Sun S, Gong Z. Terminal Sliding Mode Force Control Based on Modified Fast Double-Power Reaching Law for Aerospace Electro-Hydraulic Load Simulator of Large Loads. Actuators. 2024; 13(4):145. https://doi.org/10.3390/act13040145
Chicago/Turabian StyleZhao, Yingna, Cheng Qiu, Jing Huang, Qifan Tan, Shuo Sun, and Zheng Gong. 2024. "Terminal Sliding Mode Force Control Based on Modified Fast Double-Power Reaching Law for Aerospace Electro-Hydraulic Load Simulator of Large Loads" Actuators 13, no. 4: 145. https://doi.org/10.3390/act13040145
APA StyleZhao, Y., Qiu, C., Huang, J., Tan, Q., Sun, S., & Gong, Z. (2024). Terminal Sliding Mode Force Control Based on Modified Fast Double-Power Reaching Law for Aerospace Electro-Hydraulic Load Simulator of Large Loads. Actuators, 13(4), 145. https://doi.org/10.3390/act13040145