
Eco-Driving on Hilly Roads in a Mixed Traffic Environment: A Model Predictive Control Approach

 ,
,  , ,
, , 
Abstract
1. Introduction
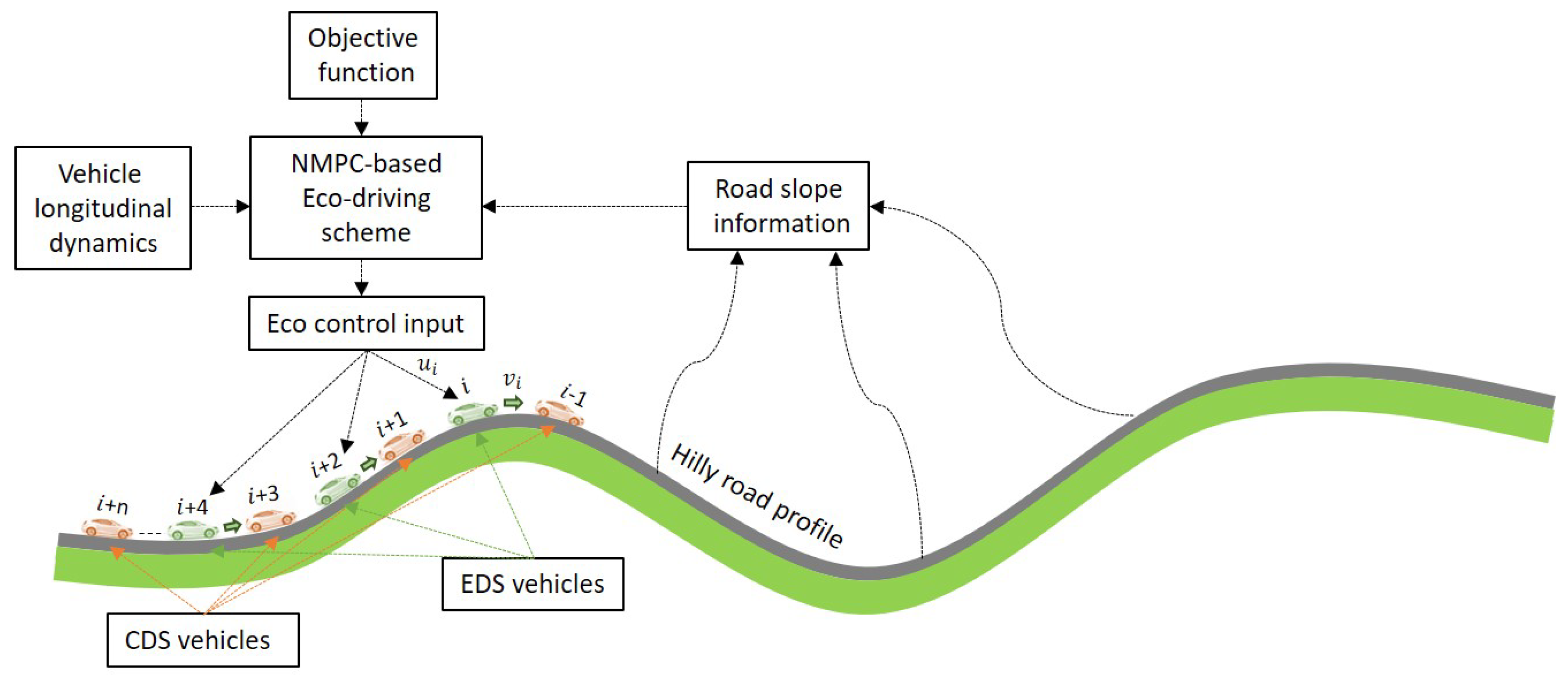
2. Eco-Driving on Hilly Roads
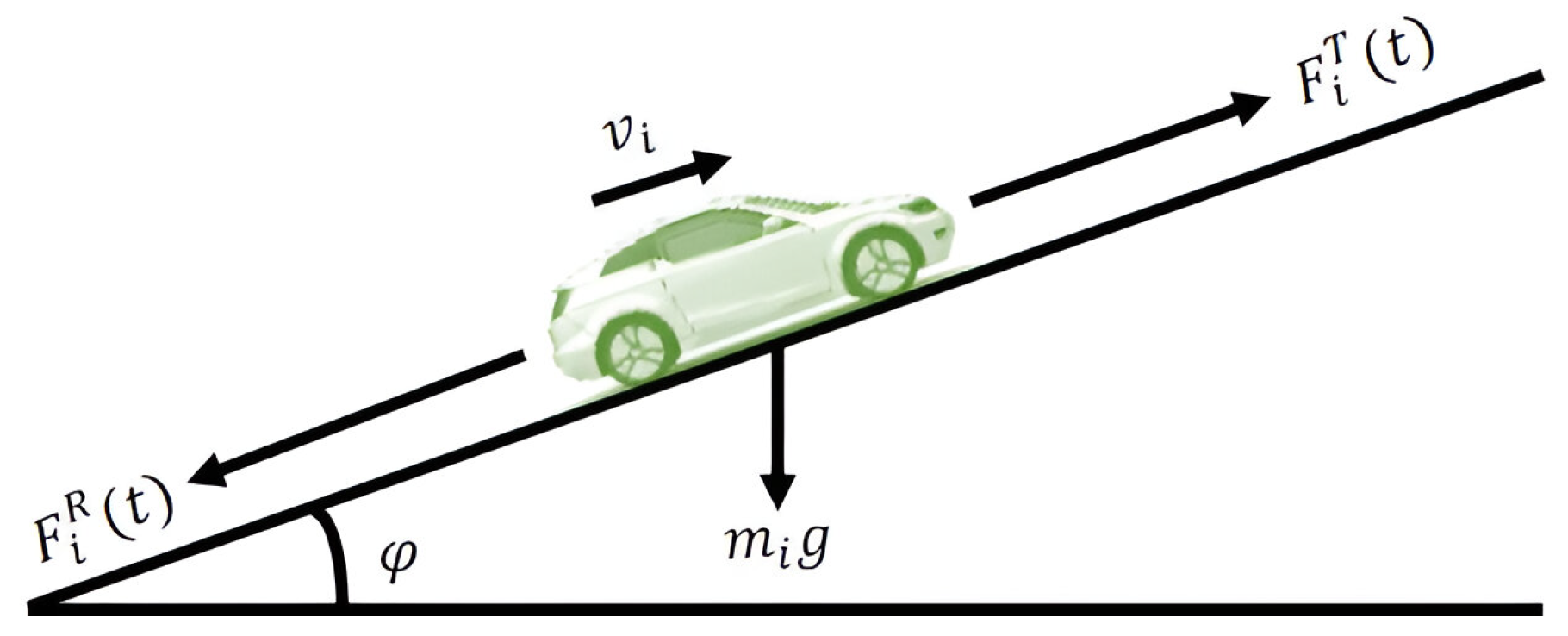
2.1. Vehicle Dynamics Model
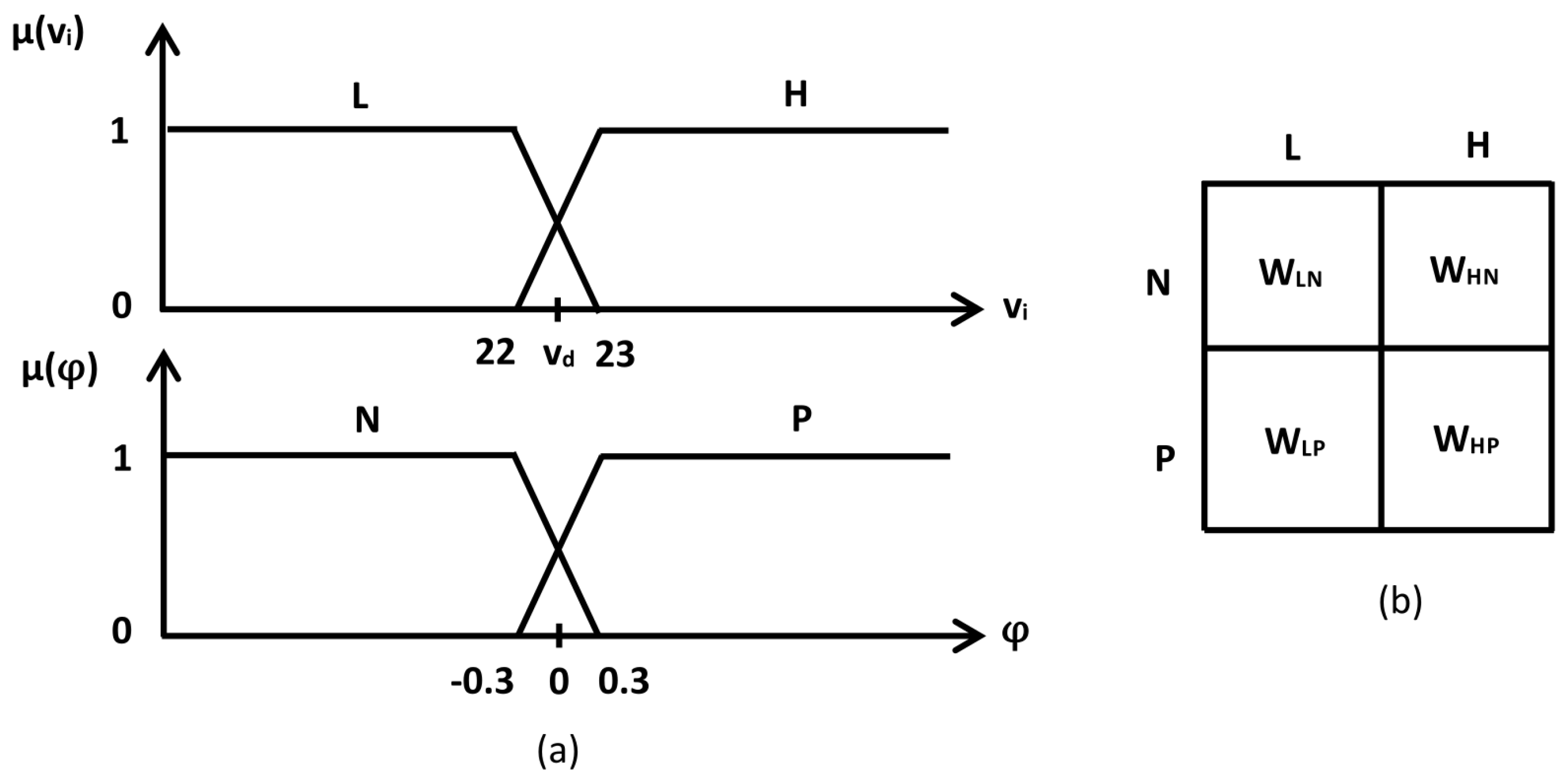
2.2. Nonlinear Model Predictive Control
3. Simulation Results and Discussion
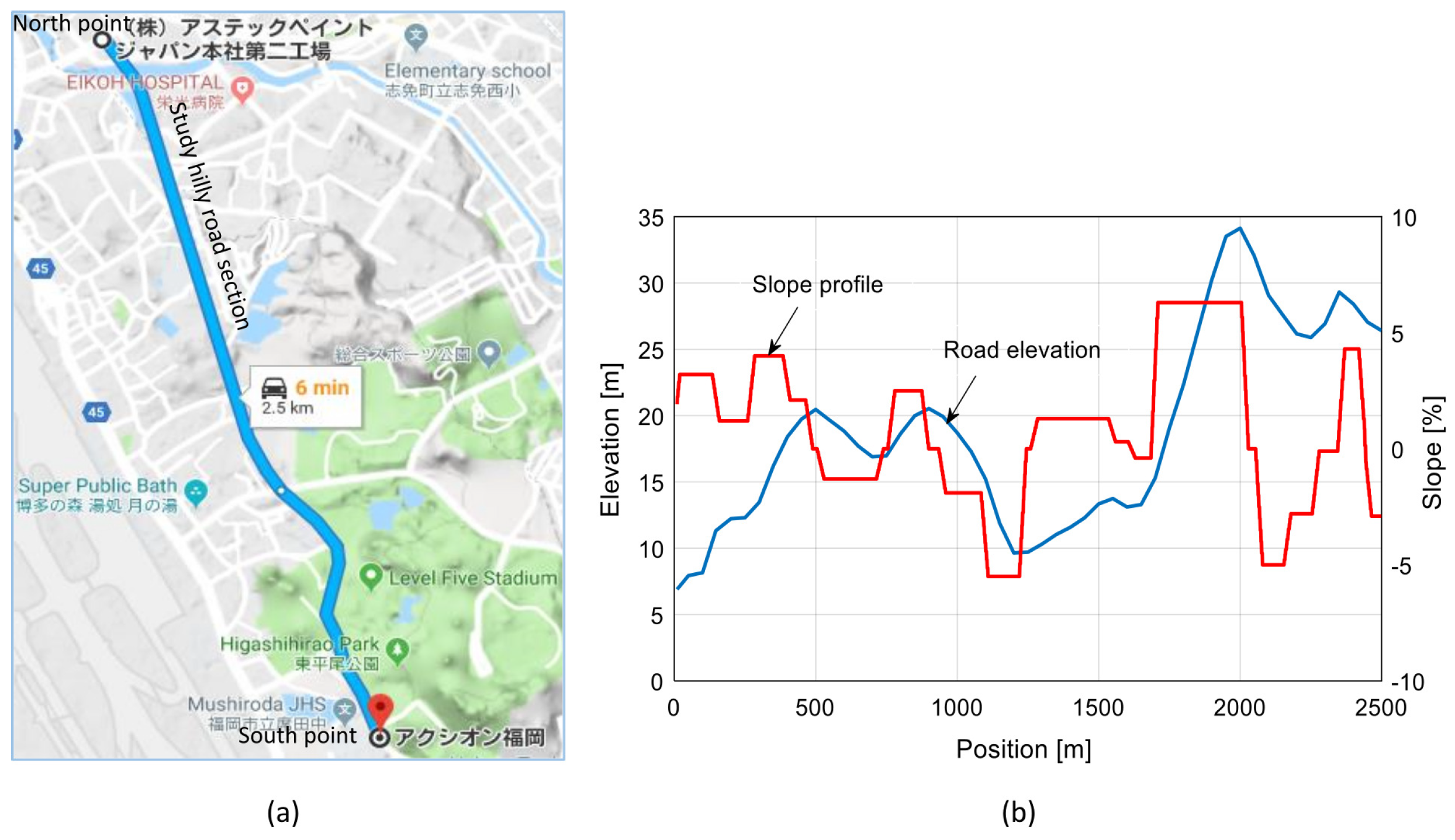
3.1. Simulation Settings
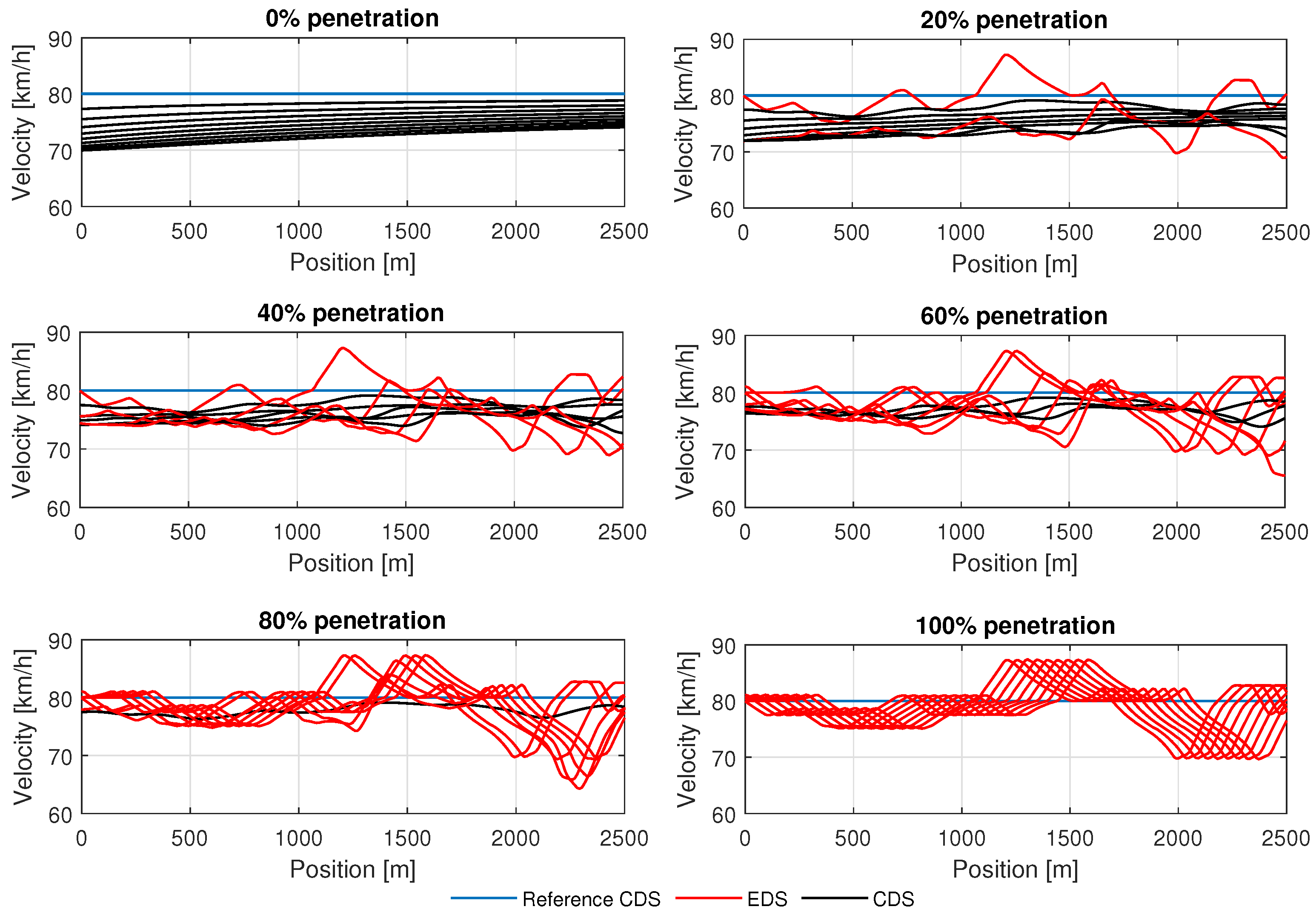
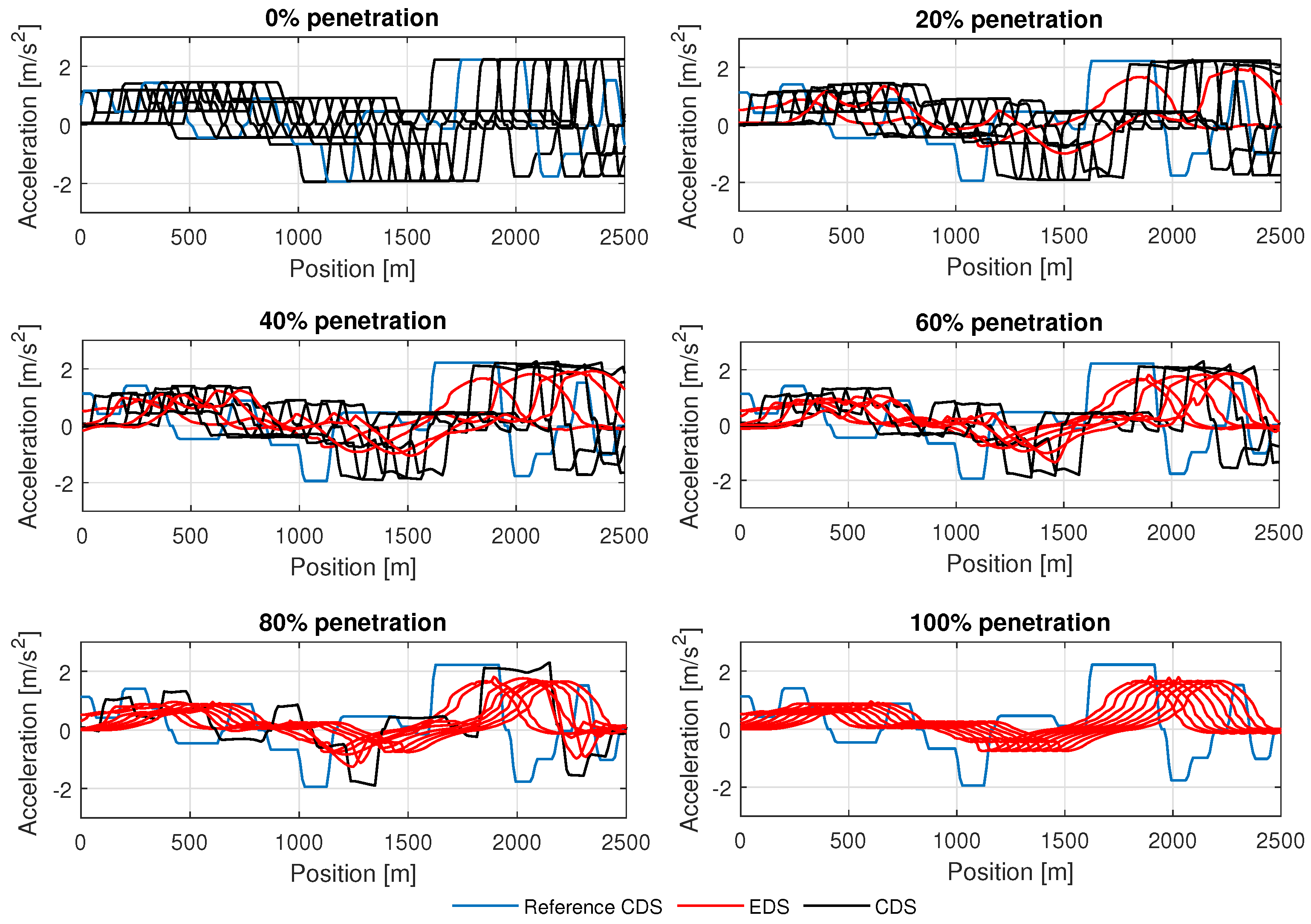
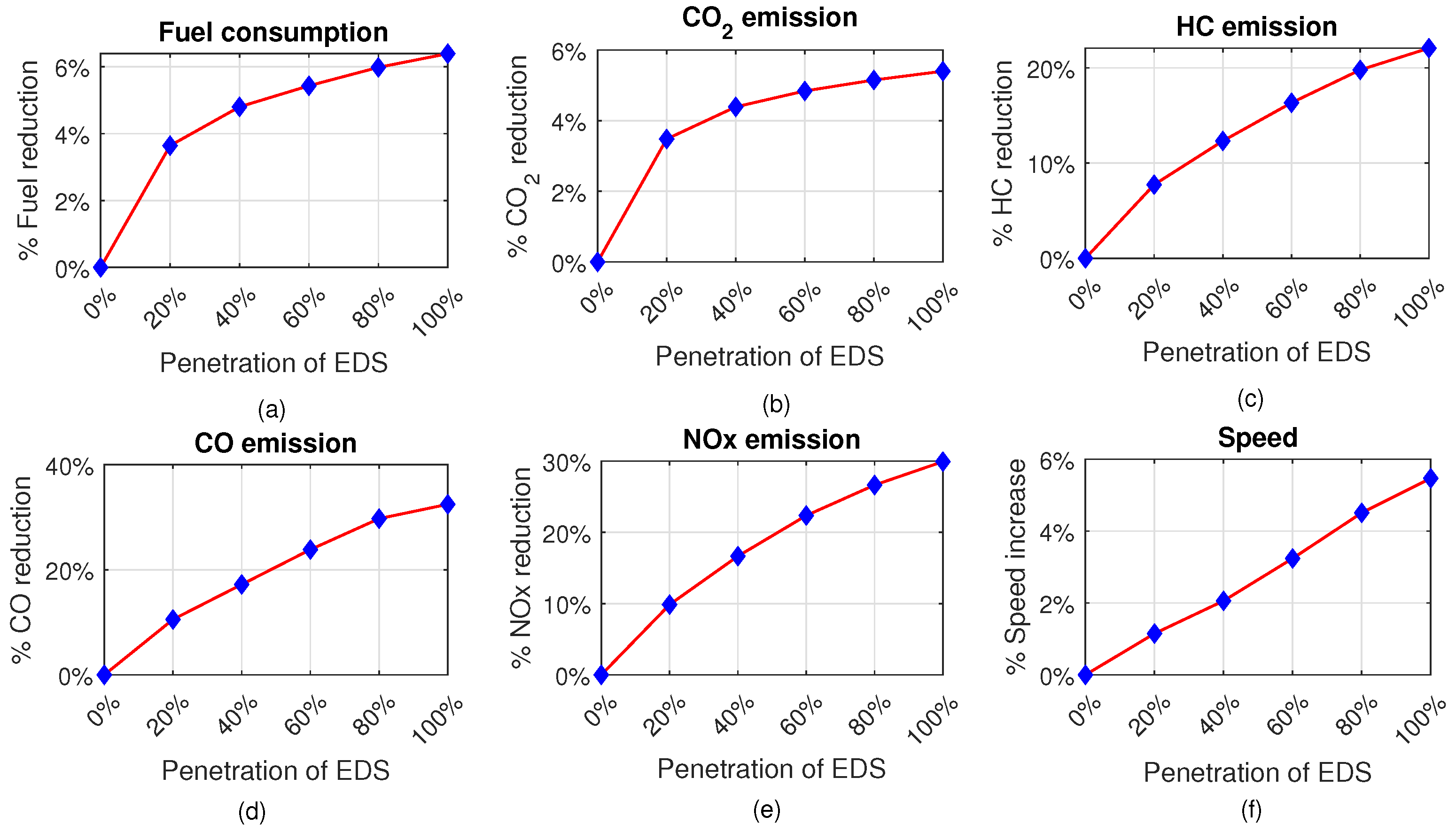
3.2. Validation and Impact Assessment
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- EPA. Inventory of U.S. Greenhouse Gas Emissions and Sinks: 1990–2021. 430-R-23-002 Report. U.S. Environmental Protection Agency. 2023. Available online: https://www.epa.gov/ghgemissions/inventory-us-greenhouse-gas-emissions-and-sinks-1990-2021 (accessed on 1 December 2023).
- Zhang, K.; Frey, H.C. Road grade estimation for on-road vehicle emissions modeling using light detection and ranging data. J. Air Waste Manag. Assoc. 2006, 56, 777–788. [Google Scholar] [CrossRef]
- EU Commission. A European Strategy for Low-Emission Mobility. SWD 244 Report. 2016. Available online: https://ec.europa.eu/commission/presscorner/detail/es/MEMO_16_2497 (accessed on 1 December 2023).
- Mendez, S.; Thirouard, B. Using multiple injection strategies in diesel combustion: Potential to improve emissions, noise and fuel economy trade-off in low CR engines. SAE Int. J. Fuels Lubr. 2009, 1, 662–674. [Google Scholar] [CrossRef]
- Zhang, W.; Lu, J.; Xu, P.; Zhang, Y. Moving towards sustainability: Road grades and on-road emissions of heavy-duty vehicles—A case study. Sustainability 2015, 7, 12644–12671. [Google Scholar] [CrossRef]
- Carrese, S.; Gemma, A.; La Spada, S. Impacts of driving behaviors, slope and vehicle load factor on bus fuel consumption and emissions: A real case study in the city of Rome. Procedia Soc. Behav. Sci. 2013, 87, 211–221. [Google Scholar] [CrossRef]
- Frey, H.C.; Zhang, K.; Rouphail, N.M. Fuel use and emissions comparisons for alternative routes, time of day, road grade, and vehicles based on in-use measurements. Environ. Sci. Technol. 2008, 42, 2483–2489. [Google Scholar] [CrossRef]
- Meseguer, J.E.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Assessing the impact of driving behavior on instantaneous fuel consumption. In Proceedings of the 12th Annual IEEE Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2015; pp. 443–448. [Google Scholar]
- Bakibillah, A.S.M.; Kamal, M.A.S.; Tan, C.P.; Hayakawa, T.; Imura, J. Event-driven stochastic eco-driving strategy at signalized intersections from self-driving data. IEEE Trans. Veh. Technol. 2019, 68, 8557–8569. [Google Scholar] [CrossRef]
- Sun, C.; Guanetti, J.; Borrelli, F.; Moura, S.J. Optimal eco-driving control of connected and autonomous vehicles through signalized intersections. IEEE Internet Things J. 2020, 7, 3759–3773. [Google Scholar] [CrossRef]
- Gao, J.; Chen, H.; Li, Y.; Chen, J.; Zhang, Y.; Dave, K.; Huang, Y. Fuel consumption and exhaust emissions of diesel vehicles in worldwide harmonized light vehicles test cycles and their sensitivities to eco-driving factors. Energy Convers. Manag. 2019, 196, 605–613. [Google Scholar] [CrossRef]
- Bakibillah, A.S.M.; Kamal, M.A.S.; Tan, C.P.; Hayakawa, T.; Imura, J. Optimal eco-driving scheme for reducing energy consumption and carbon emissions on curved roads. Heliyon 2014, 10, e23586. [Google Scholar] [CrossRef]
- Schwarzkopf, A.; Leipnik, R. Control of highway vehicles for minimum fuel consumption over varying terrain. Transp. Res. 1977, 11, 279–286. [Google Scholar] [CrossRef]
- Chang, D.J.; Morlok, E.K. Vehicle speed profiles to minimize work and fuel consumption. J. Transp. Eng. 2005, 131, 173–182. [Google Scholar] [CrossRef]
- Saerens, B.; Van den Bulck, E. Calculation of the minimum-fuel driving control based on Pontryagin’s maximum principle. Transp. Res. Part D Transp. Environ. 2013, 24, 89–97. [Google Scholar] [CrossRef]
- Hellström, E.; Ivarsson, M.; Åslund, J.; Nielsen, L. Look-ahead control for heavy trucks to minimize trip time and fuel consumption. Control. Eng. Pract. 2009, 17, 245–254. [Google Scholar] [CrossRef]
- Luu, H.T.; Nouvelière, L.; Mammar, S. Dynamic programming for fuel consumption optimization on light vehicle. IFAC Proc. Vol. 2010, 43, 372–377. [Google Scholar] [CrossRef]
- Han, J.; Kum, D.; Park, Y. Impact of hilly road information on fuel economy of FCHEV based on parameterization of hilly roads. Int. J. Automot. Technol. 2014, 15, 283–290. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Mukai, M.; Murata, J.; Kawabe, T. Ecological vehicle control on roads with up-down slopes. IEEE Trans. Intell. Transp. Syst. 2011, 12, 783–794. [Google Scholar] [CrossRef]
- Yu, K.; Yang, J.; Yamaguchi, D. Model predictive control for hybrid vehicle ecological driving using traffic signal and road slope information. Control. Theory Technol. 2015, 13, 17–28. [Google Scholar] [CrossRef]
- Bakibillah, A.S.M.; Kamal, M.A.S.; Tan, C.P.; Hayakawa, T.; Imura, J. Eco-driving on hilly roads using model predictive control. In Proceedings of the Joint 7th IEEE International Conference on Informatics, Electronics & Vision (ICIEV) and 2nd IEEE International Conference on Imaging, Vision & Pattern Recognition (icIVPR) 2018, Kitakyushu, Japan, 25–29 June 2018; pp. 476–480. [Google Scholar]
- Bakibillah, A.S.M.; Kamal, M.A.S.; Tan, C.P.; Hayakawa, T.; Imura, J. Fuzzy-tuned model predictive control for dynamic eco-driving on hilly roads. Appl. Soft Comput. 2021, 99, 106875. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Helbing, D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity. Philos. Trans. R. Soc. A Math. Phys. Eng. 2010, 368, 4585–4605. [Google Scholar] [CrossRef]
- Iancu, I. A Mamdani type fuzzy logic controller. Fuzzy Log. Control. Concepts Theor. Appl. 2012, 15, 325–350. [Google Scholar]
- Ahn, K.; Rakha, H.; Trani, A.; Van Aerde, M. Estimating vehicle fuel consumption and emissions based on instantaneous speed and acceleration levels. J. Transp. Eng. 2002, 128, 182–190. [Google Scholar] [CrossRef]
- Rakha, H.; Ahn, K.; Trani, A. Development of VT-Micro model for estimating hot stabilized light duty vehicle and truck emissions. Transp. Res. Part D Transp. Environ. 2004, 9, 49–74. [Google Scholar] [CrossRef]
- Yao, Z.; Wang, Y.; Liu, B.; Zhao, B.; Jiang, Y. Fuel consumption and transportation emissions evaluation of mixed traffic flow with connected automated vehicles and human-driven vehicles on expressway. Energy 2021, 230, 120766. [Google Scholar] [CrossRef]
- Berzi, L.; Delichristov, D.; Favilli, T.; Pierini, M.; Ponchant, M.; Qehajaj, A.; Pugi, L. Smart energy management of auxiliary load for electric vehicles. In Proceedings of the IEEE International Conference on Environment and Electrical Engineering and IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–6. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Penetration Rates of EDS | ||||||
|---|---|---|---|---|---|---|
| 0% | 20% | 40% | 60% | 80% | 100% | |
| North to South: | ||||||
| Fuel consumption [mL] | 3142.95 | 3028.49 | 2991.80 | 2972.20 | 2954.94 | 2942.12 |
| CO2 emission [g] | 7209.34 | 6958.31 | 6892.16 | 6860.33 | 6838.14 | 6820.56 |
| HC emission [g] | 3.49 | 3.22 | 3.08 | 2.92 | 2.80 | 2.72 |
| CO emission [g] | 79.85 | 71.42 | 66.10 | 60.80 | 56.10 | 53.92 |
| NOx emission [g] | 9.12 | 8.22 | 7.60 | 7.08 | 6.69 | 6.39 |
| Speed [km/h] | 75.45 | 76.32 | 76.97 | 77.90 | 78.86 | 79.58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bakibillah, A.S.M.; Kamal, M.A.S.; Imura, J.-i.; Mukai, M.; Yamada, K. Eco-Driving on Hilly Roads in a Mixed Traffic Environment: A Model Predictive Control Approach. Actuators 2024, 13, 144. https://doi.org/10.3390/act13040144
Bakibillah ASM, Kamal MAS, Imura J-i, Mukai M, Yamada K. Eco-Driving on Hilly Roads in a Mixed Traffic Environment: A Model Predictive Control Approach. Actuators. 2024; 13(4):144. https://doi.org/10.3390/act13040144
Chicago/Turabian StyleBakibillah, A. S. M., Md Abdus Samad Kamal, Jun-ichi Imura, Masakazu Mukai, and Kou Yamada. 2024. "Eco-Driving on Hilly Roads in a Mixed Traffic Environment: A Model Predictive Control Approach" Actuators 13, no. 4: 144. https://doi.org/10.3390/act13040144
APA StyleBakibillah, A. S. M., Kamal, M. A. S., Imura, J.-i., Mukai, M., & Yamada, K. (2024). Eco-Driving on Hilly Roads in a Mixed Traffic Environment: A Model Predictive Control Approach. Actuators, 13(4), 144. https://doi.org/10.3390/act13040144