
A Novel Thermal Deformation Self-Stabilization Flexible Connection Mechanism



Abstract
:1. Introduction
2. Flexible Connection Mechanism
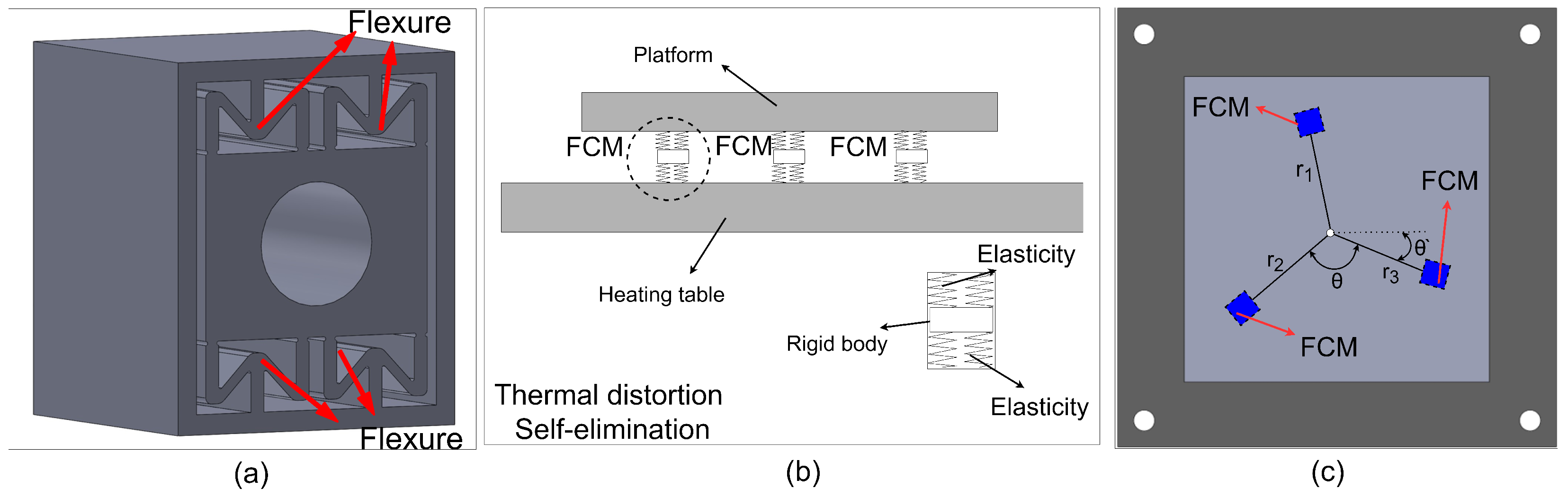
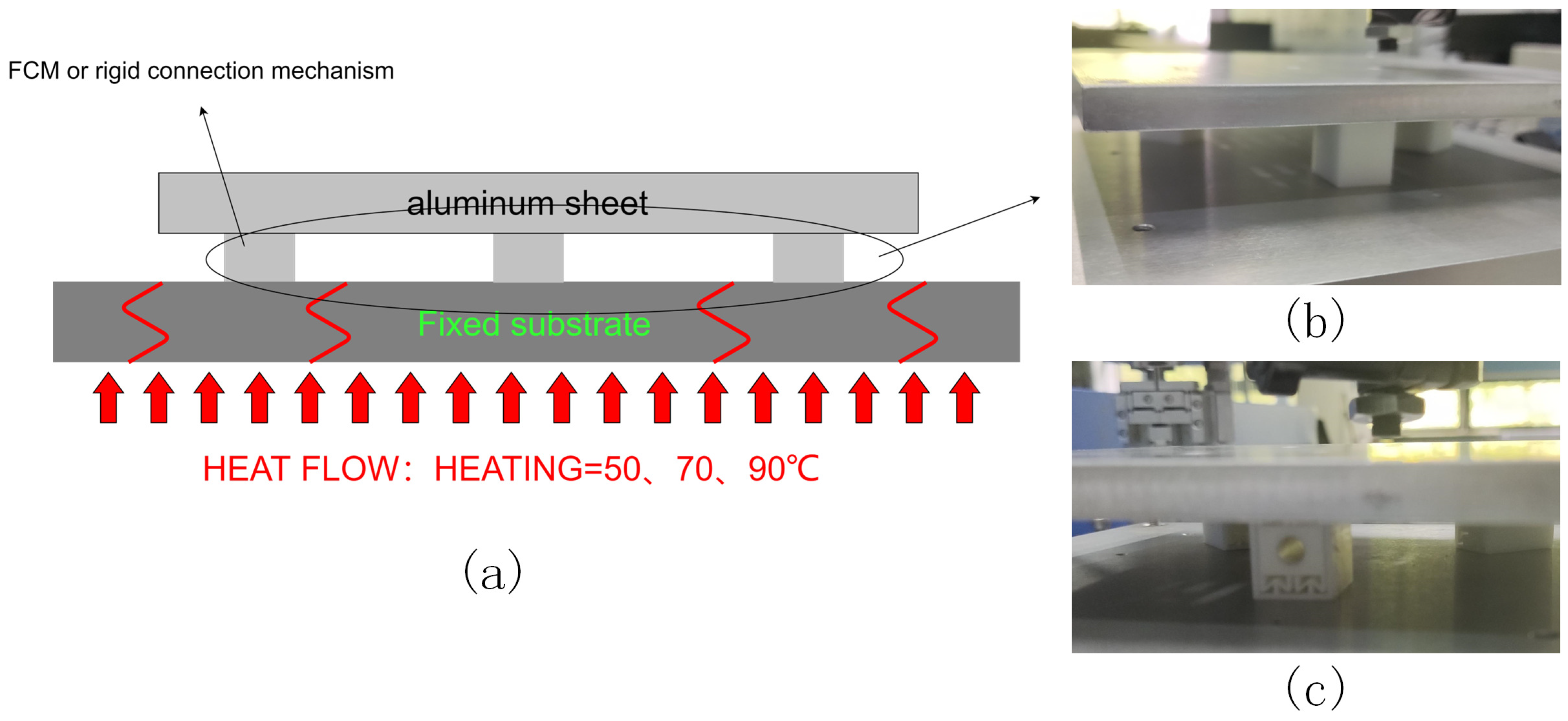
2.1. Thermal Distortion Self-Elimination Principle
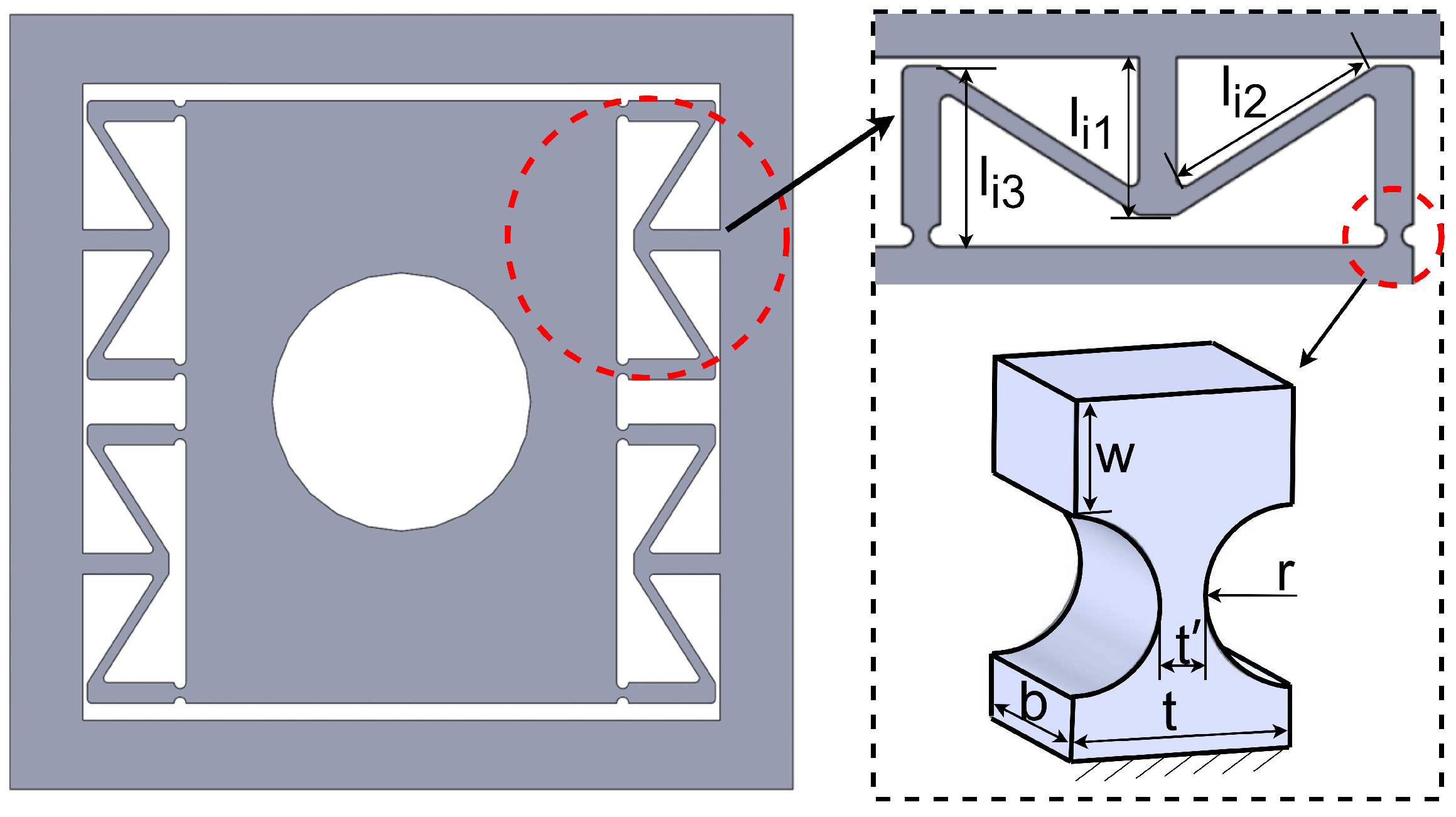
2.2. Design of FCM
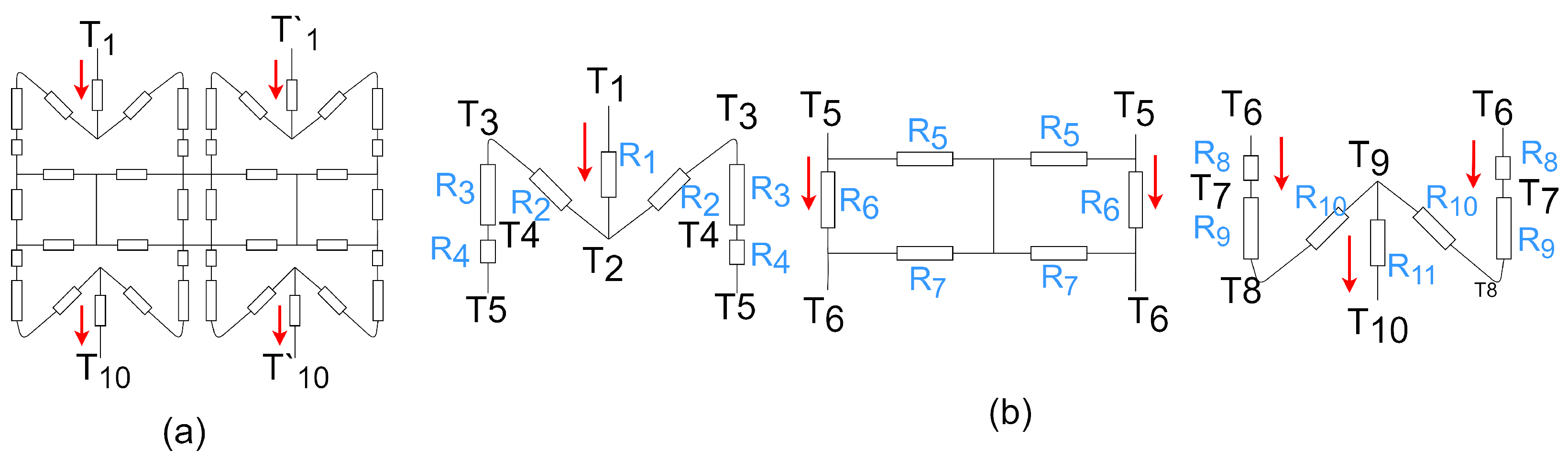
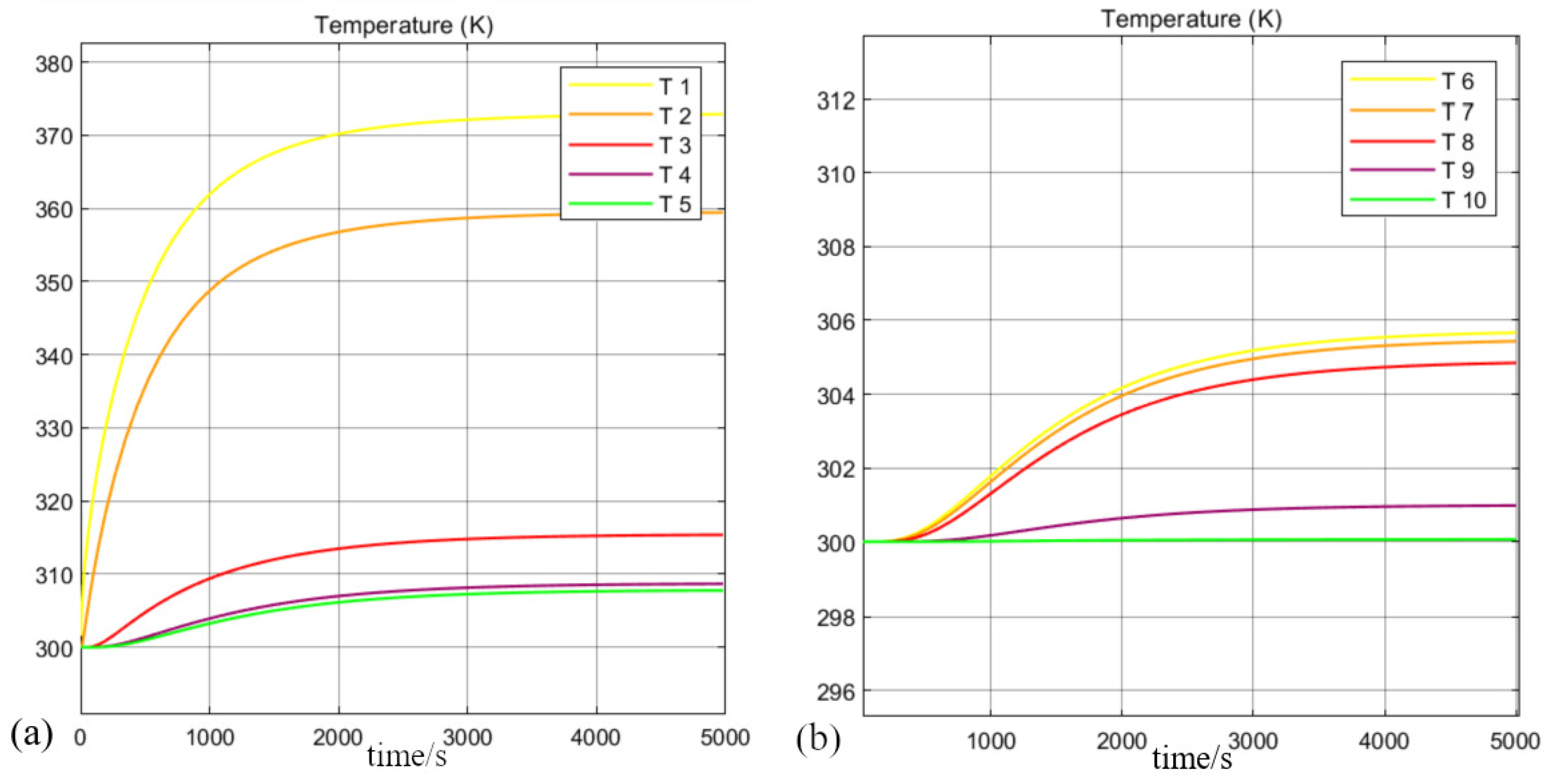
3. Heat Transfer Model of FCM
4. FCM Mechanism Optimization and FEA
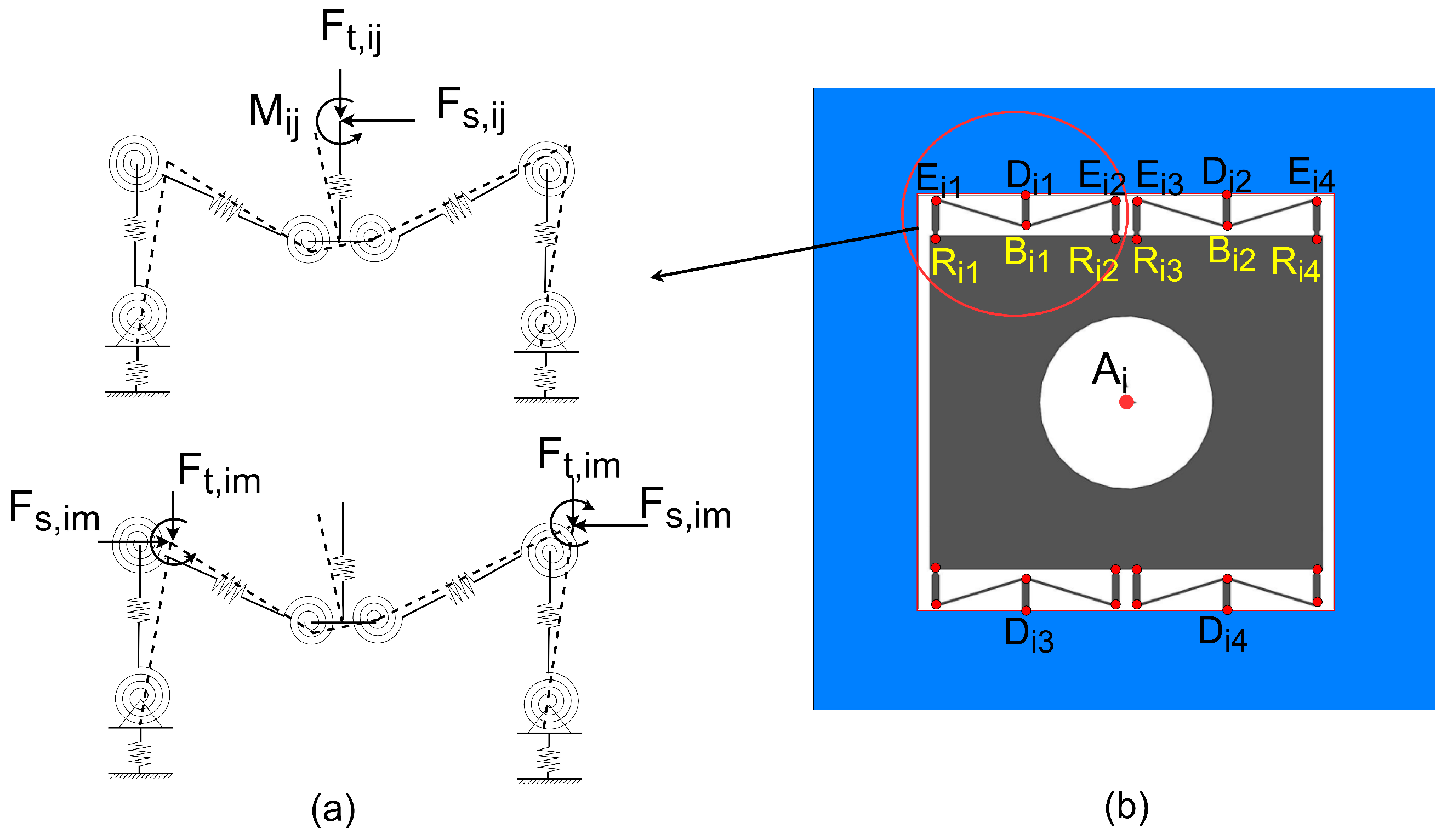
4.1. Modeling of FCM with Thermal Distortion Self-Elimination
4.2. Parameters Optimization
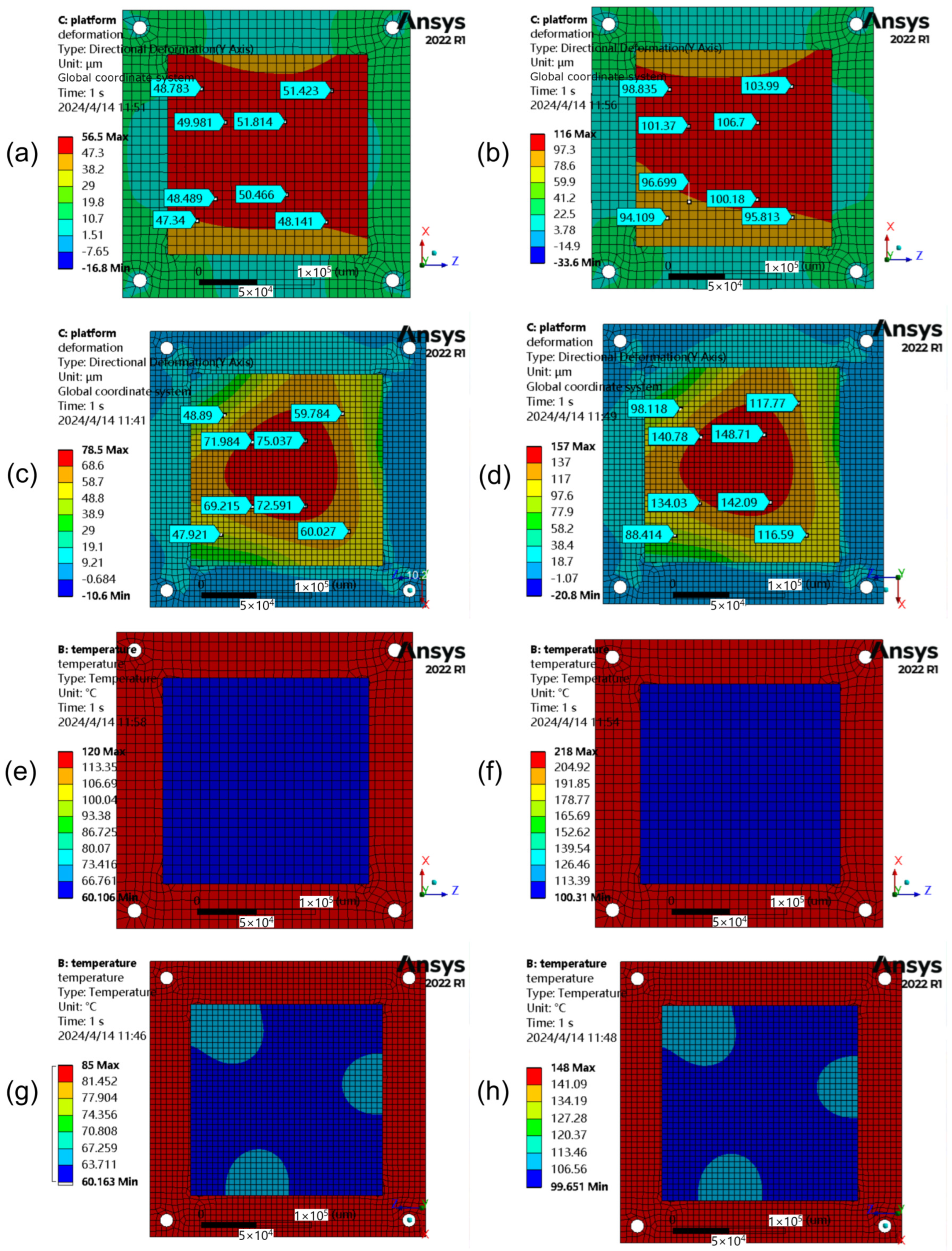
4.3. Simulation Analysis of FCM Thermal Distortion Self-Elimination Performance
5. Experiments and Discussion
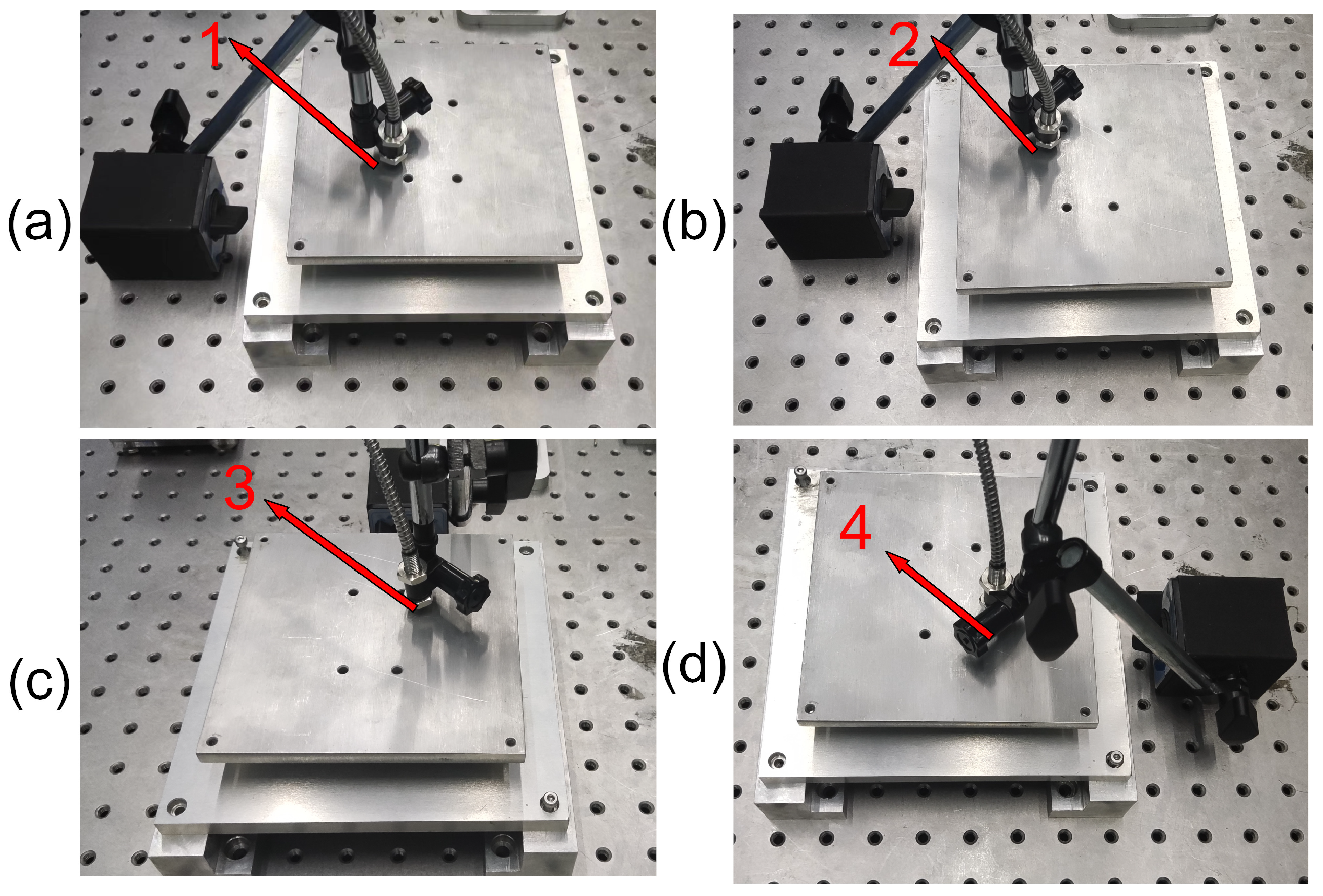
5.1. Experimental Setup
5.2. Experimental Instruments
5.3. Experimental Procedure
5.4. Experimental Data Processing and Result Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liang, Q.; Sun, Y.; Wang, L.; Liu, M. A Novel Inertial-Aided Visible Light Positioning System Using Modulated LEDs and Unmodulated Lights as Landmarks. IEEE Trans. Autom. Sci. Eng. 2022, 19, 3049–3067. [Google Scholar] [CrossRef]
- Murthy, L.; Mukhopadhyay, A.; Yellheti, V.; Arjun, S.; Biswas, P. Evaluating Accuracy of Eye Gaze Controlled Interface in Military Aviation Environment. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020. [Google Scholar]
- Wei, Z.; Li, M.; Liu, Z.; Wang, Z.; Zhang, C.; Chen, C.J.; Wu, M.C.; Yang, Y.; Yu, C.; Fu, H. Parallel Mini/Micro-LEDs Transmitter: Size-Dependent Effect and Gbps Multi-User Visible Light Communication. J. Light. Technol. 2022, 40, 2329–2340. [Google Scholar] [CrossRef]
- Alimova, D.; Efimov, I.; Kharkin, D. Methods of Reducing the Intensity of Specular Reflections of LCD Modules for Aviation Applications. In Proceedings of the 2020 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), Russky, Island, 6–7 October 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Wu, Y.; Ma, J.; Su, P.; Zhang, L.; Xia, B. Full-Color Realization of Micro-LED Displays. Nanomaterials 2020, 10, 2482. [Google Scholar] [CrossRef]
- Zhou, X.; Tian, P.; Sher, C.W.; Wu, J.; Liu, H.; Liu, R.; Kuo, H.C. Growth, transfer printing and colour conversion techniques towards full-colour micro-LED display. Prog. Quantum Electron. 2020, 71, 100263. [Google Scholar] [CrossRef]
- Koden, M. OLED Displays and Lighting; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Askari, M.B. OLED Display Technology. Am. J. Opt. Photonics 2014, 2, 32–36. [Google Scholar] [CrossRef]
- Tsukamoto, Y.; Umeda, T.; Mizusaki, M.; Shibasaki, M.; Uetake, N.; Kawato, S.; Shimada, S. Mass Production Technology of Flexible AMOLED Displays and Improvement of the OLED Device Characteristics. In Proceedings of the 2019 26th International Workshop on Active-Matrix Flatpanel Displays and Devices (AM-FPD), Kyoto, Japan, 2–5 July 2019; Volume 26, pp. 1–2. [Google Scholar] [CrossRef]
- Chen, Z.; Yan, S.; Danesh, C. Topical Review MicroLED technologies and applications: Characteristics, fabrication, progress, and challenges. J. Phys. D Appl. Phys. 2021, 54, 123001. [Google Scholar] [CrossRef]
- Bai, J.; Niu, P.; Cao, S. Highly precise measurement of depth for μLED based on single camera. Measurement 2022, 89, 110439. [Google Scholar] [CrossRef]
- Huang, Y.; Tan, G.; Gou, F.; Li, M.C.; Lee, S.L.; Wu, S.T. Prospects and challenges of mini-LED and micro-LED displays. J. Soc. Inf. Disp. 2019, 27, 387–401. [Google Scholar] [CrossRef]
- Li, J.; Tang, H.; Zhu, Z.; He, S.; Gao, J.; He, Y.; Chen, X. Hybrid Position/Force Fully Closed-Loop Control of a Flip-Chip Soft-Landing Bonding System. IEEE Trans. Ind. Electron. 2022, 69, 9235–9245. [Google Scholar] [CrossRef]
- Li, P.; Tao, J.; Zhao, Y.; Sun, Y.; Fan, K.; Zhu, L.; Sun, W.; Lv, J.; Qin, Y.; Wang, Q.; et al. Flexible Quantum-Dot Color-Conversion Layer Based on Microfluidics for Full-Color Micro-LEDs. Micromachines 2022, 13, 448. [Google Scholar] [CrossRef]
- Niu, P.; Sun, H.; Zhaofeng, L.; Qiang, L.; Shinan, C.; Haitao, T. Design And Force Analysis of The Chip Transfer Platform for Mass Transfer. In Proceedings of the 2021 18th China International Forum on Solid State Lighting & 2021 7th International Forum on Wide Bandgap Semiconductors (SSLChina: IFWS), Shenzhen, China, 6–8 December 2021; pp. 143–145. [Google Scholar] [CrossRef]
- Pan, Z.J.; Chen, Z.Z.; Jiao, F.; Zhan, J.L.; Chen, Y.Y.; Chen, Y.F.; Nie, J.X.; Zhao, T.Y.; Deng, C.H.; Kang, X.N.; et al. A review of key technologies for epitaxy and chip process of micro light-emitting diodes in display application. Acta Phys. Sin. 2020, 69, 198501. [Google Scholar] [CrossRef]
- Tsai, M.Y.; Wang, Y.W. A Theoretical Solution for Thermal Warpage of Flip-Chip Packages. IEEE Trans. Compon. Packag. Manuf. Technol. 2020, 10, 72–78. [Google Scholar] [CrossRef]
- Tang, X.; Guo, C.; Wang, K.; Song, D.; Zhang, J.; Qi, W. New Fourier Expansion for Thermal Buckling Analysis of Rectangular Thin Plates with Various Edge Restraints. Arch. Appl. Mech. 2023, 93, 3411–3426. [Google Scholar] [CrossRef]
- Lee, H.J.; Ahn, D. Development of Air Bearing Stage Using Flexure for Yaw Motion Compensation. Actuators 2022, 11, 100. [Google Scholar] [CrossRef]
- Jia, Y.; Tang, H.; Xu, S.; Xu, Y.; Chen, X.; Tian, Y. A Novel Decoupled Flexure Nanopositioner with Thermal Distortion Self-Elimination Function. IEEE/ASME Trans. Mechatron. 2022, 27, 2953–2962. [Google Scholar] [CrossRef]
- Chun, H.; Kim, G.H.; Villarraga-Gómez, H.; Kim, H.Y.; Elwany, A.; Lee, C. Characterization of Thermally Stable Compliant Structures with Internal Fluidic Channels. Precis. Eng. 2020, 66, 201–208. [Google Scholar] [CrossRef]
- Wang, H.; Yu, H.; Wang, X.; Zhou, H.; Lei, H.; Chen, M.; Guo, X. Load-Bearing Sandwiched Metastructure with Zero Thermal-Induced Warping and High Resonant Frequency: Mechanical Designs, Theoretical Predictions, and Experimental Demonstrations. Mech. Mater. 2023, 177, 104531. [Google Scholar] [CrossRef]
- Liu, F.; Li, W.; Zhao, W.; Wang, X.; Wang, X. Fast Optimization Design of the Flexure for a Space Mirror Based on Mesh Deformation. Photonics 2021, 8, 567. [Google Scholar] [CrossRef]
- Guo, L.; Jiang, H.; Lu, Q.; Huang, J.; Zheng, Y.; Zhang, Y.; Zhuang, Y.; Huang, L. Hybrid ball-hinged secondary mirror assembly for high-precision surface shape maintenance. Opt. Express 2023, 31, 22603–22621. [Google Scholar] [CrossRef]
- Huo, T.; Yu, J.; Zhao, H. Design of a Kinematic Flexure Mount for Precision Instruments Based on Stiffness Characteristics of Flexural Pivot. Mech. Mach. Theory 2020, 150, 103868. [Google Scholar] [CrossRef]
- Wen, S.; Xu, Q. Design of a Novel Piezoelectric Energy Harvester Based on Integrated Multistage Force Amplification Frame. IEEE/ASME Trans. Mechatron. 2019, 24, 1228–1237. [Google Scholar] [CrossRef]
- Zhou, Y.; Bai, Z. Research on Thermal Coupling Modeling for Multi-chip Paralleled IGBT Modules Based on Thermal Resistance Network. In Proceedings of the 2023 IEEE 6th International Conference on Information Systems and Computer Aided Education (ICISCAE), Dalian, China, 23–25 September 2023; pp. 407–410. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimized Parameters | Ranges of Values | Optimal Solution Selection |
|---|---|---|
| [0°, 20°] | 10° | |
| [50 mm, 70 mm] | 64 mm | |
| [50 mm, 70 mm] | 64 mm | |
| [50 mm, 70 mm] | 64 mm | |
| m | [4 mm, 8 mm] | 6.4 mm |
| [2 mm, 5 mm] | 3 mm | |
| [2 mm, 5 mm] | 2.8 mm | |
| [2 mm, 5 mm] | 2.8 mm | |
| w | [2 mm, 5 mm] | 2.8 mm |
| t | [0.4 mm, 0.8 mm] | 0.7 mm |
| [0.3 mm, 0.6 mm] | 0.5 mm |
| Laboratory Instruments | Eddy Current Sensors | Handheld Thermal Imaging Camera | Heating Platform |
|---|---|---|---|
| Instrument model | ML33 | HIKMICRO H10 | CH9702 |
| Mechanical Deformation | Inspection Point 1 | Inspection Point 2 | Inspection Point 3 | Inspection Point 4 |
|---|---|---|---|---|
| 50 °C With FCM | 0.044 | 0.042 | 0.048 | 0.04 |
| 50 °C Without FCM | 0.091 | 0.101 | 0.098 | 0.09 |
| 70 °C With FCM | 0.112 | 0.122 | 0.106 | 0.123 |
| 70 °C Without FCM | 0.191 | 0.173 | 0.188 | 0.180 |
| 90 °C With FCM | 0.198 | 0.218 | 0.187 | 0.209 |
| 90 °C Without FCM | 0.286 | 0.304 | 0.302 | 0.299 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, F.; Lin, Z.; Tang, H. A Novel Thermal Deformation Self-Stabilization Flexible Connection Mechanism. Actuators 2024, 13, 146. https://doi.org/10.3390/act13040146
Feng F, Lin Z, Tang H. A Novel Thermal Deformation Self-Stabilization Flexible Connection Mechanism. Actuators. 2024; 13(4):146. https://doi.org/10.3390/act13040146
Chicago/Turabian StyleFeng, Fahui, Zhihang Lin, and Hui Tang. 2024. "A Novel Thermal Deformation Self-Stabilization Flexible Connection Mechanism" Actuators 13, no. 4: 146. https://doi.org/10.3390/act13040146
APA StyleFeng, F., Lin, Z., & Tang, H. (2024). A Novel Thermal Deformation Self-Stabilization Flexible Connection Mechanism. Actuators, 13(4), 146. https://doi.org/10.3390/act13040146