
Development of Static Test Equipment and a System for Lever-Loaded Air Springs

Abstract
:1. Introduction
2. Design Requirements for Test Equipment
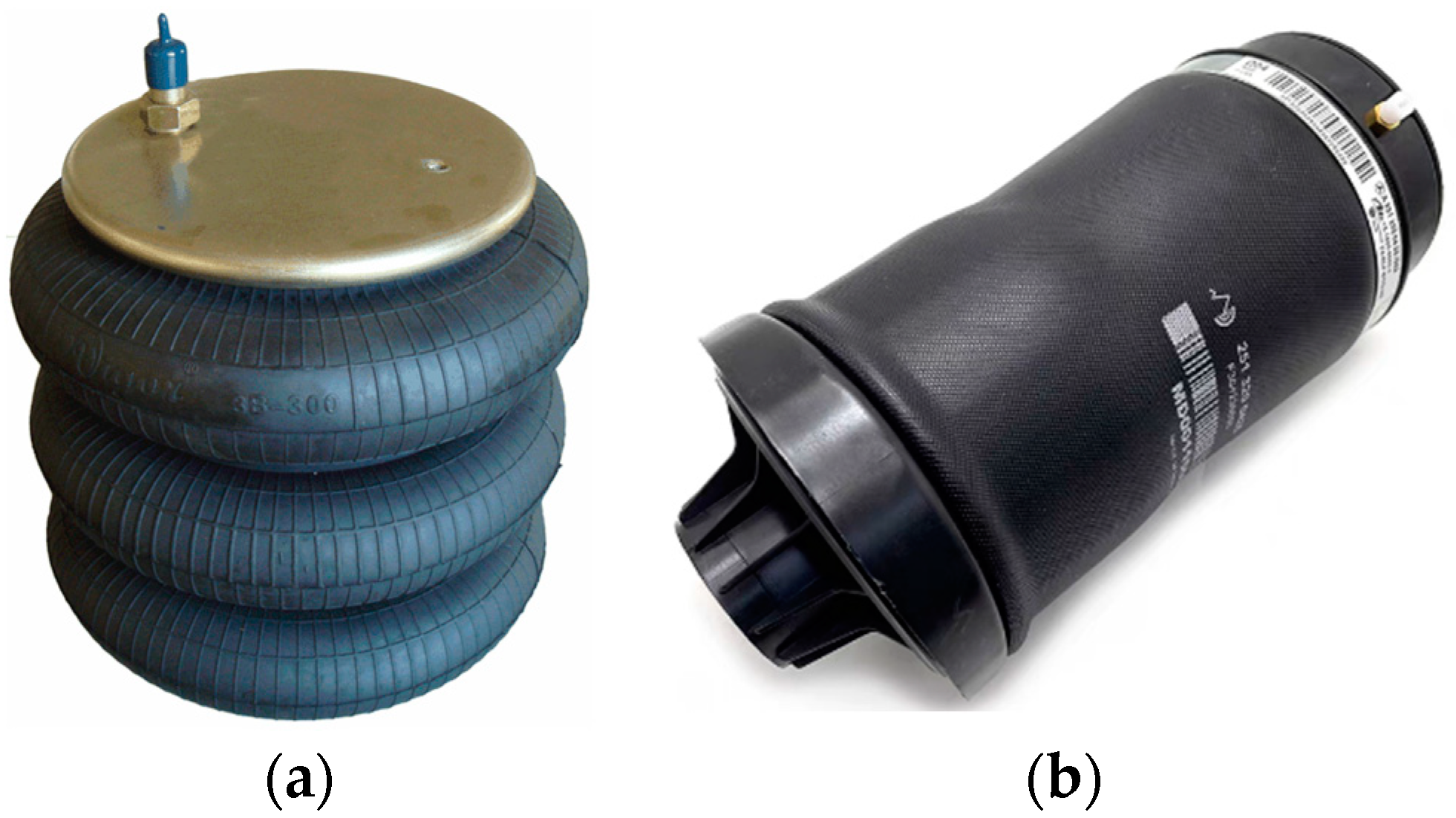
2.1. Test Subjects
2.2. Design Plan
3. Mechanical System Design
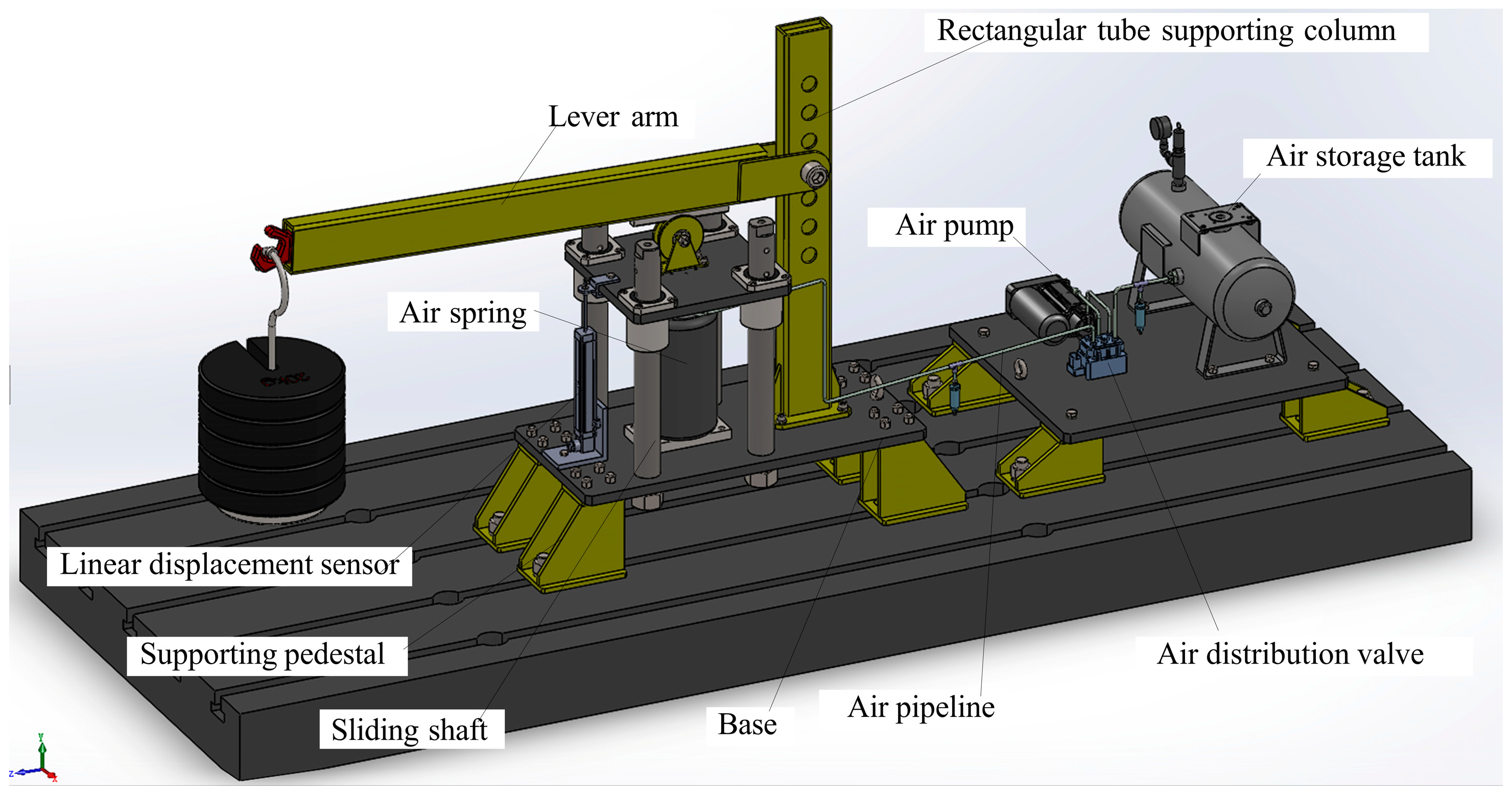
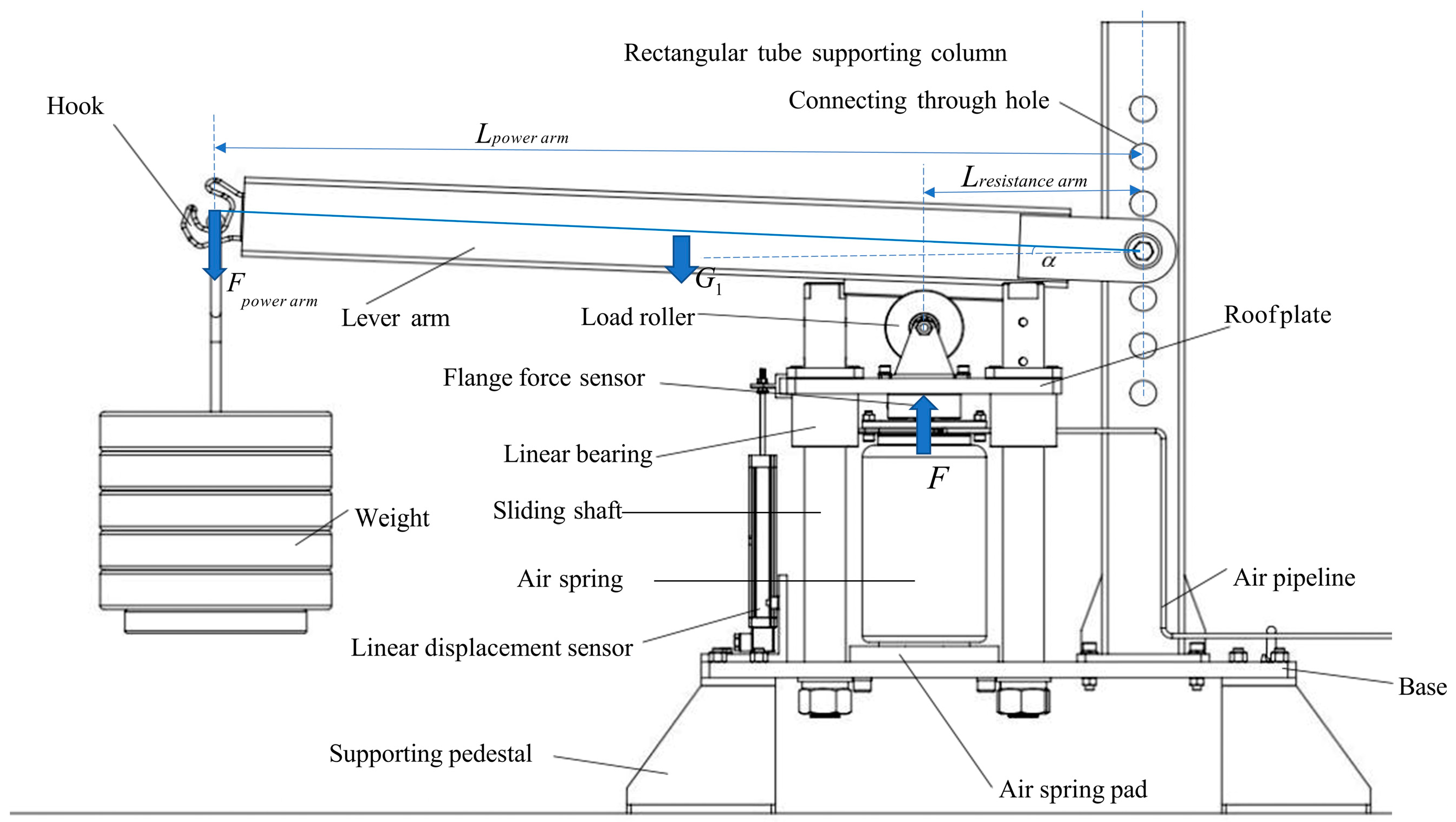
3.1. Leveraged Load Loading System
3.2. Air Spring Charging and Discharging System
4. Measurement and Control System Design
4.1. Measurement and Control Section
4.2. Host Computer Software Design
4.2.1. Parameter Settings
4.2.2. Data Storage
4.2.3. Historical Data Extraction
5. Experiment Verification
5.1. Upper Computer Software Testing
- (1)
- Test the control instruction parsing of the host computer and the sending and receiving functions of CAN messages;
- (2)
- Test the accuracy of the pressure value output of the sensor and whether the calibration coefficient is required;
- (3)
- Test whether the controller can perform the charging and discharging action of the air spring when the host computer performs the button operation;
- (4)
- Test the module functions of the host computer such as the waveform display, data storage and the historical data viewer.

5.2. Sensor Pressure Value Calibration
5.3. Building a Model of the Air Spring in AMESim
5.4. Charging and Discharging Test
- (1)
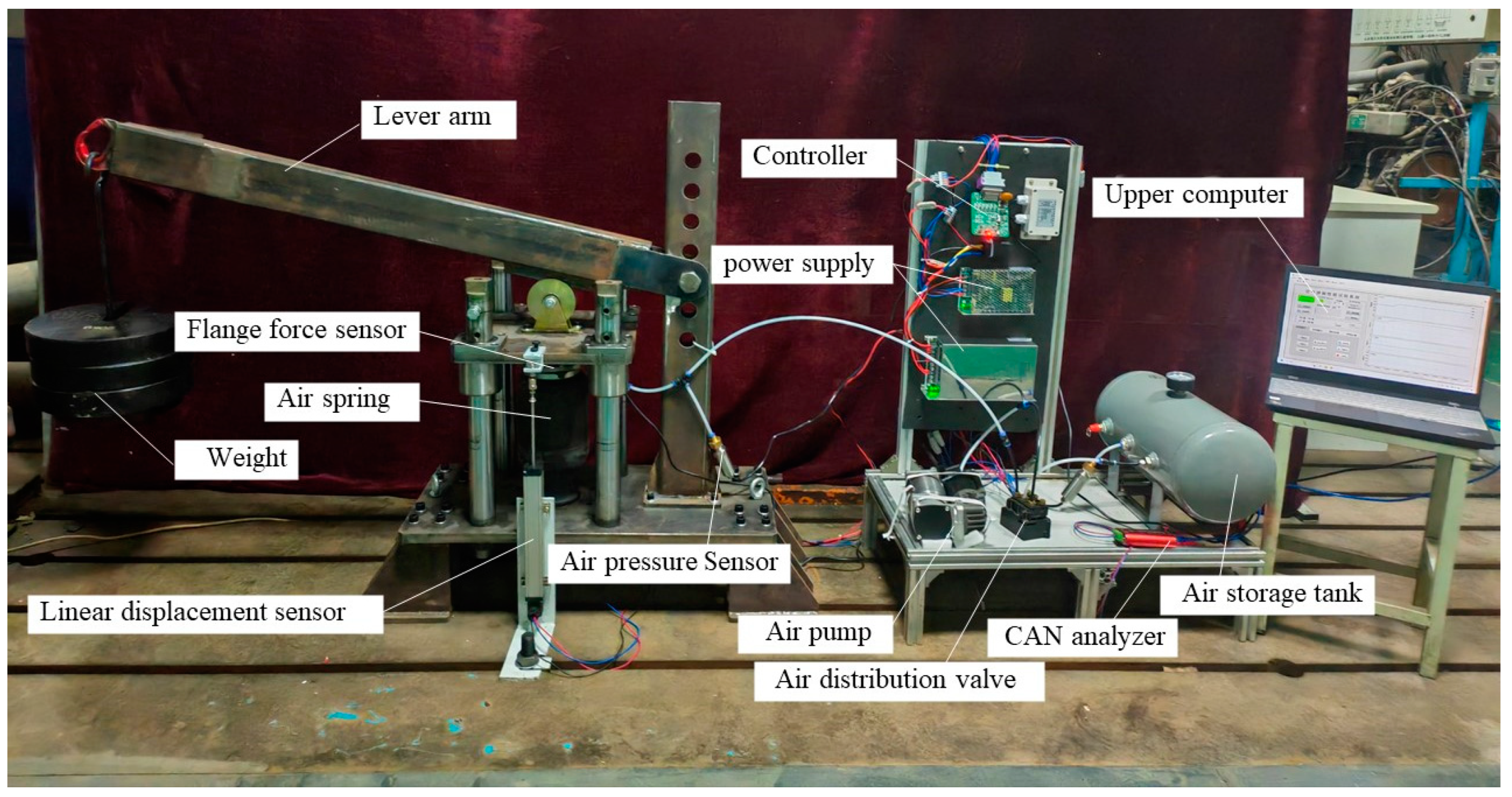
- Turn on the host computer, controller and power supply equipment to ensure that the test can be carried out normally.
- (2)
- Apply a 30 kg weight to the hook, inflate the air spring so that the lever arm is in a horizontal position and record the pressure value and load value in the air spring.
- (3)
- Use an air pump to slowly charge and discharge the air spring and save the data; the compression elongation stroke of the air spring is ±50 mm.
- (4)
- Add 20 kg and 40 kg weights, respectively, perform multiple charging and discharging tests and save data.
- (5)
- Filter the data and process them to obtain a smooth data curve.
- (6)
- Use AMESim software to carry out a simulation; the effective diameter of the simulation is set to 130 mm according to the measured air spring data. Considering that there is a certain error in the measurement process, rather than the actual working length, the length of the cylinder is set to 180 mm and the initial pressure is 1.65 bar, 2.4 bar and 3.2 bar.
6. Conclusions
- (1)
- In order to meet requirements of the project, the designed test equipment optimized the problem of load application at the upper end of the air spring with lever-type torque loading, avoided using an oil source and the installation of a large mass, reduced costs, improved the safety and provided a solution for the miniaturization and simplification of laboratory equipment.
- (2)
- Using the graphical programming advantages of LabVIEW, an air spring measurement and control system was designed; module functions, such as test data acceptance and processing, waveform display, saving, and report generation, were executed; and the air filling and deairing control of the air spring was achieved.
- (3)
- The test process was introduced and a simple air spring model was established in AMESim. The simulation data obtained were analyzed and compared with the actual test data, which proved that the test equipment could meet the technical requirements of the air spring characteristic test, providing a test basis for the performance analysis of air spring products and the subsequent development of air spring height control strategies.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Aboazoum, A. An overview of the most common vehicle suspension problems. Brill. Res. Artif. Intell. 2022, 2, 120–124. [Google Scholar] [CrossRef]
- Dandavate, K.D.; Kale, P.R. A Review on Controlling Methods for Active Suspension Systems. Int. J. Res. Appl. Sci. Eng. Technol. 2023, 11, 1675. [Google Scholar] [CrossRef]
- Abid, H.J.; Chen, J.; Nassar, A.A. Equivalent air spring suspension model for quarter-passive model of passenger vehicles. Int. Sch. Res. Not. 2015, 2015, 974020. [Google Scholar] [CrossRef] [PubMed]
- Chao, Y.; Shen, L.-M. Nonlinear stiffness characteristics and model of air spring for mattress based on finite element and numerical analysis. Adv. Theory Simul. 2022, 5, 2200393. [Google Scholar] [CrossRef]
- Shin, Y.-H.; Lee, J.-H. Estimation of the complex dynamic stiffness of inflated rubber diaphragms in pneumatic springs using finite element method. Sensors 2020, 20, 6728. [Google Scholar] [CrossRef] [PubMed]
- Ye, J.; Huang, H.; He, C.; Liu, G. Analysis of vertical stiffness of air spring based on finite element method. MATEC Web Conf. 2018, 153, 06006. [Google Scholar] [CrossRef]
- Moheyeldein, M.M.; Abd-El-Tawwab, A.M.; Abd El-gwwad, K.A.; Salem, M.M.M. An analytical study of the performance indices of air spring suspensions over the passive suspension. Beni-Suef Univ. J. Basic Appl. Sci. 2018, 7, 525–534. [Google Scholar] [CrossRef]
- Zhu, W.; Zhao, Z.; Zhou, X.; Cao, X.; Ye, M.; Cao, C.; Alam, M.M. Research on Damping Hole Optimization of Hydro-Pneumatic Suspension for Mining Trucks under Variable Load Conditions. Actuators 2024, 13, 163. [Google Scholar] [CrossRef]
- Xu, M.; Wan, Y.; Du, F.; He, L. Study on Characteristics of Hydro-Pneumatic Suspension in Passenger Cars. In Applied Mathematics, Modeling and Computer Simulation; IOS Press: Amsterdam, The Netherlands, 2022; pp. 1–7. [Google Scholar]
- Lee, S.J. Development and analysis of an air spring model. Int. J. Automot. Technol. 2010, 11, 471–479. [Google Scholar] [CrossRef]
- Goodarzi, A.; Lu, Y.; Khajepour, A. Vehicle Suspension System Technology and Design; Springer Nature: Berlin/Heidelberg, Germany, 2023. [Google Scholar]
- Pelz, P.F.; Buttenbender, J. The dynamic stiffness of an air-spring. In Proceedings of the ISMA2004 International Conference on Noise and Vibration Engineering, Leuven, Belgium, 20–22 September 2004. [Google Scholar]
- Gmiterko, A.; Miková, Ľ.; Prada, E. Analysis of air-spring for a link of hyper-redundant manipulator. Tech. Sci. Technol. 2018, 4, 66–77. [Google Scholar]
- Li, X.; He, Y.; Liu, W.; Wei, Y. Research on the vertical stiffness of a rolling lobe air spring. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 230, 1172–1183. [Google Scholar] [CrossRef]
- Huang, T.; Chen, G.; Zong, C.; Zhou, T. Research on Vehicle Height Adjustment Control of Electronically Controlled Air Suspension; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2015; ISSN 0148-7191. [Google Scholar]
- Hedrich, P.; Johe, M.; Pelz, P.F. Design and realization of an adjustable fluid powered piston for an active air spring. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016. [Google Scholar]
- Shan, H.Y. Vehicle height control of automotive air suspension system using fuzzy neural network approach. Appl. Mech. Mater. 2015, 727, 781–784. [Google Scholar] [CrossRef]
- Škamo, A.; Jokić, D. Advantages of early adoption of LabVIEW as industry-standard software in academia. In Proceedings of the 2023 12th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 6–10 June 2023; pp. 1–4. [Google Scholar]
- Liu, L.; Wang, M.; Hussain, S.; Altameem, T.; Liu, J.; Fouad, H.; Akhtar, M.S.; Qiao, G.; Liu, G. Design of a multi-channel gas sensor detection system based on STM32 microcontroller and LabVIEW. J. Nanoelectron. Optoelectron. 2023, 18, 17–24. [Google Scholar] [CrossRef]
- Kavga, A.; Thomopoulos, V.; Pischinas, E.; Tsipianitis, D.; Nikolakopoulos, P. Design and Simulation of a Greenhouse in a Computational Environment (ANSYS/FLUENT) and an Automatic Control System in a LABVIEW Environment. Simul. Model. Pract. Theory 2023, 129, 102837. [Google Scholar] [CrossRef]
- Sreenivasan, G.P.; Keppanan, M.M. Analytical approach for the design of convoluted air suspension and experimental validation. Acta Mech. Sin. 2019, 35, 1093–1103. [Google Scholar] [CrossRef]
- Tang, G.; Zhu, H.; Zhang, Y.; Sun, Y. Studies of Air Spring Mathematical Model and Its Performance in Cab Suspension System of Commercial Vehicle; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2015; ISSN 0148-7191. [Google Scholar]
- Jiang, X.; Xu, X.; Shan, H. Model-Based Fault Diagnosis of Actuators in Electronically Controlled Air Suspension System. World Electr. Veh. J. 2022, 13, 219. [Google Scholar] [CrossRef]
- Chen, Z.; Peng, L.; Fan, J.; Chen, Z.; Peng, T.; Yang, C. Fault injection strategies for air brake system of high-speed train with AMESim/Simulink co-simulation. FAC-PapersOnLine 2022, 55, 803–808. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Features |
|---|---|
| Flange force sensor | 1000 kg; analog voltage signal |
| Air pressure transmitter | Range 0–4 MPa; analog voltage signal |
| Displacement sensor | Range 0–200 mm; analog voltage signal |
| Air pump | - |
| Air distribution valve | - |
| Air tank | Volume 10 L, pressure 1.5 MPa. |
| NO. | Measured Pressure/MPa | Measured Output Voltage/V | Controller Output Value/MPa | Absolute% |
|---|---|---|---|---|
| 1 | 0.10 | 0.52 | 0.19 | 0.92 |
| 2 | 0.20 | 0.64 | 0.29 | 0.47 |
| 3 | 0.30 | 0.75 | 0.39 | 0.29 |
| 4 | 0.40 | 0.87 | 0.49 | 0.22 |
| 5 | 0.50 | 1.00 | 0.60 | 0.20 |
| 6 | 0.60 | 1.10 | 0.69 | 0.14 |
| 7 | 0.70 | 1.21 | 0.78 | 0.11 |
| 8 | 0.80 | 1.32 | 0.87 | 0.09 |
| 9 | 0.90 | 1.45 | 0.98 | 0.09 |
| 10 | 1.00 | 1.56 | 1.08 | 0.08 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Zhang, Y.; Qu, B.; Tian, X.; Zhu, Q. Development of Static Test Equipment and a System for Lever-Loaded Air Springs. Actuators 2024, 13, 231. https://doi.org/10.3390/act13070231
Zhao S, Zhang Y, Qu B, Tian X, Zhu Q. Development of Static Test Equipment and a System for Lever-Loaded Air Springs. Actuators. 2024; 13(7):231. https://doi.org/10.3390/act13070231
Chicago/Turabian StyleZhao, Shengli, Yirui Zhang, Baojun Qu, Xiangyu Tian, and Qijun Zhu. 2024. "Development of Static Test Equipment and a System for Lever-Loaded Air Springs" Actuators 13, no. 7: 231. https://doi.org/10.3390/act13070231