
Model-Free Adaptive Predictive Tracking Control for High-Speed Trains Considering Quantization Effects and Denial-of-Service Attacks

Abstract
1. Introduction
- (1)
- For high-speed train systems with complex models, the systems are transformed into equivalent data-relational descriptions using dynamic linearization techniques, and then a model-free adaptive predictive control strategy is proposed.
- (2)
- Periodic DoS attacks and speed error quantization effects are considered, and a rigorous theoretical analysis shows that the system remains stable with the proposed strategy even under DoS attacks and speed error quantization effects.
2. Preparatory Discussion and Problem Statement
2.1. High-Speed Train Model
2.2. Controller Design
2.3. PPD Estimation Algorithm and Prediction Algorithm
- 1.
- Select the controller parameter to satisfy the inequality in Equation (11);
- 2.
- Constrain the parameter η within the interval ;
- 3.
- Ensure that the parameters μ and κ are both positive ();
- 4.
- Typically set the constant ϵ to .
2.4. Quantifier Model
2.5. DoS Attack Model
| Algorithm 1 MFAPC Algorithm |
|
3. Stability Analysis
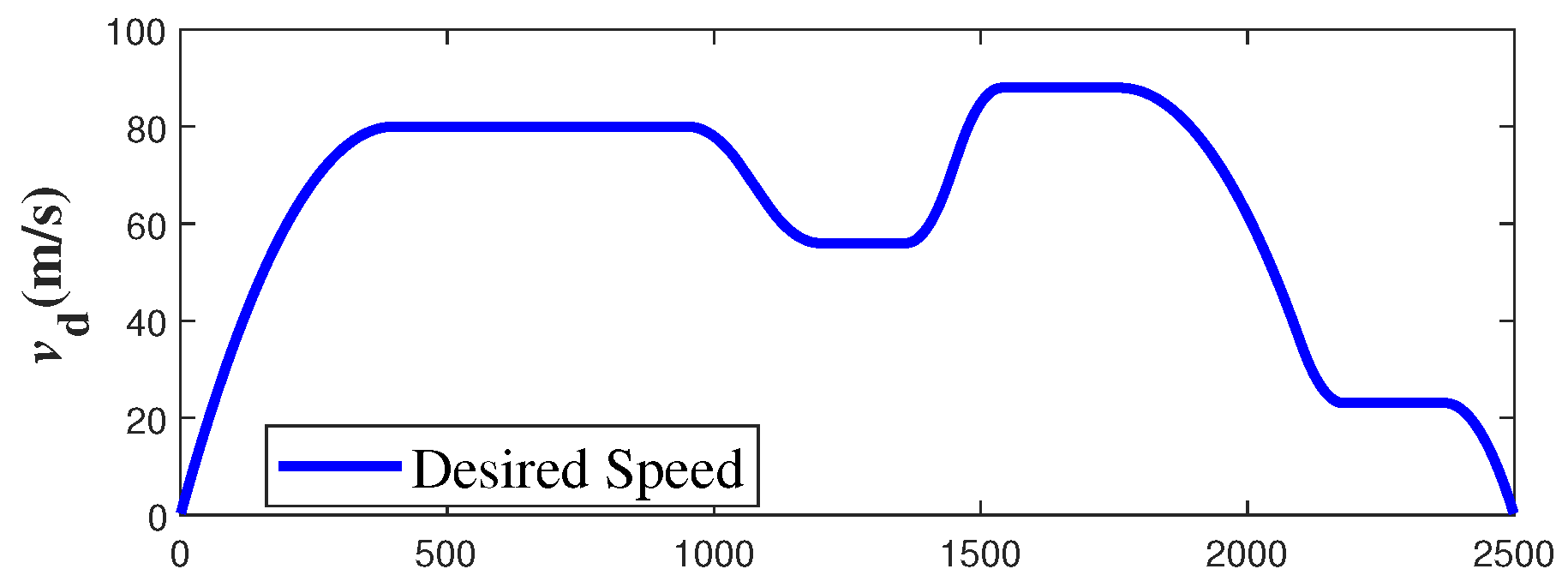
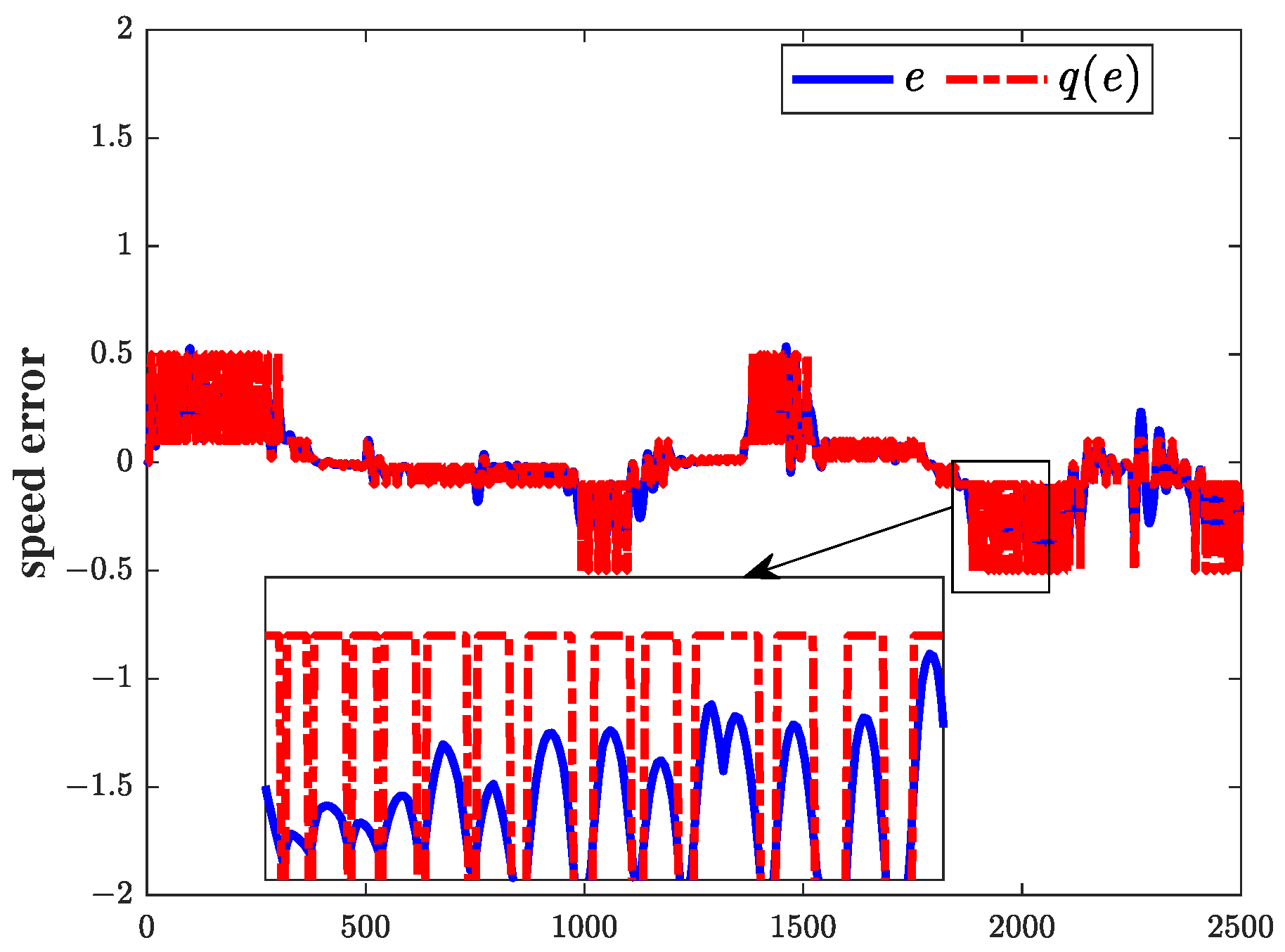
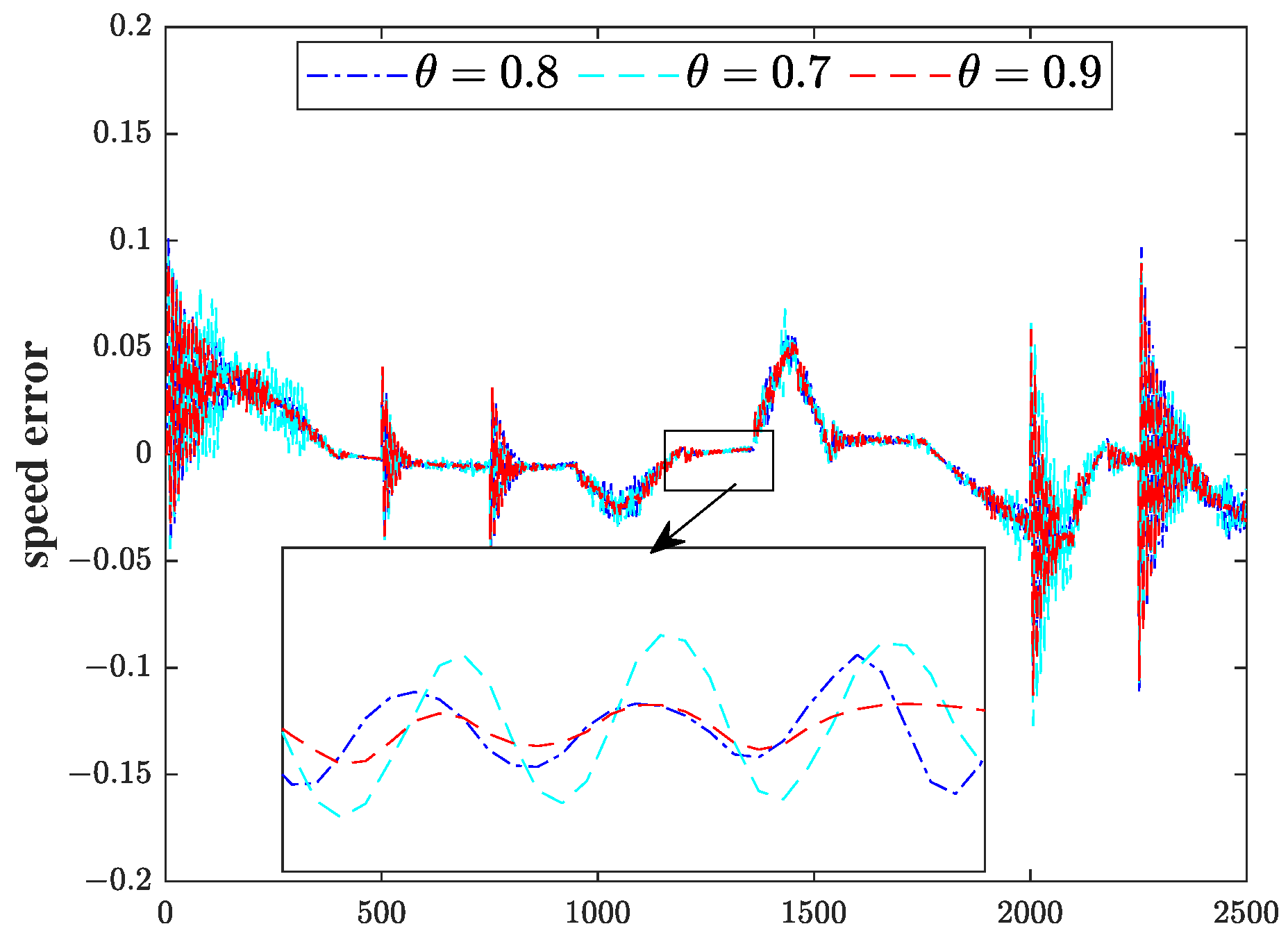
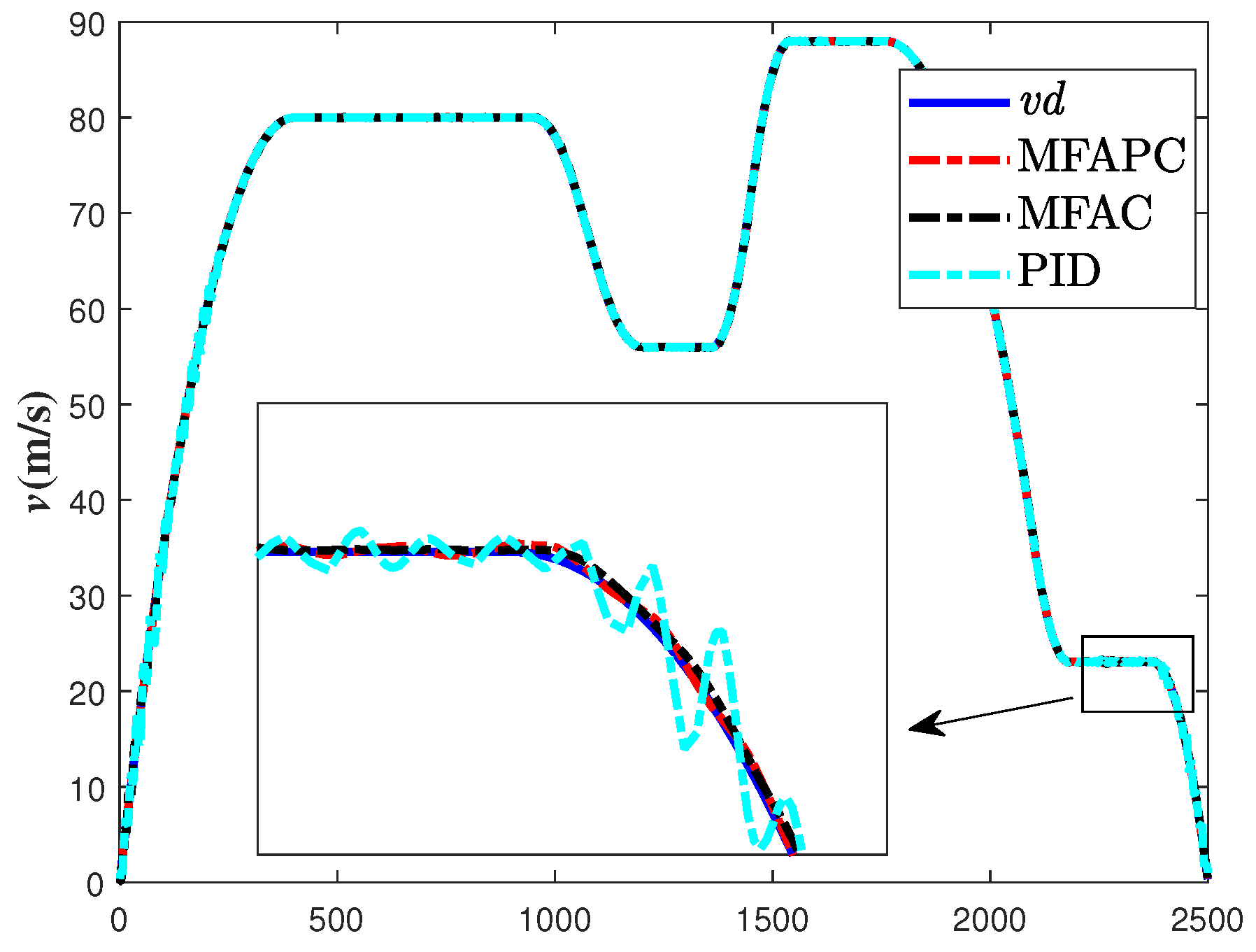
4. Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, H.; Jiang, B. A review of fault detection and diagnosis for the traction system in high-speed trains. IEEE Trans. Intell. Transp. Syst. 2019, 21, 450–465. [Google Scholar] [CrossRef]
- Cao, Y.; Zhang, Z.; Cheng, F.; Su, S. Trajectory optimization for high-speed trains via a mixed integer linear programming approach. IEEE Trans. Intell. Transp. Syst. 2022, 23, 17666–17676. [Google Scholar] [CrossRef]
- Dong, H.; Ning, B.; Cai, B.; Hou, Z. Automatic train control system development and simulation for high-speed railways. IEEE Circuits Syst. Mag. 2010, 10, 6–18. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, S.; Li, S.; Yang, L.; De Schutter, B. Hierarchical model predictive control for on-line high-speed railway delay management and train control in a dynamic operations environment. IEEE Trans. Control. Syst. Technol. 2022, 30, 2344–2359. [Google Scholar] [CrossRef]
- Tong, Y.; Ren, Z.; Tong, D.; Fan, Z.; Feng, X. Combined finite-time state feedback for high-speed train systems with time-varying delays and disturbances. Int. J. Robust Nonlinear Control 2024, 34, 2184–2205. [Google Scholar] [CrossRef]
- Zhao, H.; Dai, X.W. Event-triggered adaptive control for multiple high-speed trains with deception attacks in bottleneck sections. Inf. Sci. 2021, 547, 470–481. [Google Scholar] [CrossRef]
- Lin, P.; Huang, Y.; Zhang, Q.; Yuan, Z. Distributed velocity and input constrained tracking control of high-speed train systems. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 7882–7888. [Google Scholar] [CrossRef]
- Wang, X.; Zhu, L.; Wang, H.; Tong, T.; Li, K. Robust distributed cruise control of multiple high-speed trains based on disturbance observer. IEEE Trans. Intell. Transp. Syst. 2019, 22, 267–279. [Google Scholar] [CrossRef]
- Hou, Z.; Xiong, S. On model-free adaptive control and its stability analysis. IEEE Trans. Autom. Control 2019, 64, 4555–4569. [Google Scholar] [CrossRef]
- Qiu, X.; Wang, Y.; Zhang, H.; Xie, X. Resilient model free adaptive distributed LFC for multi-area power systems against jamming attacks. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 4120–4129. [Google Scholar] [CrossRef]
- Ma, Y.; Che, W.; Deng, C.; Wu, Z.-G. Distributed model-free adaptive control for learning nonlinear MASs under DoS attacks. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 1146–1155. [Google Scholar] [CrossRef]
- Wang, Q.; Jin, S.; Hou, Z. Data-driven event-triggered cooperative control for multiple subway trains with switching topologies. IEEE Trans. Intell. Transp. Syst. 2021, 23, 14702–14711. [Google Scholar] [CrossRef]
- Yu, W.; Ma, J.; Huang, D. Model Free Adaptive Trajectory Tracking for Multiple High-Speed Trains with I/O Saturations. In Proceedings of the 2024 IEEE International Conference on Industrial Technology, Bristol, UK, 6–8 March 2024; pp. 1–6. [Google Scholar]
- Yu, W.; Huang, D.; Dong, H. Faded Communication-Based Coordinated Model-Free Adaptive Iterative Learning Control of Multiple HSTs Against Denial-of-Service Attacks. IEEE Trans. Autom. Sci. Eng. 2023, 1–13. [Google Scholar] [CrossRef]
- Wang, Q.; Jin, S.; Hou, Z.; Gao, G. Model-free adaptive and iterative learning composite control for subway train under actuator faults. Int. J. Robust Nonlinear Control 2023, 33, 1772–1784. [Google Scholar] [CrossRef]
- Yu, W.; Huang, D.; Qin, N. Resilient coordinated data-driven control of multiple high-speed trains under fading measurements and denial-of-service attacks. IEEE Trans. Veh. Technol. 2023, 72, 5690–5701. [Google Scholar] [CrossRef]
- Li, F.; Hou, Z. Event-Triggered Model-Free Adaptive Predictive Control for Networked Control Systems Under Deception Attacks. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 1325–1334. [Google Scholar] [CrossRef]
- Pan, Z.; Chi, R.; Hou, Z. Distributed Model-Free Adaptive Predictive Control for MIMO Multi-Agent Systems with Deception Attack. IEEE Trans. Signal Inf. Process. Over Netw. 2024, 10, 32–47. [Google Scholar] [CrossRef]
- Liu, W.; Sun, J.; Wang, G.; Bullo, F.; Chen, J. Data-driven resilient predictive control under denial-of-service. IEEE Trans. Autom. Control 2022, 68, 4722–4737. [Google Scholar] [CrossRef]
- Zhao, H.; Dai, X.; Ding, L.; Cui, D.; Ding, J.; Chai, T. Resilient cooperative control for high-speed trains under denial-of-service attacks. IEEE Trans. Veh. Technol. 2021, 70, 12427–12436. [Google Scholar] [CrossRef]
- Li, Z.; Zhou, C.; Che, W.; Deng, C.; Jin, X. Data-based security fault tolerant iterative learning control under denial-of-service attacks. Actuators 2022, 11, 178. [Google Scholar] [CrossRef]
- Gu, Z.; Sun, X.; Lam, H.K.; Yue, D.; Xie, X. Event-based secure control of T–S fuzzy-based 5-DOF active semivehicle suspension systems subject to DoS attacks. IEEE Trans. Fuzzy Syst. 2021, 30, 2032–2043. [Google Scholar] [CrossRef]
- Yin, J.; Lu, A. Observer-Based Active Control Strategy for Networked Switched Systems against Two-Channel Asynchronous DoS Attacks. Actuators 2023, 12, 335. [Google Scholar] [CrossRef]
- Gao, Z.; Song, Y. Adaptive quantized control based on output feedback for nonlinear systems with sensor faults under intermittent DoS attacks. Int. J. Robust Nonlinear Control. 2024. [Google Scholar] [CrossRef]
- Qi, Y.; Guo, S.; Tang, Y. Optimal Output Tracking for Switched Systems Under DoS Attacks: A Model-Free Adaptive Predictive Control Method. IEEE Trans. Circuits Syst. II Express Briefs 2024, 71, 266–270. [Google Scholar] [CrossRef]
- Liu, Y.; Ling, Q. Event-triggered stabilization of linear systems under quantization and denial-of-service attacks. Int. J. Robust Nonlinear Control 2024, 34, 1196–1216. [Google Scholar] [CrossRef]
- He, Y.; Chen, Y.; Pan, C.; Ali, I. Privacy-Preserving Distributed Optimal Control for Vehicular Platoon with Quantization. IEEE Trans. Intell. Transp. Syst. 2024, 1–14. [Google Scholar] [CrossRef]
- Cheng, J.; Shan, Y.; Cao, J.; Park, J.H. Nonstationary control for T–S fuzzy Markovian switching systems with variable quantization density. IEEE Trans. Fuzzy Syst. 2020, 29, 1375–1385. [Google Scholar] [CrossRef]
- Guo, S.; Zhao, X.; Wang, H.; Xu, N. Distributed consensus of heterogeneous switched nonlinear multiagent systems with input quantization and DoS attacks. Appl. Math. Comput. 2023, 456, 128127. [Google Scholar] [CrossRef]
- Ning, Z.; Feng, G.; Yin, X. Asynchronous quantized control of piecewise-affine systems. IEEE Trans. Autom. Control 2023, 69, 503–510. [Google Scholar] [CrossRef]
- Cai, B.; Ning, Z.; Cheng, Y.; Tian, Y. Quantized stabilizing control of state-dependent switching affine systems with control-input and state-measurement quantization. Int. J. Robust Nonlinear Control 2024, 34, 4014–4031. [Google Scholar] [CrossRef]
- Ning, J.; Huang, Y.; Liu, Z.; Li, W.; Yue, X. Adaptive Distributed Heterogeneous Formation Control for UAV-USVs with Input Quantization. J. Mar. Sci. Eng. 2024, 12, 975. [Google Scholar] [CrossRef]
- Zhang, N.; Chen, G.; Xia, J.; Park, J.H.; Xie, X. Quantization-Based Adaptive Fuzzy Consensus for Multiagent Systems Under Sensor Deception Attacks: A Novel Compensation Mechanism. IEEE Trans. Cybern. 2024, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Deng, F.; Yu, P. Event-triggered control of Itô stochastic nonlinear delayed systems with state quantization. Int. J. Robust Nonlinear Control 2024, 34, 3167–3188. [Google Scholar] [CrossRef]
- Yu, W.; Huang, D.; Xu, K. Active quantizer-based model-free adaptive consensus tracking for multiple HSTs against sensor bias. IEEE Trans. Intell. Veh. 2024, 9, 2139–2148. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| the train speed | |
| the train traction/braking force | |
| T | the sampling step size |
| k | the sampling moment |
| the train’s additional resistance | |
| tunnel resistance | |
| , , | unknown resistance coefficients |
| the inverse of a matrix | |
| transposing the matrix | |
| taking the expectations for |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Wang, F. Model-Free Adaptive Predictive Tracking Control for High-Speed Trains Considering Quantization Effects and Denial-of-Service Attacks. Actuators 2024, 13, 301. https://doi.org/10.3390/act13080301
Wang D, Wang F. Model-Free Adaptive Predictive Tracking Control for High-Speed Trains Considering Quantization Effects and Denial-of-Service Attacks. Actuators. 2024; 13(8):301. https://doi.org/10.3390/act13080301
Chicago/Turabian StyleWang, Dan, and Fuzhong Wang. 2024. "Model-Free Adaptive Predictive Tracking Control for High-Speed Trains Considering Quantization Effects and Denial-of-Service Attacks" Actuators 13, no. 8: 301. https://doi.org/10.3390/act13080301
APA StyleWang, D., & Wang, F. (2024). Model-Free Adaptive Predictive Tracking Control for High-Speed Trains Considering Quantization Effects and Denial-of-Service Attacks. Actuators, 13(8), 301. https://doi.org/10.3390/act13080301