
Biomechanical Characterization of Preparation for Airs above the Ground: A Mixed Approach


Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Background to the Development of Methods
2.2. Subjects and Procedure
2.3. Data Collection
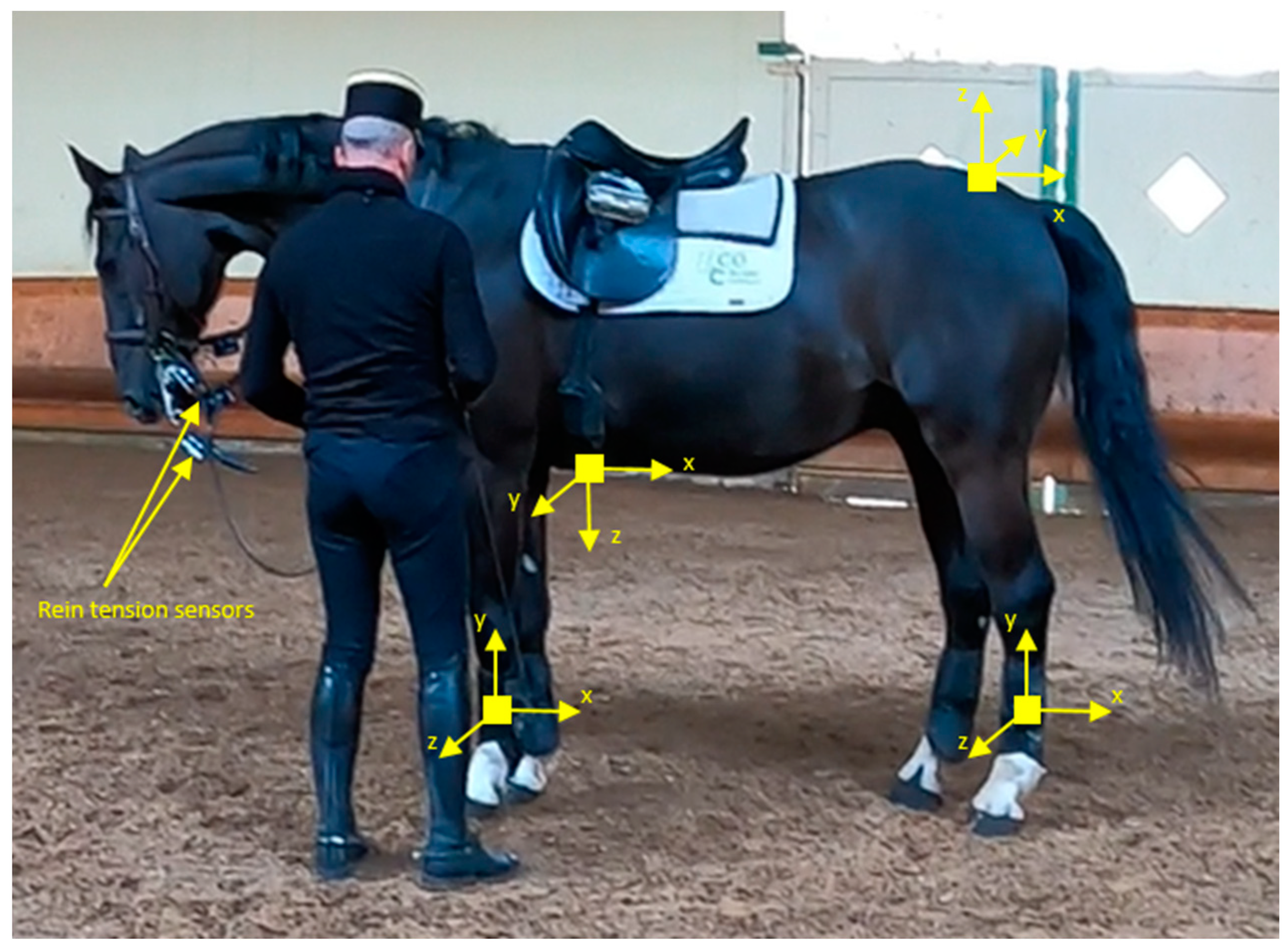
2.3.1. Motion Transducers
2.3.2. Rein Tension Transducers
2.4. Data Analysis
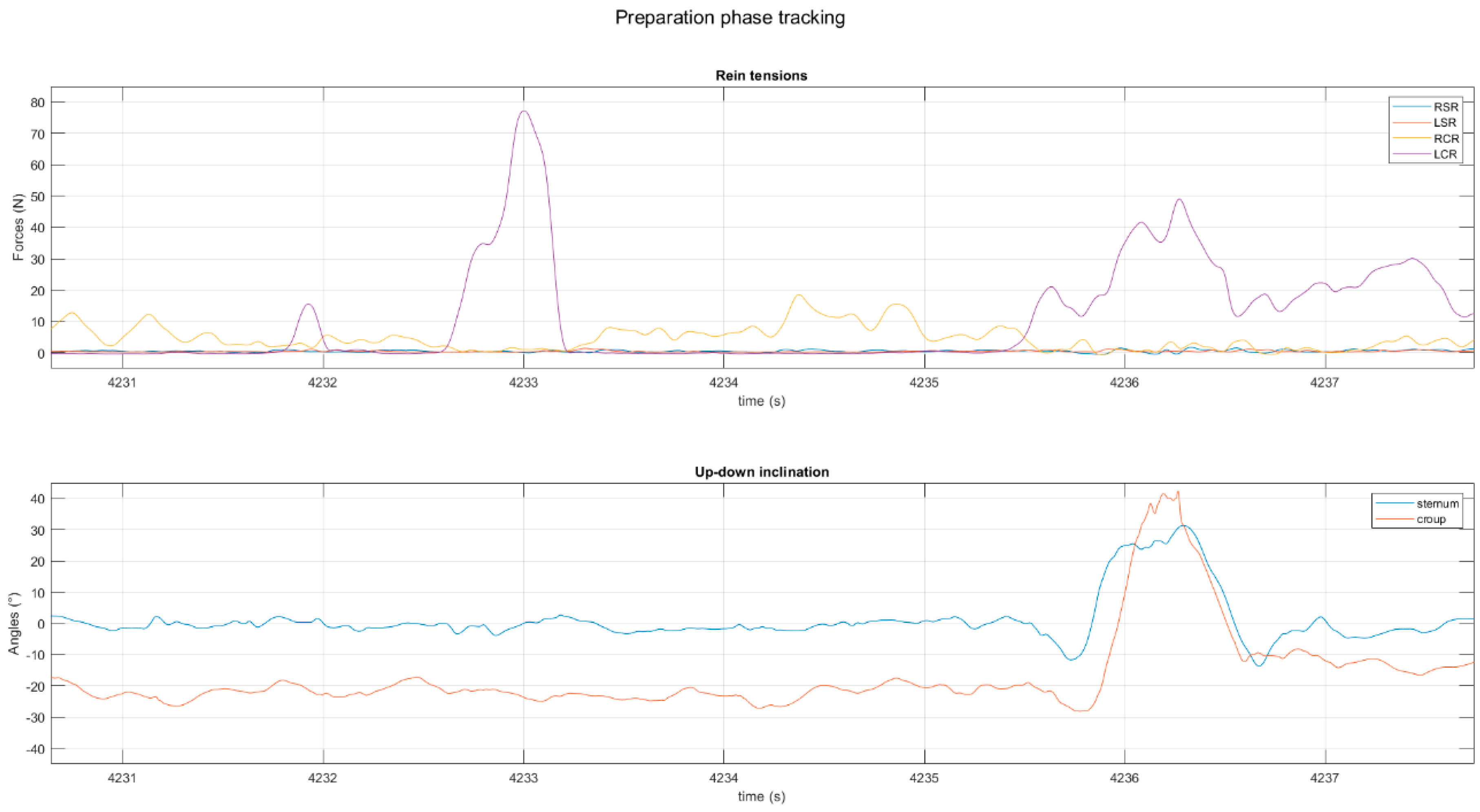
2.4.1. Delimitation of the Preparation Phase
2.4.2. Calculated Variables
2.5. Statistical Analysis
3. Results
3.1. Courbette vs. Croupade
3.2. Écuyer V vs. Écuyer G
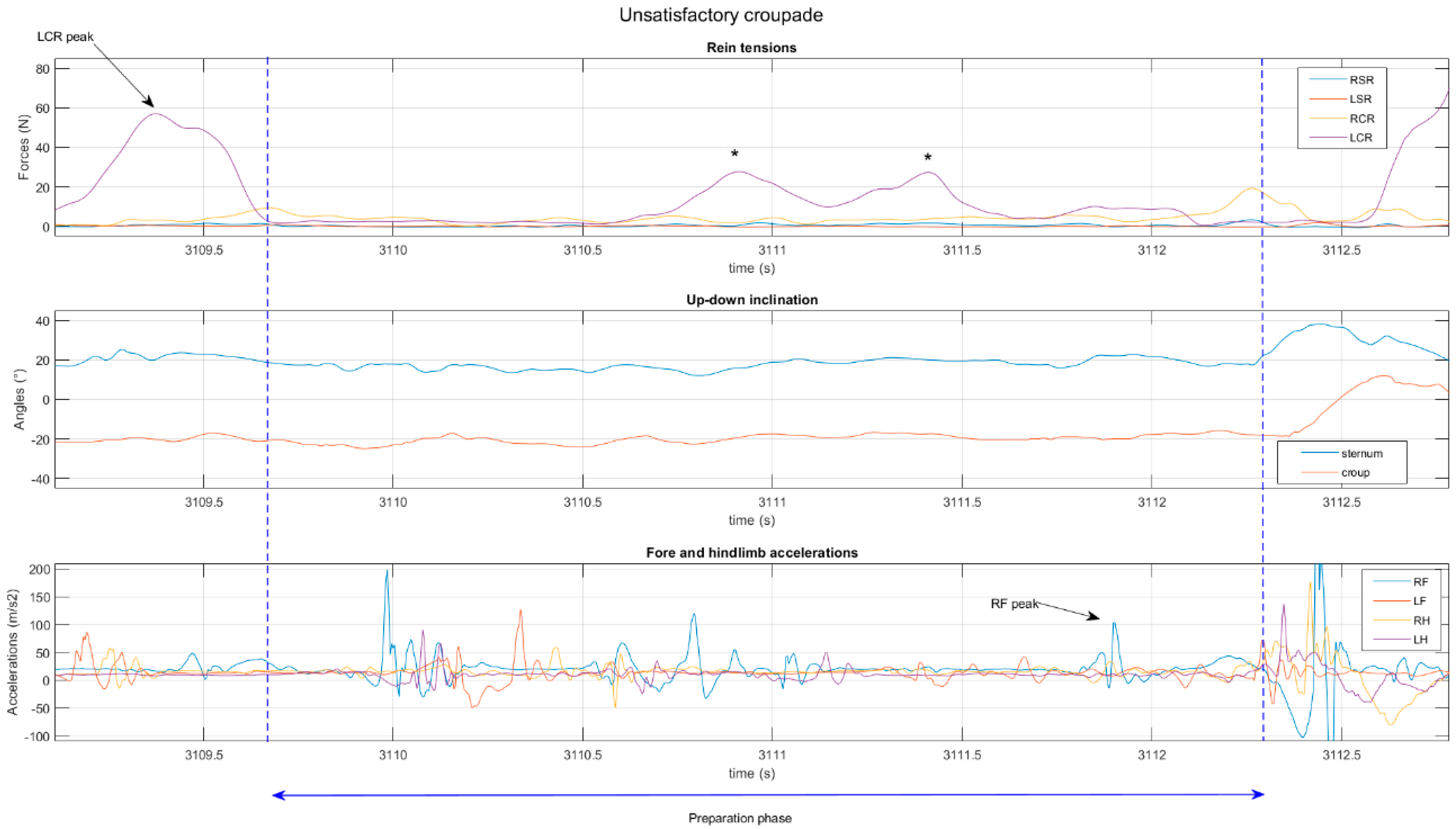
3.3. Quality of the AAGs (Unsatisfactory vs. Satisfactory)
4. Discussion
4.1. The Three Classes of Biomechanical Indicators of the Pattern of Écuyer–Horse Interaction in the Performance of AAGs
4.2. The Role of the Reins
4.3. Regularity and Variety in the Work of Expert Écuyers
4.4. The Difficult Biomechanical Characterization of AAG Quality
4.5. The Interest of Mixed Methods for Understanding Human–Horse Interactions
4.6. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Up–Down Inclination Angle
References
- UNESCO. Equitation in the French Tradition: N° 00440. Available online: https://ich.unesco.org/en/RL/equitation-in-the-french-tradition-00440?RL=00440 (accessed on 12 December 2023).
- Equipédia. The Airs above the Ground. Available online: https://equipedia.ifce.fr/en/equipedia-the-universe-of-the-horse-ifce/riding/olympic-disciplines/dressage/the-airs-above-the-ground (accessed on 12 December 2023).
- Barry, J.-C. Traité des Airs Relevés; Belin Editions: Paris, France, 2005. [Google Scholar]
- De La Guérinière, F.R. École de Cavalerie; Imprimerie Jacques Collombat Edition: Paris, France, 1733. [Google Scholar]
- Leblanc, M.; Huet, B.; Saury, J. “Contact” as a manifestation of sensorimotor empathy in the experience of expert écuyers in interaction with horses. J. Conscious. Stud. 2022, 29, 80–107. [Google Scholar] [CrossRef]
- Piccolo, L.; Kienapfel, K. Voluntary Rein Tension in Horses When Moving Unridden in a Dressage Frame Compared with Ridden Tests of the Same Horses—A Pilot Study. Animals 2019, 9, 321. [Google Scholar] [CrossRef] [PubMed]
- Warren-Smith, A.K.; Curtis, R.A.; Greetham, L.; McGreevy, P.D. Rein contact between horse and handler during specific equitation movements. Appl. Anim. Behav. Sci. 2007, 108, 157–169. [Google Scholar] [CrossRef]
- Clayton, H.M.; Larson, B.; Kaiser, L.J.; Lavagnino, M. Length and elasticity of side reins affect rein tension at trot. Vet. J. 2011, 188, 291–294. [Google Scholar] [CrossRef] [PubMed]
- Biau, S.; Debril, J.F.; Lacouture, P. Biomechanics of School Jumps. 40ème Journée de la Recherche Équine 2014, Épidémiologie et Pathologie, Paris. Available online: https://mediatheque.ifce.fr/index.php?lvl=notice_display&id=49127 (accessed on 17 November 2023).
- Barry, J.-C. French Touch: The Classical Approach to Harmony and Lightness in Timeless Dressage. 2010. Available online: https://www.blurb.com/b/1415797-french-touch (accessed on 3 January 2024).
- Clayton, H.M.; Hobbs, S.J. The role of biomechanical analysis of horse and rider in equitation science. Appl. Anim. Behav. Sci. 2017, 190, 123–132. [Google Scholar] [CrossRef]
- Dumbell, L.; Lemon, C.; Williams, J. A systematic literature review to evaluate the tools and methods used to measure rein tension. J. Vet. Behav. 2019, 29, 77–87. [Google Scholar] [CrossRef]
- Huet, B.; Leblanc, M.; Biau, S.; Pycik, E.; Saury, J. Utiliser la Vidéo Pour le Développement de Dispositions à Agir dans des Pratiques Professionnelles à Forte Dimension Sensorimotrice. Le cas de la Formation au Travail à la Main au Cadre Noir de Saumur. Éducation & didactique, Forthcoming. Available online: https://journals.openedition.org/educationdidactique/ (accessed on 17 November 2023).
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG Orientation Using a Gradient Descent Algorithm. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; Volume 32. [Google Scholar] [CrossRef]
- Barrey, E. Methods, applications and limitations of gait analysis in horses. Vet J. 1999, 157, 7–22. [Google Scholar] [CrossRef]
- Clayton, H.M.; Hobbs, S.J. An exploration of strategies used by dressage horses to control moments around the center of mass when performing passage. PeerJ 2017, 5, e3866. [Google Scholar] [CrossRef]
- Clayton, H.M.; Hobbs, S.J. Ground Reaction Forces: The Sine Qua Non of Legged Locomotion. J. Equine Vet. Sci. 2019, 76, 25–35. [Google Scholar] [CrossRef]
- Dunbar, D.C.; Macpherson, J.M.; Simmons, R.W.; Zarcades, A. Stabilization and mobility of the head, neck and trunk in horses during overground locomotion: Comparisons with humans and other primates. J. Exp. Biol. 2008, 211 Pt 24, 3889–3907. [Google Scholar] [CrossRef] [PubMed]
- Manfredi, J.M.; Rosenstein, D.; Lanovaz, J.L.; Nauwelaerts, S.; Clayton, H.M. Fluoroscopic study of oral behaviours in response to the presence of a bit and the effects of rein tension. Comp. Exerc. Physiol. 2009, 6, 143–148. [Google Scholar] [CrossRef]
- Clot, Y.; Faïta, D.; Fernandez, G.; Scheller, L. Entretiens en autoconfrontation croisée: Une méthode en clinique de l’activité. Perspect. Interdiscip. Trav. Santé 2000. [Google Scholar] [CrossRef]
- Biau, S.; Barrey, E. Relationships between stride characteristics and scores in dressage tests. Pferdeheilkunde Equine Med. 2004, 20, 140–144. [Google Scholar] [CrossRef]
- Hobbs, S.J.; Serra Braganca, F.M.; Rhodin, M.; Hernlund, E.; Peterson, M.; Clayton, H.M. Evaluating Overall Performance in High-Level Dressage Horse–Rider Combinations by Comparing Measurements from Inertial Sensors with General Impression Scores Awarded by Judges. Animals 2023, 13, 2496. [Google Scholar] [CrossRef] [PubMed]
- Fédération Equestre Internationale. Dressage Rules 25th Edition. 2020. Available online: https://inside.fei.org/fei/regulations/past#fei-dressage--fei-para-dressage-rules (accessed on 3 January 2024).
- Ganachaud, C.; Ganière, C.; Hacques, G.; Rochat, N.; Seifert, L.; Adé, D. Exploring in a climbing task during a learning protocol: A complex sense-making process. Psychol. Res. 2023, 87, 2365–2379. [Google Scholar] [CrossRef] [PubMed]
- Seifert, L.; Lardy, J.; Bourbousson, J.; Adé, D.; Nordez, A.; Thouvarecq, R.; Saury, J. Interpersonal Coordination and Individual Organization Combined with Shared Phenomenological Experience in Rowing Performance: Two Case Studies. Front. Psychol. 2017, 8, 75. [Google Scholar] [CrossRef] [PubMed]
- Terrien, E.; Huet, B.; Saury, J. Controlling the flight on double-handed foiling catamarans: The role of shared equipment on the crew members’ mutual modes of regulation. Psychol. Sport Exerc. 2022, 61, 102204. [Google Scholar] [CrossRef]
- Kostulski, K.; Kloetzer, L. Controversy as a Developmental Tool in Cross Self-Confrontation Analysis. Outl. Crit. Pract. Stud. 2014, 15, 54–73. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Variables | Description |
|---|---|
| PP_Time (s) | Preparation phase duration, expressed in second |
| Contact | |
| LCR_peak (N) | Maximal value of the left curb rein tensions for the five-second period before the start of the AAG, expressed in newtons |
| LCR_mean (N) | Mean value of the left curb rein tensions during the preparation phase, expressed in newtons |
| LCR_std (N) | Standard deviation of the left curb rein tensions during the preparation phase, expressed in newtons |
| RCR_mean (N) | Mean value of the right curb rein tensions during the preparation phase, expressed in newtons |
| RCR_std (N) | Standard deviation of the right curb rein tensions during the preparation phase, expressed in newtons |
| LSR_mean (N) | Mean value of the left snaffle rein tensions during the preparation phase, expressed in newtons |
| LSR_std (N) | Standard deviation of the left snaffle rein tensions during the preparation phase, expressed in newtons |
| RSR_mean (N) | Mean value of the right snaffle rein tensions during the preparation phase, expressed in newtons |
| RSR_std (N) | Standard deviation of the right snaffle rein tensions during the preparation phase, expressed in newtons |
| Balance | |
| FE_croup (°) | Croup inclination angle at the beginning of the preparation phase, position relative to a horizontal axis, expressed in degrees |
| FE_sternum (°) | Sternum inclination angle at the beginning of the preparation phase, position relative to a horizontal axis expressed in degrees |
| FE_croup_mean (°) | Mean of croup inclination angles during the preparation phase, mean position relative to a horizontal axis expressed in degrees |
| FE_sternum_mean (°) | Mean of sternum inclination angles during the preparation phase, mean position relative to a horizontal axis expressed in degrees |
| Hoof-beat | |
| H_peaks (m/s2) | Vertical acceleration peak value of the right and left hindlimbs of the last propulsion before the AAG, expressed in m/s2 |
| F_peaks (m/s2) | Vertical acceleration peak value of the right and left forelimbs of the last propulsion before the AAG, expressed in m/s2 |
| Statistics | Mean ± Std | Courbette | Croupade | p-Values Croupade vs. Courbette | Courbette − | Courbette + | p-Values Courbette + vs. − | Croupade − | Croupade + | p-Values Croupade + vs. − | Écuyer V | Écuyer G | p-Values Écuyer V vs. G | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| LCR_peak (N) | 65 ± 39 | 63 ± 42 | 67 ± 34 | 0.515 | 68 ± 53 | 58 ± 29 | 0.991 | 79 ± 31 | 55 ± 34 | 0.118 | 72 ± 31 | 60 ± 42 | 0.055 | |
| PP_Time (s) | 3.25 ± 1.95 | 2.9 ± 1.8 | 3.75 ± 2 | 0.072 | 3.2 ± 1.6 | 2.5 ± 2.1 | 0.134 | 4.3 ± 2.3 | 3.2 ± 1.6 | 0.247 | 4 ± 2 | 3 ± 2 | 0.692 | |
| Hoof-beat | F_peaks (m/s2) | 317 ± 148 | 320 ± 137 | 314 ± 161 | 0.699 | 356 ± 162 | 286 ± 104 | 0.23 | 334 ± 161 | 294 ± 168 | 0.436 | 225 ± 80 | 276 ± 149 | 0.001 |
| H_peaks (m/s2) | 185 ± 124 | 237 ± 107 | 111 ± 106 | 0.001 | 198 ± 91 | 273 ± 110 | 0.055 | 128 ± 126 | 86 ± 78 | 0.585 | 88 ± 97 | 247 ± 94 | <0.0001 | |
| Contact | LCR_mean (N) | 6 ± 4 | 7 ± 4.5 | 5 ± 3 | 0.249 | 7 ± 4 | 6 ± 5 | 0.303 | 7 ± 4 | 4 ± 2 | 0.077 | 5 ± 4 | 6 ± 4 | 0.440 |
| LCR_std (N) | 7 ± 4 | 7 ± 4 | 7 ± 4 | 0.475 | 8 ± 4 | 6 ± 4 | 0.135 | 9 ± 5 | 4 ± 3 | 0.004 | 7 ± 5 | 7 ± 4 | 0.666 | |
| RCR_mean (N) | 4 ± 4 | 4 ± 4 | 3 ± 3 | 0.177 | 3 ± 3 | 5 ± 4 | 0.332 | 2 ± 3 | 3 ± 3 | 0.503 | 5 ± 4 | 3 ± 3 | 0.017 | |
| RCR_std (N) | 3 ± 3 | 3 ± 3 | 2 ± 2 | 0.176 | 3 ± 3 | 4 ± 4 | 0.288 | 1 ± 2 | 3 ± 2 | 0.184 | 4 ± 3 | 2 ± 2 | 0.071 | |
| LSR_mean (N) | <0.5 | <0.5 | <0.5 | <0.5 | <0.5 | <0.5 | <0.5 | <0.5 | <0.5 | |||||
| LSR_std (N) | <0.5 | <0.5 | <0.5 | <0.5 | <0.5 | <0.5 | <0.5 | <0.5 | <0.5 | |||||
| RSR_mean (N) | 6 ± 6 | 8 ± 7 | 3 ± 4 | 0.012 | 10 ± 7 | 6 ± 6 | 0.064 | 5 ± 5 | 1 ± 1 | 0.017 | 3 ± 4 | 8 ± 6 | 0.001 | |
| RSR_std (N) | 4 ± 4 | 5 ± 4 | 2 ± 2 | 0.010 | 7 ± 4 | 3 ± 3 | 0.022 | 3 ± 2 | 1 ± 1 | 0.115 | 2 ± 2 | 5 ± 4 | 0.000 | |
| Balance | FE_Croup (°) | −12 ± 9 | −12 ± 10 | −13 ± 7 | 0.482 | −10 ± 12 | −13 ± 7 | 0.804 | −14 ± 9 | −13 ± 6 | 0.81 | −16 ± 9 | −10 ± 8 | 0.018 |
| FE_sternum (°) | 13 ± 7 | 12 ± 12 | 11 ± 10 | 0.433 | 17 ± 12 | 11 ± 12 | 0.229 | 10 ± 9 | 12 ± 11 | 0.698 | 11 ± 11 | 13 ± 1 | 0.423 | |
| FE_croup_mean (°) | −15 ± 6 | −14 ± 6 | −16 ± 5 | 0.328 | −14 ± 7 | −15 ± 5 | 0.458 | −16 ± 5 | −16 ± 5 | 0.731 | −19 ± 4 | −12 ± 5 | <0.0001 | |
| FE_sternum_mean (°) | 13 ± 9 | 12 ± 9 | 15 ± 9 | 0.328 | 14 ± 9 | 10 ± 9 | 0.274 | 14 ± 9 | 16 ± 10 | 0.567 | 12 ± 11 | 14 ± 8 | 0.766 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Biau, S.; Leblanc, M.; Pycik, E.; Pasquiet, B.; Huet, B. Biomechanical Characterization of Preparation for Airs above the Ground: A Mixed Approach. Animals 2024, 14, 189. https://doi.org/10.3390/ani14020189
Biau S, Leblanc M, Pycik E, Pasquiet B, Huet B. Biomechanical Characterization of Preparation for Airs above the Ground: A Mixed Approach. Animals. 2024; 14(2):189. https://doi.org/10.3390/ani14020189
Chicago/Turabian StyleBiau, Sophie, Marine Leblanc, Eléna Pycik, Benoît Pasquiet, and Benoit Huet. 2024. "Biomechanical Characterization of Preparation for Airs above the Ground: A Mixed Approach" Animals 14, no. 2: 189. https://doi.org/10.3390/ani14020189