Two-Stage Stochastic Programming Scheduling Model for Hybrid AC/DC Distribution Network Considering Converters and Energy Storage System

 and
and
Abstract
:1. Introduction
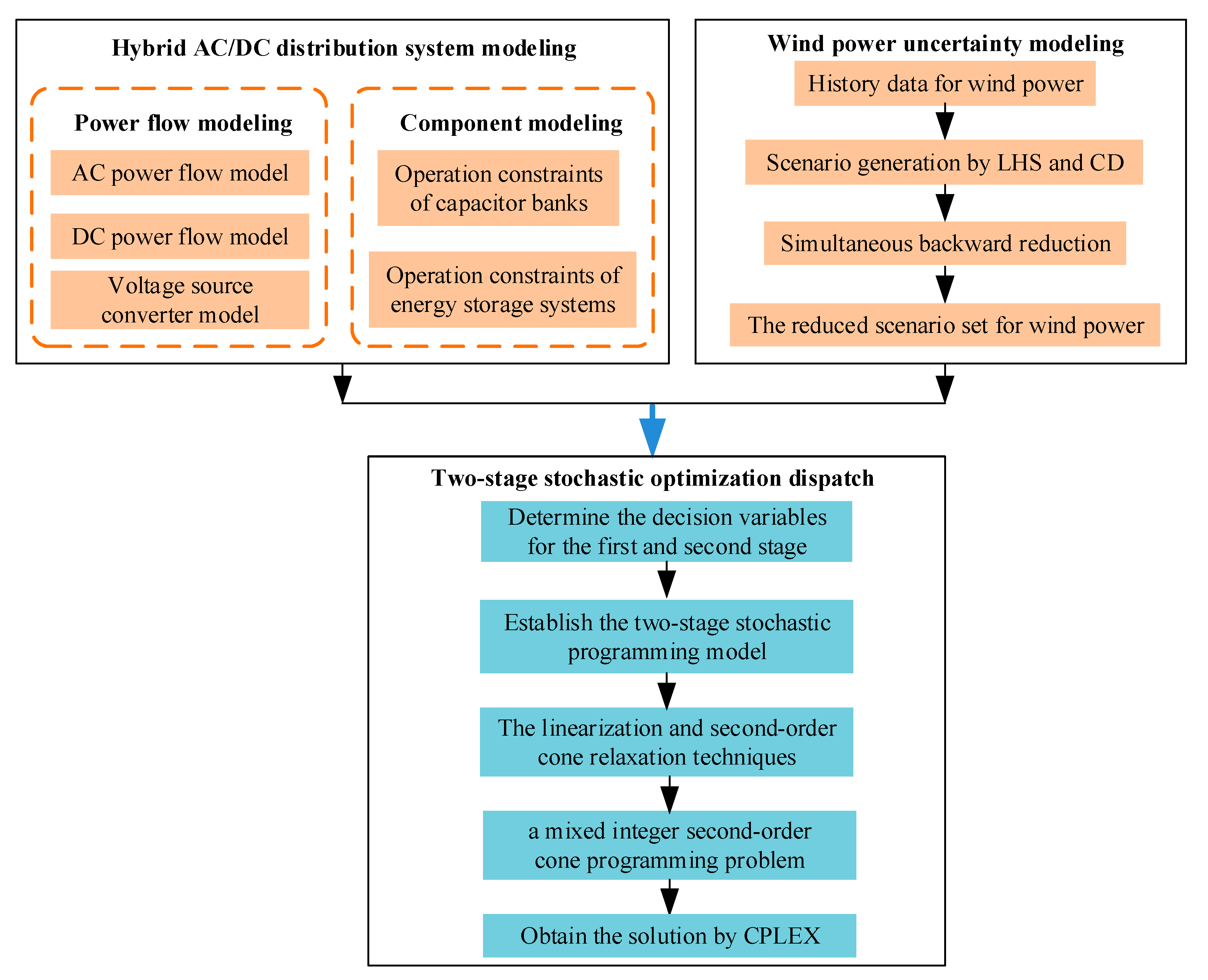
2. Power Flow Model for Hybrid AC/DC Distribution Network
2.1. AC Distribution Network Model
2.2. DC Distribution Network Model
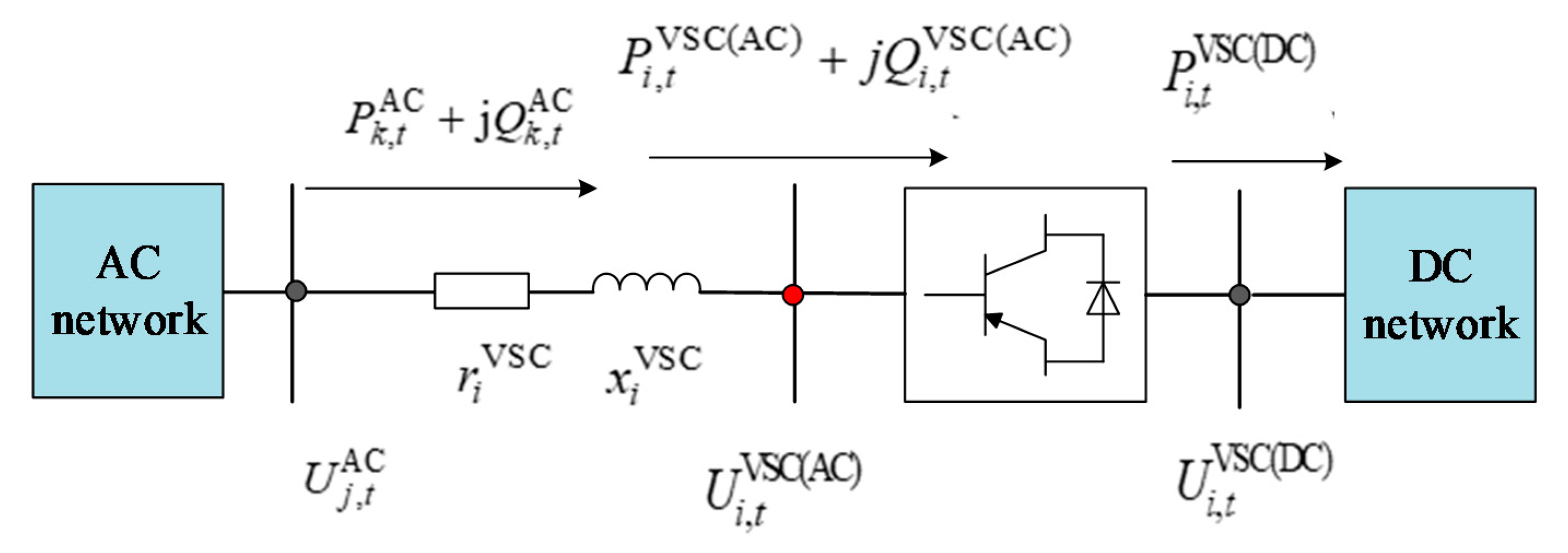
2.3. Voltage Source Converter Model
2.4. Second-Order Cone Relaxation for the Distribution System Model
3. Two-Stage Stochastic Scheduling Model for the Hybrid AC/DC Distribution Network
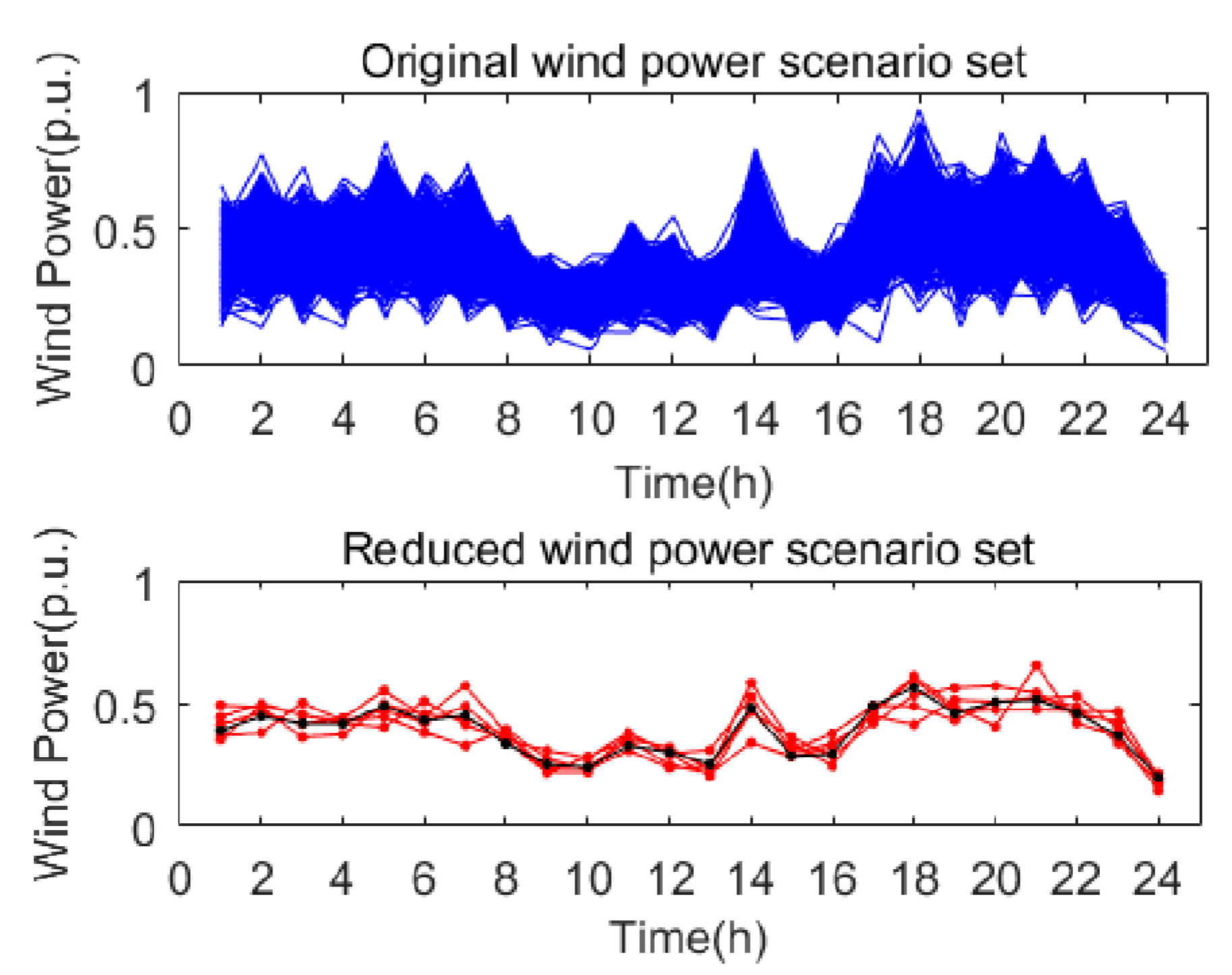
3.1. Scenario Generation and Reduction
3.2. Objective Function
3.3. Constraints for the Two-Stage Stochastic Programming
3.3.1. Operation Constraints of the Capacitor Bank
3.3.2. Operation Constraint of the Energy Storage System
3.3.3. Relevant Constraints of Two Stages
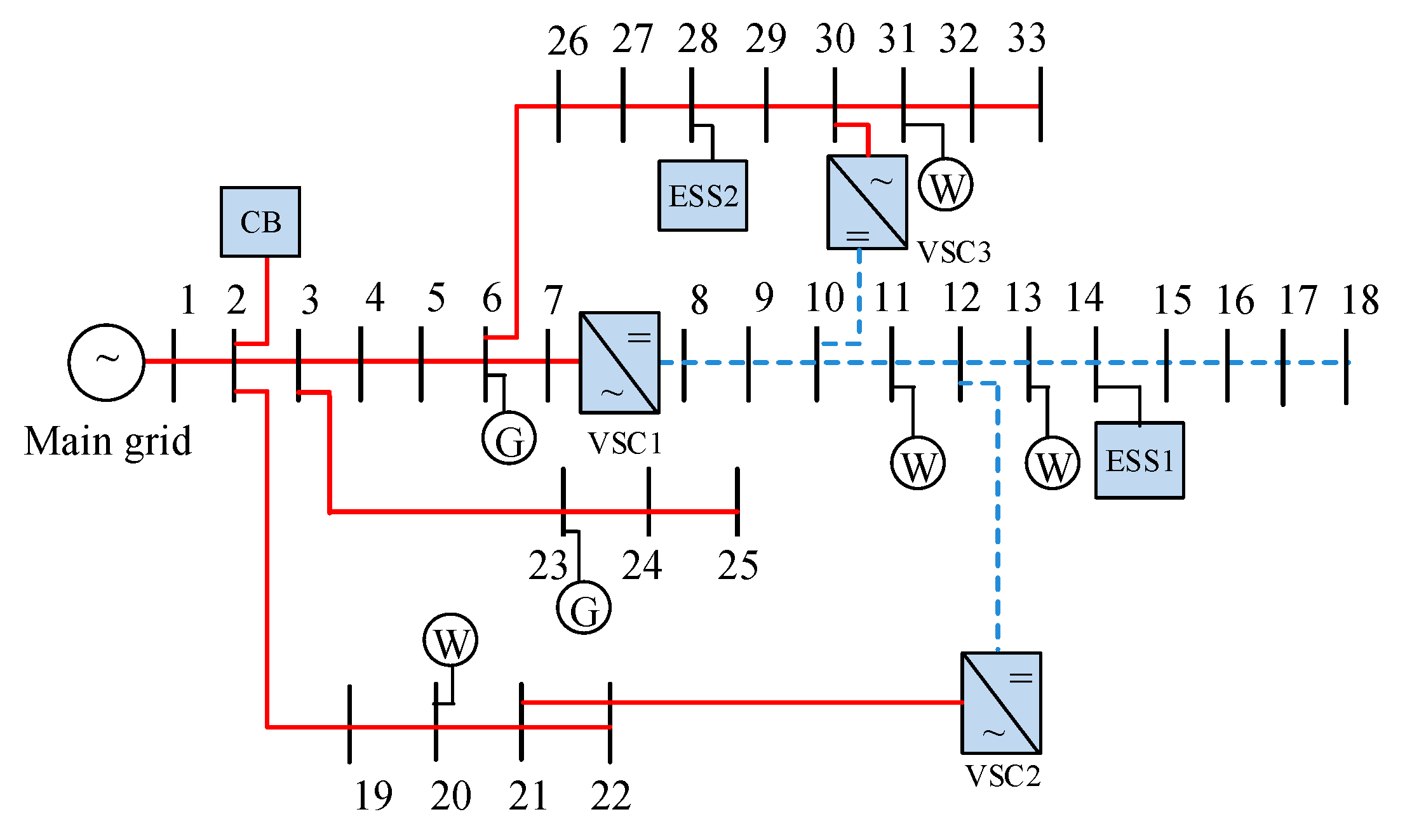
4. Case Studies
- Case 1:
- Day-ahead scheduling for the hybrid distribution system with CB considering the wind power prediction curve;
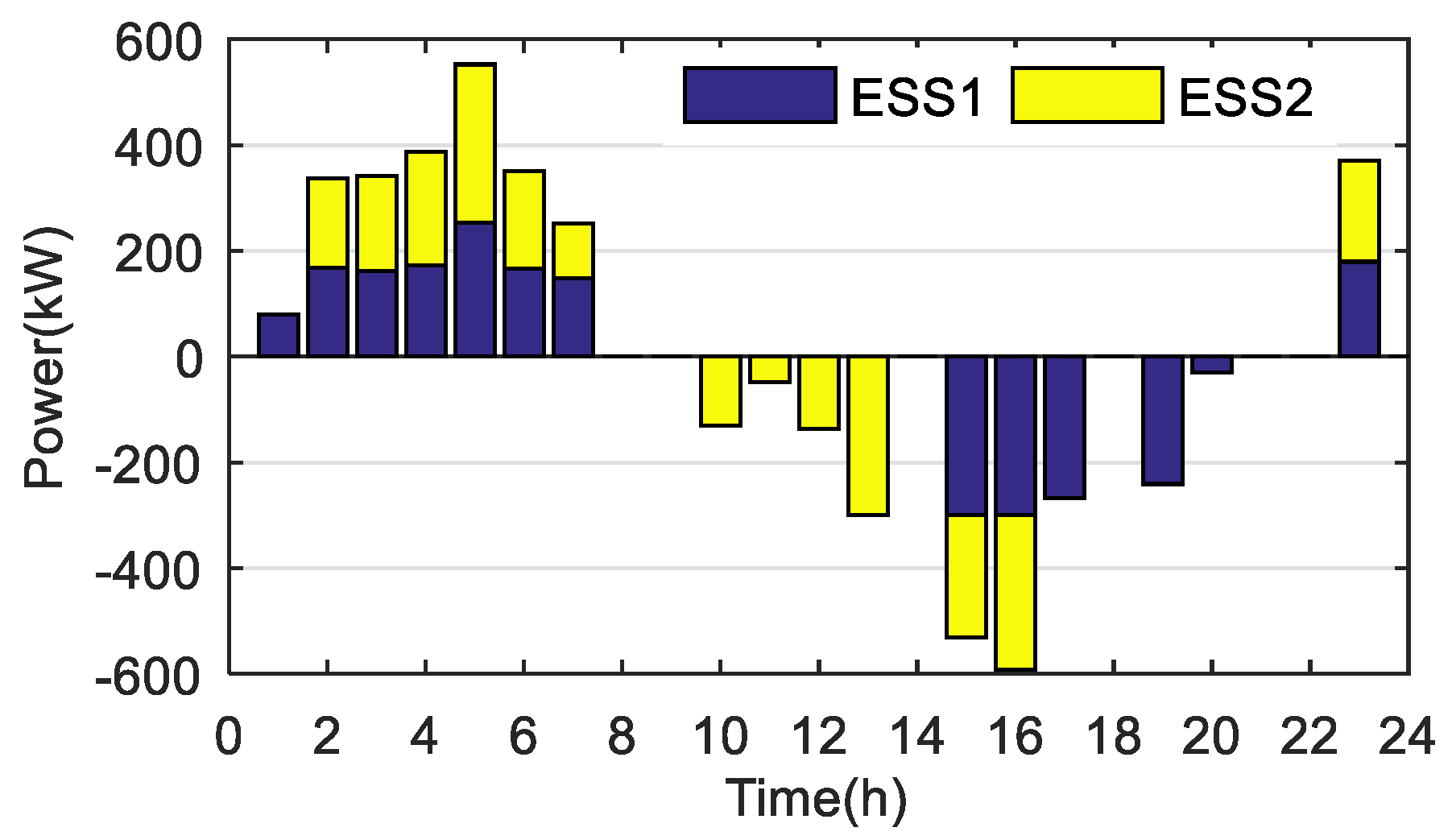
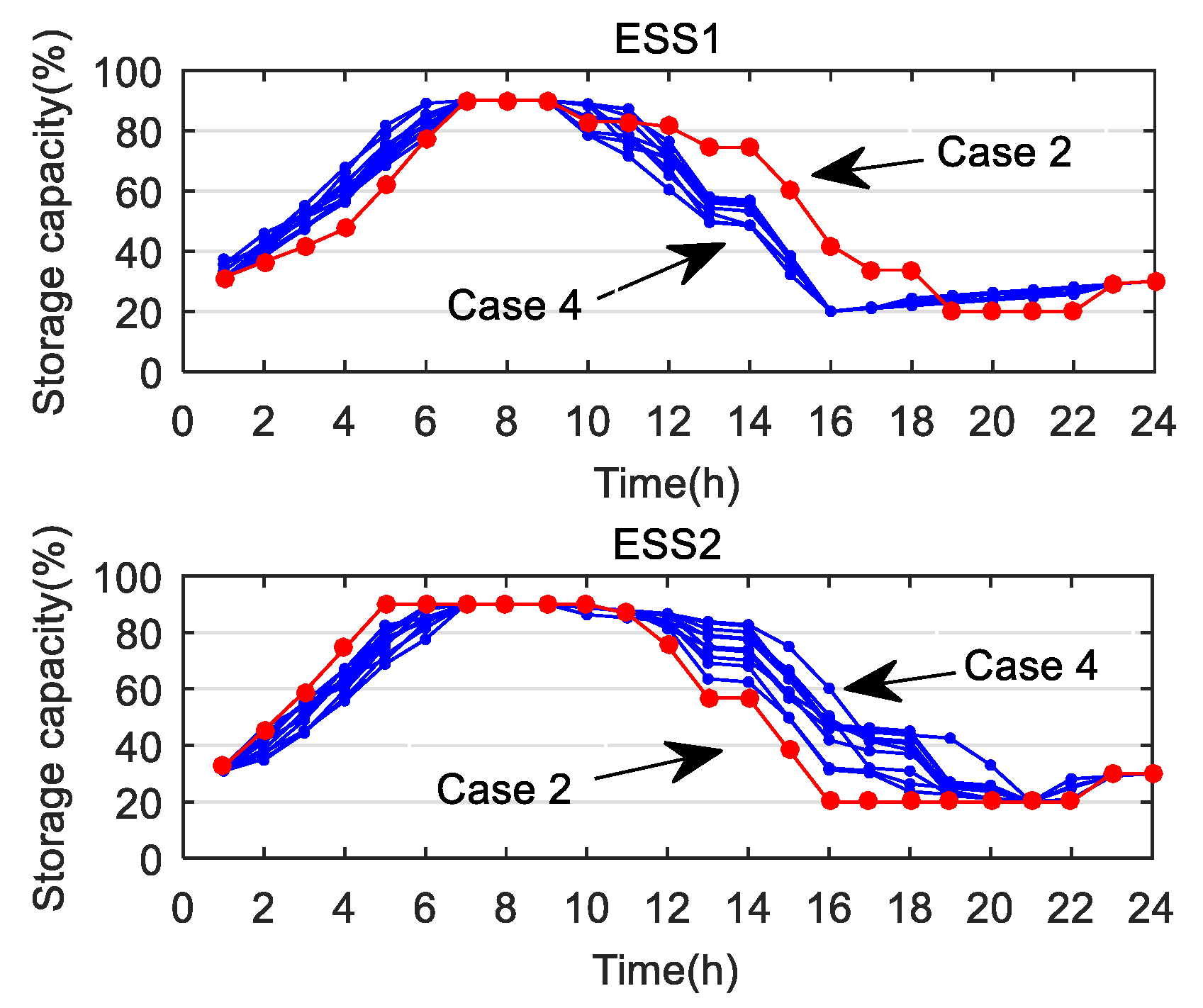
- Case 2:
- Day-ahead scheduling for the hybrid distribution system with CB and ESS considering the wind power prediction curve;
- Case 3:
- Two-stage stochastic scheduling for the hybrid distribution system with CB considering th wind power scenario set; and
- Case 4:
- Two-stage stochastic scheduling for the hybrid distribution system with CB and ESS considering the wind power scenario set.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhao, B.; Zhao, Y.; Wang, Y.; Liu, G.; Song, Q.; Yuan, Z.; Yao, S. Energy internet system based on flexible medium-voltage DC distribution. Proc. CSEE 2015, 35, 4834–4851. [Google Scholar]
- Salomonsson, D.; Sannino, A. Low-voltage DC distribution system for commercial power systems with sensitive electronic loads. IEEE Trans. Power Deliv. 2007, 22, 1620–1627. [Google Scholar] [CrossRef]
- Starke, M.; Li, F.; Tolbert, L.M.; Ozpineci, B. AC vs. DC distribution: Maximum transfer capability. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, 20–24 July 2008; IEEE: Pittsburgh, PA, USA, 2008. [Google Scholar]
- Wang, P.; Goel, L.; Liu, X.; Choo, F.H. Harmonizing AC and DC: A hybrid AC/DC future grid solution. IEEE Power Energy Mag. 2013, 11, 76–83. [Google Scholar] [CrossRef]
- Eajal, A.A.; Shaaban, M.F.; Ponnambalam, K.; El-Saadany, E.F. Stochastic centralized dispatch scheme for AC/DC hybrid smart distribution systems. IEEE Trans. Sustain. Energy 2017, 7, 1046–1059. [Google Scholar] [CrossRef]
- Ahmed, H.M.A.; Eltantawy, A.B.; Salama, M.M.A. A generalized approach to the load flow analysis of AC–DC hybrid distribution systems. IEEE Trans. Power Syst. 2018, 33, 2117–2127. [Google Scholar] [CrossRef]
- Chaudhary, S.K.; Guerrero, J.M.; Teodorescu, R. Enhancing the capacity of the AC distribution system using DC interlinks-a step toward future DC grid. IEEE Trans. Smart Grid 2015, 6, 1722–1729. [Google Scholar] [CrossRef]
- Xu, Y.; Dong, Z.; Zhang, R.; Hill, D.J. Multi-timescale coordinated voltage/var control of high renewable-penetrated distribution systems. IEEE Trans. Power Syst. 2017, 32, 4398–4408. [Google Scholar] [CrossRef]
- Zhang, L.; Tang, W.; Liang, J.; Cong, P.; Cai, Y. Coordinated day-ahead reactive power dispatch in distribution network based on real power forecast errors. IEEE Trans. Power Syst. 2015, 31, 2472–2480. [Google Scholar] [CrossRef]
- Zhang, L.; Tang, W.; Liang, J.; Li, G.; Cai, Y.; Yan, T. A medium voltage hybrid AC/DC distribution network and its economic evaluation. In Proceedings of the 12nd IET International Conference on AC and DC Power Transmission, Beijing, China, 28–29 May 2016. [Google Scholar]
- Zhang, L.; Chen, Y.; Shen, C.; Tang, W.; Jun, L. Coordinated voltage regulation of hybrid AC/DC medium voltage distribution networks. J. Mod. Power Syst. Clean Energy 2018, 6, 463–472. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Liang, D.H.; Crossland, A.F.; Taylor, P.C.; Jones, D.; Wade, N.S. Coordination of multiple energy storage units in a low-voltage distribution network. IEEE Trans. Smart Grid 2015, 6, 2906–2918. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Yao, L.; Hui, D. Optimal control and management of a large-scale battery energy storage system to mitigate fluctuation and intermittence of renewable generations. J. Mod. Power Syst. Clean Energy 2016, 4, 593–603. [Google Scholar] [CrossRef] [Green Version]
- Mahdavi, S.; Hemmati, R.; Jirdehi, M.A.; Department of Electrical Engineering, Kermanshah University of Technology. Two-level planning for coordination of energy storage systems and wind-solar-diesel units in active distribution networks. Energy 2018, 151, 954–965. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhao, J.; Song, Y.; Luo, F.; Meng, K.; Qiu, J.; Hill, D.J. Optimal operation of battery energy storage system considering distribution system uncertainty. IEEE Trans. Sustain. Energy 2018, 9, 1051–1060. [Google Scholar] [CrossRef]
- Kazari, H.; Oraee, H.; Pal, B.C. Assessing the Effect of Wind Farm Layout on Energy Storage Requirement for Power Fluctuation Mitigation. IEEE Trans. Sustain. Energy 2019, 10, 558–568. [Google Scholar] [CrossRef]
- Li, Y.; Wang, J.; Gu, C.; Liu, J.; Li, Z. Investment optimization of grid-scale energy storage for supporting different wind power utilization levels. J. Mod. Power Syst. Clean Energy 2019, 7, 1721–1734. [Google Scholar] [CrossRef] [Green Version]
- Tomczewski, A.; Kasprzyk, L. Optimisation of the structure of a wind farm—Kinetic energy storage for improving the reliability of electricity supplies. Appl. Sci. 2018, 8, 1439. [Google Scholar] [CrossRef] [Green Version]
- Baran, M.E.; Wu, F.F. Network reconfiguration in distribution systems for loss reduction and load balancing. IEEE Trans. Power Deliv. 1989, 4, 1401–1407. [Google Scholar] [CrossRef]
- Wang, S.; Chen, S.; Xie, S. Security-constrained coordinated economic dispatch of energy storage systems and converter stations for AC/DC distribution networks. Autom. Electr. Power Syst. 2017, 41, 85–91. [Google Scholar]
- Ma, X.; Guo, R.; Wang, L.; Huang, J.; Liu, J.; Fang, C. Day-ahead scheduling model for AC/DC active distribution network based on second-order cone programming. Autom. Electr. Power Syst. 2018, 42, 144–150. [Google Scholar]
- Farivar, M.; Low, S.H. Branch flow model: Relaxations and convexification—Part I. IEEE Trans. Power Syst. 2013, 28, 2554–2564. [Google Scholar] [CrossRef]
- Low, S.H. Convex relaxation of optimal power flow, Part II: Exactness. IEEE Trans. Control. Netw. 2014, 1, 177–189. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Liu, K.; Liao, X.; Qin, L.; An, X. Stochastic dynamic economic emission dispatch with unit commitment problem considering wind power integration. Int. Trans. Electr. Energy 2017, 28, e2472. [Google Scholar] [CrossRef]
- Mckay, M.D.; Beckman, R.J.; Conover, W.J. A comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics 1979, 21, 239–245. [Google Scholar]
- Harbrecht, H.; Peters, M.; Schneider, R. On the low-rank approximation by the pivoted Cholesky decomposition. Appl. Numer. Math. 2012, 62, 428–440. [Google Scholar] [CrossRef] [Green Version]
- Wu, L.; Shahidehpour, M.; Li, T. Stochastic security-constrained unit commitment. IEEE Trans. Power Syst. 2007, 22, 800–811. [Google Scholar] [CrossRef]
- Gao, H.; Wang, L.; Liu, J.; Wei, Z. Integrated day-ahead scheduling considering active management in future smart distribution system. IEEE Trans. Power Syst. 2018, 33, 6049–6061. [Google Scholar] [CrossRef]
- Wang, J.; Xu, J.; Liao, S.; Sima, L.; Sun, Y.; Wei, C. Coordinated optimization of integrated electricity-gas energy system considering uncertainty of renewable energy output. Autom. Electr. Power Syst. 2019, 43, 2–9. [Google Scholar]
- Zhang, Y.; Le, J.; Zheng, F.; Liu, K. Two-stage distributionally robust coordinated scheduling for gas-electricity integrated energy system considering wind power uncertainty and reserve capacity configuration. Renew. Energy 2019, 135, 122–135. [Google Scholar] [CrossRef]
- Lofberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the 2004 IEEE International Symposium on Computer Aided Control Systems Design, Taipei, China, 2–4 September 2004; pp. 284–289. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bus Node | /kVar | ||
|---|---|---|---|
| 2 | 60 | 5 | 3 |
| Bus Node | /kW | /(kWh) | /% | ηch | ηdis | |
|---|---|---|---|---|---|---|
| 14, 28 | 300 | 1800 | 30 | 0.9381 | 1.1066 | 3 |
| Bus Node | /kVar | /kVA | μ |
|---|---|---|---|
| 7, 21, 30 | 600 | 1500 | 0.866 |
| Bus Node | /kW | /kW | /kW |
|---|---|---|---|
| 6, 23 | 30 | 300 | 150 |
| Parameters | cG | cL | cW | cLoss | cRamp |
|---|---|---|---|---|---|
| values/($/kWh) | 0.042 | 1 | 0.2 | 0.032 | 0.04 |
| Case | Power Purchasing Cost ($) | Power Fluctuation Penalty Cost ($) | Power Loss (kW) | Load Shedding(kW) |
|---|---|---|---|---|
| Case 1 | 2463.86 | 178.81 | 186.47 | 0 |
| Case 2 | 2343.83 | 57.95 | 181.62 | 0 |
| Case 3 | 2487.71 | 240.71 | 225.78 | 0 |
| Case 4 | 2427.25 | 75.05 | 203.12 | 0 |
| Case | Power Purchasing Cost ($) | Power Fluctuation Penalty Cost ($) | Power Loss (kW) | Load Shedding(kW) |
|---|---|---|---|---|
| Case 1 | 3230.61 | 178.56 | 273.38 | 62.23 |
| Case 2 | 3118.27 | 52.73 | 268.27 | 0 |
| Case 3 | 3249.85 | 235.76 | 319.21 | 110.34 |
| Case 4 | 3134.96 | 80.01 | 276.65 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, P.; Guo, W.; Huang, W.; Qiu, Z.; Yu, M.; Zheng, F.; Zhang, Y. Two-Stage Stochastic Programming Scheduling Model for Hybrid AC/DC Distribution Network Considering Converters and Energy Storage System. Appl. Sci. 2020, 10, 181. https://doi.org/10.3390/app10010181
Kang P, Guo W, Huang W, Qiu Z, Yu M, Zheng F, Zhang Y. Two-Stage Stochastic Programming Scheduling Model for Hybrid AC/DC Distribution Network Considering Converters and Energy Storage System. Applied Sciences. 2020; 10(1):181. https://doi.org/10.3390/app10010181
Chicago/Turabian StyleKang, Peng, Wei Guo, Weigang Huang, Zejing Qiu, Meng Yu, Feng Zheng, and Yachao Zhang. 2020. "Two-Stage Stochastic Programming Scheduling Model for Hybrid AC/DC Distribution Network Considering Converters and Energy Storage System" Applied Sciences 10, no. 1: 181. https://doi.org/10.3390/app10010181