Routing Protocols for UAV-Aided Wireless Sensor Networks



Abstract
:1. Introduction
1.1. Contribution of the Study
- A comprehensive and comparative review of the routing protocols for UAWSNs is provided. To the best of the authors’ knowledge, this is the first attempt at providing a comparative study of the emerging area.
- The existing routing protocols for UAWSNs are systematically classified on the basis of the underlying routing mechanism. In this paper, the 21 existing routing protocols in UAWSNs are categorized and extensively reviewed in terms of protocol characteristics and operational principles.
- The routing protocols are qualitatively compared in terms of routing metrics and policies, various features, and performance factors. This tabular qualitative comparison may help engineers and researchers to select the most suitable protocol based on their needs. Furthermore, all the existing protocols are critically investigated with regard to their advantages and disadvantages. In addition, performance metrics, optimization criteria, and application areas are comparatively discussed.
- Finally, important open research issues and challenges are summarized and discussed, which will be helpful in designing and implementing a new routing protocol.
1.2. Outline of the Paper
2. Communication Technologies for UAWSNs
UAV Deployment in Fifth-Generation (5G) Technology
3. Taxonomy
4. Routing Protocols for UAWSNs
4.1. Network Structure-Based Routing
4.1.1. Flat Routing
4.1.2. Hierarchical Routing
Linear Sensor Routing
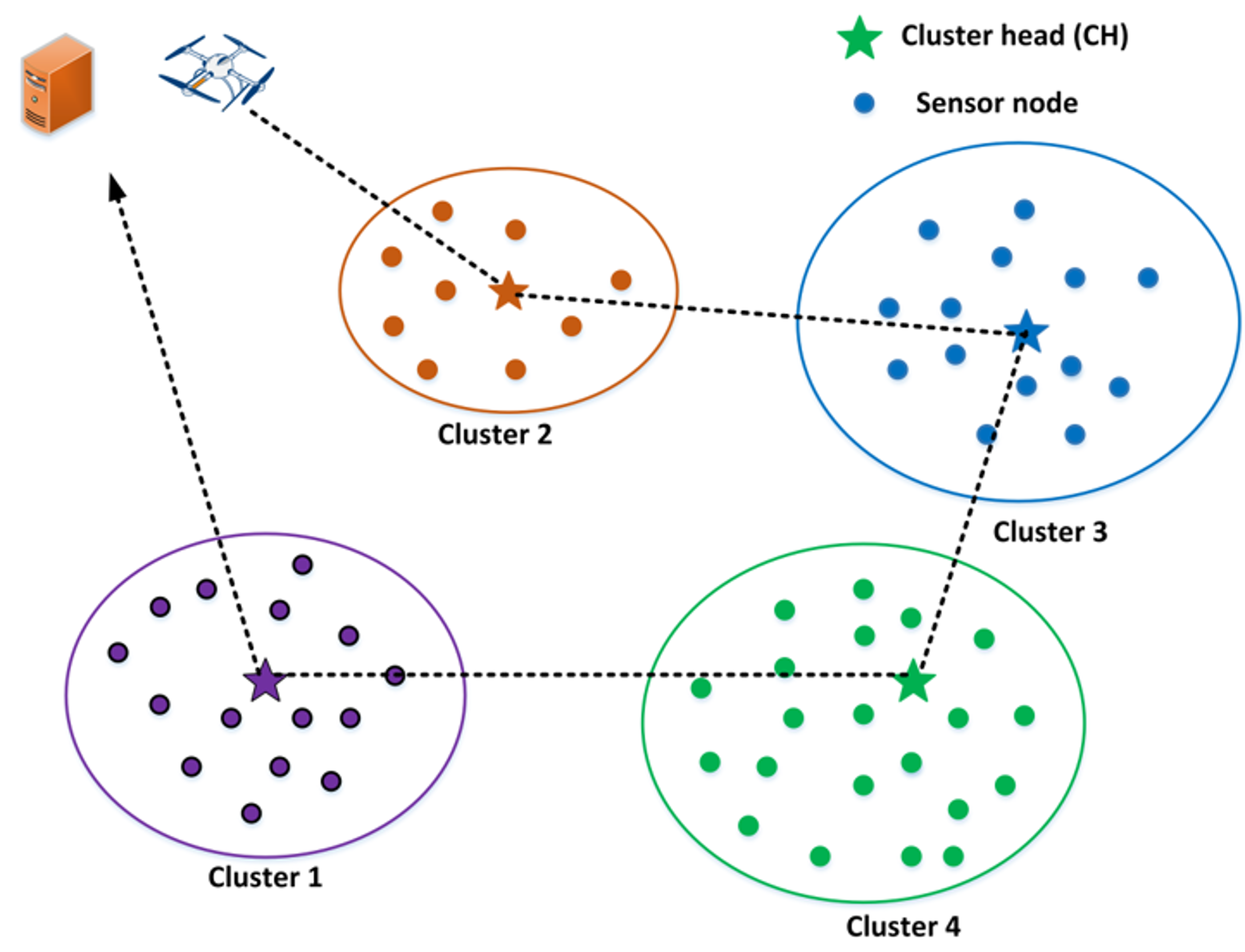
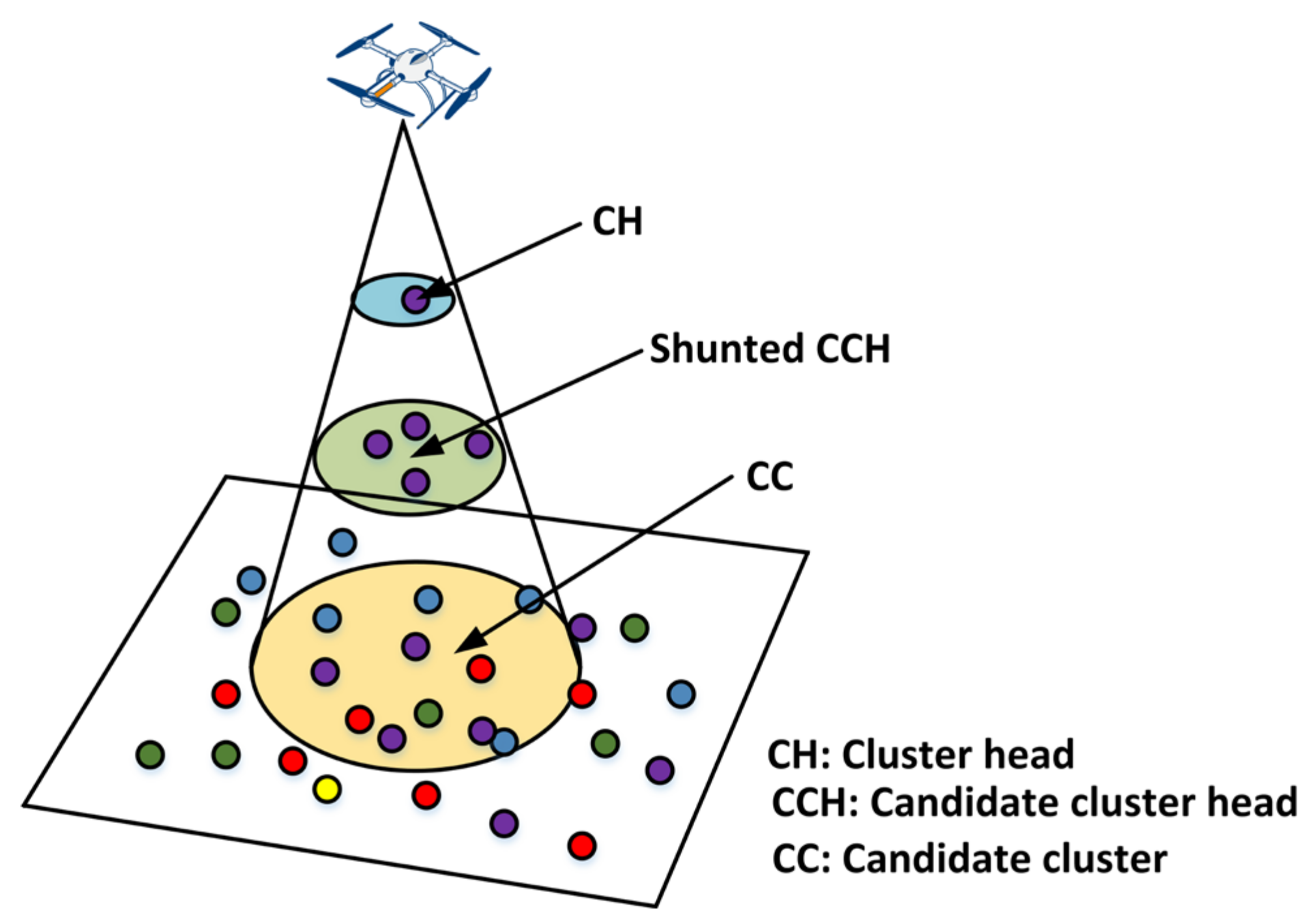
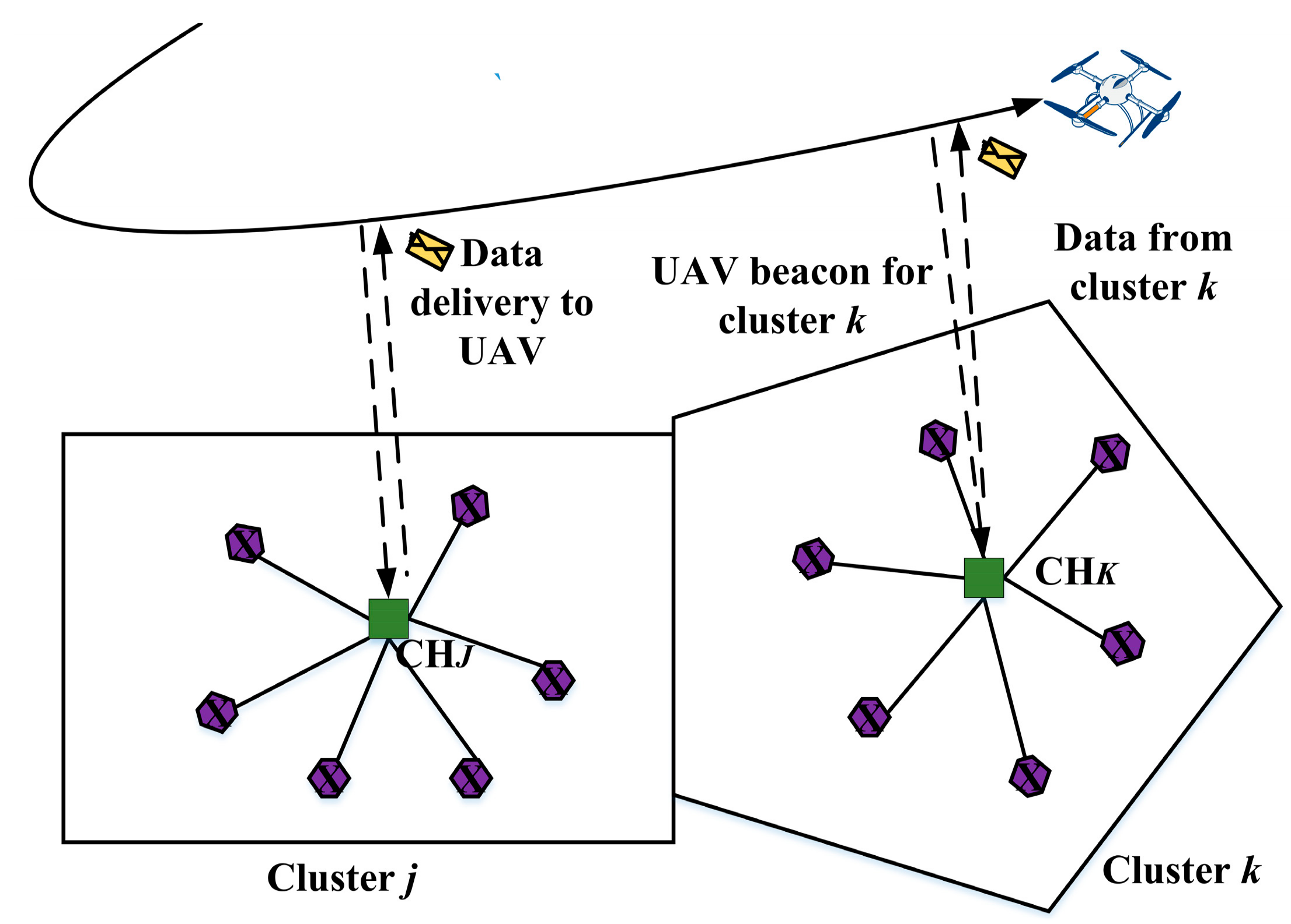
Cluster-Based Routing
Tree-Based Routing
4.1.3. Location-Based Routing
4.2. Protocol Operation-Based Routing
4.2.1. Swarm Intelligence Routing
4.2.2. Multi-Path Routing
4.2.3. Shortest-Path Routing
5. Comparison of Routing Protocols
6. Open Research Issues and Challenges
6.1. UAV Path Planning
6.2. Sensor-to-UAV Data Transfer
6.3. UAV Coverage
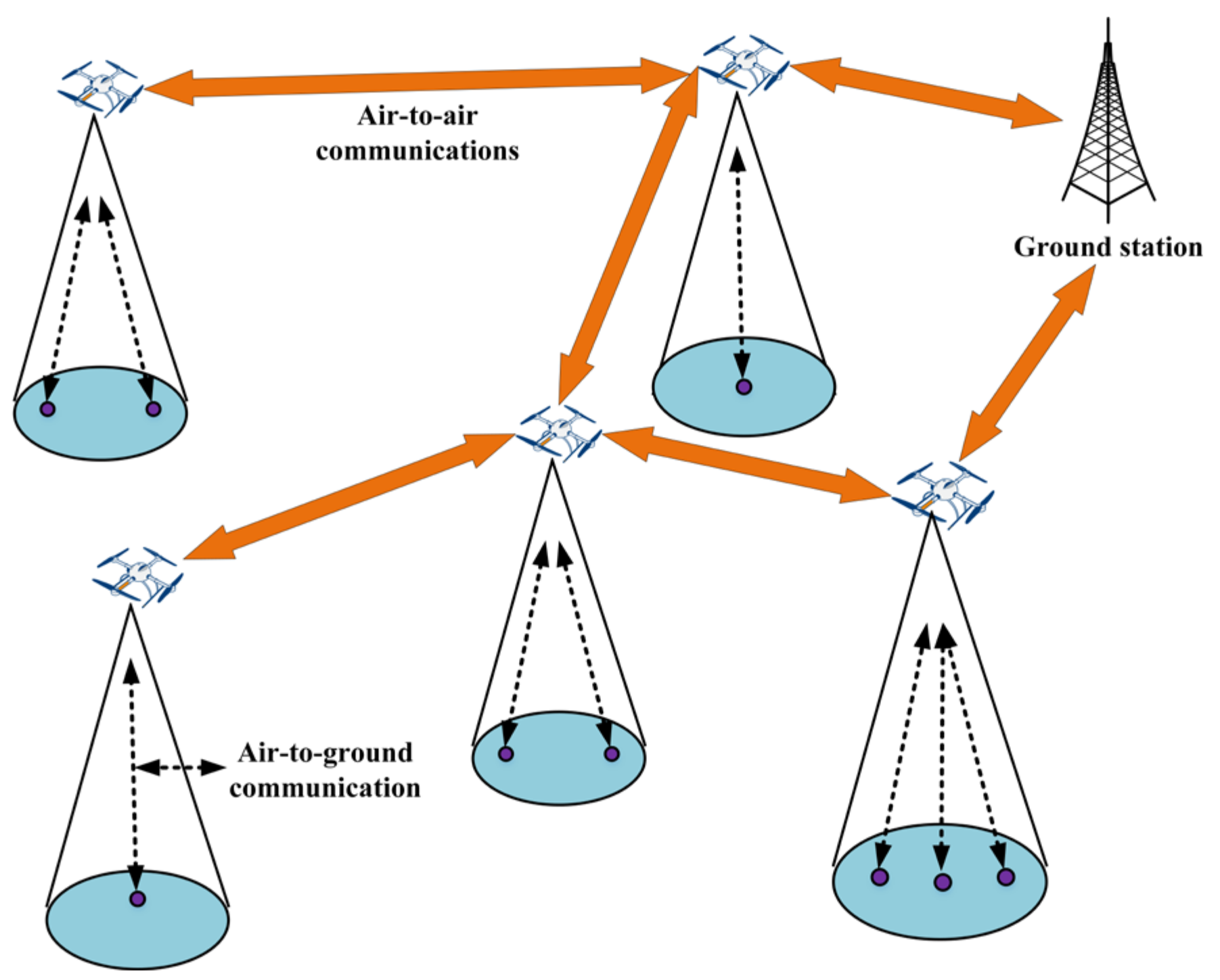
6.4. Multi-UAV-Aided WSNs
6.5. Mobility
6.6. UAV Positioning
6.7. Security
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Arafat, M.Y.; Moh, S. A Survey on Cluster-Based routing protocols for unmanned aerial vehicle networks. IEEE Access 2019, 7, 498–516. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Routing protocols for unmanned aerial vehicle networks: A survey. IEEE Access 2019, 7, 99694–99720. [Google Scholar] [CrossRef]
- Cho, A.; Kim, J.; Lee, S.; Kee, C. Wind estimation and airspeed calibration using a UAV with a Single-Antenna GPS receiver and pitot tube. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 109–117. [Google Scholar] [CrossRef]
- Semsch, E.; Jakob, M.; Pavlicek, D.; Pěchouček, M. Autonomous UAV surveillance in complex urban environments. In Proceedings of the 2009 IEEE/WIC/ACM International Joint Conference on Web Intelligence and Intelligent Agent Technology, Galveston, TX, USA, 15–18 September 2009; Volume 2, pp. 82–85. [Google Scholar]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Lagraa, N.; Yagoubi, M.B. Intelligent UAV-Assisted routing protocol for urban VANETs. Comput. Commun. 2017, 107, 93–111. [Google Scholar] [CrossRef]
- Barrado, C.; Meseguer-Pallarés, R.; Lopez, J.; Pastor, E.; Santamaria, E.; Royo, P. Wildfire monitoring using a mixed Air-Ground mobile network. IEEE Pervasive Comput. 2010, 9, 24–32. [Google Scholar] [CrossRef]
- Xiang, H.; Tian, L. Development of a Low-Cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosyst. Eng. 2011, 108, 174–190. [Google Scholar] [CrossRef]
- Lottes, P.; Khanna, R.; Pfeifer, J.; Siegwart, R.; Stachniss, C. UAV-Based crop and weed classification for smart farming. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29–3 June 2017; pp. 3024–3031. [Google Scholar]
- Arafat, M.Y.; Moh, S. Location-Aided delay tolerant routing protocol in UAV networks for Post-Disaster operation. IEEE Access 2018, 6, 59891–59906. [Google Scholar] [CrossRef]
- Sánchez-García, J.; Reina, D.G.; Toral, S. A distributed PSO-Based exploration algorithm for a UAV network assisting a disaster scenario. Future Gener. Comput. Syst. 2019, 90, 129–148. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef] [Green Version]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on unmanned aerial vehicle networks for civil applications: A communications viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Abdulla, A.; Fadlullah, Z.; Nishiyama, H.; Kato, N.; Ono, F.; Miura, R. An optimal data collection technique for improved utility in UAS-Aided networks. In Proceedings of the IEEE INFOCOM 2014–IEEE Conference on Computer Communications, Berlin, Germany, 27 April–2 May 2014; pp. 736–744. [Google Scholar]
- De Freitas, E.P.; Heimfarth, T.; Netto, I.F.; Lino, C.E.; Pereira, C.E.; Ferreira, A.M.; Wagner, F.; Larsson, T. UAV relay network to support WSN connectivity. Int. Congr. Ultra Mod. Telecommun. Control Syst. 2010, 309–314. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Localization and clustering based on swarm intelligence in UAV networks for emergency communications. IEEE Internet Things J. 2019, 6, 8958–8976. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Throughput maximization for UAV-Enabled mobile relaying systems. IEEE Trans. Commun. 2016, 64, 4983–4996. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for Multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef] [Green Version]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Agrawal, D.P.; Zhang, S. Communication and networking of UAV-Based systems: Classification and associated architectures. J. Netw. Comput. Appl. 2017, 84, 93–108. [Google Scholar] [CrossRef]
- Pitre, R.R.; Li, X.R.; DelBalzo, R. UAV route planning for joint search and track missions? An information-value approach. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2551–2565. [Google Scholar] [CrossRef]
- Chen, C.-J.; Chen, J.-A.; Huang, Y.-M. Intelligent environmental sensing with an unmanned aerial system in a wireless sensor network. Int. J. Smart Sens. Intell. Syst. 2017, 10, 696–717. [Google Scholar] [CrossRef] [Green Version]
- Trasviña-Moreno, C.; Blasco, R.; Marco, Á.; Casas, R.; Trasviña-Castro, A. Unmanned aerial vehicle based wireless sensor network for Marine-Coastal environment monitoring. Sensors 2017, 17, 460. [Google Scholar] [CrossRef]
- Militaru, G.; Popescu, D.; Ichim, L. UAV-to-UAV communication options for civilian applications. In Proceedings of the 26th Telecommunications Forum (TELFOR), Belgrade, Serbia, 20–21 November 2018. [Google Scholar] [CrossRef]
- Fadlullah, Z.M.; Takaishi, D.; Nishiyama, H.; Kato, N.; Miura, R. A dynamic trajectory control algorithm for improving the communication throughput and delay in UAV-Aided networks. IEEE Netw. 2016, 30, 100–105. [Google Scholar] [CrossRef]
- Frew, E.W.; Brown, T.X. Airborne communication networks for small unmanned aircraft systems. Proc. IEEE 2008, 96, 2008–2027. [Google Scholar] [CrossRef]
- Frew, E.W.; Brown, T.X. Networking issues for small unmanned aircraft systems. J. Intell. Robot. Syst. 2009, 54, 21–37. [Google Scholar] [CrossRef]
- Ho, D.; Shimamoto, S. Highly reliable communication protocol for WSN-UAV system employing TDMA and PFS scheme. In Proceedings of the 2011 IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011. [Google Scholar] [CrossRef]
- Hua, M.; Wang, Y.; Zhang, Z.; Li, C.; Huang, Y.; Yang, L. Power-Efficient communication in UAV-Aided wireless sensor networks. IEEE Commun. Lett. 2018, 22, 1264–1267. [Google Scholar] [CrossRef]
- Ali, Z.A.; Masroor, S.; Aamir, M. UAV based data gathering in wireless sensor networks. Wirel. Pers. Commun. 2018, 106, 1801–1811. [Google Scholar] [CrossRef]
- Huiru, C.; Weihong, H.; Xuanjiao, L.; Yeqian, L.; Guo, L. Design and experiment of a WSN sink platform based on fixed wing unmanned aerial vehicles. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016; pp. 1271–1274. [Google Scholar]
- Naqvi, S.; Hassan, S.; Pervaiz, H.; Ni, Q. Drone-Aided communication as a key enabler for 5G and resilient public safety networks. IEEE Commun. Mag. 2018, 56, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2018, 6, 2241–2263. [Google Scholar] [CrossRef] [Green Version]
- Karkazis, P.; Trakadas, P.; Leligou, H.C.; Sarakis, L.; Papaefstathiou, I.; Zahariadis, T. Evaluating routing metric composition approaches for QoS differentiation in low power and lossy networks. Wirel. Netw. 2012, 19, 1269–1284. [Google Scholar] [CrossRef]
- Zahariadis, T.; Trakadas, P. Design guidelines for routing metrics composition in LLN. draft-zahariadis-roll-metrics-composition-04 (work in progress), 23 November 2012. Available online: https://tools.ietf.org/html/draft-zahariadis-roll-metrics-composition-04 (accessed on 27 May 2019).
- Mazayev, A.; Correia, N.; Schütz, G. Data gathering in wireless sensor networks using unmanned aerial vehicles. Int. J. Wirel. Inf. Netw. 2016, 23, 297–309. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-Efficient data collection in UAV enabled wireless sensor network. IEEE Wirel. Commun. Lett. 2017, 7, 328–331. [Google Scholar] [CrossRef] [Green Version]
- Laouira, M.L.; Abdelli, A.; Ben Othman, J.; Kim, H. An efficient WSN based solution for border surveillance. IEEE Trans. Sustain. Comput. 2019, 1. [Google Scholar] [CrossRef] [Green Version]
- Gomez, J.M.; Wiedemann, T.; Shutin, D. Unmanned aerial vehicles in wireless sensor networks: Automated sensor deployment and mobile sink nodes. Adv. Intell. Syst. Comput. 2018, 15, 943–953. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Zhang, S. A framework for using unmanned aerial vehicles for data collection in linear wireless sensor networks. J. Intell. Robot. Syst. 2013, 74, 437–453. [Google Scholar] [CrossRef]
- Uddin, M.; Mansour, A.; Le Jeune, D.; Ammad-Uddin, M.; Aggoune, E. UAV-Assisted dynamic clustering of wireless sensor networks for crop health monitoring. Sensors 2018, 18, 555. [Google Scholar] [CrossRef] [Green Version]
- de Martinez Dios, J.; Lferd, K.; de San Bernabé, A.; Núñez, G.; Torres-González, A.; Ollero, A. Cooperation between UAS and wireless sensor networks for efficient data collection in large environments. J. Intell. Robot. Syst. 2012. [Google Scholar] [CrossRef]
- Okcu, H.; Soyturk, M. Distributed clustering approach for UAV integrated wireless sensor networks. Int. J. Ad Hoc Ubiquitous Comput. 2014, 15, 106. [Google Scholar] [CrossRef]
- Dong, M.; Ota, K.; Lin, M.; Tang, Z.; Du, S.; Zhu, H. UAV-Assisted data gathering in wireless sensor networks. J. Supercomput. 2014, 70, 1142–1155. [Google Scholar] [CrossRef]
- Zanjie, H.; Hiroki, N.; Nei, K.; Fumie, O.; Ryu, M.; Baohua, Z. Resource allocation for data gathering in UAV-Aided wireless sensor networks. In Proceedings of the 2014 4th IEEE International Conference on Network Infrastructure and Digital Content, Karlskrona, Sweden, 19–21 September 2014; pp. 11–16. [Google Scholar]
- Albu-Salih, A.; Seno, S. Energy-Efficient data gathering Framework-Based clustering via multiple UAVs in Deadline-Based WSN applications. IEEE Access 2018, 6, 72275–72286. [Google Scholar] [CrossRef]
- Ebrahimi, D.; Sharafeddine, S.; Ho, P.-H.; Assi, C. Data Collection in Wireless Sensor Networks Using UAV and Compressive Data Gathering. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, UAE, 9–13 December 2018. [Google Scholar] [CrossRef]
- Caillouet, C.; Giroire, F.; Razafindralambo, T. Efficient data collection and tracking with flying drones. Ad Hoc Netw. 2019, 89, 35–46. [Google Scholar] [CrossRef] [Green Version]
- Popescu, D.; Dragana, C.; Stoican, F.; Ichim, L.; Stamatescu, G. A collaborative UAV-WSN network for monitoring large areas. Sensors 2018, 18, 4202. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Zhou, Q.; Cheng, C.-T. A UAV-Assisted Topology-Aware data aggregation protocol in WSN. Phys. Commun. 2019, 34, 48–57. [Google Scholar] [CrossRef]
- Ebrahimi, D.; Sharafeddine, S.; Ho, P.-H.; Assi, C. UAV-Aided Projection-Based compressive data gathering in wireless sensor networks. IEEE Internet Things J. 2018, 6, 1893–1905. [Google Scholar] [CrossRef]
- Villas, L.A.; Guidoni, D.L.; Maia, G.; Pazzi, R.W.; Ueyama, J.; Loureiro, A. An energy efficient joint localization and synchronization solution for wireless sensor networks using unmanned aerial vehicle. Wirel. Netw. 2014, 21, 485–498. [Google Scholar] [CrossRef]
- Zema, N.R.; Mitton, N.; Ruggeri, G. Using location services to autonomously drive flying mobile sinks in wireless sensor networks. In Ad Hoc Networks; Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering.; Springer: Cham, Switzerland, 2014; Volume 140. [Google Scholar] [CrossRef]
- Ho, D.-T.; Grøtli, E.I.; Sujit, P.B.; Johansen, T.A.; Sousa, J. Optimization of wireless sensor network and uav data acquisition. J. Intell. Robot. Syst. 2015, 78, 159–179. [Google Scholar] [CrossRef]
- Say, S.; Inata, H.; Liu, J.; Shimamoto, S. Priority-Based data gathering framework in UAV-Assisted wireless sensor networks. IEEE Sens. J. 2016, 16, 5785–5794. [Google Scholar] [CrossRef]
- Baek, J.; Han, S.I.; Han, Y. Energy-Efficient UAV routing for wireless sensor networks. IEEE Trans. Veh. Technol. 2020, 69, 1741–1750. [Google Scholar] [CrossRef]
- Sun, P.; Boukerche, A. Performance modeling and analysis of a UAV path planning and target detection in a UAV-Based wireless sensor network. Comput. Netw. 2018, 146, 217–231. [Google Scholar] [CrossRef]
- Poudel, S.; Moh, S. Energy-Efficient and fast MAC protocol in UAV-Aided wireless sensor networks for Time-Critical applications. Sensors 2020, 20, 2635. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Viable path planning for data collection robots in a sensing field with obstacles. Comput. Commun. 2017, 111, 84–96. [Google Scholar] [CrossRef]
- Harounabadi, M.; Mitschele-Thiel, A. Applying message forwarding and replication to Multi-UAV message ferry networks. Mob. Netw. Appl. 2018, 23, 1337–1346. [Google Scholar] [CrossRef]
- Poudel, S.; Moh, S. Medium access control protocols for unmanned aerial Vehicle-Aided wireless sensor networks: A survey. IEEE Access 2019, 7, 65728–65744. [Google Scholar] [CrossRef]
- Nazib, R.A.; Moh, S. Routing protocols for unmanned aerial Vehicle-Aided vehicular Ad Hoc networks: A survey. IEEE Access 2020, 8, 77535–77560. [Google Scholar] [CrossRef]
- Fawaz, W.; Atallah, R.; Assi, C.; Khabbaz, M. Unmanned aerial vehicles as Store-Carry-Forward nodes for vehicular networks. IEEE Access 2017, 5, 23710–23718. [Google Scholar] [CrossRef]
- Mao, J.; Jiang, X.; Zhang, X. Analysis of node deployment in wireless sensor networks in warehouse environment monitoring systems. Eurasip J. Wirel. Commun. Netw. 2019, 2019. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Protocol | Standard | Physical Specification | Mobi- lity | Data Rate | Latency | Radio Range | Link Types |
|---|---|---|---|---|---|---|---|---|
| WPAN | UWB | IEEE 802.15.3 | Unlicensed, 2.4 GHz, TDMA | Yes | 22 Mbps | <25 ns | 100 m | Sensor-to-CH link within short range. |
| Zigbee | IEEE 802.15.4 | Unlicensed, 2.4 GHz, DSSS | Yes | <250 kbps | Channel access 15 ms | 100 m | Sensor-to-CH link within short range. | |
| Zigbee- Pro | IEEE 802.15.4 | Unlicensed, 2.4 GHz, DSSS | Yes | <250 kbps | Channel access 15 ms | Indoor 1600 m Outdoor 2500 m | Sensor-to-CH link within long range. | |
| WLAN | Wi-Fi | IEEE 802.11a | Unlicensed, 5 GHz, OFDM | Yes | 54 Mbps | Slot time: 9 μs, SIFS: 16 μs, DIFS: 34 μs, Propagation delay: 1 μs | 120 m Outdoor | High data rate A2A and U2G |
| IEEE 802.11b | Unlicensed, 2.4 GHz, DSSS | Yes | 11 Mbps | Slot time: 20 μs, SIFS: 10μs, DIFS: 50 μs, Propagation delay: 1 μs | 140 m outdoor | Low to medium data rate A2A and U2G | ||
| IEEE 802.11g | Unlicensed, 2.4 GHz, DSSS, OFDM | Yes | 54 Mbps | DIFS : 50 µs SIFS : 20 µs Slot time: 20 µs | 140 m outdoor | Low to high data rate A2A and U2G | ||
| IEEE 802.11n | Unlicensed, 2.4 GHz and 5 GHz, DSSS, OFDM | Yes | 600 Mbps | Slot time: 9 μs, SIFS: 16 μs, DIFS: 34 μs, Propagation delay: 1 μs | 250 m outdoor | Medium to high data rate A2A and U2G | ||
| IEEE 802.11ac | Unlicensed, 5 GHz, QAM | Yes | 6933 Mbps | DIFS : 34 µs SIFS : 16 µs Slot time: 9 µs | 120 m outdoor | High data rate A2A and U2G |
| Protocol | Routing Policies and Metrics |
|---|---|
| HHA | Optimized link routing |
| SN-UAV | Optimized link routing + shortest path routing |
| UAV-WSN | Traffic allocation-based data driven |
| UAV-AS-MS | Optimal link state routing |
| ULSN | Liner sensor cluster routing + traffic allocation-based routing |
| URP | Dynamic cluster-based routing + node estimating and data-driven routing |
| C-UAV-WSN | Distributed cluster-based routing + freshest path routing |
| rHEED | Dynamic and distributed cluster routing + dynamic path routing |
| UADG | Data-driven routing + minimum-cost path routing |
| DPBA | Traffic allocation-based routing |
| EEDGF | Short distance-based routing |
| PCDG | Optimized and shortest path routing |
| ADCP | Dijkstra shortest-path routing |
| H-UAV-WSN | Deterministic clustering mechanism |
| TADA | Topology-aware multi-path routing |
| UAV-CDG | Projection-based CDG data collection + shortest UAV trajectory |
| EEJLS-WSN-UAV | Distance-estimation routing + position computation-based routing |
| LS-UAV-WSN | Shortest-path routing + data-driven routing |
| PSO-WSN-UAV | Optimized link routing + shortest path-based routing |
| FSRP | Shortest-path routing + optimized link routing |
| EFUR-WSN | Shortest UAV route with modified Voronoi diagram and optimal UAV hovering locations. |
| Protocol | Advantages | Limitations |
|---|---|---|
| HHA | Ensures an efficient set of paths to gather data and deliver to the sink. | The number of hops may increase delay. |
| SN-UAV | Sensor node wake-up schedule and UAV trajectory are jointly optimized. | Considers single-UAV scenario, where UAV-sensor allocation and channel interference are not considered. |
| UAV-WSN | Multi-layer approach makes equipment collaborate to provide an efficient solution. | Security issues such as network jamming are major concerns and node failure is not studied. |
| UAV-AS-MS | Rapid deployment and optimal routing are obtained by solving vehicle routing problem. | Only low-density WSNs are considered. |
| ULSN | Reduces communication interference for a linear deployed sensor network. | Only messaging is considered for communication between WSN and UAV. |
| URP | Dynamic clustering approach with dynamic path of UAV | Considers single-UAV and single-hop communication. |
| C-UAV-WSN | UAV flight path is updated on the basis of new cluster head (CH) location. | Single-hop cluster may increase the number of clusters in the network. |
| rHEED | Optimizes UAV path and altitude to reduce the number of uncovered nodes. | For a large number of nodes, the single UAV approach is not realistic. |
| UADG | Approach is suitable for any density of the network. | For utilizing multiple mobile agents, parallel processing is not considered. |
| DPBA | Joint consideration of bandwidth allocation and energy allocation increases the transmission rate. | Single UAV-based resource optimization may decrease network performance. |
| EEDGF | Minimizes the travel time by providing optimal position and path of UAV. | Communication interference is not considered for multi-UAV deployment. |
| PCDG | Compressive data gathering approach reduces the number of transmissions, which reduces the energy consumption. | Compressive data gathering is effective only for a large-scale network. |
| ADCP | A heuristic pricing scheme solves the three-dimensional (3D) positions of the targets while accounting for mobility and connectivity variations. | UAV path planning is not considered. |
| H-UAV-WSN | Obstacle avoidance is considered in sensor clustering as well as UAV routing. | UAV data collection depends on CH location, and CH node failure may drop the data transmission. |
| TADA | Achieves topology-aware data aggregation. | Link transmission failure is not considered. |
| UAV-CDG | Allows a lower number of transmissions. | Suitable for large scale network. |
| EEJLS-WSN-UAV | UAV is used for joint optimization of node localization and time synchronization. | A large number of beacon nodes significantly increase the cost of the network. |
| LS-UAV-WSN | Increases the network coverage. | UAV path and altitude are not taken into consideration, which may have effect on sensing. |
| PSO-WSN-UAV | Topology optimize reduces transmission error and energy consumption. | Wind speed may have an effect on UAV traveling time. |
| FSRP | Increases the data collection reliability. | Single-UAV network and transmission interference may occur. |
| EFUR-WSN | UAV route can reduce energy consumption of data transmission. | 50 m of UAV altitude may not be applicable in real life scenarios due to obstacles and may have higher line of sight (LoS). |
| Protocol | Topology | Mobility Pattern | Location Awareness | Data Transmission | Scalability | Fault Tolerance |
|---|---|---|---|---|---|---|
| HHA | Flat | Random | Yes | Multi-hop | Low | No |
| SN-UAV | Flat | Optimized | Yes | Single-hop | Moderate | No |
| UAV-WSN | Flat | Predefine | Yes | Single-hop | Low | No |
| UAV-AS-MS | Flat | Reference point | Yes | Single-hop | Moderate | No |
| ULSN | LSN | Pre-defined | Yes | Multi-hop | Moderate | Yes |
| URP | Cluster-based | Controlled | Yes | Single-hop | Low | No |
| C-UAV-WSN | Cluster-based | Pre-defined | Yes | Single-hop | Moderate | No |
| rHEED | Cluster-based | Controlled | No | Multi-hop | High | No |
| UADG | Cluster-based | Random | No | Multi-hop | Low | No |
| DPBA | Cluster-based | Controlled | No | Single-hop | Low | No |
| EEDGF | Cluster-based | Random | Yes | Single-hop | Moderate | No |
| PCDG | Cluster-based | Random | No | Multi-hop | Moderate | No |
| ADCP | Tree-based | Random | Yes | Multi-hop | High | No |
| H-UAV-WSN | Tree-based | Pre-defined | Yes | Multi-hop | High | No |
| TADA | Tree-based | Random | No | Single-hop | High | No |
| UAV-CDG | Tree-based | Reference point | No | CDG | High | Yes |
| EEJLS-WSN-UAV | Position | Random | Yes | Multi-hop | High | No |
| LS-UAV-WSN | Cluster-based | Direct | Yes | Multi-hop | Moderate | No |
| PSO-WSN-UAV | Cluster-based | Optimized | Yes | Multi-hop | High | Yes |
| FSRP | Cluster-based | Controlled | Yes | Multi-hop | High | Yes |
| EFUR-WSN | Cluster-based | Reference point | No | Multi-hop | High | No |
| Protocol | Comm. Reliability | End-to-End Delay | Load Balancing | Energy Efficiency | Multi-Path | No. of UAVs |
| HHA | Low | Moderate | No | Moderate | No | Multiple |
| SN-UAV | Moderate | Low | No | High | No | Single |
| UAV-WSN | Moderate | Moderate | No | Moderate | No | Multiple |
| UAV-AS-MS | High | Low | Yes | High | No | Multiple |
| ULSN | High | Low | No | High | No | Multiple |
| URP | Moderate | Moderate | No | Moderate | No | Single |
| C-UAV-WSN | Low | Low | No | High | No | Single |
| rHEED | High | Low | Yes | High | No | Single |
| UADG | Low | Moderate | No | Low | No | Single |
| DPBA | Low | Moderate | No | Moderate | No | Multiple |
| EEDGF | Moderate | Low | No | High | No | Multiple |
| PCDG | Moderate | Moderate | No | High | Yes | Single |
| ADCP | High | Low | No | Low | Yes | Multiple |
| H-UAV-WSN | High | Moderate | No | Low | No | Multiple |
| TADA | High | Moderate | Yes | High | Yes | Single |
| UAV-CDG | High | Low | Yes | High | No | Single |
| EEJLS-WSN-UAV | High | Low | No | High | Yes | Multiple |
| LS-UAV-WSN | Moderate | Low | No | High | No | Single |
| PSO-WSN-UAV | High | Low | No | High | Yes | Multiple |
| FSRP | High | Low | Yes | High | Yes | Single |
| EFUR-WSN | High | Low | No | High | Yes | Single |
| Protocol | Evaluated Performance Metrics | Performance Optimization | Application Domain |
|---|---|---|---|
| HHA | Path length, number of UAVs | Path optimization | Environment monitoring |
| SN-UAV | Energy consumption | Optimize network lifetime | Environment monitoring |
| UAV-WSN | Energy consumption, response time, and load balancing | Optimize network lifetime | Border surveillance |
| UAV-AS-MS | Energy consumption | Optimization of transmission power | Emergency situation |
| ULSN | Packet delivery ratio, energy consumption, delay, and buffer size | Optimize data transmission | Sea surface pipeline monitoring |
| URP | Deployment time, energy efficiency, and throughput. | Reduce the energy consumption in data collection | Crop health monitoring |
| C-UAV-WSN | Packet delivery ratio, energy consumption, and coverage. | Maximize area coverage | Sparse WSNs |
| rHEED | Energy consumption and coverage | Optimize the area coverage | Disaster monitoring |
| UADG | Energy consumption | Optimize data collection and processing | Post-disaster operation |
| DPBA | Packet delivery ratio, energy consumption | Optimize the resource allocation | Data driven |
| EEDGF | UAV travel distance and travel time | Minimize UAV flight time | Deadline-based WSN |
| PCDG | Total number of transmissions and UAV travel distance | Optimize UAV path and data transmission | Large-scale WSN |
| ADCP | Data collection cost | Coverage and data collection | Wildlife application |
| H-UAV-WSN | Position accuracy | Path optimization | Wide area monitoring |
| TADA | Energy consumption | Optimize data transmission | Large-scale WSNs |
| UAV-CDG | Total number of transmissions | Optimize data transmission | WSN |
| EEJLS-WSN-UAV | Localization error, energy consumption, and time synchronization | Node location optimization | Distributed WSN |
| LS-UAV-WSN | Packet delivery ratio and delay | Network coverage | Distributed WSN |
| PSO-WSN-UAV | UAV travel time and energy consumption. | Find the optimal topology | Surveillance |
| FSRP | Packer delivery ratio, delay, energy consumption, and the number of alive nodes | Maximum data collection | WSN |
| EFUR-WSN | UAV traveling distance and convergence of algorithm | Optimization of energy consumption and data transmission | WSN |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arafat, M.Y.; Habib, M.A.; Moh, S. Routing Protocols for UAV-Aided Wireless Sensor Networks. Appl. Sci. 2020, 10, 4077. https://doi.org/10.3390/app10124077
Arafat MY, Habib MA, Moh S. Routing Protocols for UAV-Aided Wireless Sensor Networks. Applied Sciences. 2020; 10(12):4077. https://doi.org/10.3390/app10124077
Chicago/Turabian StyleArafat, Muhammad Yeasir, Md Arafat Habib, and Sangman Moh. 2020. "Routing Protocols for UAV-Aided Wireless Sensor Networks" Applied Sciences 10, no. 12: 4077. https://doi.org/10.3390/app10124077
APA StyleArafat, M. Y., Habib, M. A., & Moh, S. (2020). Routing Protocols for UAV-Aided Wireless Sensor Networks. Applied Sciences, 10(12), 4077. https://doi.org/10.3390/app10124077