Autonomous Dynamic Adaptability System to Maintain Irradiance Levels in a Steady-State Solar Simulator



Abstract
:1. Introduction
2. Materials and Methods
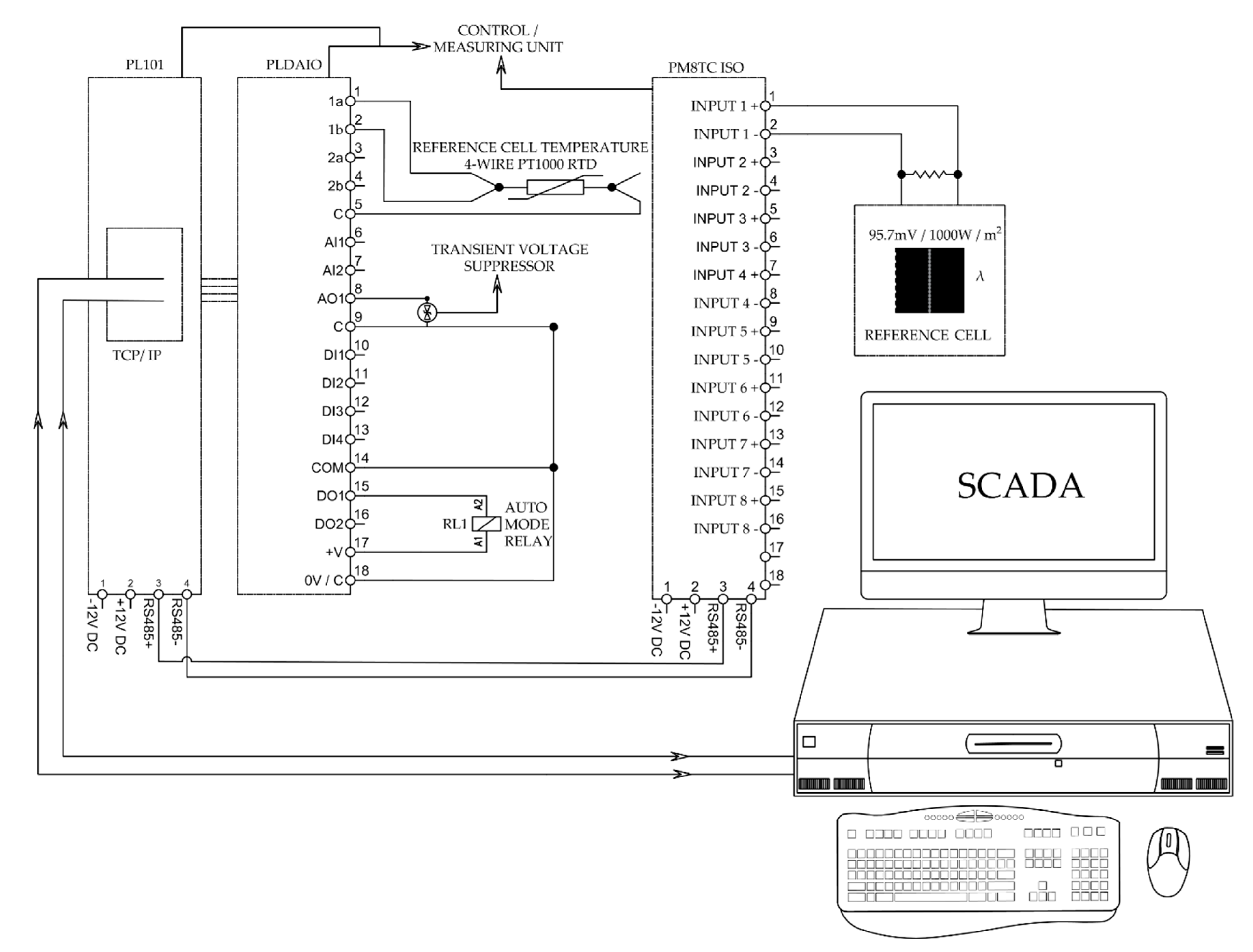
2.1. System Architecture
2.2. Hardware Description
2.2.1. Metal Oxide Varistor
2.2.2. Miniature Circuit Breaker
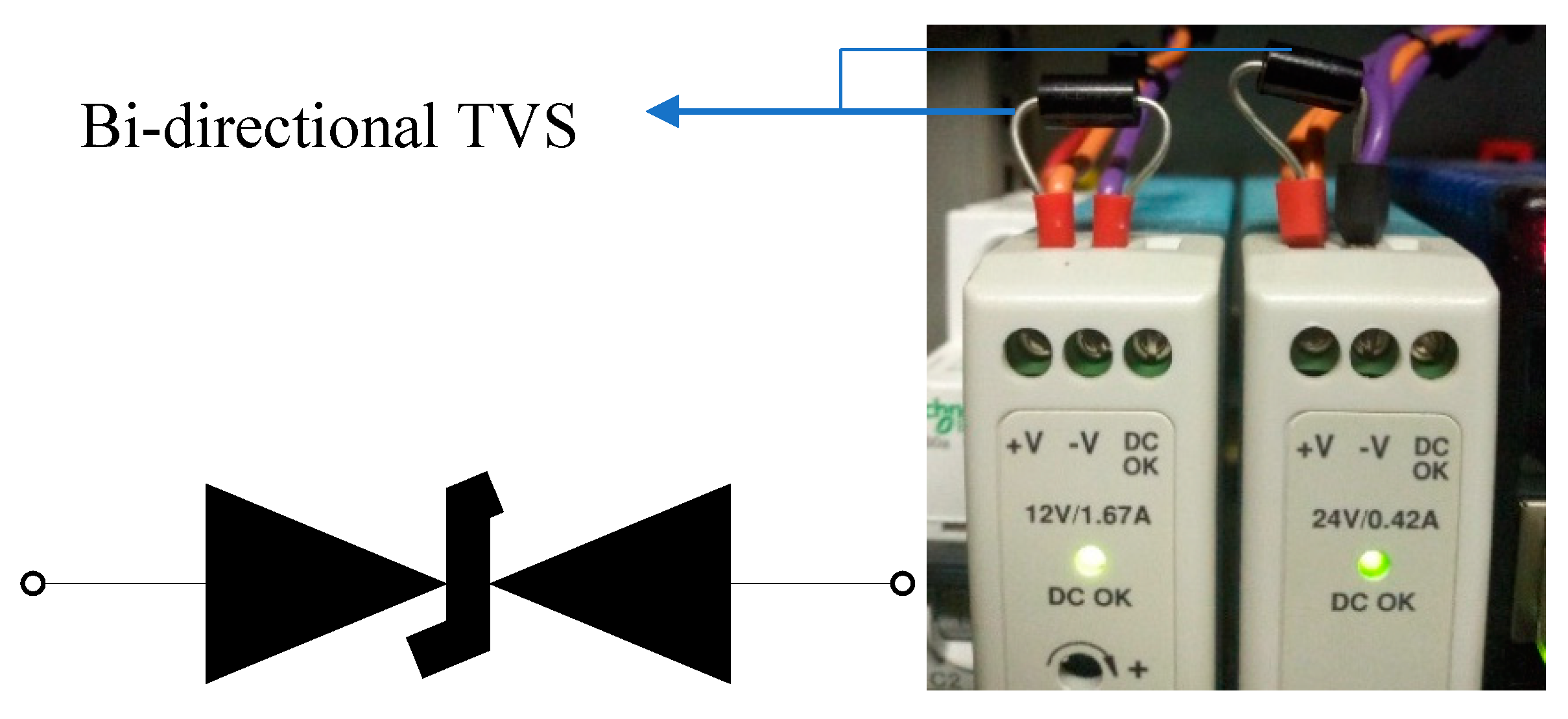
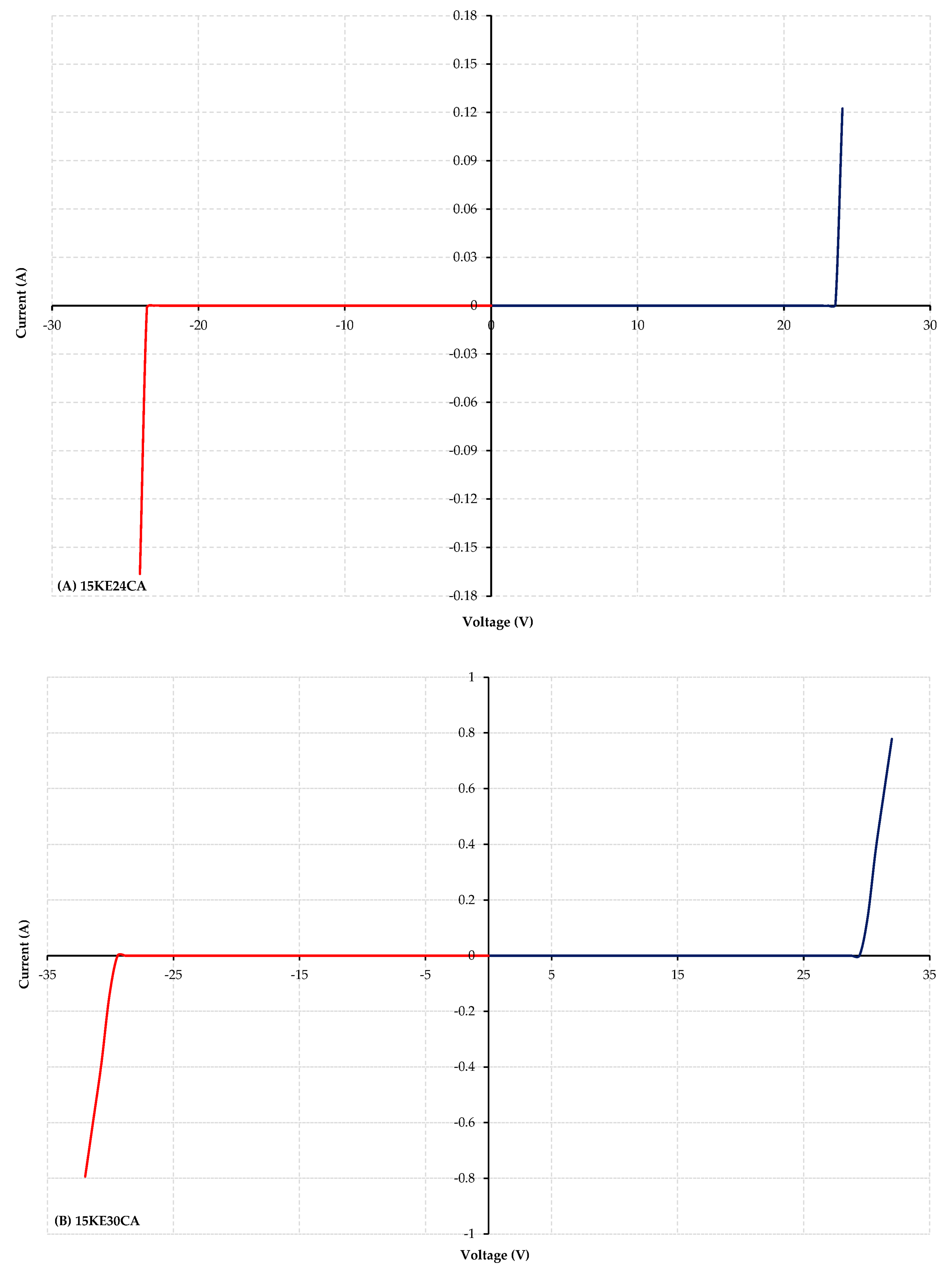
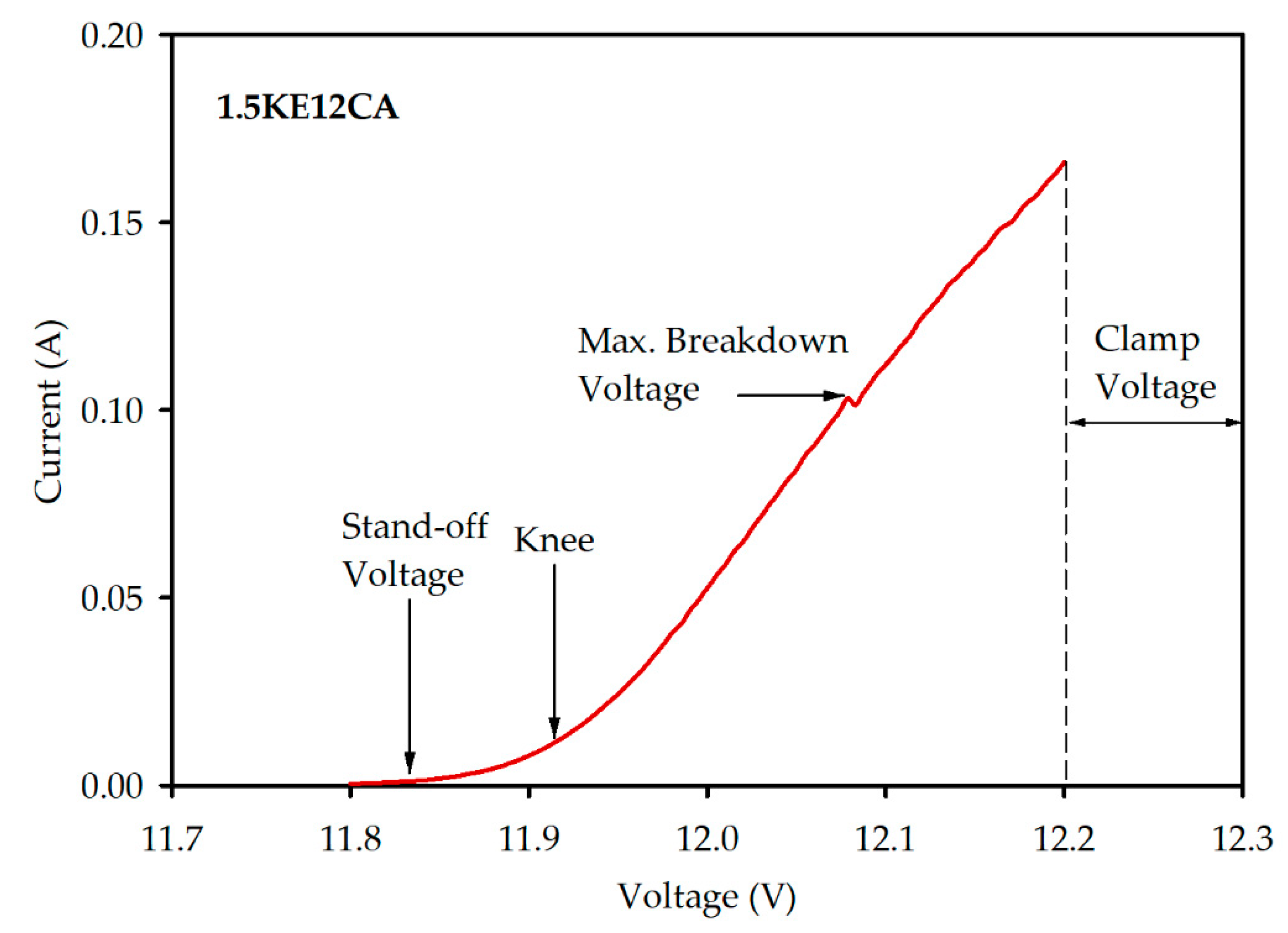
2.2.3. Transient Voltage Suppressors
2.2.4. Programmable Logic Control and Thermocouple Input Modules
2.2.5. Relays and Transistors
2.3. Autonomous Dynamic Adaptability System (ADAS)
2.4. Experimental Procedure
3. Results
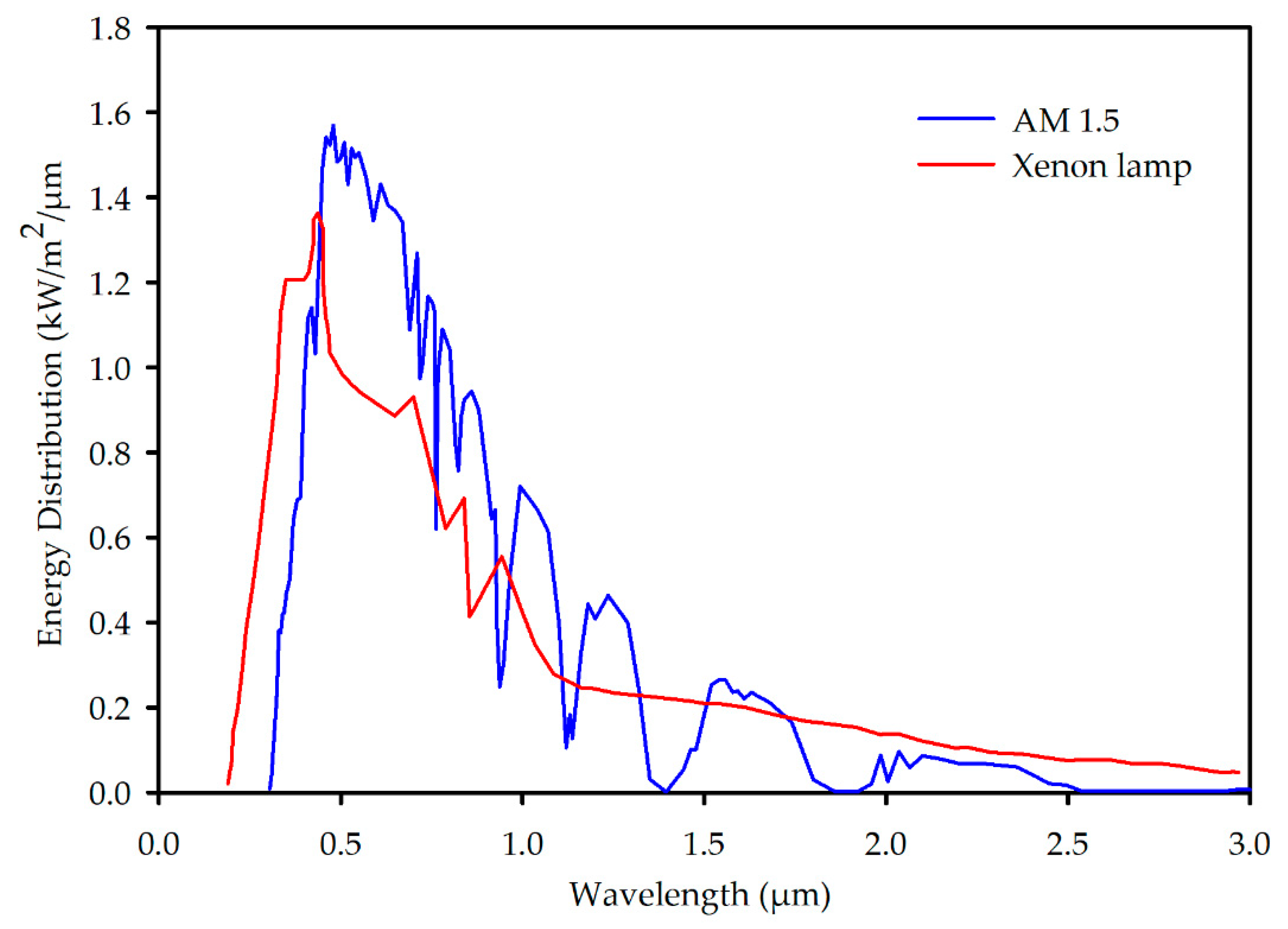
3.1. Solar Simulator Startup and Lamp Spectrum
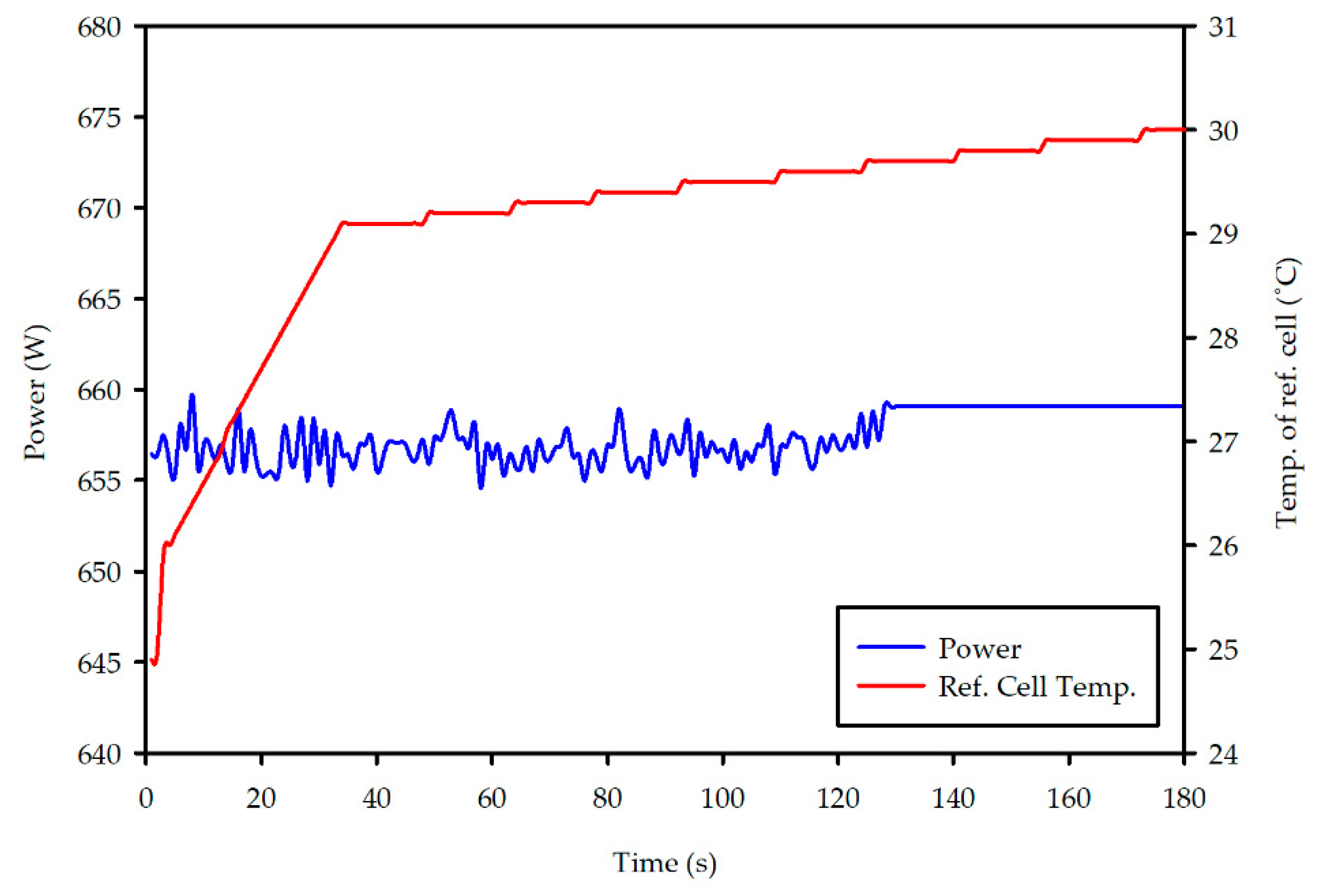
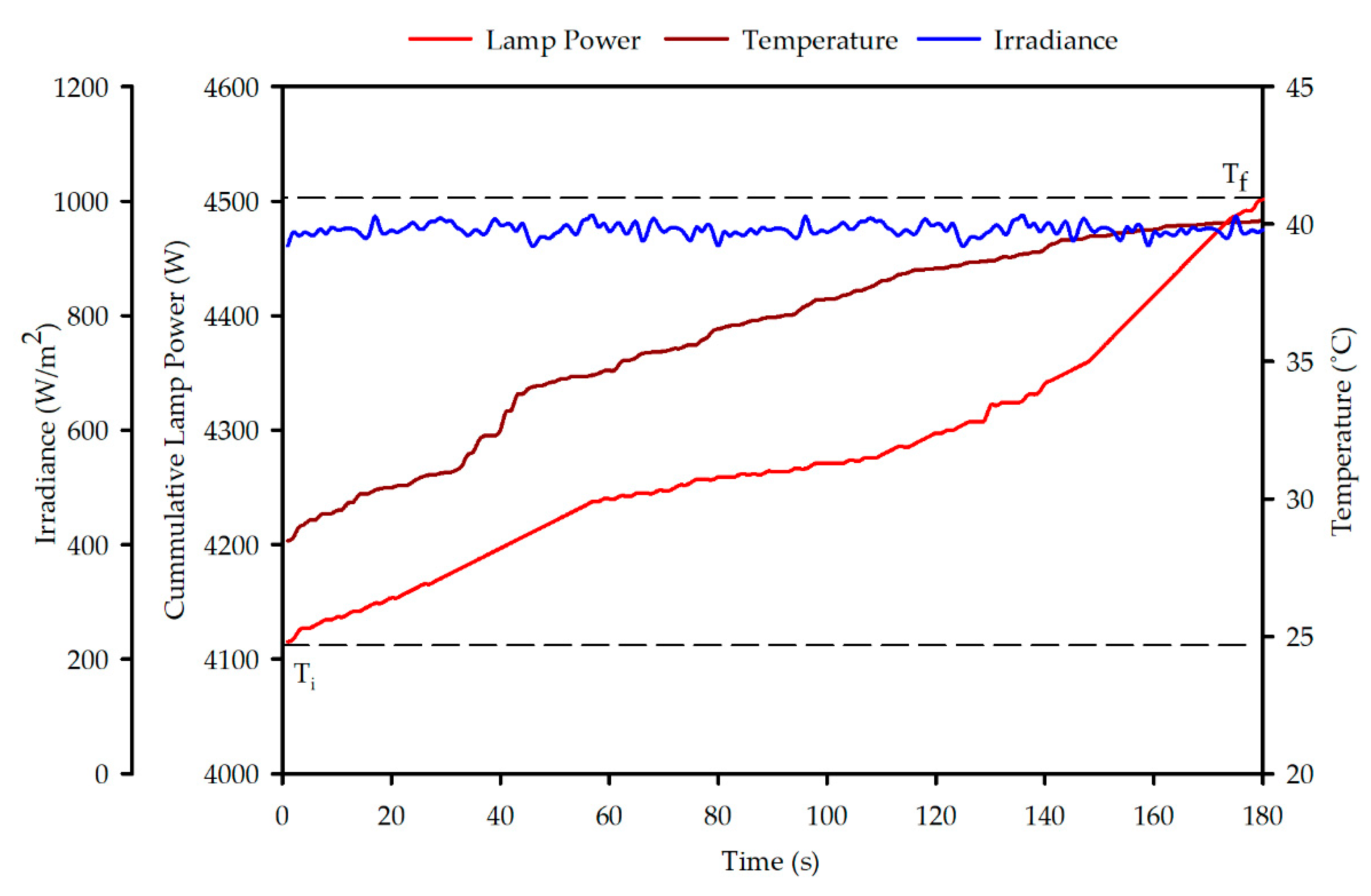
3.2. Varying Lamp Input Power and Temperature
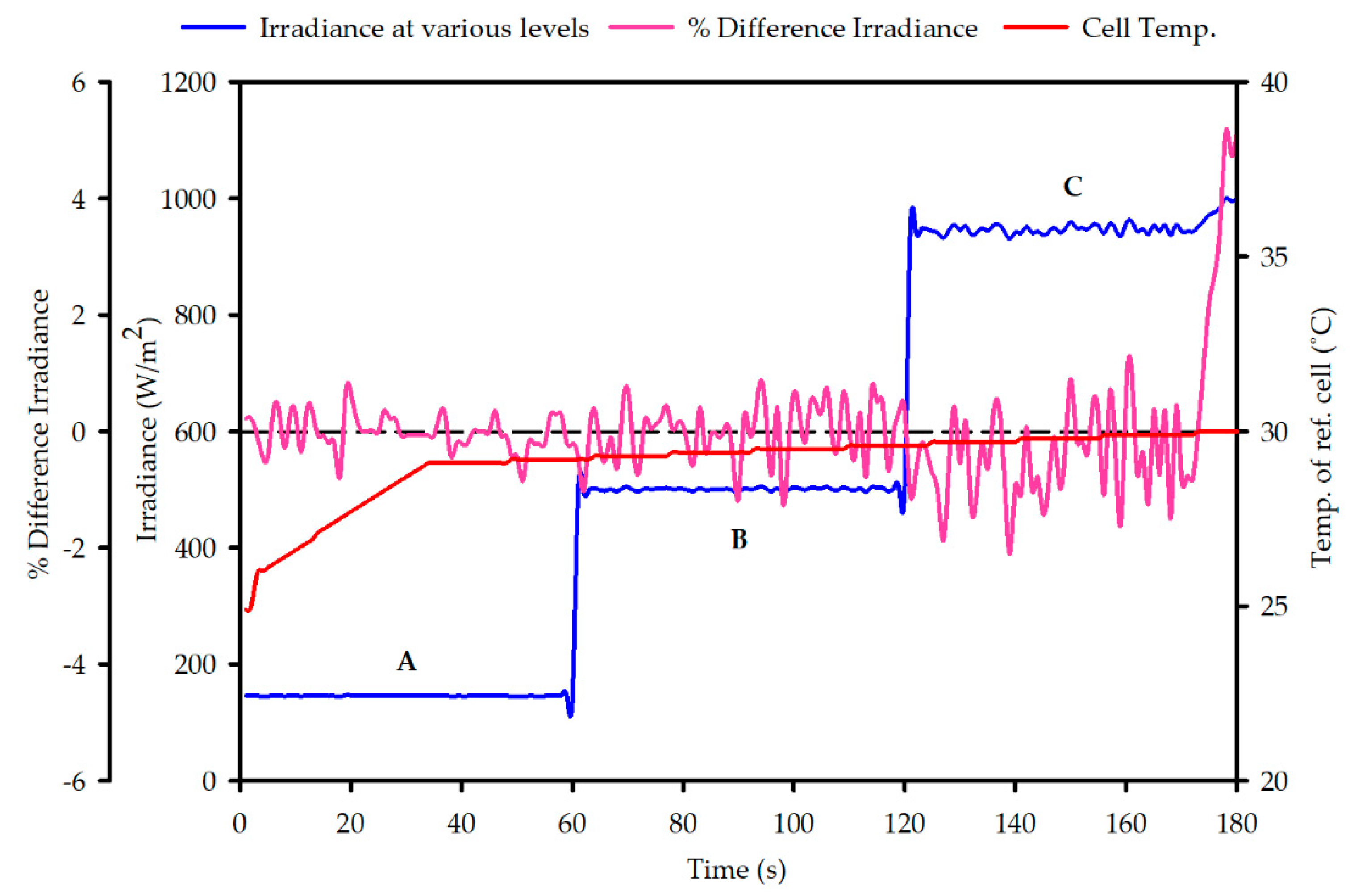
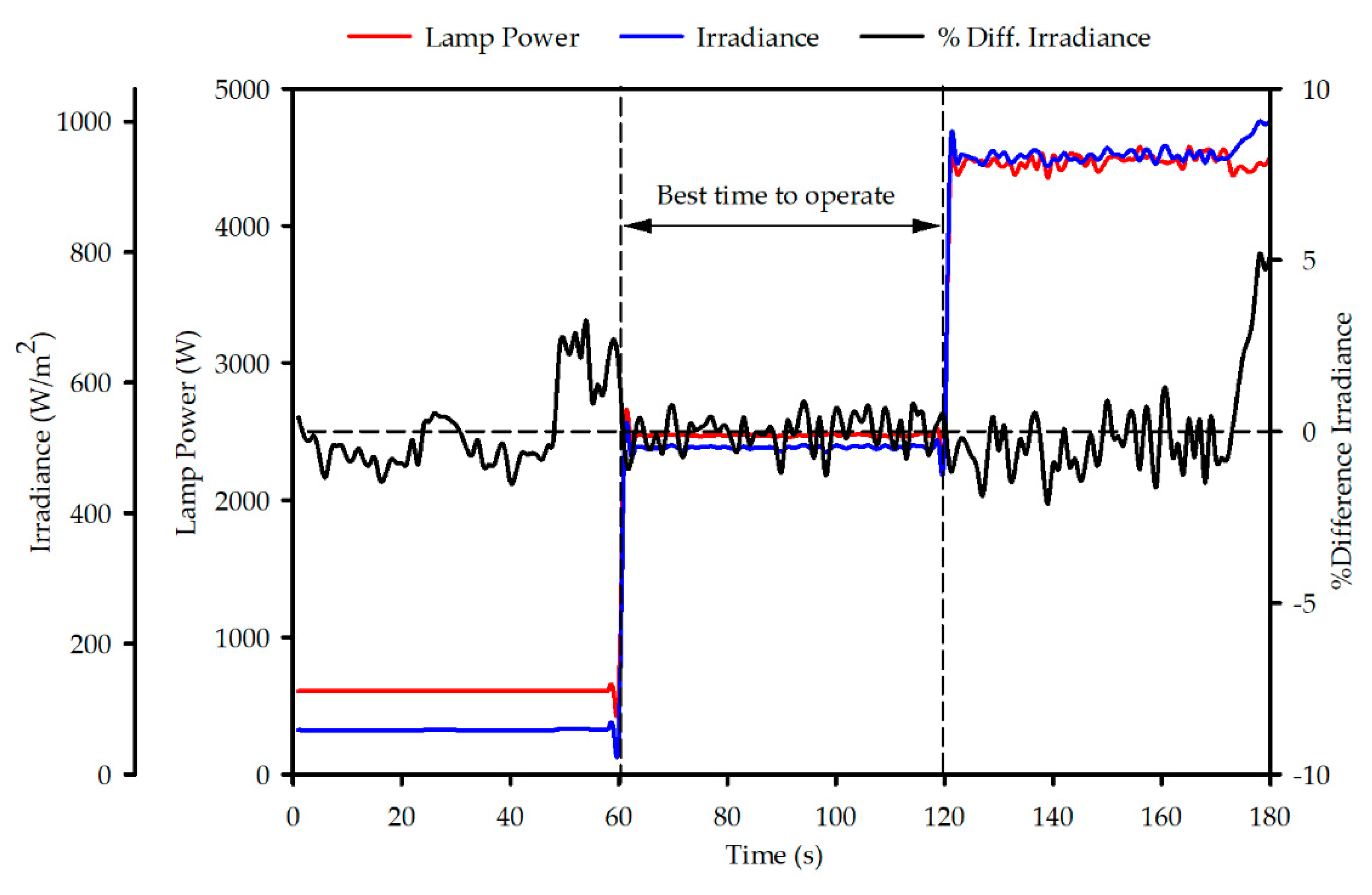
3.3. Investigating the Effectiveness of ADAS in Stop–Start Configuration
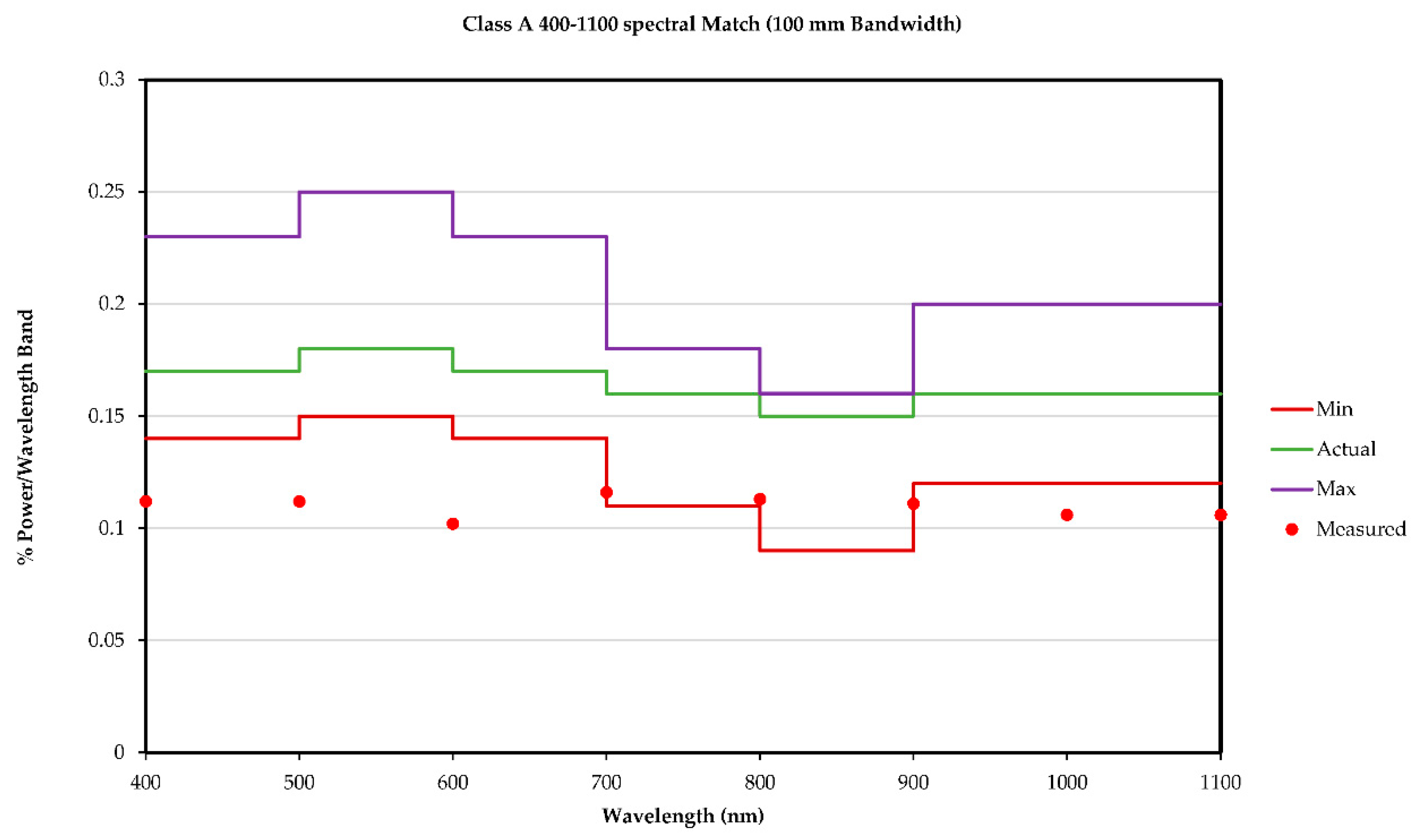
3.4. Solar Simulator Classification and Photovoltaic Module Characterisation
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rivola, D.; Dittmann, S.; Pravettoni, M.; Friesen, G.; Chianese, D. High-Speed Multi-Channel System for Solar Simulator Irradiance Non-Uniformity Measurement. In Proceedings of the 2014 IEEE 40th Photovoltaic Specialist Conference (PVSC), Denver, CO, USA, 8–13 June 2014; pp. 2611–2615. [Google Scholar] [CrossRef]
- Shinde, U.K.; Kadwane, S.G.; Keshri, R.K.; Gawande, S.P. Dual Mode Controller-Based Solar Photovoltaic Simulator for True PV Characteristics. Can. J. Elec. Comput. Eng. 2017, 40, 237–245. [Google Scholar] [CrossRef]
- Leary, G.; Switzer, G.; Kuntz, G.; Kaiser, T. Comparison of Xenon Lamp-Based and LED-Based Solar Simulators. In Proceedings of the 2016 IEEE 43rd Photovoltaic Specialists Conference (PVSC), Portland, OR, USA, 5–10 June 2016; pp. 3062–3067. [Google Scholar] [CrossRef] [Green Version]
- Gallo, A.; Marzo, A.; Fuentealba, E.; Alonso, E. High Flux Solar Simulators for Concentrated Solar Thermal Research: A review. Renew. Sust. Energ. Rev. 2017, 77, 1385–1402. [Google Scholar] [CrossRef]
- Photoemission Tech, Inc (PET). Available online: http://www.photoemission.com/techpapers/A%20step%20by%20step%20guide%20to%20selecting%20a%20Solar%20Simulator%20Ver.%203.pdf (accessed on 29 March 2018).
- Sarwar, J.; Georgakis, G.; LaChance, R.; Ozalp, N. Description and Characterization of an Adjustable Flux Solar Simulator for Solar Thermal, Thermochemical and Photovoltaic Applications. Sol. Energy 2014, 100, 179–194. [Google Scholar] [CrossRef]
- Namin, A.; Jivacate, C.; Chenvidhya, D.; Kirtikara, K.; Thongpron, J. Construction of Tungsten Halogen, Pulsed LED, and Combined Tungsten Halogen-LED Solar Simulators for Solar Cell-Characterization and Electrical Parameters Determination. Int. J. Photoenergy 2012, 2012, 9. [Google Scholar] [CrossRef] [Green Version]
- ASTM-E927. Standard Specification for Solar Simulation for Terrestrial Photovoltaic Testing; American Society for Testing and Materials International: West Conshohocken, PA, USA, 2005. [Google Scholar]
- Aojia, M.; Feng, G.; Yahui, L.; Lei, Z.; Chenlin, W.; Fugui, L. Synergetic Robust Fault Detection and Fault Tolerant Control for Flight Vehicles with Time-Varying Delay. In Proceedings of the 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 2594–2599. [Google Scholar] [CrossRef]
- Ahmed, S.N. Physics and Engineering of Radiation Detection, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Petrenci, R.; Frigura-Iliasa, M.; Frigura-Iliasa, F.M.; Mirica, M.; Balcu, F. Experimental Study About the Sintering Temperature of a New Metal Oxide Varistor Material. In Proceedings of the 10th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 30 November–2 December 2017; pp. 398–401. [Google Scholar]
- Lončar, B.; Vujisić, M.; Stanković, K.; Osmokrović, P. Stability of Metal-Oxide Varistor Characteristics in Exploitation Conditions. Acta Phys. Pol. A 2009, 116, 1081–1084. [Google Scholar] [CrossRef]
- Rao, X.; Guo, J.; Zhou, Y.; Wei, Q.; Liu, X. Research on Leakage Current Characteristic of Metal Oxide Varistor. In Proceedings of the 1st International Conference on Electrical Materials and Power Equipment (ICEMPE), Xi’an, China, 14–17 May 2001; pp. 680–685. [Google Scholar] [CrossRef]
- Wenhua, L.; Xiaoyong, W.; Xiaoyan, Z.; Fang, Y. Research on the Reliability Test Control System’s Design of the Miniature Circuit Breaker. In Proceedings of the 2009 IEEE International Symposium on Industrial Electronics, Seoul, South Korea, 5–8 July 2009; pp. 1380–1384. [Google Scholar] [CrossRef]
- Frank, M. Design of Transient Voltage Suppressors for Digital Inputs of Avionics Devices in Indirect Lightning Tests According to ED-14/DO-160. In Proceedings of the 2013 International Symposium on Electromagnetic Compatibility, Brugge, Belgium, 2–6 September 2013; pp. 833–836. [Google Scholar]
- Dai, S.H.; Lin, C.J.; King, Y.C. Leakage Suppression of Low-Voltage Transient Voltage Suppressor. IEEE Trans. Electron. Devices 2008, 55, 206–210. [Google Scholar] [CrossRef]
- Sinica, A.V.; Gluhov, A.V.; Skornjakov, S.P. Engineering Design of the Power Transient Voltage Suppressors for Network Protection Devices. In Proceedings of the 16th International Conference of Young Specialists on Micro/Nanotechnologies and Electron Devices, Erlagol, Russia, 29 June–3 July 2015; pp. 482–485. [Google Scholar] [CrossRef]
- Marum, S.; Duvvury, C.; Park, J.; Chadwick, A.; Jahanzeb, A. Protecting Circuits from The Transient Voltage Suppressor’s Residual Pulse During IEC 61000-4-2 Stress. In Proceedings of the 31st EOS/ESD Symposium, Anaheim, CA, USA, 30 August–4 September 2009; pp. 1–10. [Google Scholar]
- Kashyap, A.S.; Sandvik, P.; McMahon, J.; Bolotnikov, A.; Erlbaum, J.; Andarawis, E. Silicon Carbide Transient Voltage Suppressor for Next Generation Lightning Protection. In Proceedings of the 2014 IEEE Workshop on Wide Bandgap Power Devices and Applications, Knoxville, TN, USA, 13–15 October 2014; pp. 147–150. [Google Scholar] [CrossRef]
- Bustamante, M.; Moreno, G.; Pelaez, A.; Madrigal, C. Design and Implementation of an Automation Didactic Module Focused to Machine Vision and Programmable Logic Control. In Proceedings of the 2014 III International Congress of Engineering Mechatronics and Automation (CIIMA), Cartagena, Colombia, 22–24 October 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Meyer, E.L. On the Reliability, Degradation and Failure of Photovoltaic Modules. Ph.D. Thesis, University of Port Elizabeth, Port Elizabeth, South Africa, 2002. [Google Scholar]
- Sciuto, G.L.; Napoli, C.; Capizzi, G.; Shikler, R. Organic Solar Cells Defects Detection by Means of an Elliptical Basis Neural Network and A New Feature Extraction Technique. Optik 2019, 194, 163038. [Google Scholar] [CrossRef]
- Sciuto, G.L.; Capizzi, G.; Salvatore, C.; Shikler, R. Geometric Shape Optimisation of Organic Solar Cells for Efficiency Enhancement by Neural Networks. In Advances on Mechanics, Design Engineering and Manufacturing; Springer: Cham, Switzerland, 2017; pp. 789–796. [Google Scholar]
- Meyer, E.L.; Overen, O.K. Blue Skies and Red Sunsets: Reliability of Performance Parameters of Various Pn Junction Photovoltaic Module Technologies. Cogent Eng. 2019, 6, 1691805. [Google Scholar] [CrossRef]
- Beghi, G. Performance of Solar Energy Converters: Thermal Collectors and Photovoltaic Cells: Springer Science & Business Media: Lectures of a Course Held at the Joint Research Centre, Ispra, Italy, November 11–18, 1981; Springer Science & Business Media: London, UK, 2012. [Google Scholar]
- Rrushi, J.L. Defending Electrical Substations Against 0-Day Malware Through Decoy I/O in Protective Relays. In Proceedings of the 2017 IEEE 15th International Conference on Dependable, Autonomic and Secure Computing, 15th International Conference on Pervasive Intelligence and Computing, 3rd International Conference on Big Data Intelligence and Computing and Cyber Science and Technology Congress (DASC/PiCom/DataCom/CyberSciTech), Orlando, FL, USA, 6–10 November 2017; pp. 486–493. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Simulator Class (%) | ||
|---|---|---|---|
| A | B | C | |
| Spectral Match | ≤ 2 or ≤ 3 | ≤ 5 | ≤ 10 |
| (1 ± 0.1) | |||
| Spatial Non-uniformity | ≤ 2 or ≤ 3 | ≤ 5 | ≤ 10 |
| (3.26) | |||
| Temporal Instability | ≤ 2 | ≤ 5 | ≤ 10 |
| (3.93) | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meyer, E.L.; Nwodo, J.C. Autonomous Dynamic Adaptability System to Maintain Irradiance Levels in a Steady-State Solar Simulator. Appl. Sci. 2020, 10, 4534. https://doi.org/10.3390/app10134534
Meyer EL, Nwodo JC. Autonomous Dynamic Adaptability System to Maintain Irradiance Levels in a Steady-State Solar Simulator. Applied Sciences. 2020; 10(13):4534. https://doi.org/10.3390/app10134534
Chicago/Turabian StyleMeyer, Edson L., and Julian C. Nwodo. 2020. "Autonomous Dynamic Adaptability System to Maintain Irradiance Levels in a Steady-State Solar Simulator" Applied Sciences 10, no. 13: 4534. https://doi.org/10.3390/app10134534