Modeling of Conduction and Switching Losses for IGBT and FWD Based on SVPWM in Automobile Electric Drives


Abstract
:1. Introduction
- Considering the waveform of the collector–emitter voltage drop and the collector current at the instant of switching during the inverter operation, a piecewise linear model is proposed to simplify the real waveform to avoid the complex fitting and interpolation process. As for the proposed method, only one set of data under the rated operating condition should be measured, and the switching losses at other operating points can be calculated proportionately.
- To solve the piecewise integration of conduction losses, the piecewise periodic functions of the duty cycle are derived and studied, and the equivalent three-order harmonic model of the duty cycle is proposed based on Fourier series expansion. The simplified conduction losses model has the advantages of the lower computation requirements and the easy engineering implementation.
- The proposed losses model provides a simple and practical loss model based on SVPWM modulation in the automobile electrical drive application, and it provides a basis for the accurate junction temperature prediction of IGBTs.
2. Traditional Power Losses Model
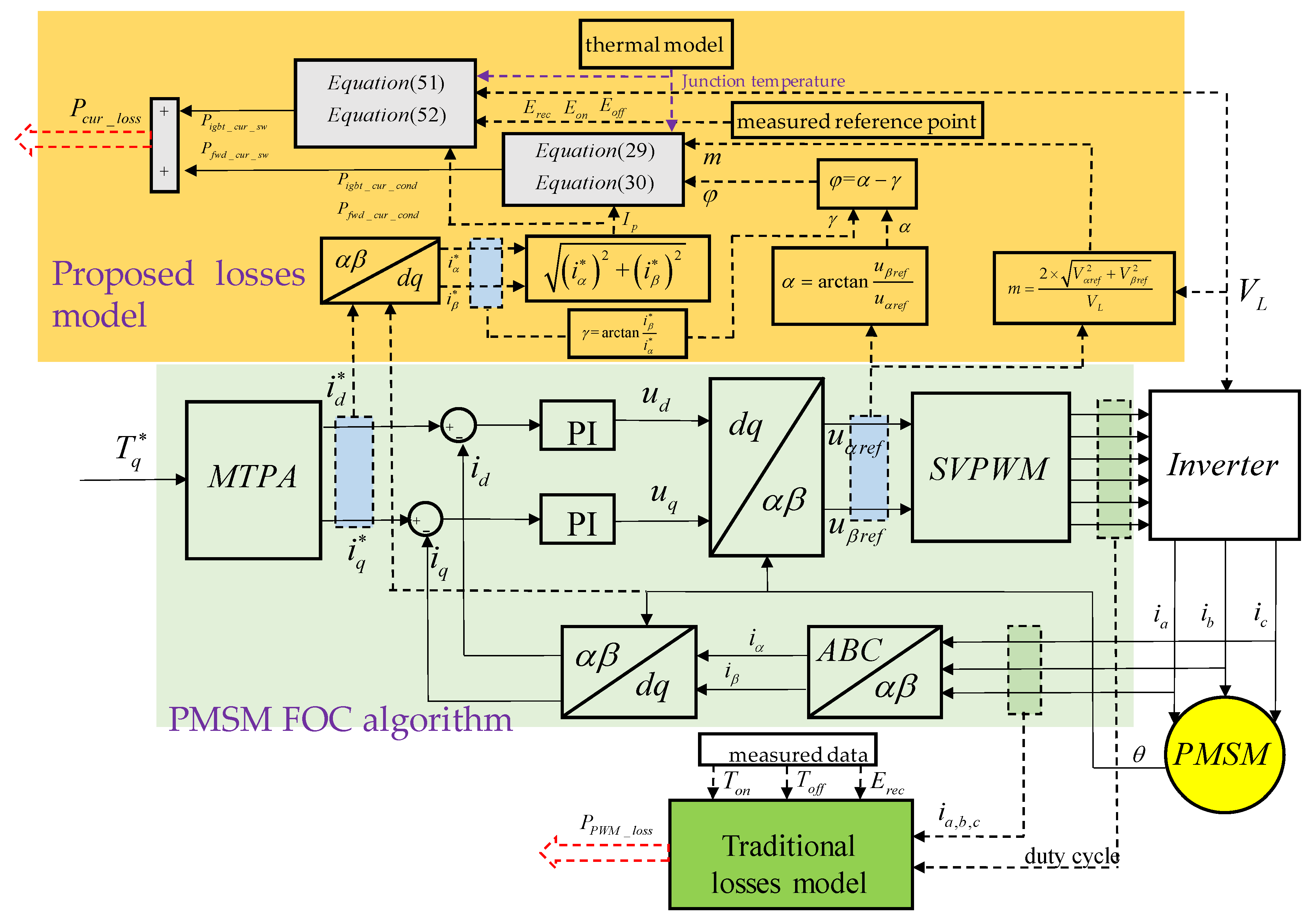
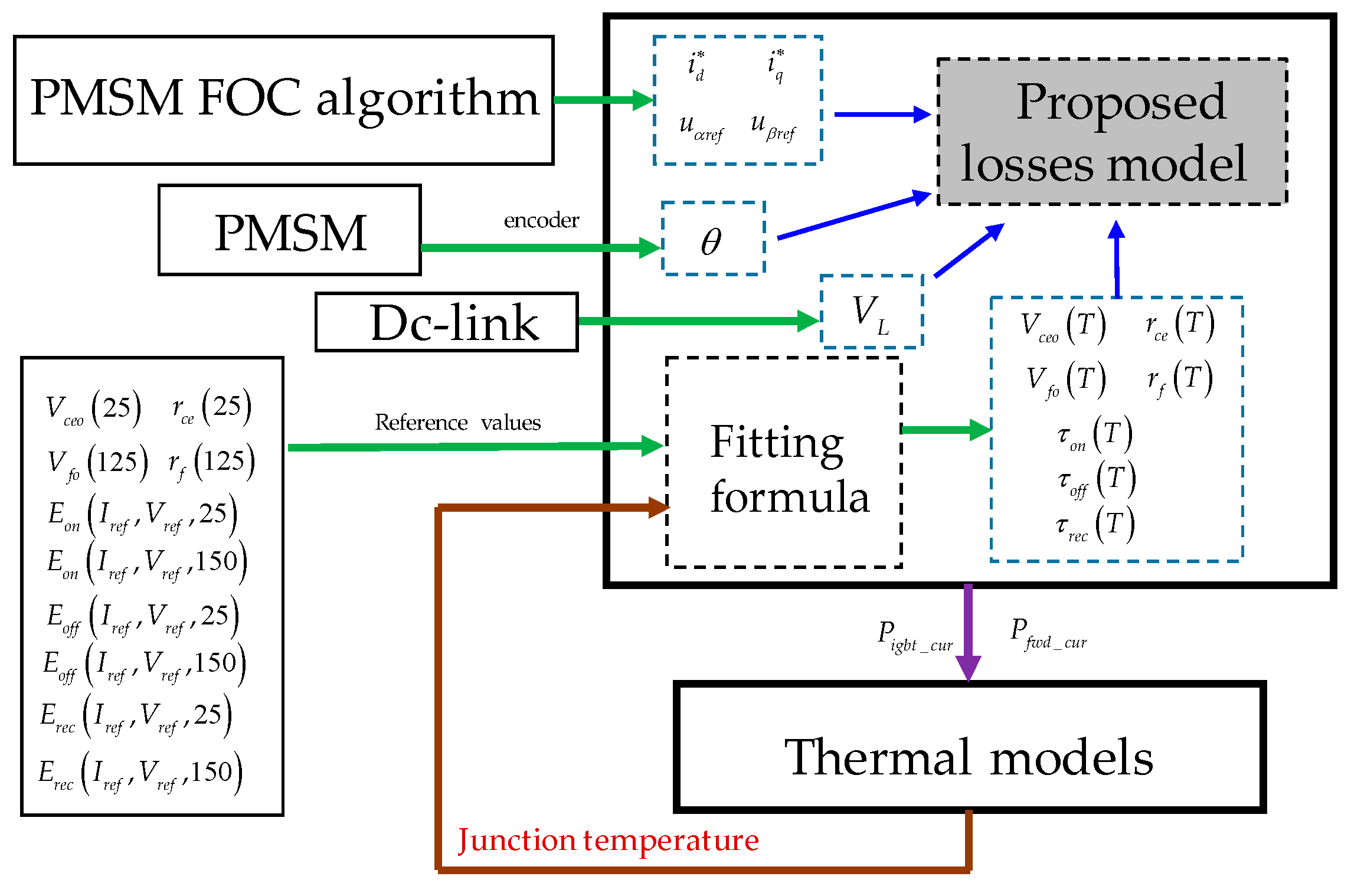
3. Proposed Power Losses Model
3.1. Proposed Conduction Losses Model
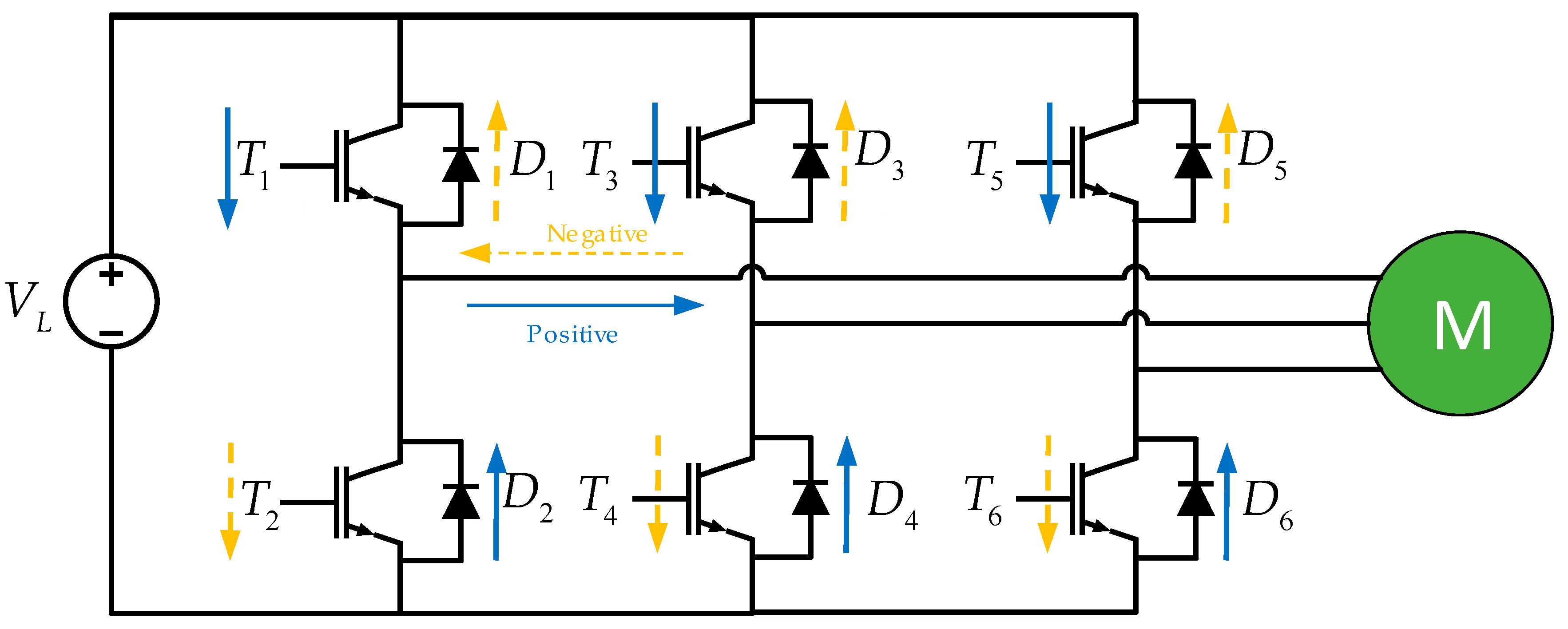
3.1.1. The Conduction Losses Based on Phase-Current Period
3.1.2. The Solution of the Duty Cycle Based on SVPWM
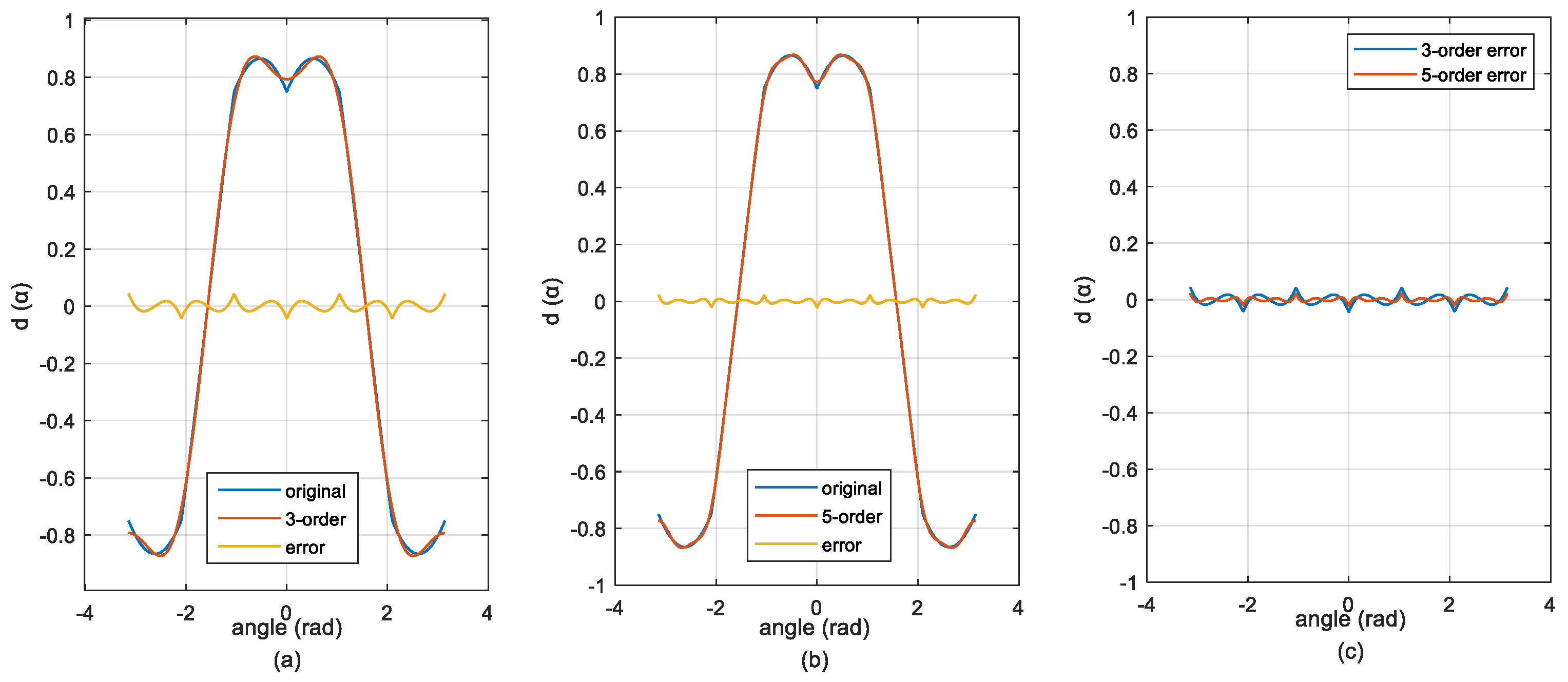
3.1.3. The Proposed Equivalent Three-Order Harmonic Model of the Duty Cycle
3.1.4. The Proposed Conduction Losses Model
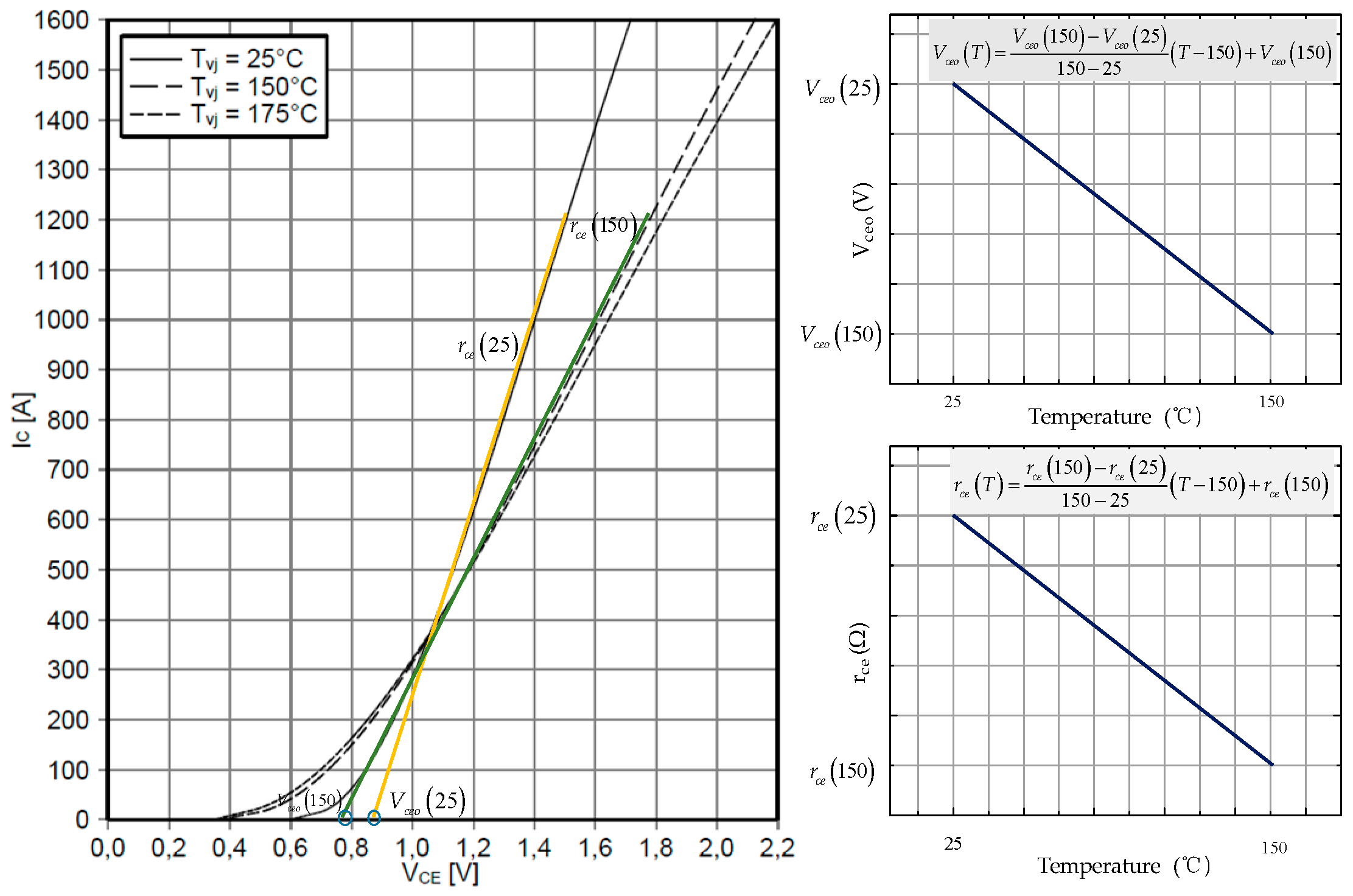
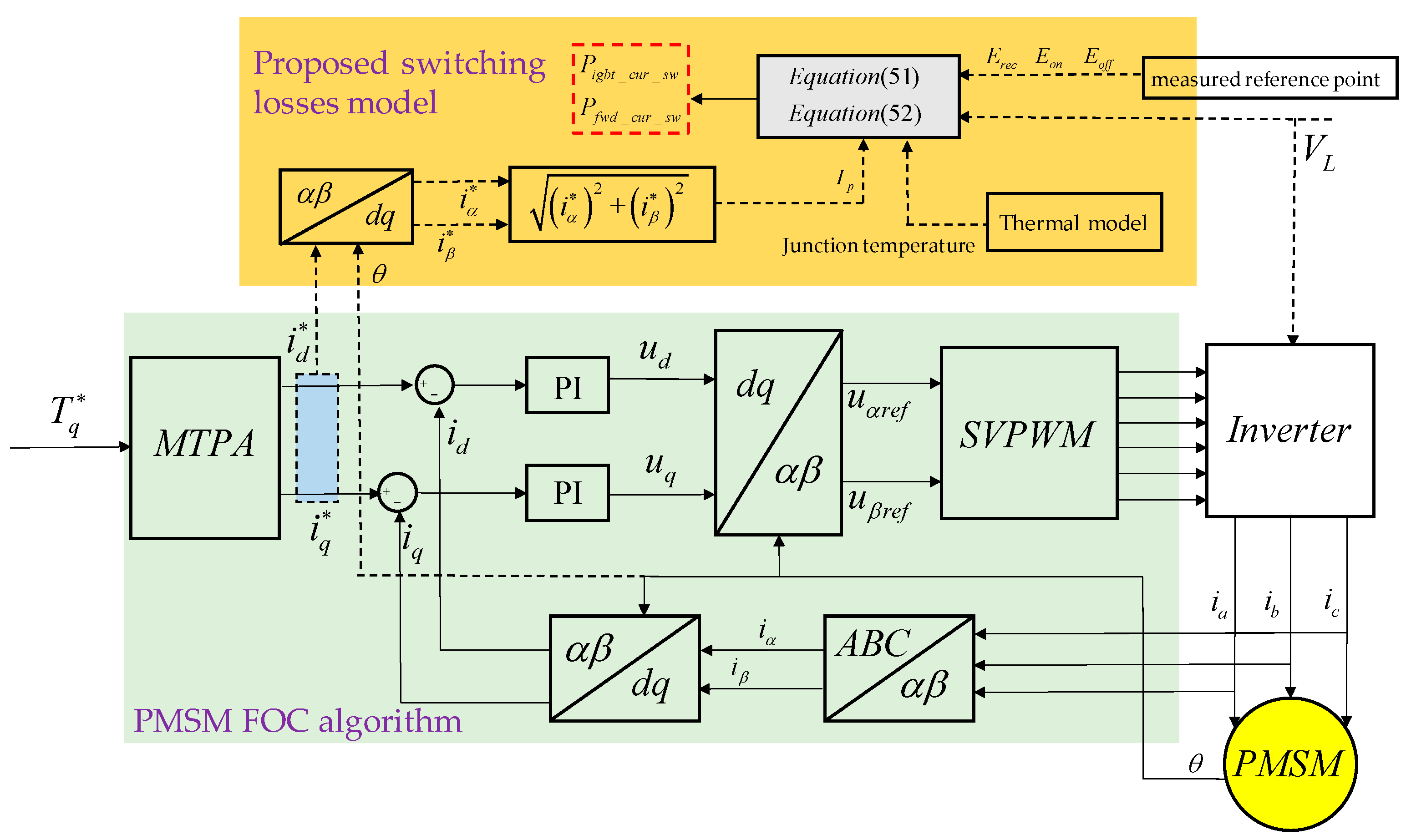
3.2. Proposed Switching Losses Model
4. Experimental Validation
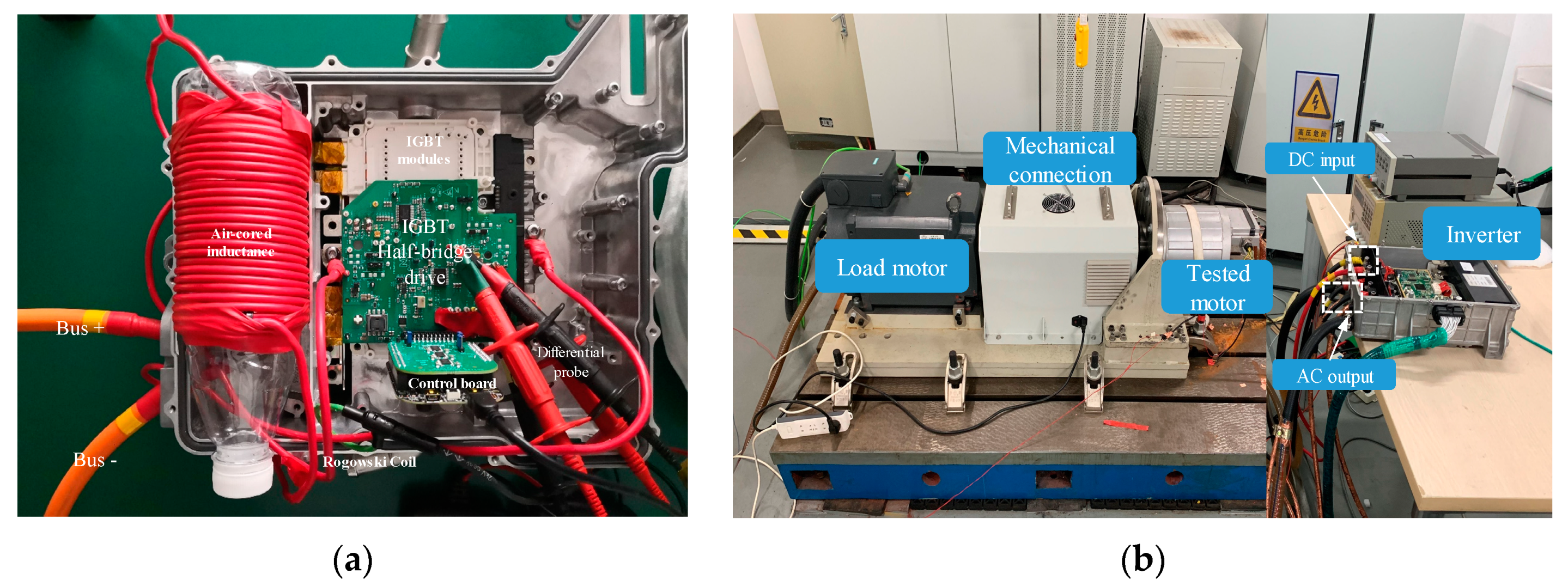
4.1. Experiment Setup
4.2. Validation of the Propsed Power Loss Model
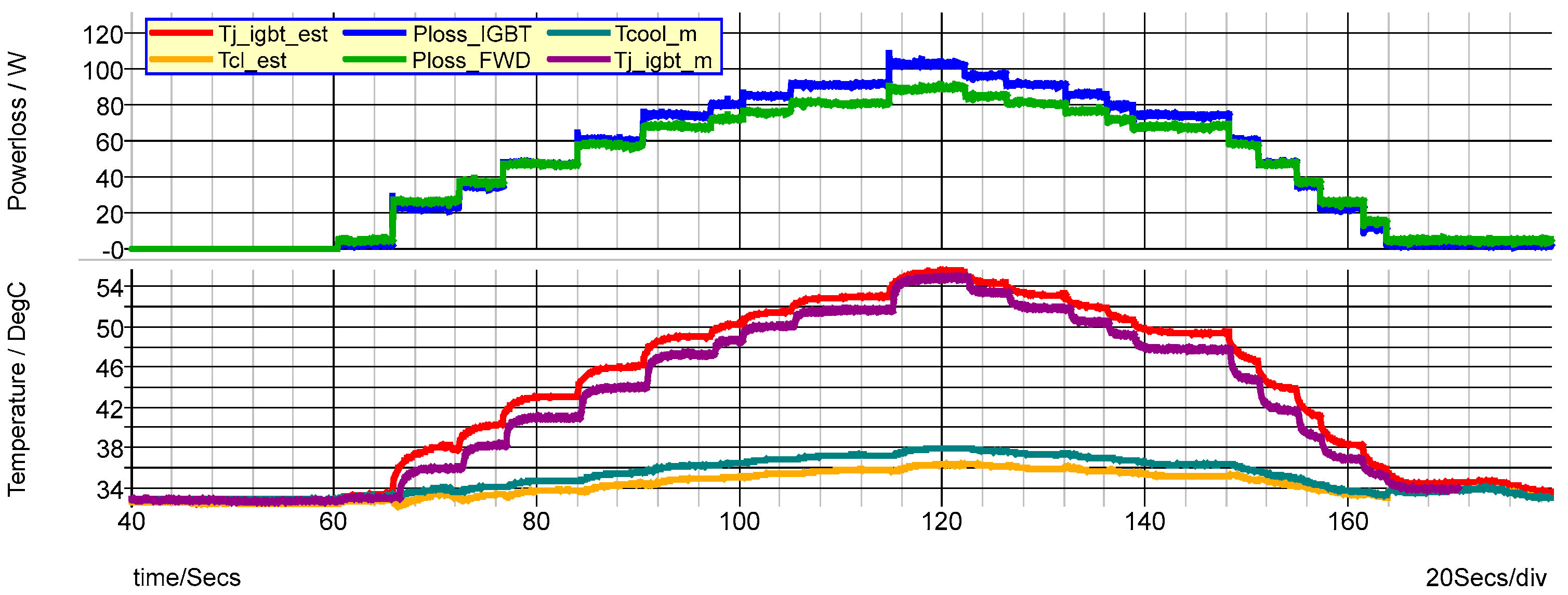
4.2.1. The Accuracy Validation of the Junction Temperature Prediction
4.2.2. Comparison of Two Losses Models
4.2.3. Comparison with the Results from the Power Analyzer
- The power losses of IGBT and FWD are calculated by the proposed losses model.
- The power losses of the bus-bar in the internal IGBT modules are calculated in Equation (54). The equivalent resistance represents the circuit resistance of switching tubes.
- The power losses of the dc bus-bar are calculated in Equation (55). The equivalent resistance means the equivalent resistance in the dc circuit and the dc current is 300 A.
- The ac bus-bar exists outside the three-phase IGBT modules and the equivalent resistance of every phase is 0.4 mΩ, so the power losses can be calculated as:
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wu, C.; Tsai, M.; Cheng, L. Design and implementation of position-based repetitive control torque observer for cogging torque compensation in PMSM. Appl. Sci. 2019, 10, 96. [Google Scholar] [CrossRef] [Green Version]
- Baek, S.; Lee, S.W. Design optimization and experimental verification of permanent magnet synchronous motor used in electric compressors in electric vehicles. Appl. Sci. 2020, 10, 3235. [Google Scholar] [CrossRef]
- Lascu, C.; Andreescu, G. PLL position and speed observer with integrated current observer for sensorless PMSM drives. IEEE. Trans. Ind. Electron. 2020, 67, 5990–5999. [Google Scholar] [CrossRef]
- Zhu, Y.; Xiao, M.; Lu, K.; Wu, Z.; Tao, B. A simplified thermal model and online temperature estimation method of permanent magnet synchronous motors. Appl. Sci. 2019, 9, 3158. [Google Scholar] [CrossRef] [Green Version]
- Bahman, A.S.; Ma, K.; Blaabjerg, F. A lumped thermal model including thermal coupling and thermal boundary conditions for high-power IGBT modules. IEEE Trans. Power Electron. 2018, 33, 2518–2530. [Google Scholar] [CrossRef]
- Guo, B.; Wang, F.; Aeloiza, E. A novel three-phase current source rectifier with delta-type input connection to reduce the device conduction loss. IEEE Trans. Power Electron. 2016, 31, 1074–1084. [Google Scholar] [CrossRef]
- Sadigh, A.K.; Dargahi, V.; Corzine, K.A. Analytical determination of conduction and switching power losses in flying-capacitor-based active neutral-point-clamped multilevel converter. IEEE. Trans. Power Electron. 2016, 31, 5473–5494. [Google Scholar] [CrossRef]
- Tu, Q.; Xu, Z. Power losses evaluation for modular multilevel converter with junction temperature feedback. In Proceedings of the 2011 IEEE power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–7. [Google Scholar]
- Zhihong, W.; Xiezu, S.; Yuan, Z. IGBT junction and coolant temperature estimation by thermal model. Microelectron. Reliab. 2018, 87, 168–182. [Google Scholar] [CrossRef]
- Zhang, J.; Du, X.; Yu, Y.; Zheng, S.; Sun, P.; Tai, H. Thermal parameter monitoring of igbt module using junction temperature cooling curves. IEEE. Trans. Ind. Electron. 2019, 66, 8148–8160. [Google Scholar] [CrossRef]
- Kou, B.; Wei, J.; Zhang, L. Switching and conduction loss reduction of dual-buck full-bridge inverter through ZVT soft-switching under full-cycle modulation. IEEE. Trans. Power Electron. 2020, 35, 5031–5046. [Google Scholar] [CrossRef]
- Huang, J.; Huang, H. Simulation study of a low switching loss FD-IGBT with high dI/dt and dV/dt controllability. IEEE. Trans. Electron. Devices 2018, 65, 5545–5548. [Google Scholar] [CrossRef]
- Sadegh, M.; Mostafa, Z. A high-voltage series-stacked IGBT switch with active energy recovery feature for pulsed power applications. IEEE. Trans. Ind. Electron. 2020, 67, 3650–3661. [Google Scholar]
- Zhang, F.; Yang, X.; Ren, Y.; Feng, L.; Chen, W.; Pei, Y. A hybrid active gate drive for switching loss reduction and voltage balancing of series-connected IGBTs. IEEE. Trans. Power Electron. 2017, 32, 7469–7481. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Jaeger, U.; Munk-Nielsen, S. Power losses in PWM-VSI inverter using NPT or PT IGBT devices. IEEE Trans. Power Electron. 1995, 10, 358–367. [Google Scholar] [CrossRef]
- Naushath, M.; Rajapakse, A. A novel method for estimation of IGBT switching losses in voltage source convertors through EMT simulations. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016. [Google Scholar]
- Krismer, F.; Kolar, J.W. Closed form solution for minimum conduction loss modulation of DAB converters. IEEE. Trans. Power Electron. 2012, 27, 174–188. [Google Scholar] [CrossRef]
- Schwager, L.; Tuysuz, A.; Zwyssig, C.; Kolar, J.W. Modeling and comparison of machine and converter losses for PWM and PAM in high-speed drives. IEEE. Trans. Ind. Appl. 2014, 50, 995–1006. [Google Scholar] [CrossRef]
- Babaie, A.; Karami, B.; Abrishamifar, A. Improved equations of switching loss and conduction loss in SPWM multilevel inverters. In Proceedings of the 2016 7th Power Electronics and Drive Systems Technologies Conference (PEDSTC), Tehran, Iran, 16–18 February 2016. [Google Scholar]
- Sadigh, A.K.; Dargahi, V.; Corzine, K.A. Investigation of conduction and switching power losses in modified stacked multicell converters. IEEE. Trans. Ind. Electron. 2016, 63, 7780–7791. [Google Scholar] [CrossRef]
- Votava, M.; Glasberger, T.; Peroutka, Z. Control of dual inverter with power losses minimization using svpwm and prediction with extended horizon. In Proceedings of the IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018. [Google Scholar]
- Chen, X.; Huang, S.; Li, B.; Xiang, Y. Losses and thermal calculation of IGBT and FWD in PWM inverter for electric engineering maintenance rolling stock. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Corzine, K.; Sadigh, A.K.; Dargahi, V. Analytical determination of conduction power loss and investigation of switching power loss for modified flying capacitor multicell converters. IET Power Electron. 2016, 9, 175–187. [Google Scholar]
- Ye, J.; Yang, K.; Ye, H.; Emadi, A. A fast electro-thermal model of traction inverters for electrified vehicles. IEEE Trans. Power Electron. 2017, 32, 3920–3934. [Google Scholar] [CrossRef]
- Shahjalal, M.; Ahmed, M.R.; Lu, H.; Bailey, C.; Forsyth, A.J. An analysis of the thermal interaction between components in power converter applications. IEEE Trans. Power Electron. 2020, 35, 9082–9094. [Google Scholar] [CrossRef]
- Batard, C.; Ginot, N.; Antonios, J. Lumped dynamic electrothermal model of IGBT module of inverters. IEEE Trans. Compon. Packag. Manuf. Technol. 2015, 5, 355–364. [Google Scholar] [CrossRef]
- Ahmed, H.; Benbouzid, M.; Ahsan, M.; Albarbar, A.; Shahjalal, M. Frequency adaptive parameter estimation of unbalanced and distorted power grid. IEEE Access 2020, 8, 8512–8519. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Currents | T1 | T2 | T3 | T4 | T5 | T6 |
|---|---|---|---|---|---|---|
| IA+ IB− IC− | DVceIA+ | 0 | 0 | 0 | (1–D)VceIB− | (1–D)VceIC− |
| IA+ IB+ IC− | DVceIA+ | DVceIB+ | 0 | 0 | 0 | (1–D)VceIC− |
| IA+ IB− IC+ | DVceIA+ | 0 | DVceIC+ | 0 | (1–D)VceIB− | 0 |
| IA− IB− IC+ | 0 | 0 | DVceIC+ | (1–D)VceIA− | (1–D)VceIB− | 0 |
| IA− IB+ IC− | 0 | DVceIB+ | 0 | (1–D)VceIA− | 0 | (1–D)VceIC− |
| IA− IB+ IC+ | 0 | DVceIB+ | DVceIC+ | (1–D)VceIA− | 0 | 0 |
| Currents | D1 | D2 | D3 | D4 | D5 | D6 |
|---|---|---|---|---|---|---|
| IA+ IB− IC− | 0 | DVfIB- | DVfIC− | (1–D)VfIA+ | 0 | 0 |
| IA+ IB+ IC− | 0 | 0 | DVfIC− | (1–D)VfIA+ | (1–D)VfIB+ | 0 |
| IA+ IB− IC+ | 0 | DVfIB− | 0 | (1–D)VfIA+ | 0 | (1–D)VfIC+ |
| IA− IB− IC+ | DVfIA− | DVfIB− | 0 | 0 | 0 | (1–D)VfIC+ |
| IA− IB+ IC- | DVfIA− | 0 | DVfIC− | 0 | (1–D)VfIB+ | 0 |
| IA− IB+ IC+ | DVfIA− | 0 | 0 | 0 | (1–D)VfIB+ | (1–D)VfIC+ |
| Parameters | Value |
|---|---|
| stator resistance | 0.012(Ω) |
| d-axis inductance | 0.00105(H) |
| q-axis inductance | 0.00252(H) |
| flux | 0.012(Wb) |
| pole pairs | 4 |
| Power Losses | Equivalent Resistance (mΩ) | Values (W) |
|---|---|---|
| IGBT chips | 2340 | |
| FWD chips | 660 | |
| Bus-bar in the internal IGBT modules | 0.75 | 562.5 |
| Dc bus-bar | 0.53 | 47.7 |
| Dc-link capacitance | 16 | |
| External ac bus of three-phase IGBT modules | 0.4 | 300 |
| Total | 3926.2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Xiao, M.; Su, X.; Yang, G.; Lu, K.; Wu, Z. Modeling of Conduction and Switching Losses for IGBT and FWD Based on SVPWM in Automobile Electric Drives. Appl. Sci. 2020, 10, 4539. https://doi.org/10.3390/app10134539
Zhu Y, Xiao M, Su X, Yang G, Lu K, Wu Z. Modeling of Conduction and Switching Losses for IGBT and FWD Based on SVPWM in Automobile Electric Drives. Applied Sciences. 2020; 10(13):4539. https://doi.org/10.3390/app10134539
Chicago/Turabian StyleZhu, Yuan, Mingkang Xiao, Xiezu Su, Gang Yang, Ke Lu, and Zhihong Wu. 2020. "Modeling of Conduction and Switching Losses for IGBT and FWD Based on SVPWM in Automobile Electric Drives" Applied Sciences 10, no. 13: 4539. https://doi.org/10.3390/app10134539
APA StyleZhu, Y., Xiao, M., Su, X., Yang, G., Lu, K., & Wu, Z. (2020). Modeling of Conduction and Switching Losses for IGBT and FWD Based on SVPWM in Automobile Electric Drives. Applied Sciences, 10(13), 4539. https://doi.org/10.3390/app10134539