1. Introduction
In the new industrial era, ergonomics is crucial for occupational safety and productivity improvement in different manufacturing sectors such as the automotive and aerospace industry, which is one of the largest and most demanding production areas. Therefore, safety is a fundamental aspect that is sought through the use of improved tools in production processes, and the implementation of efficient and safe techniques to adapt people to work in order to optimize well-being and to increase productivity.
Focusing on the aerospace field, the design of appropriate workstations is essential to improve occupational health, safety and work efficiency [
1]. Even if aerospace production is not as systematized as automotive production—with much longer cycle times—it is equally affected by ergonomic issues. On the contrary, in many working activities characterizing aerospace production lines, the biomechanical load is very high due to awkward postures, lifting heavy components, exerting high forces and repetitive actions. Even in the case of the aerospace industry, if workers are subject to these factors, the risk of injury and muscle fatigue is high [
2].
Many studies show that interactions among humans, technologies, organizations and working environments are strictly influenced by ergonomics. Often, the main causes of quality deficiencies are associated with ergonomic issues in terms of environmental conditions, suitable design of technology and an inappropriate organization [
3].
Therefore, ergonomics may become the driving force for the improvement of new quality processes and production strategies. In aerospace field, improving ergonomics allows reaching the aim of producing high quality aircraft through the study of human specifications for the suitable design of the living and working environment [
4]. Tools, devices, machines, appliances and the environment all lead to the advancement of the safety levels, well-being and human performances, as suggested by Kroemer et al. [
5].
In industry, humans represent the primary production resource, and their efficiency in performing working tasks represents the main factor of productivity, a primary factor of economic activity [
6].
In the literature concerning aerospace applications, it is possible to find many studies on the analysis of ergonomic aspects such as the safety and comfort in the passenger cabin and passenger compartment. These studies are mainly focused on the assessment of key factors, such as head and legroom and the ease with which the stowage can be reached. However, from the production process point of view, rarely ergonomic factors have been analyzed during the assembly phases, applying ergonomics principles only in borderline situations and in limited space, a typical condition to which the operators are exposed, which increase the risk of musculoskeletal injuries [
7].
In this sense, studies were conducted during the wing assembly phases which, as most aerospace components, require static and uncomfortable postures that increase the risk of physical illness and hinder the execution of tasks. Different solutions to optimize the assembly process were investigated [
8,
9], by changing the orientation and accessibility of the product through the introduction of a rotating device capable of keeping the entire wing in an open box condition and allowing the operator to assume ergonomic postures.
However, except in rare case, since ergonomics has never been adequately considered, the need to design new production lines, based on ergonomics principles, arises; in this case, simulation tools and virtual ergonomics are essential to design safe and high-performance workstations [
10]. Indeed, in the recent years the industrial world is experiencing a massive implementation of digital technological systems. These could be useful for better verifying and validating the ergonomic factors in the design, production and maintenance processes and, in general, for testing the design solutions and the functionality of machines or robots. This allows detecting certain errors before the real production phases.
About ergonomics, simulation and digital twin (DT) allow considering human factors preventively, since the design phase. This is a fundamental aspect of the Industry 4.0 paradigm, which has the human-centered design as one of its main pillars.
In the literature, there are many studies focused on the use of virtual simulation for investigating the ergonomic issues in manufacturing production processes, especially for the automotive sector [
11,
12,
13,
14,
15], even if, as demonstrated by Cimino et al. [
16], in the current literature, DTs have many missing elements to be compliant to their description. The numeric approach provided by DT and simulation, gives the opportunity to simulate manual or automatized working tasks and, hence, to evaluate the performance indices and to identify critical issues in a virtual scenario, without any real experimental test.
A further potential contribution for reducing exposure to occupational risk and at the same time increasing production efficiency is certainly the introduction of robots into the production system.
The use of high-tech industrial robotics, now widespread in all manufacturing sectors, is finding its way into almost all phases of the production process, from automated and flexible assembly to component processing, from production control to final palletization in order to guarantee control, quality and flexibility. Obviously, the use of robots is also changing the human role, which in the era of Industry 4.0 is becoming smarter than before, leaving to robots and machines the hardest tasks [
17].
In aerospace, this implementation is currently not comparable to other production fields. Assembly in aircraft production is among the least automated sectors of the industry for different reasons. These are large and complex systems that involve a very wide variety of activities to be carried out in the production phases, whose aerospace components require low production numbers, with processes that require hours of work for the single component.
The workspace is limited and with the presence of obstacles and technical barriers in compliance with the need to achieve high levels of quality and precision and to satisfy safety and reliability. In response to the relative difficulties in introducing robotics in the aerospace sector, research is moving towards the implementation of robotic instrumentation initially tested through artificial visions and virtual prototyping, offering new perspectives to aerospace production.
In different studies, the strong benefits that the use of robotics can bring within the aerospace process are being understood, as in the case of Tingelstad et al. [
18]. They have shown how the use of industrial robots, associated with a high precision noncontact measurement system, allows automating some assembly and spot welding operations for aerospace components.
The application of the human-centered design approach and the introduction of robots that can interact with humans in the production system could represent a challenge for the aerospace industry which, as demonstrated by the lack of literature, is still linked to essentially manual and no repeatable production systems. In particular, the use of virtual simulation, being an open issue for aerospace applications, will allow technical data to be transformed into three-dimensional designs with a strong visual impact covering all phases of the design cycle.
Aim of this study, part of a Clean Sky Horizon 2020 research project, is to present a methodology that, by using simulation, enables users to evaluate advantages due to the introduction of a HRI in a completely manual work cell before the cell is physically realized. Results from a real case are presented. Case study is about the reorganization of the working activity carried out in a workstation in which a composite fuselage panel is assembled no more only by humans. In detail, robots will be introduced for carrying out several operations, sharing the same working space with the worker and respecting all the safety requirements. As already partially presented in [
19], the introduction of HRI enables both a working times reduction and also an improvement of the workload for humans, as demonstrated in the following sections. By performing a simulation, the adopted solution was verified and the ergonomic index related to postures assumed by workers during manual tasks was evaluated by mean of OWAS (Ovako working posture analysis system) method.
The use of digital models and simulation represents a fundamental step for solving validation studies for the introduction of automatic processing systems instead of the traditional systems used for composite materials, which are very often manual and not repeatable.
The reminder of this study is organized as follows:
Section 2 focused on the Human–Robot Interactions and its advantages for industrial applications. Moreover, a wide overview about the regulatory framework in robotics is provided.
Section 3 describes the methodology herein used to assess benefits of HRI introduction.
Section 4 describes the investigated case study regarding a real workstation in aerospace production line, that will be only described using words or misaligned data to preserve the confidentiality of the project results; in particular, a composite fuselage panel is assembled and riveted, with a detailed description about a numeric simulation and the data provided.
Section 5 presents results analyses and discussion while
Section 6 further concludes the study.
2. Human–Robot Interaction and Regulatory Frameworks
Recently, there has been a massive growth of the interest by industries about the possibility to introduce safe robots in their production lines in order to improve the production itself by letting robots share common space with humans. Humans and robots could potentially execute a variety of useful tasks under safety premises [
20]. The study of robotic systems capable of perceiving the environment in a complex way and to interact with it is a recurring topic especially in the human–robot interaction field and represents the starting point for advanced research and technology transfer, considering interfaces and human–robot interaction one of the main research objects of the discipline of robotics.
Typically, HRI is often associated with the use of collaborative robots. However, an interesting differentiation has been proposed by Schmidtler et al. [
21], which identifies three kinds of interaction: coexistence, cooperation and collaboration. Coexistence occurs when human and robot are in the same space at the same time. In cooperation, humans and robots share the same aim. However, by adding a physical contact (auditory or haptic), it is possible to talk about collaboration.
Other levels of interaction have been introduced by Shi et al. [
22]: (i) low—when the human does not enter the working space of robotic system; (ii) medium—characterized by a de-energization of servo drives when human is close; (iii) high—when the robot can move near humans.
Bender et al. [
23] even proposed five levels of interaction: cell—when the robot is in a cage; coexistence—when human and robot does not share the workspace not shared; synchronized—when only one between human and robot is present at a time; cooperation—when human and robot share the workspace, but they do not perform simultaneous tasks; collaboration—when human and robot work on the same product simultaneously.
As a still open issue, many other differentiations have been proposed in the literature—even if none of them is exhaustive [
24]. Regardless, in the future, HRI will surely tend increasingly towards replicating human–human interactions.
The introduction of robots into a workspace to carry out assembly operations allows to achieve several benefits, especially regarding the quality of operations, task repeatability, reduction of working times and reduction of ergonomic risk.
Table 1 describes the pros and the cons considering three modes of working in a workstation: only human, only robot and human and robot together (HRI).
However, improved quality of life and increased levels of occupational safety are the basis for the massive introduction of flexible automation in current production processes. In the case of repetitive, monotonous and dangerous tasks, the implementation of robotic systems makes it possible to increase the quality and precision of work [
25] as well as reduce production costs and the relationship between humans and robots that defines the morphology of increasingly flexible, sustainable, ergonomic, intelligent and smart factories [
26]. Sensors, machines, workers and IT systems connected to each other along the value chain, give rise to countless technical and economic benefits for future manufacturing through the use of different technologies that fit into the different industrial phases, starting from product/process design, monitoring and control, production operations, services.
The factory of the future will be characterized by human–machine coexistence, cooperation and coordination where the latter adapts to human’s times and ways and through which advantages such as production flexibility, high performance and competitiveness on the global market are generated. The autonomy of "evolved" robots derives from the ability to process information collected by sensors and to plan the sequence of actions to be taken.
Thanks to numerous studies on safety in HRI that are being conducted [
27], it is plausible to argue that robots interacting with humans will not require perimeter security fences. The will replace human in performing repetitive or dangerous working tasks, increasing the efficiency of industrial plants and ensuring the workers’ safety. Among these types of robots, currently Collaborative Robots are undoubtedly the most widespread in innovative industrial contexts, representing the avant-garde of robotics in the industry. However, as anticipated, there is concern about its impact on occupational health and safety management [
28].
In the complexity of a HRI, the physical viewpoint is mainly focused on the risks of collisions occurring between the robot and its user [
29].
Human–robot collaboration needs to deep-in safety aspects, comfort of use, safety perception and ergonomic guidelines. Technical specifications and standards, such as ISO TS/15066 [
30], are taken into account, which provides guidance for the use of robots in collaborative operations based on safety requirements. ISO TS/15066 integrates the provisions and guidelines on the operation of collaborative industrial robots indicated in ISO 10218-1 [
31] and ISO 10218-2 [
32]. The current safety standards related to the discipline of robotics are actively updated in order to respond to any problems encountered in working environments.
ISO 12218 is divided into two parts: ISO 10218-1:2011 Robots and robot equipment—safety requirements for industrial robots; Part 1: Robots; ISO 10218-2: 2011 Robots and robot equipment—Safety requirements for industrial robots; Part 2: Robot systems and robot integration.
In the first part, a guidance for safety in design, protective measures and instructions about the use of industrial robots are introduced, describing the basic hazards and providing characteristics needed to eliminate or, at least, reduce the risks associated with them. The second part specifies the hazards arising from the integration of industrial robots into production lines and identifies the minimum safety requirements from undertaken by manufacturer, supplier and user to ensure a safe working environment.
Going into detail about the type of robots, the standard that concerns specific collaborative robots is ISO/TS 15066:2016, specifying the safety requirements for industrial collaborative robotic systems and the working environment. Designers of robotic systems must have full knowledge of current safety standards and must proceed according to the concept of awareness, fault tolerance and explicit communication, relying on the needs of research in the safety area [
33]. This attention enables to move scientific progresses achieved in the field of HRI to an industrial level [
34].
From ISO 10218 to ISO/TS 15066:2016
Currently, this specification is the most detailed document which gives guidelines about safety requirements in the field of collaborative industrial robot work cells and it is mainly focused on mechanical risk.
According to the specification, to ensure a safe collaboration among human workers and robot systems, mechanical risks must be minimized in order to avoid unexpected contacts in terms of gravity and/or probability. ISO/TS 15066 introduces four different methods for safe HRI: Safety-rated monitored stop which provides for the stop of robot motion when an operator enters the collaborative workspace. Then, only when the operator leaves the zone, the robotic task can automatically resume. Hand guiding method takes into account the operator that is able to fully control the robot motion by direct physical interaction. Hence, the operator can guide manually the robotic task, simply by moving the robotic arm by mean of a tool located at or near the end-effector. The operator can enter in the collaborative working zone only once the robot has achieved a safety-rated monitored stop condition. For the speed and separation monitoring method, the speed and distance among human and robots must be continuously monitored by means of a control system. Thus, the robot is able to dynamically maintain a correct combination of speed and distance in order to avoid the possibility of any hazardous motion which may be the cause for unexpected contacts.
The last one is
power and force limiting in which the biomechanical risk of unexpected human–robot contacts is sufficiently reduced either through inherently safe means in the robot or through a safety-related control system [
35].
Since the case study here-in presented falls within the speed and separation monitoring context, some additional information is provided below.
In particular, the protective separation distance (Sp), defined in Equation (1), is a function f(.) of:
the robot-system reaction time (Tr): the time required for detecting the operator, elaborating the signal and activating the stop;
the stopping time of the robot (Ts): the time among the start of stop signal and the instant in which the robot halts;
the speed of the human worker in direction of the robot’s moving tool (Vh);
the speed of robot in course of stopping (Vs): the time between the stop signal activation and the real stopping instant;
the intrusion distance (C): the distance that a part of the body can intrude into the sensing area of the robot before it is detected;
the position uncertainty of the operator in the shared workspace (Zd) and the position uncertainty of the robot system (Zr):
Thus, while the ISO 10218 describes in general terms the 4 types of collaborative operations, ISO 15066 adds new information to improve the design criteria of a collaborative system. Although not normative, the technical specification accurately describes the state of the art of safety of collaborative actions and provides specific guidance for risk assessment. ISO 10218, which focuses on industrial robots in general, leaves room for ISO/TS 15066, which focuses on collaborative robots and the definition of requirements to ensure the safety of production operators interacting with robotic systems. A further step forward is the presence of data on injury levels through the identification of pain thresholds in the different parts of the body in contact with the robot and the related force and pressure levels that lead to the improvement of the design of the systems avoiding the exceeding of these thresholds in case of human–robot contact.
3. Methodology
This section proposes the methodology herein used to assess benefits due to the introduction of robots in work cells in which the current job is completely manual. The procedure is generally applicable, and it is represented in
Figure 1.
The procedure consists of three main steps, each one composed by others sub-steps.
The first step concerns the evaluation of the current job (blue box in
Figure 1), which is manually performed. In particular, the procedure starts by evaluating the methods used to carry out manual tasks and the related working times. This part of the procedure is assessed by an expert analyst by means of traditional techniques used to estimate working times. This first evaluation gives the possibility to identify the parts of the working cycle in which robots can replace humans, preferring high precision tasks.
The second step of the procedure (green box in
Figure 1) aims to redesign the workstation layout and redefine the working cycle, by considering the introduction of robots. In detail, robots are introduced in order to improve the working cycle by reducing working times and increasing the quality of the performed tasks, thus minimizing the probability to produce defective components. In order to achieve these results, a redesign of the working cell as well as a redefinition of the working tasks may be necessary to implement the HRI. Hence, this step requires to take into account the definition of constraints imposed by both working tasks and by Standards regulating the HRI implementation, as described in the previous
Section 2. Thus, the design of the new working cell and the assignment of tasks to human and robots can be achieved only once some parameters (
Tr,
Ts,
Vs,
C, …) and the kind of robots have been defined.
The last step of the procedure (orange box in
Figure 1) is about the assessment of the new work cell and working cycle performance by means of simulation. In order to perform the simulation, the real working environment must be reproduced in a virtual scenario; this implies the implementation of:
parts belonging to the real working station (by means, for instance, of CAD files), such as tools, handling lines, work benches, etc.;
digital human models (DHMs) which reproduce the anthropometric characteristics of the real workers;
digital robots, which reproduce the models of robots that will be used, including the kinematics.
Once the simulation environment has been defined, it is possible to assess the desired performance parameters (such as working times or ergonomics) and to put in evidence eventual critical issues.
4. Case Study
This section focuses on the investigation about HRI application for improving working times and ergonomics of a working process for composite fuselage panel assembly.
The case study derives from a European Clean Sky Horizon 2020 Project, named “Lean robotized AssemBly and cOntrol of composite aeRostructures (LABOR)” that is coordinated by Loccioni and with Leonardo SpA as topic manager. The goal of the project is to redesign a workstation in order to implement a HRI for a working cell currently characterized by manual working tasks. In detail, the new cell provides for the sharing of the same workspace by human and robots. As proposed in the procedure represented in
Figure 1, an investigation was conducted numerically, by means of simulation.
After assessing the method and times of the current manual workstation (Step 1 of the procedure in
Figure 1), the new solution implementing HRI, was designed by all project partners who have shared their knowledge in order to achieve the best possible solution for new work cell creation (Step 2 of the procedure in
Figure 1). Then, the DT of the new HRI cell was created and simulation was used to evaluate its feasibility, considering working times and ergonomics (Step 3 of the procedure in
Figure 1).
The working cycle in the HRI case was redesigned on the base of the manual one, whose characteristics were provided by the project leader company. In order to create the new working cycle for HRI, constraints imposed by ISO 10218 [
31,
32] and ISO/TS 15066 [
30] and the sequence of operations were considered.
It is worth to note that, in the new configuration, the macro assembling operations remain the same, even if reorganized in order to ensure the human–robot coexistence. Because of the confidentiality, sharing of all the assembly cycle subtasks is not allowed; so, in
Table 2, only the macro tasks of the assembly cycle, named Before HRI and After HRI, are described.
As specified in the previous
Section 3, robots are introduced to improve the quality of performed operations. Hence, as shown in
Table 2, drilling, countersinking and riveting operations are performed on a carbon-fiber-reinforced polymer (CFRP) panel by robots in HRI configuration due to the high precision and quality needed, especially for drilling operations, whose tolerances are very strict. In fact, it has been demonstrated that robots working in specific distance areas (namely best working area) are able to respect very strict tolerances [
36].
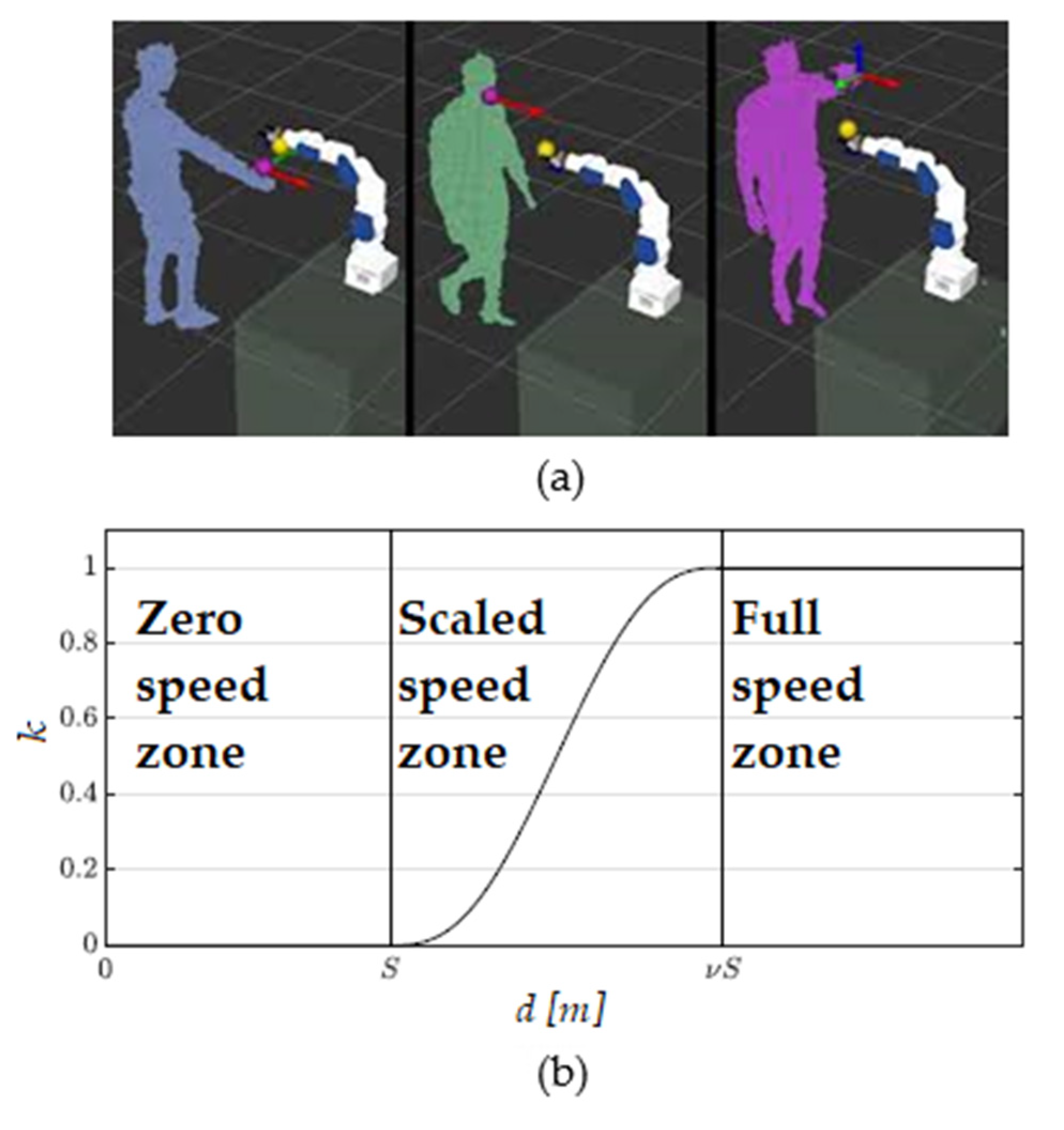
The robots selected by the company are the FANUC M 20iA. To satisfy the requirements of the standard ISO/TS 15066, all the parameters of Equation (1) were considered, assuming
Vh and
Vs as constant, even though the speed modulation system proposed in [
37] is able to optimize these values, relying on a risk analysis performed online through a fuzzy inference system.
Figure 2b shows an example of the end effector normalized speed trend as function of the distance between the robot and the human hands (
Figure 2a) when these last are detected according to the multimodal system proposed in [
38]. It is worth to note that the robot has not a 1 or 0 condition of speed, but its speed is modulated according to the distance from the worker and even the minimum separation distance S is adjusted in real time again on the basis of the actual robot and human relative positions and velocities (see [
38] for more details).
As suggested by the Step 2 of the procedure in
Figure 1, also the constraints due to operations precedencies were considered for each working zone and for the whole fuselage panel in order to create a feasible working cycle. The typical sequence performed in assembling a fuselage panel is represented in
Figure 3, where operations code reported in
Table 2 are represented.
OP10 is a preliminary operation, not considered for the analyses in this study. In some areas, the panel is reinforced with aluminum elements (see
Figure 4) and the human carries out working tasks only in these areas. For this reason, in
Figure 3, two paths are represented:
Path 1 is followed when there are not aluminum elements in the working zone and human operations are not required;
Path 2 is followed when aluminum elements, such as stringers or frames, are in the working zone and also human operations are required.
The entire working cycle for HRI was defined by respecting both constraints due to standards and due to operations precedence and it was simulated in order to evaluate the working times for panel assembling and ergonomics issues.
Moreover, according to Step 3 of the procedure in
Figure 1, the 3D CAD models representing the new workstation were implemented for simulation in Tecnomatix Process Simulate by Siemens
® software environment.
Figure 4 represents a generic fuselage panel, for privacy reasons. In figure, a zoom of one of the working sections is represented at the bottom. Here, different working zones are visible, namely yellow and blue to indicate, respectively, the zones where only robots’ operations are needed (path 1 of
Figure 3), and zones where also human operations must be performed (path 2 of
Figure 3). This approach has been used for each section of the panel: robots work in small areas in order to respect tolerances.
Figure 5 shows a schematic configuration of the workstation in which the human and the robot share the same working area. For privacy reason, it is not represented the real station, which is provided with a scaffolding, which allows human to reach far working zones, and one of the two robots moves on a horizontal support. The panel can rotate as well as shown in
Figure 5.
Concerning the worker, a DHM, representing the male P50 of Italian anthropometric database [
40], was set for carrying out manual operations.
5. Results and Discussion
According to Step 1 of the procedure in
Figure 1, the working times of human, in HRI configuration, were estimated relying on the current manual configuration of the workstation. For privacy reasons, it is not possible to report the operations’ times, but it can be useful to know that the assembling operations of the whole fuselage composite panel require about 3 working shifts. The analysis proposed in this study aims to evaluate if the completion time would decrease in HRI configuration. Moreover, a scale factor (SF) will be used in order to show the difference between the two configurations, as described in
Table 2.
In detail, without loss of generality, the working time values (T) reported in this section, is equivalent to the scaled real working time values (RT), according to the following Equation (2):
By applying Equation (2), the working time to assemble the whole panel (Ta) is 15 hours.
For estimating the working times in HRI configuration (Step 2 of procedure in
Figure 1), about humans, several studies assess that in presence of robots, which may have predictable or unpredictable motions [
41], humans are negatively influenced by the presence a robot [
42,
43], so the human working times for each operation have increased in a range between 10%–20% of the estimated time, according to the type of operation. About the robots, KUKA estimated a mean reduction of working times, when a task is performed by a robot, of about 30% with respect to humans’ times [
44].
Consequently, for the tasks performed by robot (namely drilling, countersinking, inspection and riveting), the working times (T
R) values are assumed to be reduced of 30% with respect to the previously estimated working time, according to Equation (3).
Other robots’ operations, such as the referencing of the working zone, the moving times, the end-effector tool changing times, etc., depend on the robots’ characteristics. On each digital robot the real robot controller was implemented to define the minimum and maximum linear speeds, the joints’ rotation speed and other important parameters.
Two types of cycle were implemented to simulate two different assembling scenarios. The first one cannot be considered as HRI, since the human and robots never work at the same time: when human is performing a task, the robot is passive and vice versa. In the second case, human and robots share the same working zone by respecting the constraints imposed by ISO-TS 15066 and their operations can be performed simultaneously, as shown in
Table 3, representing part of the working cycle where same colors identify operations performed simultaneously.
Simulations were performed considering both simultaneous and separated working tasks.
The working times of
Table 3 consider also the time required for human’s micro-movement, such as walking, raise an arm, grasp an object, etc., which are implemented in Tecnomatix Process Simulate, based on MTM (method and time measurement) tables.
Results provided by the simulations are shown in
Table 4 where there is a comparison between the different configurations: only manual, human and robot in sequential performing and HRI.
The implementation of robots in the workstation drastically reduces the working time for assembling the whole panel. This time is furtherly reduced in HRI configuration, where the difference with the manual configuration is almost the 50%.
Moreover, other details about HRI configuration are described in
Table 5; both human-worker and robots have downtimes (namely passive time) due to constraints imposed by ISO-TS 15066 and mechanical constraints.
Some considerations may be done from results reported in
Table 4 and
Table 5:
Implementation of robots reduces the total working time for assembling the panel;
Interaction time, i.e., the time during which human and robots work simultaneously, sharing the same working area, is about 13% of the total time. This can be furtherly increased by working-cycle optimization;
Passive time for human is very high, suggesting that one worker may follow the assembling of more than one panel during the whole working shift;
Passive times for robots is due to the separation distance imposed by ISO-TS 15066. They depend on the presence of human in proximity of the robot, according to ISO-TS 15066: These times could be reduced by working-cycle optimization.
Ergonomics Evaluation
The second analysis was carried out to assess ergonomic performance in HRI configuration.
Generally, ergonomic analysis in manufacturing production processes needs to be performed for four main factors, cause of injury due to biomechanical overload: (i) working postures, (ii) manual material handling (MMH), (iii) exerted forces and (iv) repetitive actions. In this case, only the assumed working postures contribute to biomechanical load, since there are no repetitive actions during the work shift, as well as no objects weighting more than three kilograms to handle or lift. About exerted forces, robots perform all drilling and countersinking tasks, which are the only ones for which forces are required. Thus, also exerted forces may be neglected in ergonomic analysis.
Hence, in order to analyze working postures, Ovako Working posture Analyzing Systems (OWAS) method [
45] was used. OWAS method provides risk assessment for whole body by analyzing postures assumed by human workers. It assumes four risk classes, identified by four different weights, namely 1, 2, 3, 4.
In particular, weights for each risk class can be defined as follows:
The final output of the method is the OWAS index, represented in the following Equation (4):
where a, b, c, d are the observation frequencies for each risk class. Observation frequencies may be calculated as the number of observations for each class (
Nk) divided the total number of observations (N):
The final score is between 100 and 400.
Table 6 represents the worker risk exposure based on the OWAS index and suggests possible corrective actions for high risk cases.
Typically, the OWAS procedure also considers the handled weight higher that 10 kg. Since all the tools handled by human have weight less than 10 kg, the mass does not contribute to the OWAS index.
Another important factor affecting the accuracy of OWAS analysis is the sampling time of DHM movement. In fact, a great advantage of the analysis performed by using a digital reproduction of the real workstation is the possibility to vary the sampling time in order to achieve a good tradeoff between quality of the analysis and computational time. In particular, by decreasing the sampling time, more positions are acquired and analyzed, but the processing time increases and vice versa. In this study, a good compromise was achieved by fixing sampling time at 0.05 seconds (20 Hz frequency). The processing time, considering only human active times, was of about eight hours (already scaled by SF).
Taking into account SF,
Table 7 shows the number of acquisitions falling in each action category and the observations frequency.
OWAS index can be calculated applying Equation (4):
The value of OWAS index falls within the low risk area; hence, there is no need for immediate corrective actions, but if possible, some organizational measures may be taken to improve the workstation. Concerning simulation, an important data are that only 7489 observations belong to action category 2, 3 or 4, corresponding to about six minutes of the human working cycle, highlighting the fact that occurring of musculo–skeletal disorders is very unlikely for this station.
6. Conclusions
In this study, the potential benefits of HRI was investigated for a real aerospace application. In particular, a methodology for redesigning a workstation was introduced and a real case study, in which a composite fuselage panel is assembled by human and robots, was proposed. The safety requirements and constraints imposed by standard ISO 10218 and ISO/TS 15066 were considered. In order to verify the feasibility of the approach, a simulation was carried out to evaluate the performance of the workstation in terms of both working times and ergonomics.
The results show a significant improvement of assembling performances in HRI configuration: in fact, the total assembling time is reduced of 47.6% with respect to the same activity manually performed. Concerning ergonomics, the OWAS index was evaluated and the result demonstrate that HRI allows the human working in extreme safety conditions, in terms of risk of work-related injuries. Unfortunately, it has not been possible to compare the obtained results with those of the OWAS index in the case of manual processing. However, it is presumable that, in this last case, the values are higher, considering the difficulty in reaching the working areas and the application of forces, together with the handling of additional loads, especially in performing drilling operations.
Numeric results validation, by means of comparison with experimental results, is not possible since the physical workstation is still not available. However—as already previously described—the literature demonstrated that numeric models for simulating manual operations provide results in agreement with those ones provided by experimental tests [
11,
12,
13,
14,
15].
Future developments may be focused on the optimization of the sequence of tasks of the working cycle in order to assess the maximum benefits which can be obtained by employing the HRI solution. Computational time of the simulation can also be optimized by finding a tradeoff between the number of acquisition needed and the quality of the ergonomic assessment.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}