Optical Fibres for Condition Monitoring of Railway Infrastructure—Encouraging Data Source or Errant Effort?


Abstract
:
1. Introduction
2. Optical Fibres—A Brief Overview
2.1. Fibre Bragg Grating
2.2. Distributed Fibre Optical Sensing (DFOS)
- operating range—total length of an optical fibre that can be monitored by the interrogator unit.
- gauge length—the length a measurement is made over.
- spatial resolution—the segment length along the fibre that can be measured as an output (later referred to as a channel).
- sampling rate—numbers of samples obtained per seconds.
3. Materials and Methods
4. Measurements and Results
4.1. Signal Pattern and Properties of Randomly Chosen Channels (Location)
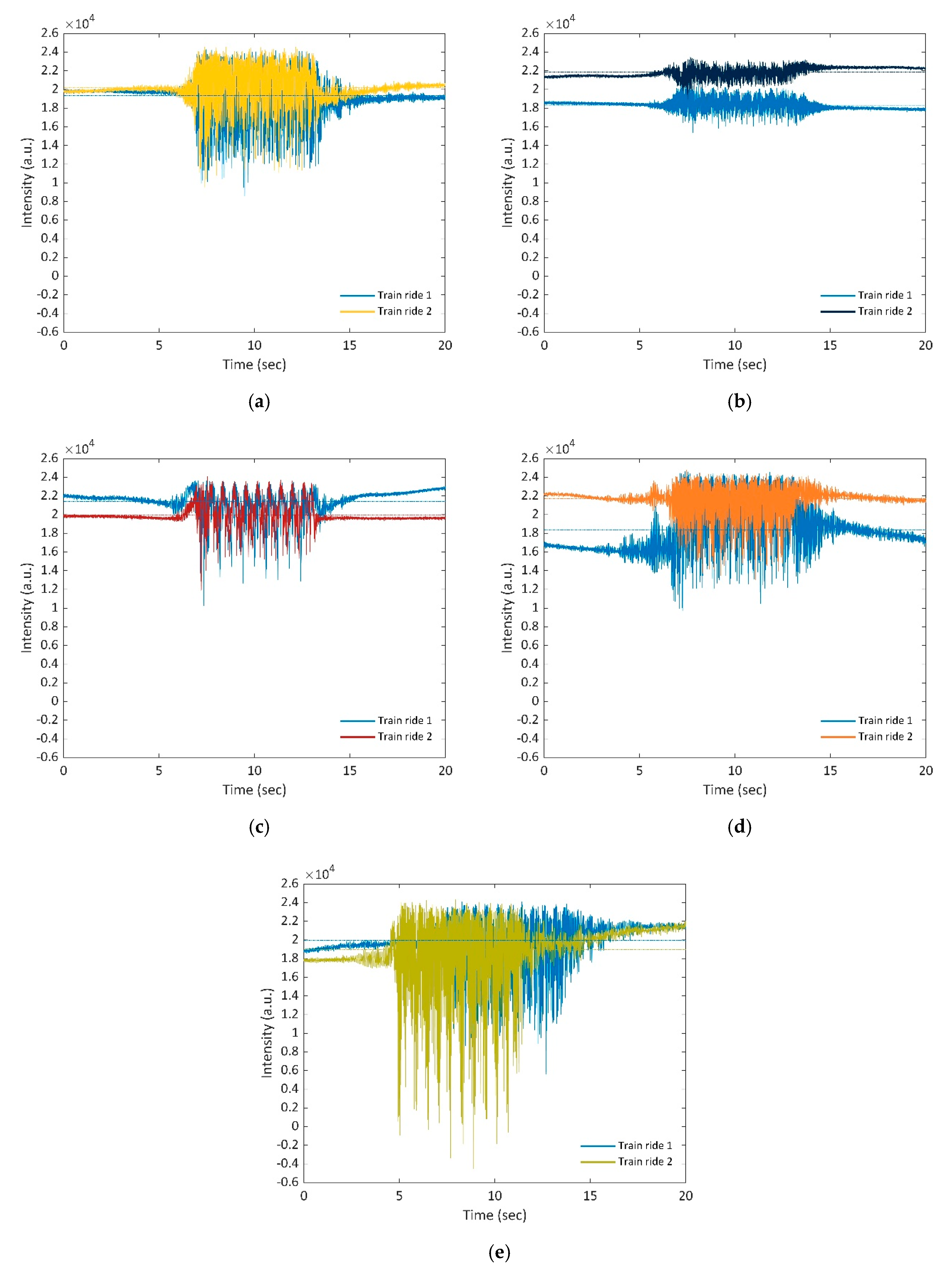
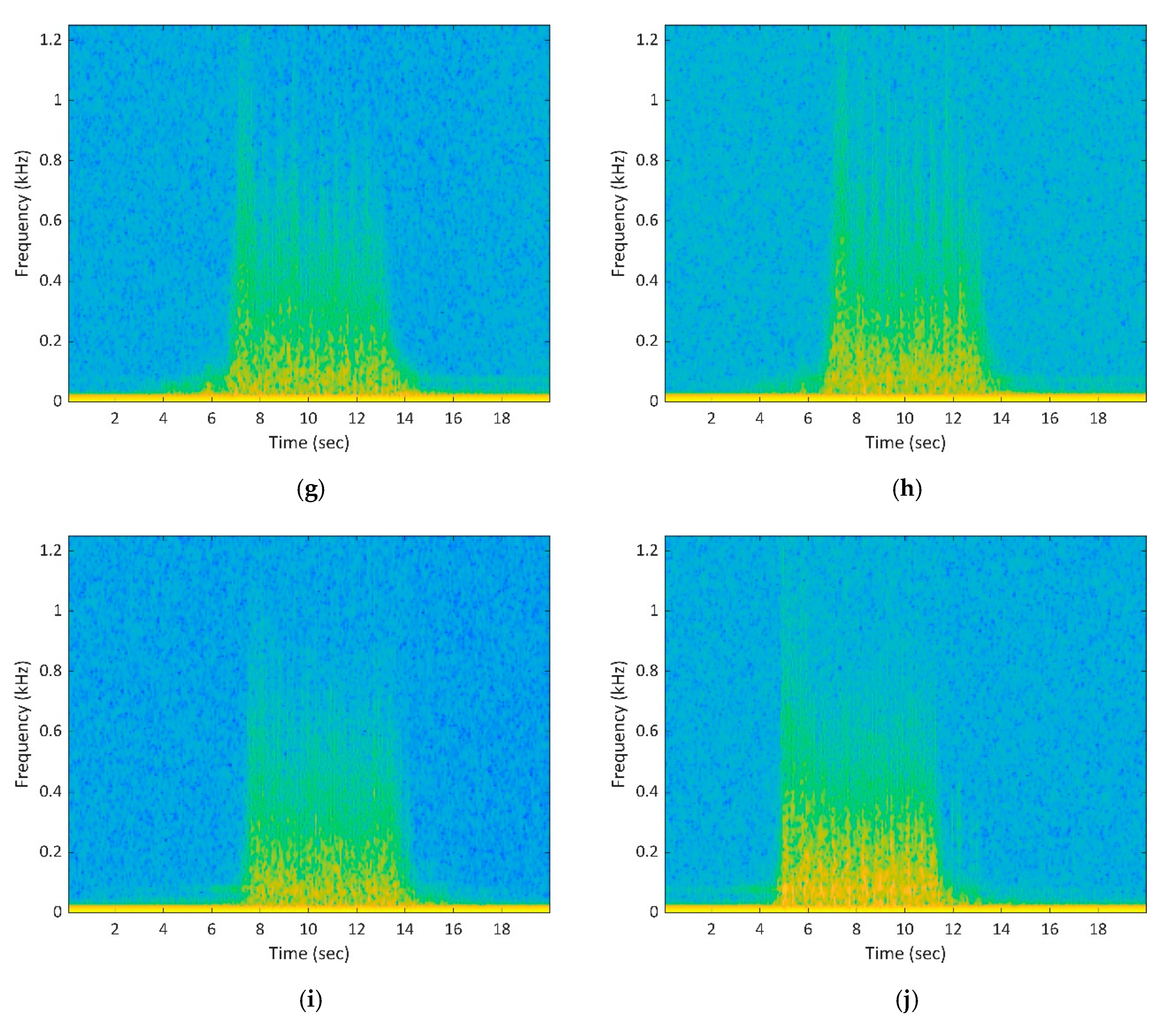
4.2. Signal Pattern and Properties of Two Trains in the Same Composition at the Same Channels (Location)
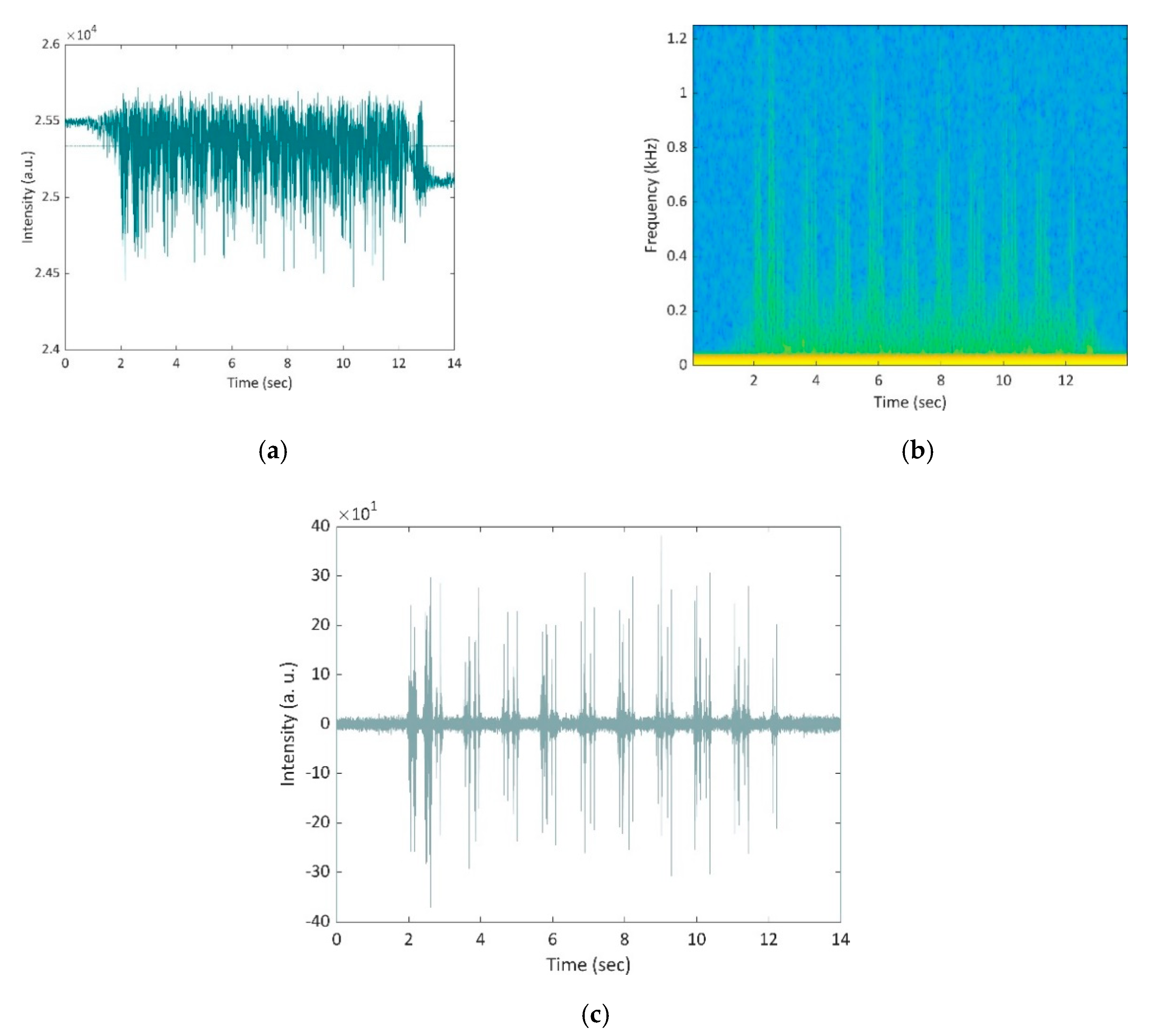
4.3. Signal Pattern and Properties When a Train Passes an Insulated Rail Joint in an Advanced State of Wear
5. Conclusions and Discussion
- Infrastructure condition.
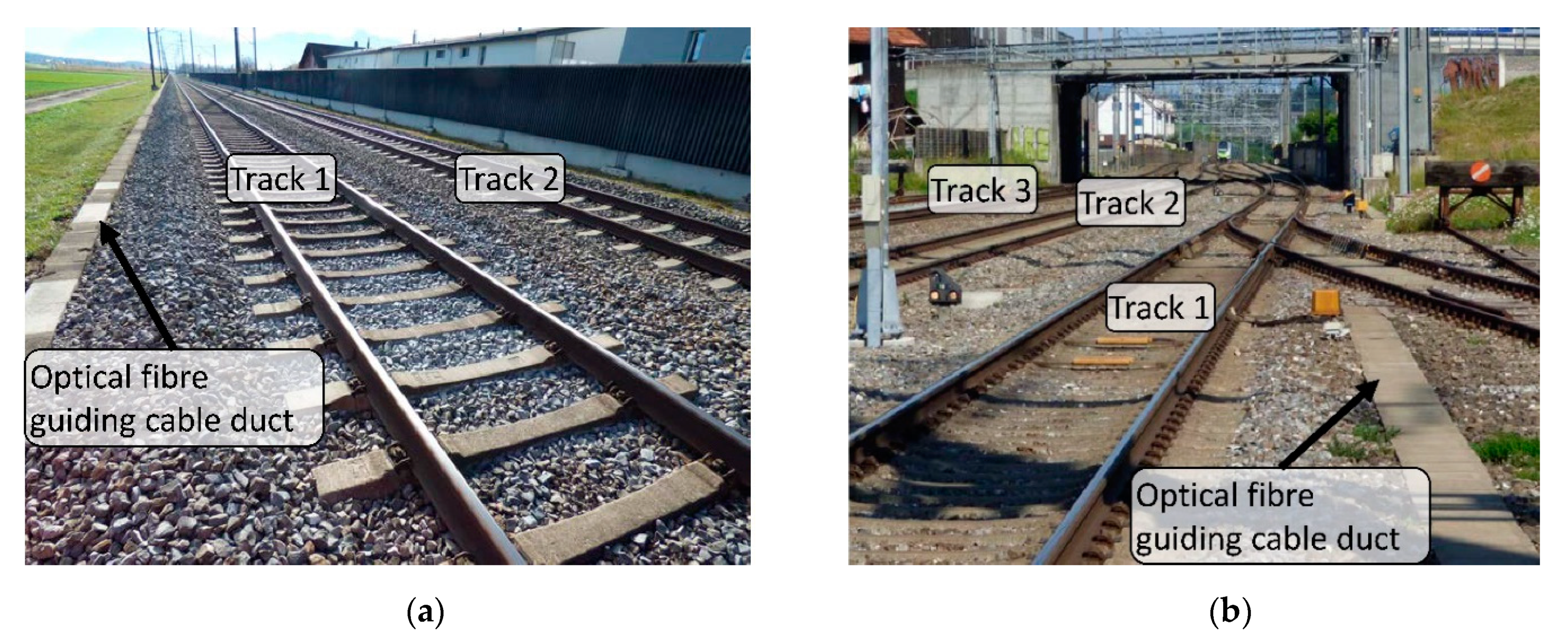
- Location, position and fixation of optical fibre cable.
- Properties of optical fibre cable.
- Train condition/properties.
- Random effects.
- Sensing properties.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Marschnig, S.; Veit, P.; Girsch, G.; Eichberger, P. LCC-optimised permanent way strategies for track and turnout components. ZEVrail 2006, 130, 500–508. [Google Scholar]
- Auer, F. Multi-function Track Recording Cars. Available online: https://www.plasser.com.br/fileadmin/user_upload/Mediathek/Publikationen/32_36_Auer.pdf (accessed on 10 June 2020).
- Yazawa, E.; Takeshita, K. Development of Measurement Device of Track Irregularity using Inertial Mid-chord Offset Method. Q. Rep. RTRI 2002, 43, 125–130. [Google Scholar] [CrossRef] [Green Version]
- Erhard, F.; Wolter, K.U.; Zacher, M. Improvement of track maintenance by continuous monitoring with regularly scheduled high speed trains. In Proceedings of the Railway Engineering–10th International Conference & Exhibition 2009, London, UK, 24–25 June 2009. [Google Scholar]
- McAnaw, H.E. The system that measures the system. NDT E Int. 2003, 36, 169–179. [Google Scholar] [CrossRef]
- Weston, P.F.; Ling, C.S.; Goodman, C.J.; Roberts, C.; Li, P.; Goodall, R.M. Monitoring lateral track irregularity from in-service railway vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2007, 221, 89–100. [Google Scholar] [CrossRef]
- Westeon, P.F.; Ling, C.S.; Roberts, C.; Goodman, C.J.; Li, P.; Goodall, R.M. Monitoring vertical track irregularity from in-service railway vehicles. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2007, 221, 75–88. [Google Scholar] [CrossRef]
- Kassa, E.; Sramota, J.; Kaynia, A. DESTination RAIL—Decision Support Tool for Rail Infrastructure Managers: D1.3 Report on Monitoring Switches and Crossings. 2017. Available online: https://cordis.europa.eu/project/id/284995 (accessed on 10 June 2020).
- Loendersloot, R.; Mostafa, N. DESTination RAIL—Decision Support Tool for Rail Infrastructure Managers: D1.5 Implementation of a Complete Vibration Monitoring System on Irish Rail Bridge. 2018. Available online: https://cordis.europa.eu/project/id/284995 (accessed on 10 June 2020).
- Barke, D.; Chiu, K.W. Structural health monitoring in the railway industry: A review. Struct. Heal. Monit. 2005, 4, 81–94. [Google Scholar] [CrossRef]
- Kantamaa, S.M.V. Wayside train monitoring system—A multitask database for asset owners. Signal Draht 2015, 11, 31–35. [Google Scholar]
- Maiman, T.H. Stimulated optical radiation in Ruby. Nature 1960. [Google Scholar] [CrossRef]
- Kao, K.C.; Hockham, G.A. Dielectric-fibre surface waveguides for optical frequencies. Proc. Inst. Electr. Eng. 1966, 113, 1151–1158. [Google Scholar] [CrossRef] [Green Version]
- Kapron, F.P.; Keck, D.B.; Maurer, R.D. Radiation losses in glass optical waveguides. Appl. Phys. Lett. 1970, 17, 423. [Google Scholar] [CrossRef]
- Udd, E.; Spillman, B., Jr. Fiber Optic Sensors: An Introduction for Engineers and Scientists, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2011; ISBN 978-0-470-12684-4. [Google Scholar]
- Lee, K.Y.; Lee, K.K.; Ho, S.L. Exploration of using FBG sensor for derailment detector. WSEAS Trans. Top. Syst. 2004, 3, 2433–2439. [Google Scholar]
- Lee, K.Y.; Lee, K.K.; Ho, S.L. Exploration of Using FBG Sensor for Axle Counter in Railway Engineering. WSEAS Trans. Top. Syst. 2004, 6, 2440–2447. [Google Scholar]
- Filograno, M.L.; Corredera, P.; Rodriguez-Plaza, M.; Andres-Alguacil, A.; González-Herráez, M. Wheel Flat Detection in High-Speed Railway Systems Using Fiber Bragg Gratings. IEEE Sens. J. 2013, 13, 4808–4816. [Google Scholar] [CrossRef]
- Roveri, N.; Carcaterra, A.; Sestieri, A. Real-time monitoring of railway infrastructures using fibre Bragg grating sensors. Mech. Syst. Signal Process. 2015, 60–61, 14–28. [Google Scholar] [CrossRef]
- Mennella, F.; Laudati, A.; Esposito, M.; Cusano, A.; Cutolo, A.; Giordano, M.; Campopiano, S.; Breglio, G. Railway monitoring and train tracking by fiber Bragg grating sensors. In Proceedings of the Third European Workshop on Optical Fibre Sensors, Napoli, Italy, 4–6 July 2007; SPIE: Bellingham, WA, USA, 2007; Volume 6619, p. 66193H. [Google Scholar] [CrossRef]
- Mi, Q.; Gao, X.; Zhu, H.; Wang, Z.; Zhao, Q. Composite railway health monitoring system based on fiber optic bragg grating sensing array. In Proceedings of the 2014 IEEE Far East Forum on Nondestructive Evaluation/Testing, Chengdu, China, 20–23 June 2014; pp. 259–264. [Google Scholar] [CrossRef]
- Kinet, D.; Kouroussis, G.; Dupuy, J.; Moeyaert, V.; Verlinden, O.; Caucheteur, C. Cost-effective FBG interrogation combined with cepstral-based signal processing for railway traffic monitoring. In Proceedings of the Optical Sensing and Detection IV, Brussels, Belgium, 3–7 April 2016. [Google Scholar] [CrossRef]
- Kouroussis, G.; Kinet, D.; Moeyaert, V.; Dupuy, J.; Caucheteur, C. Railway structure monitoring solutions using fibre Bragg grating sensors. Int. J. Rail Transp. 2016, 4, 135–150. [Google Scholar] [CrossRef]
- Wang, P.; Xie, K.; Shao, L.; Yan, L.; Xu, J.; Chen, R. Longitudinal force measurement in continuous welded rail with bi-directional FBG strain sensors. Smart Mater. Struct. 2016, 25, 015019. [Google Scholar] [CrossRef]
- Kang, D.; Kim, D.-H.; Jang, S. Design and Development of Structural Health Monitoring System for Smart Railroad-Gauge-Facility Using FBG Sensors. Exp. Tech. 2012, 38, 39–47. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, F.; Jing, Y.; Li, W. Application of FBG sensing technique for monitoring and early warning system of high-speed railway track conditions. In Proceedings of the 25th International Conference on Optical Fiber Sensors, Jeju, Korea, 24–28 April 2017. [Google Scholar] [CrossRef]
- Hussaini, S.K.K.; Indraratna, B.; Vinod, J.S. Application of optical-fiber bragg grating sensors in monitoring the rail track Deformations. Geotech. Test. J. 2015, 38, 387–396. [Google Scholar] [CrossRef] [Green Version]
- Lai, C.C.; Au, H.Y.; Liu, M.S.Y.; Ho, S.L.; Tam, H.Y. Development of Level Sensors Based on Fiber Bragg Grating for Railway Track Differential Settlement Measurement. IEEE Sens. J. 2016, 16, 6346–6350. [Google Scholar] [CrossRef]
- Buggy, S.J.; James, S.W.; Staines, S.; Carroll, R.; Kitson, P.V.; Farrington, D.; Drewett, L.; Jaiswal, J.; Tatam, R.P. Railway track component condition monitoring using optical fibre Bragg grating sensors. Meas. Sci. Technol. 2016, 27, 055201. [Google Scholar] [CrossRef] [Green Version]
- Scott, R.H.; Banerji, P.; Chikermane, S.; Srinivasan, S.; Basheer, P.A.M.; Surre, F.; Sun, T.; Grattan, K.T.V. Commissioning and evaluation of a fiber-optic sensor system for bridge monitoring. IEEE Sens. J. 2013, 13, 2555–2562. [Google Scholar] [CrossRef] [Green Version]
- Wei, Y.J.; Zhang, J.T.; Zhang, Y.L.; Xi, X.C.; Li, K.; Liu, S.C. Research on evaluation method of the bridge strengthening effect based on fiber optic sensor. Adv. Mater. Res. 2013, 791–793, 1901–1904. [Google Scholar] [CrossRef]
- Bocciolone, M.; Bucca, G.; Collina, A.; Comolli, L. Pantograph–catenary monitoring by means of fibre Bragg grating sensors: Results from tests in an underground line. Mech. Syst. Signal Process. 2013, 41, 226–238. [Google Scholar] [CrossRef]
- Wagner, R.; Maicz, D.; Viel, W.; Saliger, F.; Saliger, C.; Horak, R.; Noack, T. A fibre optic sensor instrumented pantograph as part of a continuous structural health monitoring system for railway overhead lines. In Proceedings of the 7th European Workshop on Structural Health Monitoring, EWSHM 2014-2nd European Conference of the Prognostics and Health Management (PHM) Society, Nantes, France, 8–11 July 2014. [Google Scholar]
- Catalano, A.; Bruno, F.A.; Galliano, C.; Pisco, M.; Persiano, G.V.; Cutolo, A.; Cusano, A. An optical fiber intrusion detection system for railway security. Sens. Actuators A Phys. 2017, 253, 91–100. [Google Scholar] [CrossRef]
- Esposito, F.; Zotti, A.; Palumbo, G.; Zuppolini, S.; Consales, M.; Cutolo, A.; Borriello, A.; Campopiano, S.; Zarrelli, M.; Iadicicco, A. Liquefied petroleum gas monitoring system based on polystyrene coated long period grating. Sensors 2018, 18, 1435. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rogers, A. Distributed optical-fibre sensing. Meas. Sci. Technol. 1999, 10, R75–R99. [Google Scholar] [CrossRef]
- Boyd, R.W. Nonlinear Optics; Academic Press: Cambridge, MA, USA, 2008; ISBN 9780123694706. [Google Scholar]
- Santos, J.L.; Farahi, F. Handbook of Optical Sensors; CRC Press: Boca Raton, FL, USA, 2014; ISBN 9780429193521. [Google Scholar]
- Minardo, A.; Porcaro, G.; Giannetta, D.; Bernini, R.; Zeni, L. Real-time monitoring of railway traffic using slope-assisted Brillouin distributed sensors. Appl. Opt. 2013, 52, 3770–3776. [Google Scholar] [CrossRef] [PubMed]
- Klug, F.; Lackner, S.; Lienhart, W. Monitoring of Railway Deformations Distributed Fiber Optic Sensors. In Proceedings of the 3rd Joint International Symposium on Deformation Monitoring (JISDM), Vienna, Austria, 30 March–1 April 2016; pp. 1–8. [Google Scholar]
- Bao, Y.; Chen, G.; Meng, W.; Tang, F.; Chen, Y. Kilometer-Long Optical Fiber Sensor for Real-Time Railroad Infrastructure Monitoring to Ensure Safe Train Operation. In Proceedings of the 2015 Joint Rail Conference; American Society of Mechanical Engineers, San Jose, CA, USA, 23–26 March 2015. [Google Scholar] [CrossRef]
- Wheeler, L.N.; Pannese, E.; Hoult, N.A.; Take, A.; Le, H. Measurement of distributed dynamic rail strains using a Rayleigh backscatter based fiber optic sensor: Lab and field evaluation. Transp. Geotech. 2018, 14, 70–80. [Google Scholar] [CrossRef]
- Chapeleau, X.; Sedran, T.; Cottineau, L.-M.; Cailliau, J.; Taillade, F.; Gueguen, I.; Henault, J.-M. Study of ballastless track structure monitoring by distributed optical fiber sensors on a real-scale mockup in laboratory. Eng. Struct. 2013, 56, 1751–1757. [Google Scholar] [CrossRef]
- Juarez, J.C.; Maier, E.W.; Choi, K.N.; Taylor, H.F. Distributed fiber optic intrusion sensor system. J. Light. Technol. 2005, 23, 2081–2087. [Google Scholar] [CrossRef]
- Peng, F.; Duan, N.; Rao, Y.J.; Li, J. Real-time position and speed monitoring of trains using phase-sensitive OTDR. IEEE Photonics Technol. Lett. 2014, 26, 2055–2057. [Google Scholar] [CrossRef]
- Lindsey, N.J.; Craig Dawe, T.; Ajo-Franklin, J.B. Illuminating seafloor faults and ocean dynamics with dark fiber distributed acoustic sensing. Science (80-) 2019, 366, 1103–1107. [Google Scholar] [CrossRef] [PubMed]
- Mateeva, A.; Lopez, J.; Mestayer, J.; Wills, P.; Cox, B.; Kiyashchenko, D.; Yang, Z.; Berlang, W.; Detomo, R.; Grandi, S. Distributed acoustic sensing for reservoir monitoring with VSP. Lead. Edge 2013, 32, 1278–1283. [Google Scholar] [CrossRef]
- Wang, Z.; Lu, B.; Zheng, H.; Ye, Q.; Pan, Z.; Cai, H.; Qu, R.; Fang, Z.; Zhao, H. Novel railway-subgrade vibration monitoring technology using phase-sensitive OTDR. In Proceedings of the 25th International Conference on Optical Fiber Sensors, Jeju, Korea, 24–28 April 2017. [Google Scholar] [CrossRef]
- Barnoski, M.K.; Jensen, S.M. Fiber waveguides: A novel technique for investigating attenuation characteristics. Appl. Opt. 1976, 15, 2112–2115. [Google Scholar] [CrossRef] [PubMed]
- Barnoski, M.K.; Rourke, M.D.; Jensen, S.M.; Melville, R.T. Optical time domain reflectometer. Appl. Opt. 1977, 16, 2375. [Google Scholar] [CrossRef] [PubMed]
- Healey, P.; Booth, R.C.; Daymond-John, B.E.; Nayar, B.K. OTDR in single-mode fibre at 1.5 μm using homodyne detection. Electron. Lett. 1984, 20, 360. [Google Scholar] [CrossRef]
- Healey, P.; Malyon, D.J. OTDR in single-mode fibre at 1.5 μm using heterodyne detection. Electron. Lett. 1982, 18, 862. [Google Scholar] [CrossRef]
- Healey, P. Fading in heterodyne OTDR. Electron. Lett. 1984, 20, 30. [Google Scholar] [CrossRef]
- Izumita, H.; Furukawa, S.i.; Koyamada, Y.; Sankawa, I. Fading Noise Reduction in Coherent OTDR. IEEE Photonics Technol. Lett. 1992, 4, 201–203. [Google Scholar] [CrossRef]
- Izumita, H.; Koyamada, Y.; Furukawa, S.; Sankawa, I. Stochastic amplitude fluctuation in coherent OTDR and a new technique for its reduction by stimulating synchronous optical frequency hopping. J. Light. Technol. 1997, 15, 267–278. [Google Scholar] [CrossRef]
- Shimizu, K.; Horiguchi, T.; Koyamada, Y. Characteristics and Reduction of Coherent Fading Noise in Rayleigh Backscattering Measurement for Optical Fibers and Components. J. Light. Technol. 1992, 10, 982–987. [Google Scholar] [CrossRef]
- Lamb, C.; Dakin, J.P. Distributed Fibre Optic Sensor System. UK Patent GB2222247A, 28 February 1990. [Google Scholar]
- Taylor, H.F.; Lee, C.E. Method For Fiber Optic Intrusion Sensing. U.S. Patent 5,194,847, 16 March 1993. [Google Scholar]
- Juškaitis, R.; Mamedov, A.M.; Potapov, V.T.; Shatalin, S.V. Interferometry with Rayleigh backscattering in a single-mode optical fiber. Opt. Lett. 1994, 19, 225. [Google Scholar] [CrossRef] [PubMed]
- Owen, A.; Duckworth, G.; Worsley, J. OptaSense: Fibre Optic Distributed Acoustic Sensing for Border Monitoring. In Proceedings of the 2012 European Intelligence and Security Informatics Conference, Odense, Denmark, 22–24 August 2012; pp. 362–364. [Google Scholar] [CrossRef]
- Duckworth, G.; Owen, A.; Worsley, J.; Stephenson, H. Optasense® distributed acoustic and seismic sensing performance for multi-threat, multi-environment border monitoring. Proc. 2013 Eur. Intell. Secur. Inform. Conf. EISIC 2013, 2013, 273–276. [Google Scholar] [CrossRef]
- Duckworth, G.L.; Ku, E.M. OptaSense distributed acoustic and seismic sensing using COTS fiber optic cables for infrastructure protection and counter terrorism. In Proceedings of the Sensors, and Command, Control, Communications, and Intelligence (C3I) Technologies for Homeland Security and Homeland Defense XII, Baltimore, MD, USA, 29 April–3 May 2013. [Google Scholar] [CrossRef]
- Timofeev, A.V.; Egorov, D.V.; Denisov, V.M. The rail traffic management with usage of C-OTDR monitoring systems. Int. J. Comput. Electr. Autom. Control Inf. Eng. 2015, 9, 1492–1495. [Google Scholar] [CrossRef]
- Timofeev, A. V Monitoring the Railways by Means of C-OTDR Technology. Int. J. Mech. Aerosp. Ind. Mechatron. Eng. 2015, 9, 586–589. [Google Scholar] [CrossRef]
- Brauner, M.; Kogelnig, A.; Koenig, U.; Neunteufel, G.; Schilcher, H. Distributed acoustic monitoring to secure transport infrastructure against natural hazards—Requirements and new developments. In Proceedings of the Interpraevent 2016, Lucerne, Switzerland, 30 May–2 June 2016; pp. 231–238. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Number of Stations | Interrogator Unit | Section Length | Fibre Length | Coils | Delta |
|---|---|---|---|---|---|---|
| Bern Wankdorf–Muensingen | 5 | IU1 | 14,262 m | 14,400 m | 1 | 138 m |
| Muensingen–Spiez | 7 | IU2 | 24,818 m | 27,240 m | 6 | 2422 m |
| Raw Signal | |||||
|---|---|---|---|---|---|
| 300 | 325 | 350 | 375 | 399 | |
| Min (a.u.) | 13,518 | 15,949 | 19,649 | 12,111 | 10,709 |
| Max (a.u.) | 24,915 | 23,556 | 24,561 | 24,473 | 24,768 |
| Mean (a.u.) | 23,281 | 19,283 | 22,411 | 21,465 | 22,791 |
| SD (a.u.) | 474 | 354 | 317 | 796 | 688 |
| Raw Signal | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Train Ride 1 | Train Ride 2 | |||||||||
| 300 | 325 | 350 | 375 | 399 | 300 | 325 | 350 | 375 | 399 | |
| Min (a.u.) | 8546 | 15,346 | 10,245 | 9708 | 5593 | 9521 | 18,949 | 11,869 | 13,022 | −4552 |
| Max (a.u.) | 24,299 | 20,910 | 23,683 | 24,638 | 24,140 | 24,578 | 23,491 | 24,093 | 24,809 | 24,369 |
| Mean (a.u.) | 19,355 | 18,316 | 21,407 | 18,383 | 19,948 | 20,206 | 21,845 | 19,930 | 21,720 | 18,949 |
| SD (a.u.) | 1496 | 509 | 1392 | 2380 | 1898 | 1344 | 525 | 1128 | 1042 | 2835 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vidovic, I.; Marschnig, S. Optical Fibres for Condition Monitoring of Railway Infrastructure—Encouraging Data Source or Errant Effort? Appl. Sci. 2020, 10, 6016. https://doi.org/10.3390/app10176016
Vidovic I, Marschnig S. Optical Fibres for Condition Monitoring of Railway Infrastructure—Encouraging Data Source or Errant Effort? Applied Sciences. 2020; 10(17):6016. https://doi.org/10.3390/app10176016
Chicago/Turabian StyleVidovic, Ivan, and Stefan Marschnig. 2020. "Optical Fibres for Condition Monitoring of Railway Infrastructure—Encouraging Data Source or Errant Effort?" Applied Sciences 10, no. 17: 6016. https://doi.org/10.3390/app10176016