Detection of Adjacent and Non-Adjacent Bar Breakages in Induction Motors Based on Power Spectral Subtraction and Second Order Statistics of Sound Signals

 ,
,  ,
,  and
and 
Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
2.1. Faults Analyzed: Broken Rotor Bars (BRB)
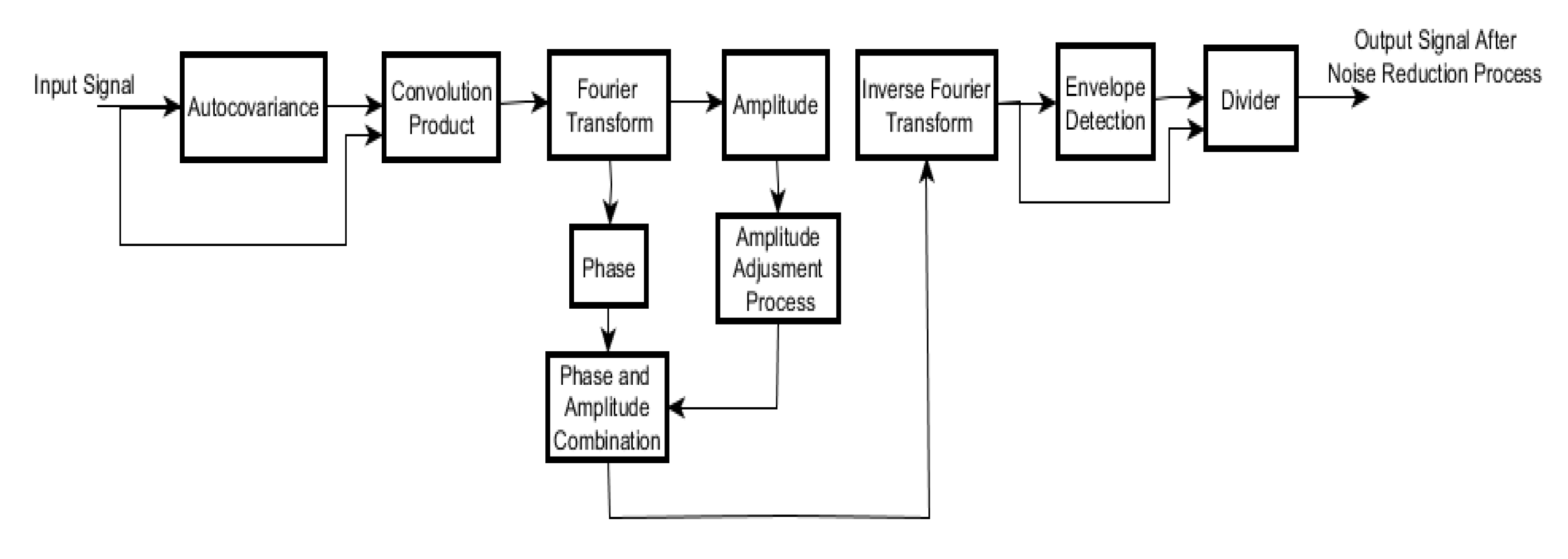
2.2. The Noise-Reduction Algorithm
- We set a filter from the convolution of the signal with its autocovariance. More details about these operations will be shown below and in the recent survey paper of the authors [34].
- The result of the convolution is rescaled in amplitude by a non-linear factor:
- 3.
- We apply an envelope detector to the outcome of the IFT (inverse Fourier transform) from the previous step. This demodulates the signal thanks to the loss of symmetry after the amplitude and phase rescaling.
- 4.
- Finally, the filtered signal is recovered after a division of the result of the envelope detector.
2.3. Convolution-Autocovariance Calculation
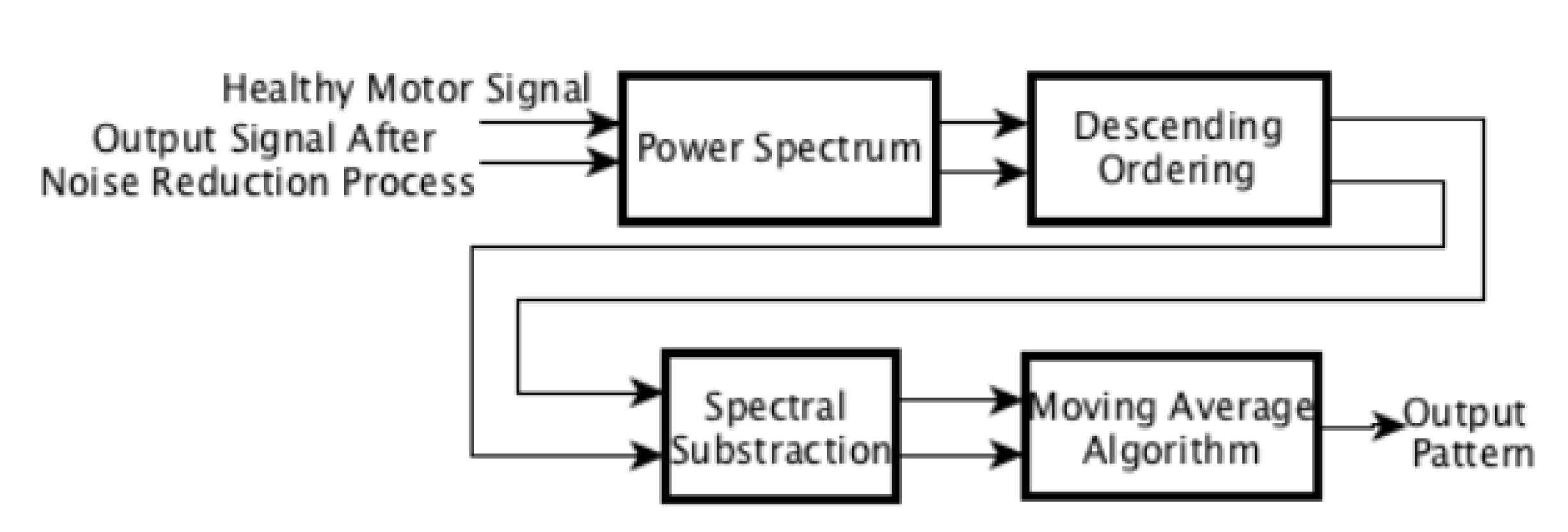
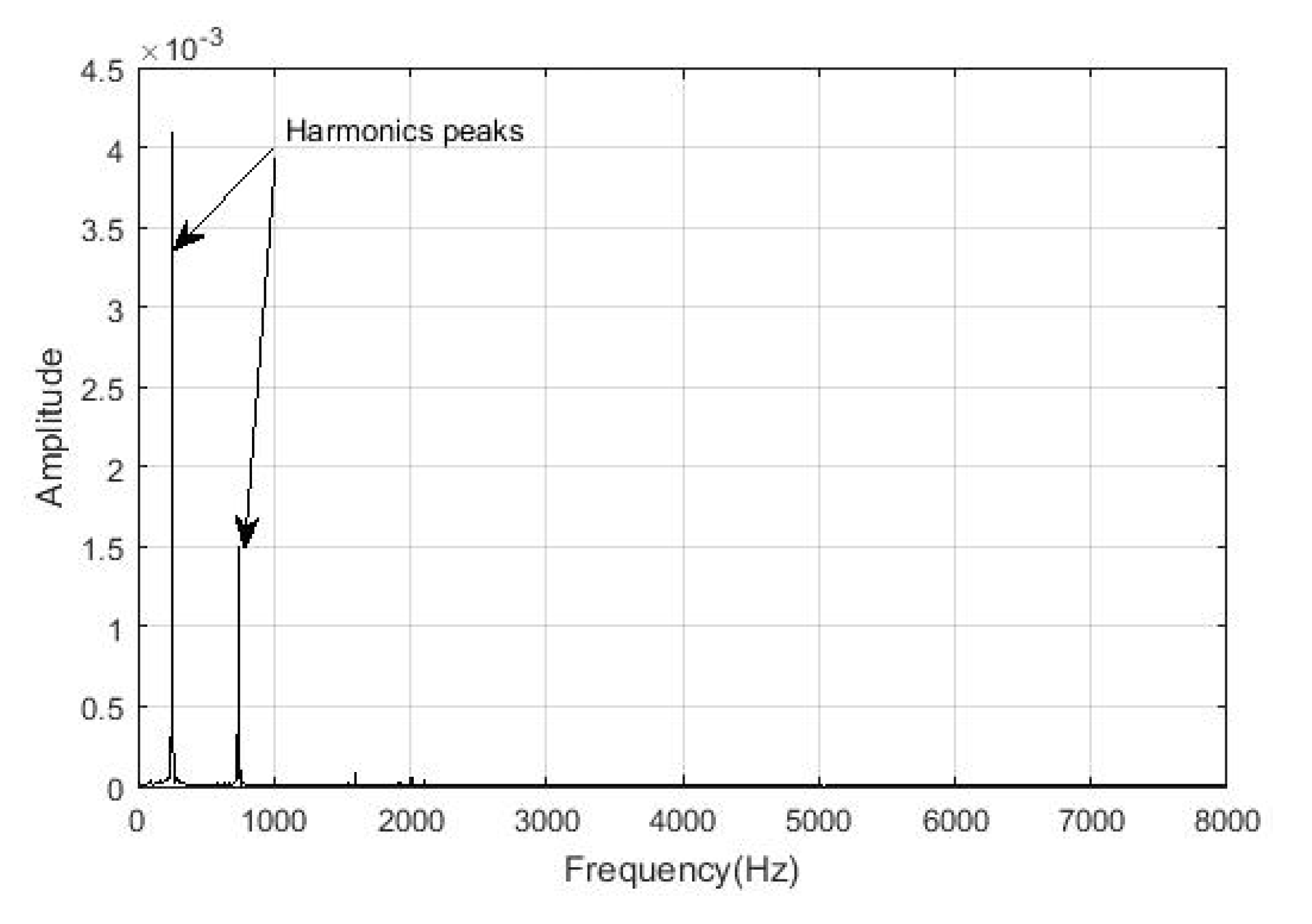
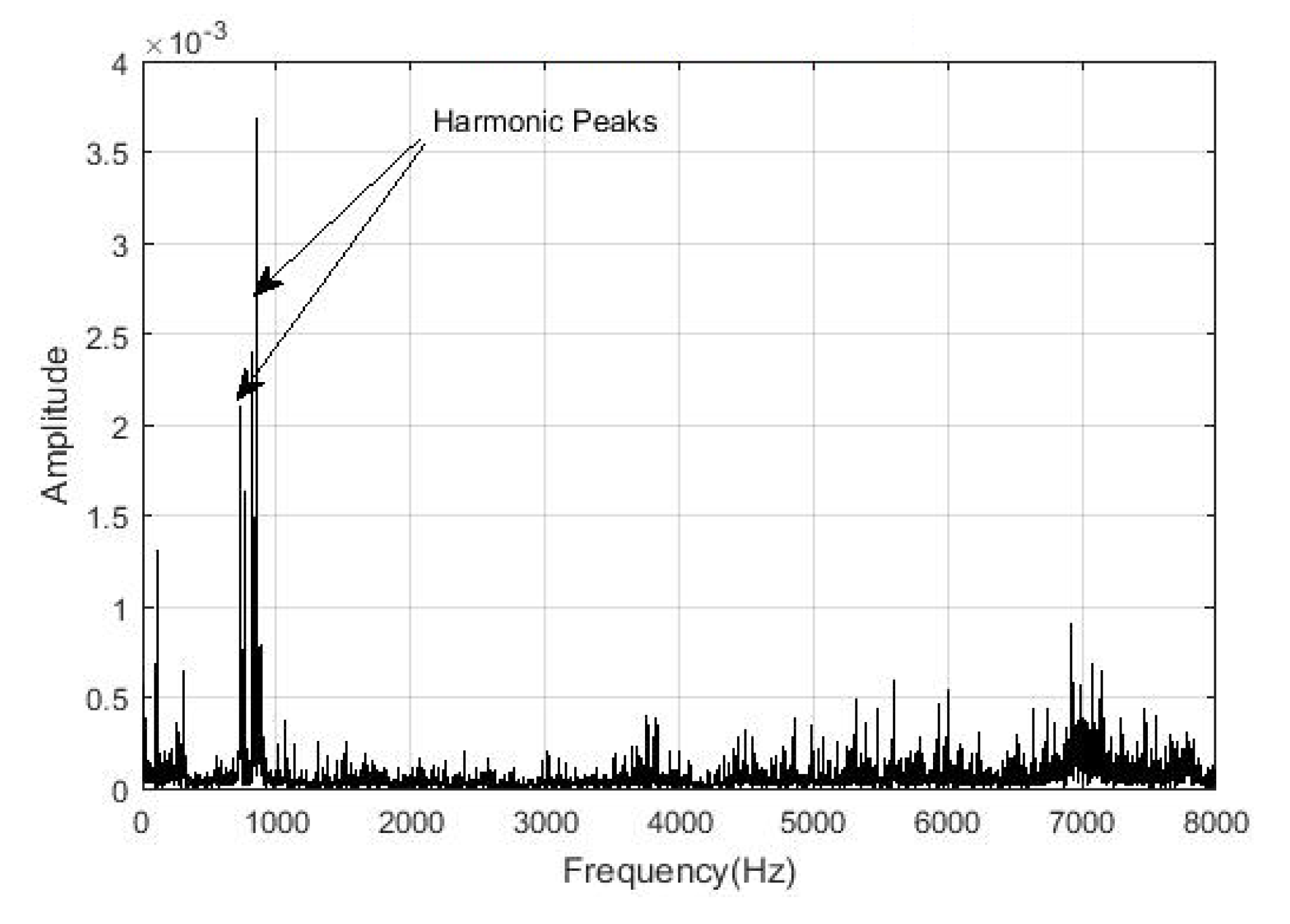
2.4. Spectral Pattern Recognition for Broken Bar Detection
3. Results
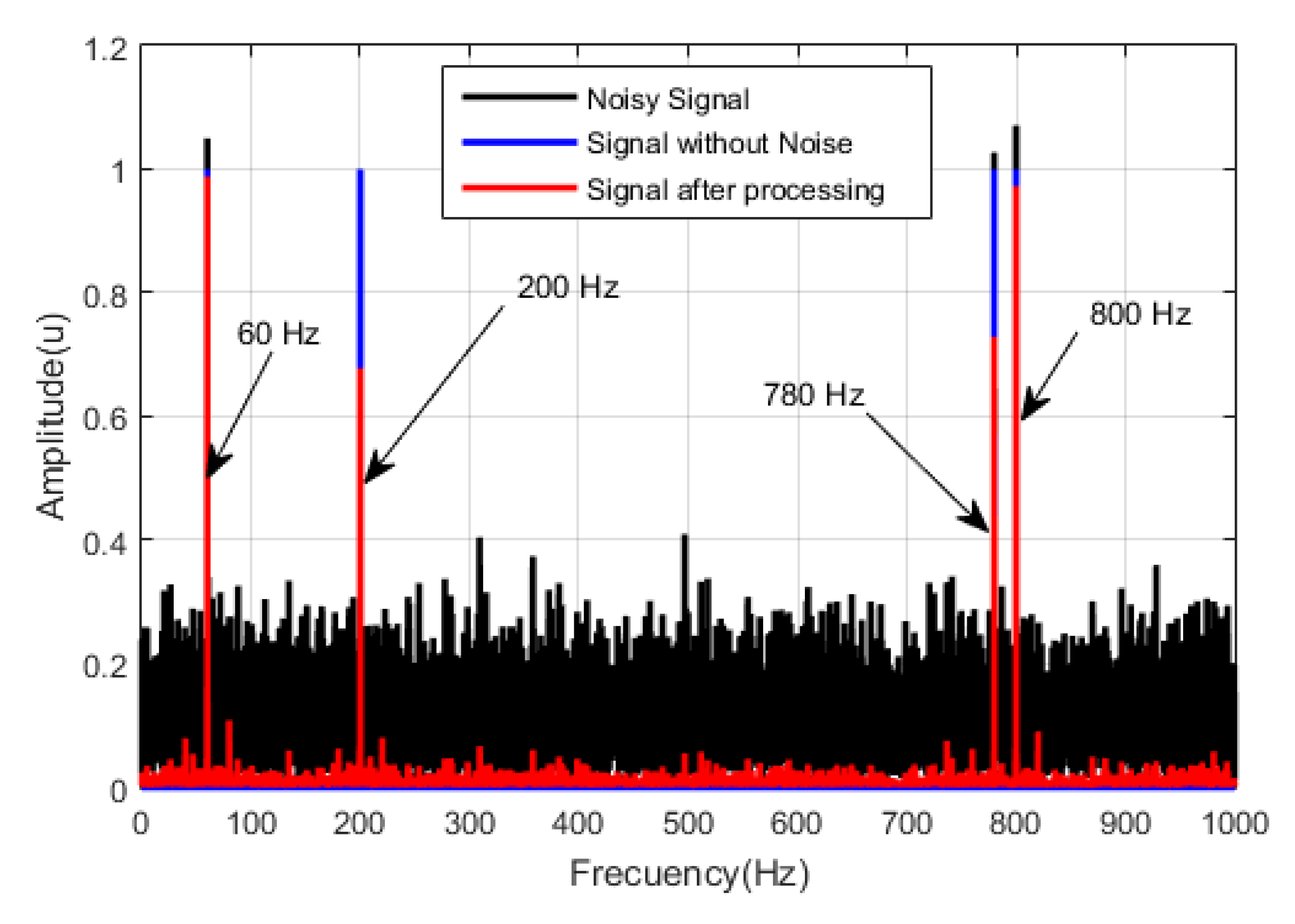
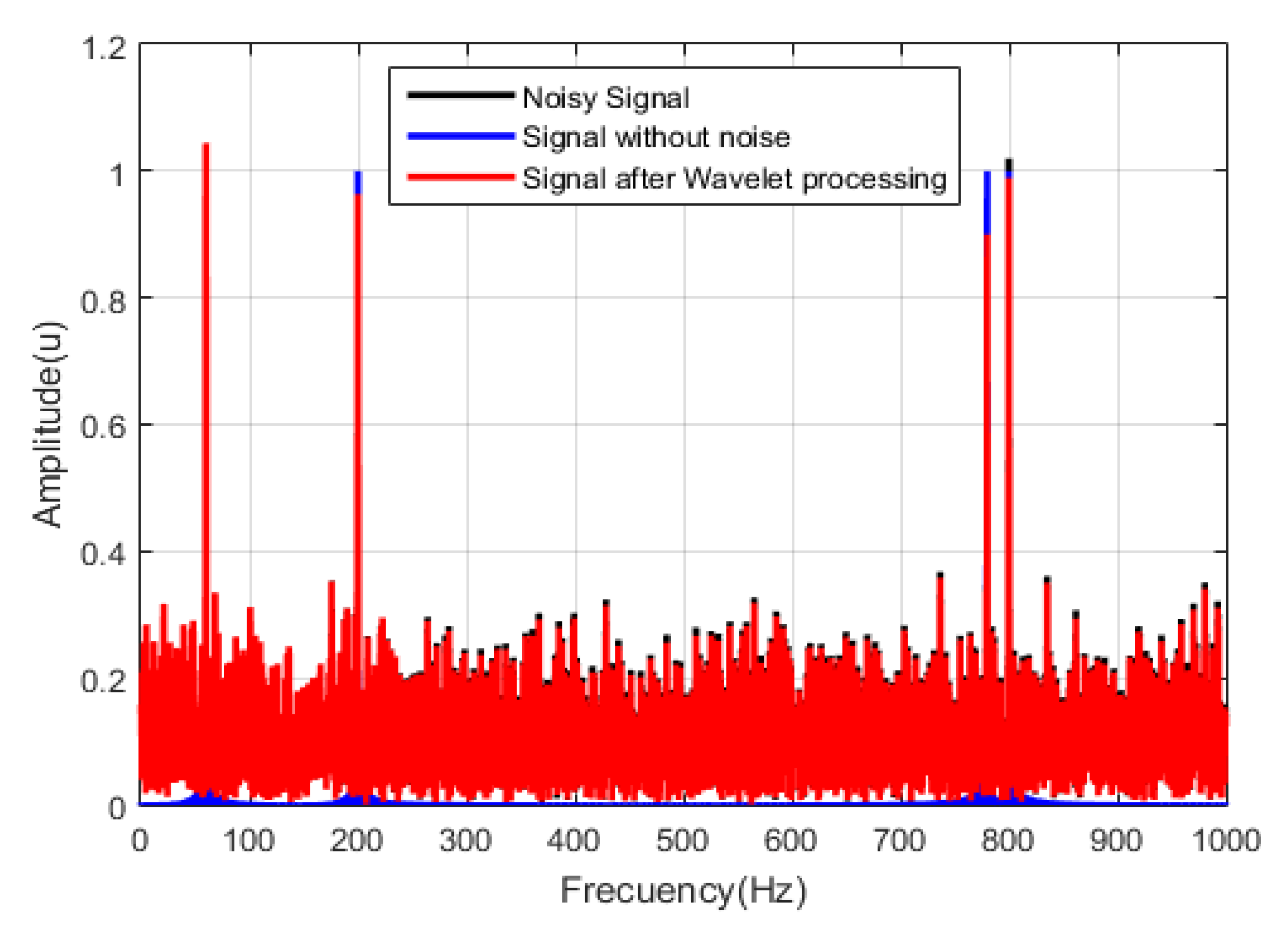
3.1. Comparison and Assessment of the Proposed Noise Reduction Algorithm: Signal-To-Noise Ratio
3.2. Computational Cost
3.3. Failure Detection
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Alsaedi, M.A. Fault diagnosis of three-phase induction motor: A review. Opt. Spec. Issue Appl. Opt. Signal Process. 2015, 4, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Cusidó, J.; Romeral, L.; Ortega, J.A.; Garcia, A.; Riba, J. Signal injection as a fault detection technique. Sensors 2011, 11, 3356–3380. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ghorbanian, V.; Faiz, J. A survey on time and frequency characteristics of induction motors with broken rotor bars in line-start and inverter-fed modes. Mech. Syst. Signal Process. 2015, 54–55, 427–456. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Cabanas, M.F.; Antonino-Daviu, J.A.; Pineda-Sánchez, M.; García, C.H.R. Influence of nonconsecutive bar breakages in motor current signature analysis for the diagnosis of rotor faults in induction motors. IEEE Trans. Energy Convers. 2010, 25, 80–89. [Google Scholar] [CrossRef]
- GüÇlü, S.; Ünsal, A.; Ebeoglu, M.A. Vibration analysis of induction motors with unbalanced loads. Environment 2017, 2, 3. [Google Scholar]
- Glowacz, A.; Glowacz, Z. Diagnosis of the three-phase induction motor using termal imaging. Infrared Phys. Technol. 2017, 81, 7–16. [Google Scholar] [CrossRef]
- Akçay, H.; Germen, E. Subspace-based identification of acoustic noise spectra in induction motors. IEEE Trans. Energy Convers. 2015, 30, 32–40. [Google Scholar] [CrossRef]
- Garcia-Perez, A.; Romero-Troncoso, R.J.; Cabal-Yepez, E.; Osornio-Rios, R.A.; Lucio Martinez, J.A. Application of high-resolution spectral analysis for identifying faults in induction motors by means of sound. J. Vib. Control. 2012, 18, 1585–1594. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, W.; Glowacz, Z.; Kozik, J.; Gutten, M.; Korenciak, D.; Khan, Z.; Irfan, M.; Carletti, E. Fault diagnosis of three phase induction motor using current signal, MSAFRatio15 and selected classifiers. Arch. Metall. Mater. 2017, 62, 2413–2419. [Google Scholar] [CrossRef]
- Guezmil, A.; Berriri, H.; Pusca, R.; Sakly, A.; Romary, R.; Mimouni, M.F. Detecting Inter-Turn Short-Circuit Fault in Induction Machine Using High-Order Sliding Mode Observer: Simulation and Experimental Verification. J. Control. Autom. Electr. Syst. 2017, 28, 532–540. [Google Scholar] [CrossRef]
- Panigrahy, P.S.; Konar, P.; Chattopadhyay, P. Broken bar fault detection using fused dwt-fft in fpga platform. In Proceedings of the 2014 International Conference on Power, Control and Embedded Systems (ICPCES), Allahabad, India, 26–28 December 2014; pp. 1–6. [Google Scholar]
- Zhong, J.-H.; Wong, P.K.; Yang, Z.-X. Simultaneous-fault diagnosis of gearboxes using probabilistic committee machine. Sensors 2016, 16, 185. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Iglesias-Martínez, M.; Antonino-Daviu, J.; Fernández de Córdoba, P.; Conejero, J. Rotor Fault Detection in Induction Motors Based on Time-Frequency Analysis Using the Bispectrum and the Autocovariance of Stray Flux Signals. Energies 2019, 12, 597. [Google Scholar] [CrossRef] [Green Version]
- Glowacz, A.; Glowacz, W.; Glowacz, Z.; Kozik, J. Early fault diagnosis of bearing and stator faults of the single-phase induction motor using acoustic signals. Measurement 2018, 113, 1–9. [Google Scholar] [CrossRef]
- Samanta, A.K.; Naha, A.; Routray, A.; Deb, A.K. Fast and accurate spectral estimation for online detection of partial broken bar in induction motors. Mech. Syst. Signal Process. 2018, 98, 63–77. [Google Scholar] [CrossRef]
- Akçay, H.; Germen, E. Identification of acoustic spectra for fault detection in induction motors. In 2013 AFRICON; IEEE: Piscataway, NJ, USA, 2013; pp. 1–5. [Google Scholar]
- Antonino-Daviu, J.; Riera-Guasp, M.; Roger-Folch, J.; Martínez-Giménez, F.; Peris, A. Application and optimization of the discrete wavelet transform for the detection of broken rotor bars in induction machines. Appl. Comput. Harmon. Anal. 2006, 21, 268–279. [Google Scholar] [CrossRef] [Green Version]
- Bazhenov, V.A.; Pogorelova, O.S.; Postnikova, T.G. Intermittent transition to chaos in vibro impact system. Appl. Math. Nonlinear Sci. 2018, 3, 475–486. [Google Scholar] [CrossRef] [Green Version]
- Gaeid, K.S.; Ping, H.W.; Khalid, M.; Masaoud, A. Sensor and sensorless fault tolerant control for induction motors using a wavelet index. Sensors 2012, 12, 4031–4050. [Google Scholar] [CrossRef]
- Hernandez, J.C.; Antonino-Daviu, J.; Martinez-Gimenez, F.; Peris, A. Comparison of different wavelet families for broken bar detection in induction motors. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 3220–3225. [Google Scholar]
- Yahia, K.; Cardoso, A.; Ghoggal, A.; Zouzou, S. Induction motors airgap-eccentricity detection through the discrete wavelet transform of the apparent power signal under non-stationary operating conditions. ISA Trans. 2014, 53, 603–611. [Google Scholar] [CrossRef]
- Obukhova, N.; Motyko, A.; Pozdeev, A.; Timofeev, B. Review of noise reduction methods and estimation of their effectiveness for medical endoscopic images processing. In Proceedings of the 2018 22nd Conference of Open Innovations Association (FRUCT), Jyvaskyla, Finland, 15–18 May 2018; pp. 204–210. [Google Scholar]
- Delgado-Arredondo, P.A.; Morinigo-Sotelo, D.; Osornio-Rios, R.A.; Avina-Cervantes, J.G.; Rostro-Gonzalez, H.; de Jesus Romero-Troncoso, R. Methodology for fault detection in induction motors via sound and vibration signals. Mech. Syst. Signal Process. 2017, 83, 568–589. [Google Scholar] [CrossRef]
- Alwodai, A. Motor Fault Diagnosis Using Higher Order Statistical Analysis of Motor Power Supply Parameters. Ph.D. Thesis, University of Huddersfield, Huddersfield, UK, 2015. [Google Scholar]
- Gu, F.; Wang, T.; Alwodai, A.; Tian, X.; Shao, Y.; Ball, A. A new method of accurate broken rotor bar diagnosis based on modulation signal bispectrum analysis of motor current signals. Mech. Syst. Signal Process. 2015, 50, 400–413. [Google Scholar] [CrossRef] [Green Version]
- Saidi, L.; Fnaiech, F.; Capolino, G.; Henao, H. Stator current bi-spectrum patterns for induction machines multiple-faults detection. In Proceedings of the 38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 5132–5137. [Google Scholar]
- Saidi, L.; Fnaiech, F.; Henao, H.; Capolino, G.; Cirrincione, G. Diagnosis of broken-bars fault in induction machines using higher order spectral analysis. Isa Trans. 2013, 52, 140–148. [Google Scholar] [CrossRef] [PubMed]
- Glowacz, A.; Glowacz, Z. Recognition of rotor damages in a dc motor using acoustic signals. Bull. Pol. Acad. Sci. Tech. Sci. 2017, 65, 187–194. [Google Scholar] [CrossRef] [Green Version]
- Ondel, O.; Boutleux, E.; Clerc, G. A method to detect broken bars in induction machine using pattern recognition techniques. IEEE Trans. Ind. Appl. 2006, 42, 916–923. [Google Scholar] [CrossRef]
- Júnior, A.M.; Silva, V.V.; Baccarini, L.M.; Mendes, L.F. The design of multiple linear regression models using a genetic algorithm to diagnose initial short-circuit faults in 3-phase induction motors. Appl. Soft Comput. 2018, 63, 50–58. [Google Scholar] [CrossRef]
- Perez-Ramirez, C.A.; Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M.; DominguezGonzalez, A.; Camarena-Martinez, D.; Romero-Troncoso, R.J. Fractal dimension theory-based approach for bearing fault detection in induction motors. In Proceedings of the 2016 IEEE International Autumn Meeting on Power, Electronics Computing (ROPEC), Ixtapa, Mexico, 9–11 November 2016; pp. 1–6. [Google Scholar]
- Rezazadeh Mehrjou, M.; Mariun, N.; Misron, N.; Radzi, M.A.M.; Musa, S. Broken rotor bar detection in LS-PMSM based on startup current analysis using wavelet entropy features. Appl. Sci. 2017, 7, 845. [Google Scholar] [CrossRef] [Green Version]
- Iglesias-Martinez, M.E.; Fernandez de Cordoba, P.; Antonino-Daviu, J.A.; Conejero, J.A. Detection of Nonadjacent Rotor Faults in Induction Motors via Spectral Subtraction and Autocorrelation of Stray Flux Signals. IEEE Trans. Ind. Appl. 2019, 55, 4585–4594. [Google Scholar] [CrossRef]
- Iglesias Martínez, M.E.; Antonino-Daviu, J.A.; de Córdoba, P.F.; Conejero, J.A. Higher-Order Spectral Analysis of Stray Flux Signals for Faults Detection in Induction Motors. Appl. Math. Nonlinear Sci. 2020, 5, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Dhabu, S.; Ambede, A.; Agrawal, N.; Smitha, K.G.; Darak, S.; Vinod, A.P. Variable cutoff frequency FIR filters: A survey. SN Appl. Sci. 2020, 2, 343. [Google Scholar] [CrossRef] [Green Version]
- Dinesh, P.S.; Manikandan, M. Survey on reconfigurable fir filter architecture. In Proceedings of the 2017 Fourth International Conference on Signal Processing, Communication and Networking (ICSCN), Chennai, India, 16–18 March 2017; pp. 1–3. [Google Scholar]
- Salazar-Villanueva, F.; Ibarra-Manzano, O.G. Spectral analysis for identifying faults in induction motors by means of sound. In Proceedings of the International Conference on Electronics, Communications and Computing (CONIELECOMP), Cholula, Mexico, 11–13 March 2013; pp. 149–153. [Google Scholar]
- Benesty, J.; Chen, J.; Huang, Y.; Cohen, I. Noise Reduction in Speech Processing; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009; Volume 2. [Google Scholar]
- Shraddha, C.; Chayadevi, M.L.; Anusuya, M.A. Noise cancellation and noise reduction techniques: A review. In Proceedings of the 1st International Conference on Advances in Information Technology (ICAIT), Chikmagalur, India, 25–27 July 2019; pp. 159–166. [Google Scholar]
- Ono, Y.; Onishi, Y.; Koshinaka, T.; Takata, S.; Hoshuyama, O. Anomaly detection of motors with feature emphasis using only normal sounds. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Vancouver, BC, Canada, 26–31 May 2013; pp. 2800–2804. [Google Scholar]
- Isogawa, K.; Ida, T.; Shiodera, T.; Takeguchi, T. Deep shrinkage convolutional neural network for adaptive noise reduction. IEEE Signal Process. Lett. 2017, 25, 224–228. [Google Scholar] [CrossRef]
- Xiu, C.; Su, X. Composite convolutional neural network for noise deduction. IEEE Access 2019, 7, 117814–117828. [Google Scholar] [CrossRef]
- Crouse, M.S.; Nowak, R.D.; Baraniuk, R.G. Wavelet-based statistical signal processing using hidden Markov models. IEEE Trans. Signal. Process. 1998, 46, 886–902. [Google Scholar] [CrossRef] [Green Version]
- Granda, D.; Aguilar, W.G.; Arcos-Aviles, D.; Sotomayor, D. Broken bar diagnosis for squirrel cage induction motors using frequency analysis based on MCSA and continuous wavelet transform. Math. Comput. Appl. 2017, 22, 30. [Google Scholar]
- Jansen, M. Noise Reduction by Wavelet Thresholding; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 161. [Google Scholar]
- Kimlyk, M.; Umnyashkin, S. Image denoising using discrete wavelet transform and edge information. In Proceedings of the IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (2018 EIConRus), Moscow, Russia, 29 January–1 February 2018; pp. 1823–1825. [Google Scholar]
- Candy, J.V. Bayesian Signal. Processing: Classical, Modern, and Particle Filtering Methods; John Wiley & Sons: Hoboken, NJ, USA, 2016; Volume 54. [Google Scholar]
- Khang, H.; Puche-Panadero, R.; Senanayaka, J.L.; Robbersmyr, K. Bearing fault detection of gear-box drive train using active filters. In Proceedings of the 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 1–6. [Google Scholar]
- Vaseghi, S.V. Advanced Digital Signal Processing and Noise Reduction; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Spagnolini, U. Statistical Signal Processing in Engineering; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Ge, H.; Chen, G.; Yu, H.; Chen, H.; An, F. Theoretical analysis of empirical mode decomposition. Symmetry 2018, 10, 623. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed Algorithm | Competing Method Ref. [23] | |
|---|---|---|
| System characteristic | One Input/One Output | One Input/One Output |
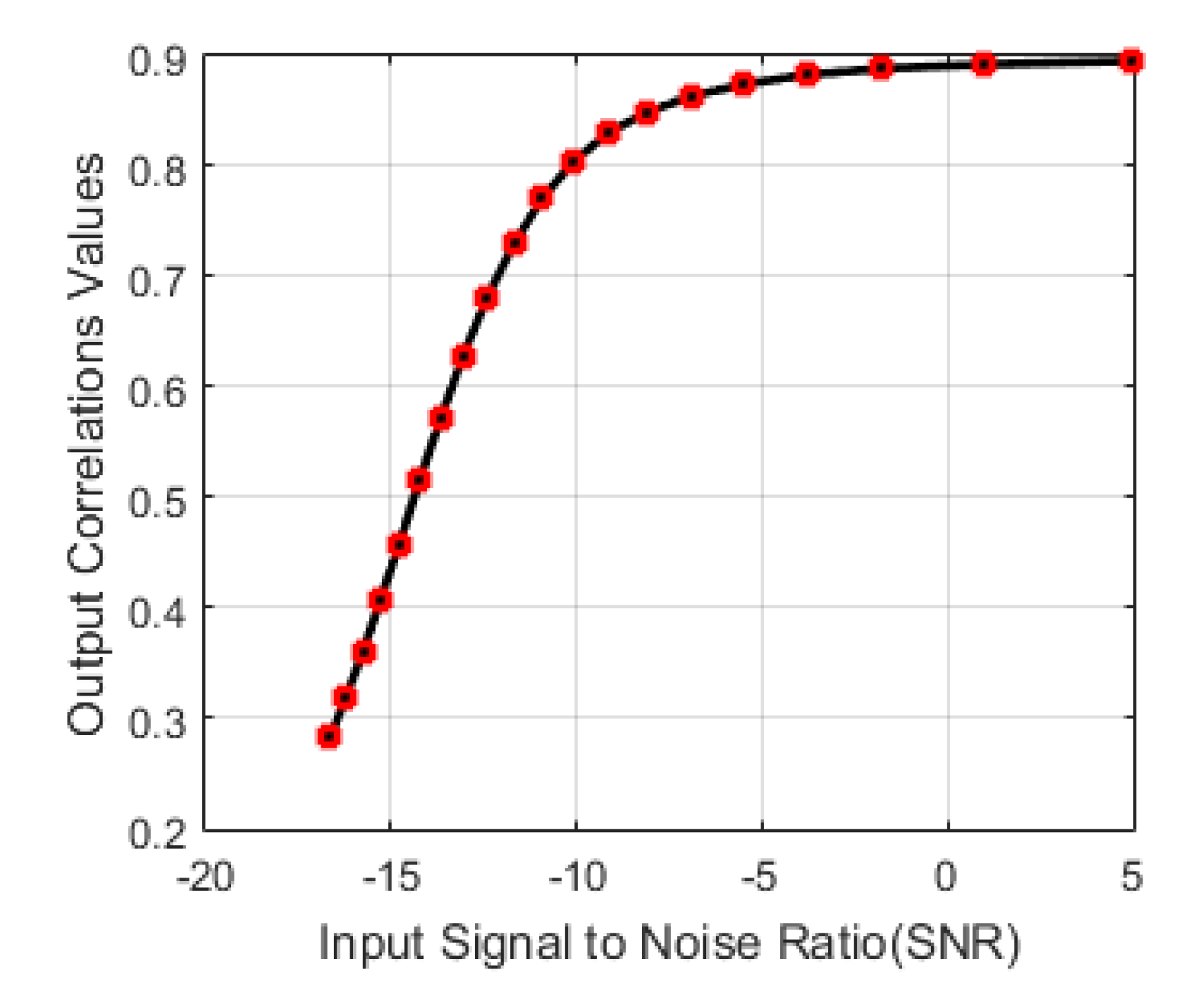
| Signal to Noise Ratio Input | −10.9172 | −10.9172 |
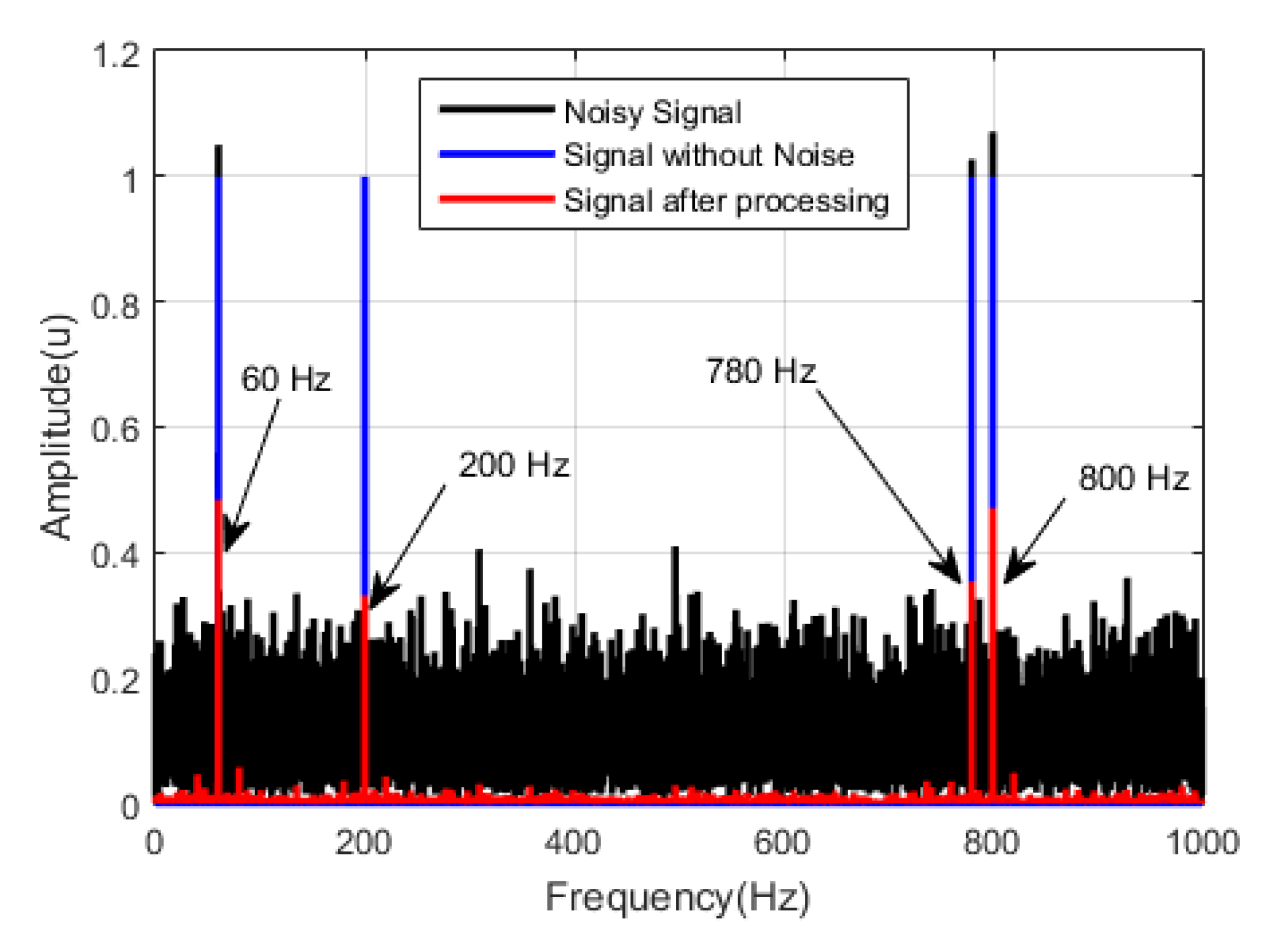
| Input Signal | Harmonic Signal with component (60 Hz, 200 Hz, 780 Hz, and 800 Hz,) | Harmonic Signal with component (60 Hz, 200 Hz, 780 Hz, and 800 Hz,) |
| Signal Decomposition | NO | Yes |
| Proposed Algorithm | Competing Method Based on Wavelet | |
|---|---|---|
| System characteristic | One Input/One Output | One Input/One Output |
| Signal to Noise Ratio Input | −10.9172 | −10.9172 |
| Input Signal | Harmonic Signal with component (60 Hz, 200 Hz, 780 Hz, and 800 Hz,) | Harmonic Signal with component (60 Hz, 200 Hz, 780 Hz, and 800 Hz,) |
| Signal Decomposition | NO | NO |
| Thresholding Calculation | NO | Yes |
| Obtained Correlation | 0.7717. | 0.3303 |
| Signal | Correlation Value |
|---|---|
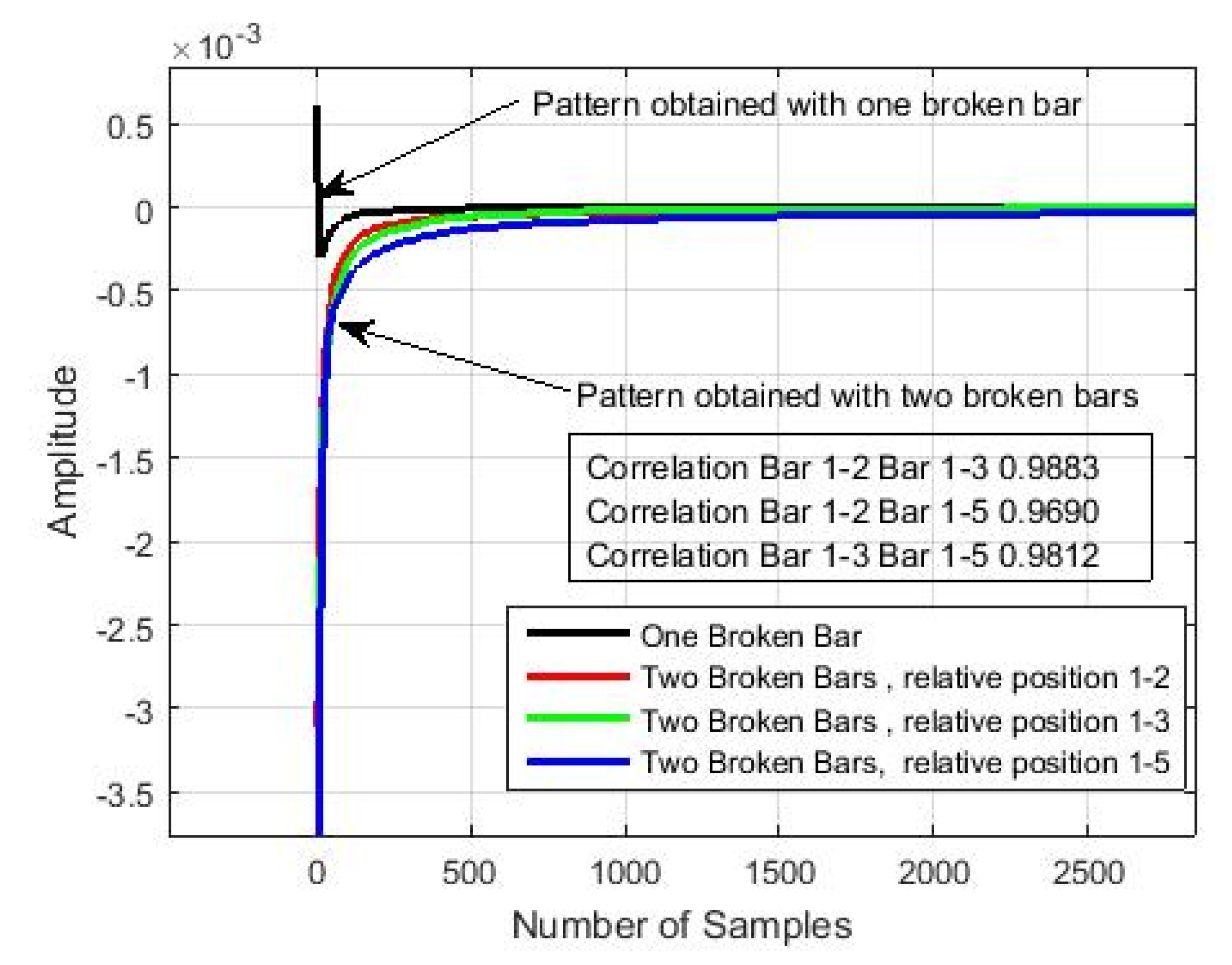
| Bar 1–2 vs. Bar 1–3 | 0.9883 |
| Bar 1–2 vs. Bar 1–5 | 0.9690 |
| Bar 1–2 vs. Bar 1–5 | 0.9812 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iglesias Martínez, M.E.; Fernández de Córdoba, P.; Antonino-Daviu, J.A.; Conejero, J.A. Detection of Adjacent and Non-Adjacent Bar Breakages in Induction Motors Based on Power Spectral Subtraction and Second Order Statistics of Sound Signals. Appl. Sci. 2020, 10, 6641. https://doi.org/10.3390/app10196641
Iglesias Martínez ME, Fernández de Córdoba P, Antonino-Daviu JA, Conejero JA. Detection of Adjacent and Non-Adjacent Bar Breakages in Induction Motors Based on Power Spectral Subtraction and Second Order Statistics of Sound Signals. Applied Sciences. 2020; 10(19):6641. https://doi.org/10.3390/app10196641
Chicago/Turabian StyleIglesias Martínez, Miguel Enrique, Pedro Fernández de Córdoba, Jose Alfonso Antonino-Daviu, and J. Alberto Conejero. 2020. "Detection of Adjacent and Non-Adjacent Bar Breakages in Induction Motors Based on Power Spectral Subtraction and Second Order Statistics of Sound Signals" Applied Sciences 10, no. 19: 6641. https://doi.org/10.3390/app10196641