Soft Underwater Robot Actuated by Shape-Memory Alloys “JellyRobcib” for Path Tracking through Fuzzy Visual Control




Abstract
1. Introduction
2. State-of-the-Art
2.1. Soft Underwater Bioinspired Robots
2.2. Evolution of Projects Developed and Actuation Systems
3. Materials and Methods
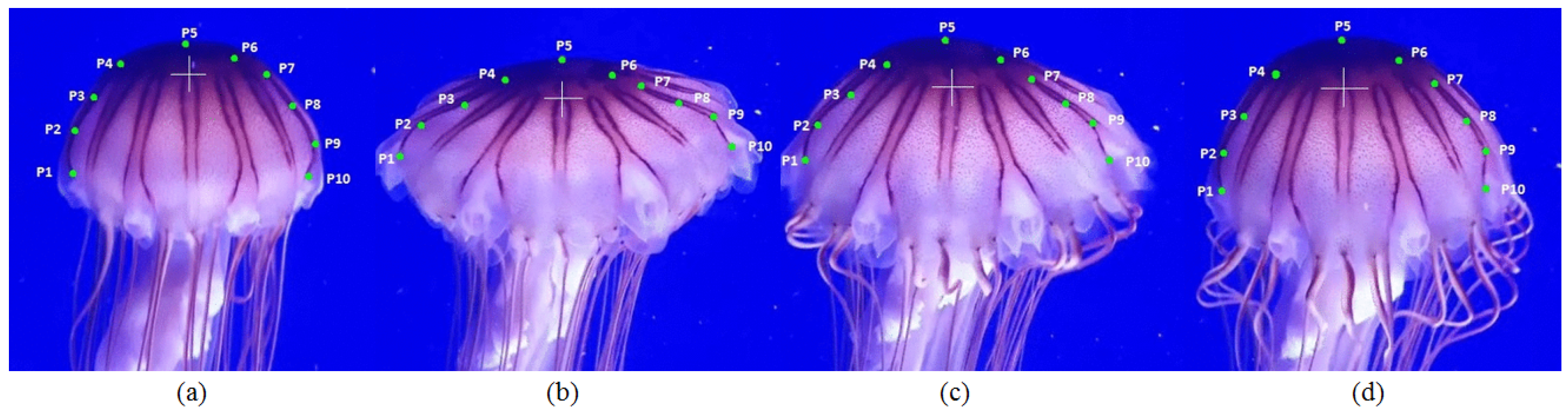
3.1. Design and Implementation of the Jellyfish Body
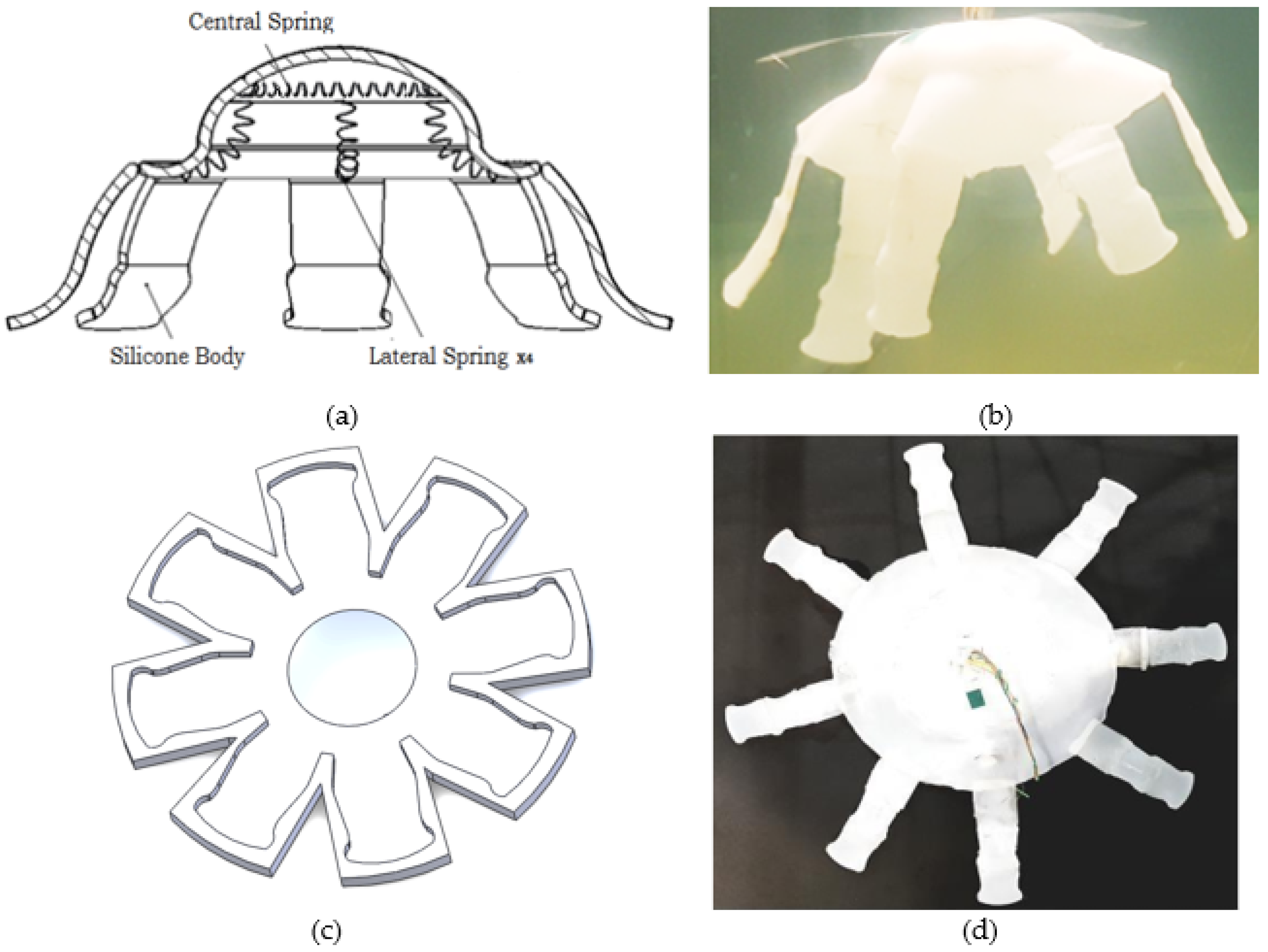
3.2. Computer-Assisted Design (CAD) Model Design and SMA Actuation
3.3. Design and Placement of the Actuators
3.4. Computational Simulation
Material Analysis
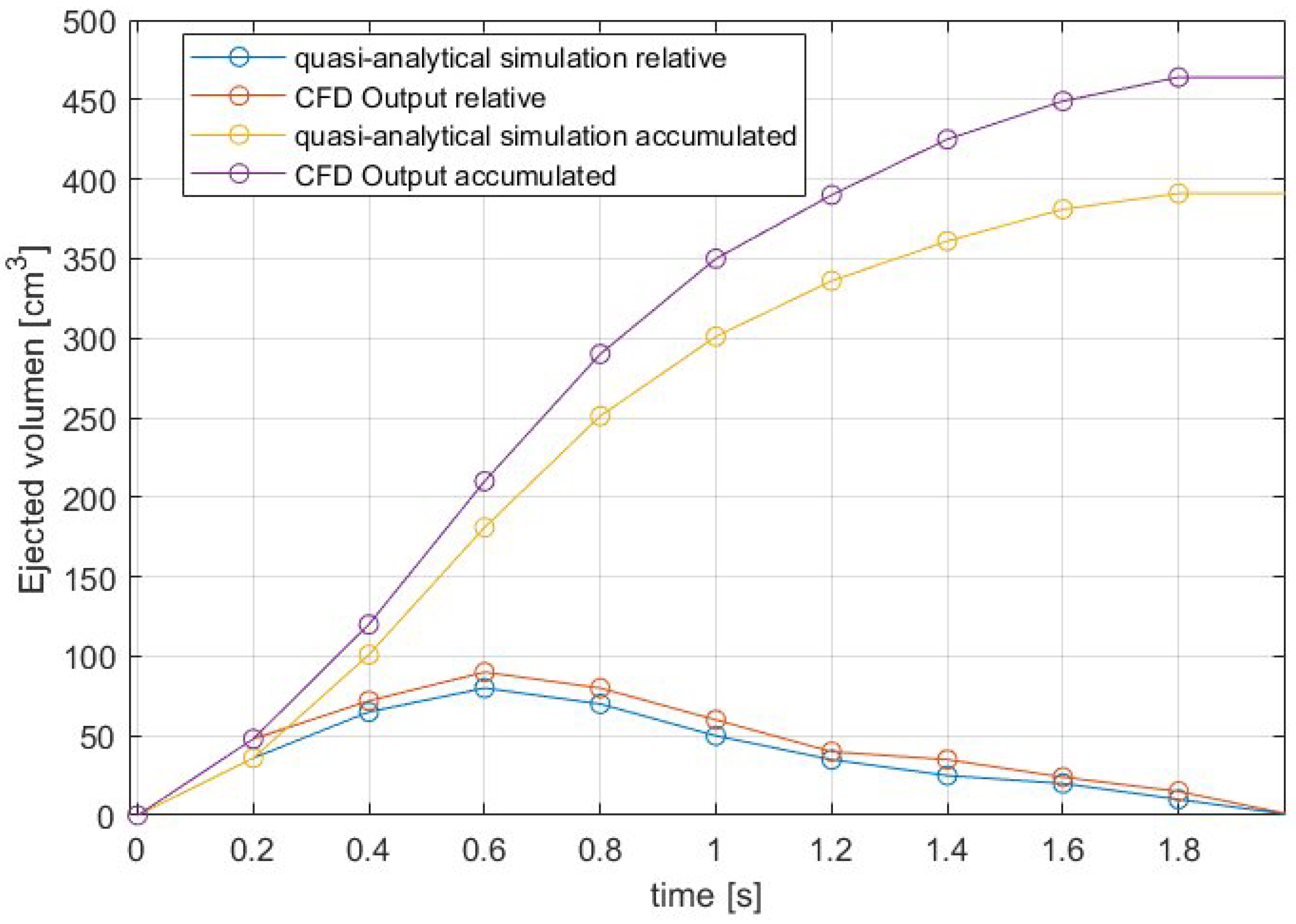
3.5. Computational Fluid Dynamics
4. Results
4.1. Data Acquisition and Control System
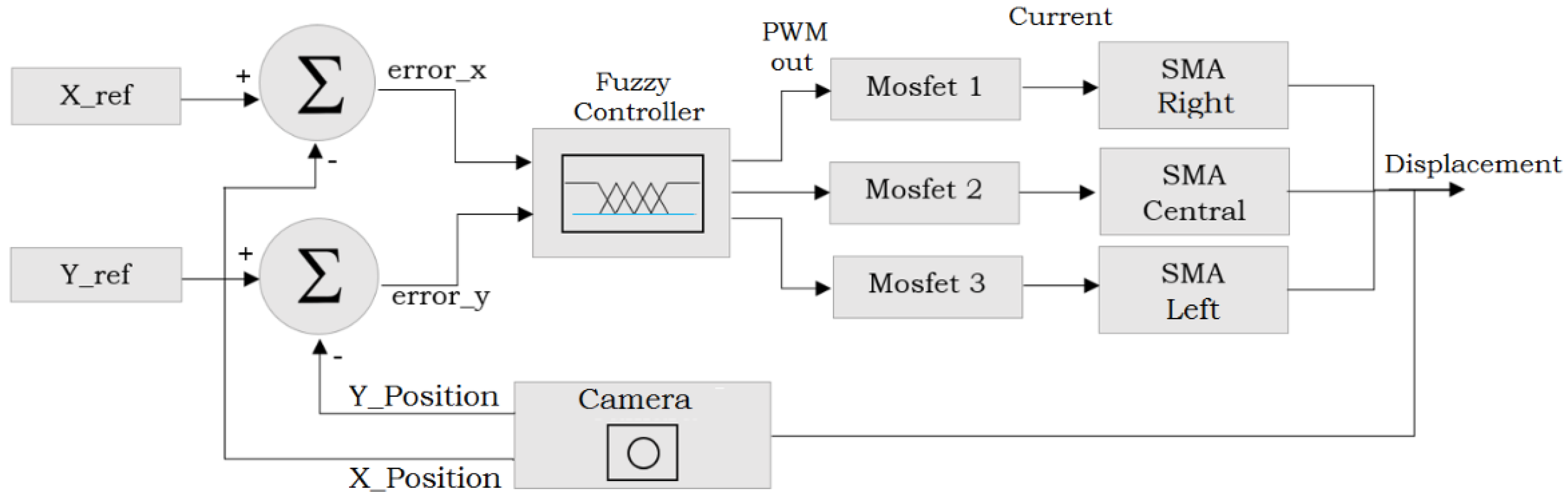
4.2. Monitoring Interface and Fuzzy Control System
4.3. Movement Execution
4.4. Experimental Results
4.5. Thermal Maps Generated through Path Tracking
5. Discussion
5.1. Biomimetic Behavior and Movements
5.2. Analysis of Implemented Controller
5.3. SMAs as Actuators and Results Comparison
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| SMA | Shape-memory alloy |
| CFD | Computational Fluid Dynamics |
| CAD | Design assisted by a computer |
| CAE | Engineering assisted by a computer |
| IPMC | Ionic polymer metal composites |
| ICPF | Conductive ionic polymer film |
| HDPE | High-density polyethylene |
Appendix A
Appendix B
References
- Shan, X.; Bilgen, O. A bioinspired piezocomposite propulsor: An electromechanical model. J. Intell. Mater. Syst. Struct. 2020. [Google Scholar] [CrossRef]
- Quillin, K. Kinematic scaling of locomotion by hydrostatic animals: Ontogeny of peristaltic crawling by the earthworm lumbricus terrestris. J. Exp. Biol. 1999, 202, 661–674. [Google Scholar]
- Menciassi, A.; Gorini, S.; Pernorio, G.; Dario, P. A SMA actuated artificial earthworm. IEEE Int. Conf. Robot. Autom. 2004, 4, 3282–3287. [Google Scholar]
- Seok, S.; Onal, C.D.; Wood, R.; Rus, D.; Kim, S. Peristaltic locomotion with antagonistic actuators in soft robotics. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, Alaska, 4–8 May 2010; pp. 1228–1233. [Google Scholar]
- Lin, H.T.; Leisk, G.G.; Trimmer, B. GoQBot: A caterpillar-inspired soft-bodied rolling robot. Bioinspir. Biomim. 2011, 6, 026007. [Google Scholar] [CrossRef]
- Liu, C.Y.; Liao, W.H. A Snake Robot Using Shape Memory Alloys. In Proceedings of the 2004 IEEE International Conference on Robotics and Biomimetics, Shenyang, China, 22–26 August 2004; pp. 601–605. [Google Scholar]
- Gasoto, R.; Macklin, M.; Liu, X.; Sun, Y.; Erleben, K.; Onal, C.; Fu, J. A Validated Physical Model For Real-Time Simulation of Soft Robotic Snakes. arXiv 2019, arXiv:1904.02833. [Google Scholar]
- Wu, Y.; Yim, J.K.; Liang, J.; Shao, Z.; Qi, M.; Zhong, J.; Luo, Z.; Yan, X.; Zhang, M.; Wang, X.; et al. Insect-scale fast moving and ultrarobust soft robot. Sci. Robot. 2019, 4, eaax1594. [Google Scholar] [CrossRef]
- Colorado, J.; Rossi, C.; Barrientos, A.; Parra, A.; Devia, C.; Patino, D. The Role of Massive Morphing Wings for Maneuvering a Bio-Inspired Bat-Like Robot. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 5534–5539. [Google Scholar] [CrossRef]
- Colorado, J.; Barrientos, A.; Rossi, C.; Bahlman, J.W.; Breuer, K.S. Biomechanics of smart wings in a bat robot: Morphing wings using SMA actuators. Bioinspir. Biomim. 2012, 7, 036006. [Google Scholar] [CrossRef] [PubMed]
- Katzschmann, R.K.; Marchese, A.D.; Rus, D. Hydraulic Autonomous Soft Robotic Fish for 3D Swimming. In Experimental Robotics: The 14th International Symposium on Experimental Robotics; Springer International Publishing: Cham, Swizerland, 2016; pp. 405–420. [Google Scholar] [CrossRef]
- Li, T.; Li, G.; Liang, Y.; Cheng, T.; Dai, J.; Yang, X.; Liu, B.; Zeng, Z.; Huang, Z.; Luo, Y.; et al. Fast-moving soft electronic fish. Sci. Adv. 2017, 3, e1602045. [Google Scholar] [CrossRef]
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef]
- Marchese, A.D.; Onal, C.D.; Rus, D. Autonomous Soft Robotic Fish Capable of Escape Maneuvers Using Fluidic Elastomer Actuators. Soft Robot. 2014, 1, 75–87. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Z.; Hang, G.; Li, J.; Xiao, K. A micro-robot fish with embedded SMA wire actuated flexible biomimetic fin. Sens. Actuators Phys. 2008, 144, 354–360. [Google Scholar] [CrossRef]
- Laschi, C.; Cianchetti, M.; Mazzolai, B.; Margheri, L.; Follador, M.; Dario, P. Soft Robot Arm Inspired by the Octopus. Adv. Robot. 2012, 26, 709–727. [Google Scholar] [CrossRef]
- Nakajima, K.; Hauser, H.; Kang, R.; Guglielmino, E.; Caldwell, D.G.; Pfeifer, R. A soft body as a reservoir: Case studies in a dynamic model of octopus-inspired soft robotic arm. Front. Comput. Neurosci. 2013, 7, 91. [Google Scholar] [CrossRef]
- Cianchetti, M.; Calisti, M.; Margheri, L.; Kuba, M.; Laschi, C. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot. Bioinspir. Biomim. 2015, 10, 035003. [Google Scholar] [CrossRef] [PubMed]
- Yeom, S.W.; Jeon, J.; Kim, H.; Youn, B.D.; Oh, I.K. Bio-Inspired Jellyfish Robots Based on Ionic-Type Artificial Muscles. 2015. Available online: http://www.wseas.us/e-library/conferences/2015/Malaysia/CSCCA/CSCCA-09.pdf (accessed on 12 August 2019).
- Godaba, H.; Li, J.; Wang, Y.; Zhu, J. A Soft Jellyfish Robot Driven by a Dielectric Elastomer Actuator. IEEE Robot. Autom. Lett. 2016, 1, 624–631. [Google Scholar] [CrossRef]
- Nawroth, J.C.; Lee, H.; Feinberg, A.W.; Ripplinger, C.M.; McCain, M.L.; Grosberg, A.; Dabiri, J.O.; Parker, K.K. A tissue-engineered jellyfish with biomimetic propulsion. Nat. Biotechnol. 2012, 30, 792–797. [Google Scholar] [CrossRef]
- Ren, Z.; Hu, W.; Dong, X.; Sitti, M. Multi-functional soft-bodied jellyfish-like swimming. Nat. Commun. 2019, 10, 2703–2712. [Google Scholar] [CrossRef]
- Ishida, M.; Drotman, D.; Shih, B.; Hermes, M.; Luhar, M.; Tolley, M.T. Morphing Structure for Changing Hydrodynamic Characteristics of a Soft Underwater Walking Robot. IEEE Robot. Autom. Lett. 2019, 4, 4163–4169. [Google Scholar] [CrossRef]
- Suzumori, K.; Endo, S.; Kanda, T.; Kato, N.; Suzuki, H. A Bending Pneumatic Rubber Actuator Realizing Soft-bodied Manta Swimming Robot. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 4975–4980. [Google Scholar]
- Shintake, J.; Shea, H.; Floreano, D. Biomimetic underwater robots based on dielectric elastomer actuators. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 4957–4962. [Google Scholar]
- Takagi, K.; Yamamura, M.; Luo, Z.; Onishi, M.; Hirano, S.; Asaka, K.; Hayakawa, Y. Development of a Rajiform Swimming Robot using Ionic Polymer Artificial Muscles. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 1861–1866. [Google Scholar]
- Lee, C.; Kim, M.; Kim, Y.J.; Hong, N.; Ryu, S.; Kim, H.J.; Kim, S. Soft robot review. Int. J. Control. Autom. Syst. 2017, 15, 3–15. [Google Scholar] [CrossRef]
- Renda, F.; Cianchetti, M.; Giorelli, M.; Arienti, A.; Laschi, C. A 3D steady-state model of a tendon-driven continuum soft manipulator inspired by the octopus arm. Bioinspir. Biomim. 2012, 7, 025006. [Google Scholar] [CrossRef]
- Huang, X.; Kumar, K.; Jawed, M.K.; Nasab, A.M.; Ye, Z.; Shan, W.; Majidi, C. Chasing biomimetic locomotion speeds: Creating untethered soft robots with shape memory alloy actuators. Sci. Robot. 2018, 3, eaau7557. [Google Scholar] [CrossRef]
- Jin, H.; Dong, E.; Xu, M.; Liu, C.; Alici, G.; Jie, Y. Soft and smart modular structures actuated by shape memory alloy (SMA) wires as tentacles of soft robots. Smart Mater. Struct. 2016, 25, 085026. [Google Scholar] [CrossRef]
- Mehrpouya, M.; Cheraghi Bidsorkhi, H. MEMS applications of NiTi based shape memory alloys: A review. Micro Nanosyst. 2016, 8, 79–91. [Google Scholar] [CrossRef]
- Bar-Cohen, Y.; Anderson, I.A. Electroactive polymer (EAP) actuators—Background review. Mech. Soft Mater. 2019, 1, 5. [Google Scholar] [CrossRef]
- Yang, Y.; Ye, X.; Guo, S. A New Type of Jellyfish-Like Microrobot. In Proceedings of the 2007 IEEE International Conference on Integration Technology, Shenzhen, China, 20–24 March 2007; pp. 673–678. [Google Scholar]
- Hsieh, W.H.; Chen, T.I. On the resonance analysis for compliant bionic jellyfishes. Sci. China Technol. Sci. 2010, 53, 2976–2982. [Google Scholar] [CrossRef]
- Najem, J.; Akle, B.; Sarles, S.A.; Leo, D.J. Design and Development of a Biomimetic Jellyfish Robot That Features Ionic Polymer Metal Composites Actuators. In Proceedings of the 2011 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Scottsdale, AZ, USA, 18–21 September 2011; Volume 2. [Google Scholar] [CrossRef]
- Villanueva, A.; Smith, C.; Priya, S. A biomimetic robotic jellyfish (Robojelly) actuated by shape memory alloy composite actuators. Bioinspir. Biomim. 2011, 6, 036004. [Google Scholar] [CrossRef]
- Nir, S.; Ruchaevski, I.; Shraga, S.; Shteinberg, T.; Ben Moshe, B. A jellyfish-like robot for mimicking jet propulsion. In Proceedings of the 2012 IEEE 27th Convention of Electrical and Electronics Engineers in Israel, Eilat, Israel, 14–17 November 2012; pp. 1–5. [Google Scholar]
- Frame, J.; Lopez, N.; Curet, O.; Engeberg, E.D. Thrust force characterization of free-swimming soft robotic jellyfish. Bioinspir. Biomim. 2018, 13, 064001. [Google Scholar] [CrossRef] [PubMed]
- Kazemi-Lari, M.A.A.; Dostine, A.D.; Zhang, J.; Wineman, A.S.; Shaw, J.A. Robotic jellyfish actuated with a shape memory alloy spring. In Bioinspiration, Biomimetics, and Bioreplication IX; Martín-Palma, R.J., Knez, M., Lakhtakia, A., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2019; Volume 10965, pp. 1–17. [Google Scholar] [CrossRef]
- Olsen, Z.J.; Kim, K.J. Design and Modeling of a New Biomimetic Soft Robotic Jellyfish Using IPMC-Based Electroactive Polymers. Front. Robot. AI 2019, 6, 112. [Google Scholar] [CrossRef]
- Chen, Z.; Iwasaki, T.; Zhu, L. Feedback Control for Natural Oscillations of Locomotion Systems Under Continuous Interactions With Environment. IEEE Trans. Control Syst. Technol. 2015, 23, 1294–1306. [Google Scholar] [CrossRef]
- Pons, J.L. Emerging Actuator Technologies, 1st ed.; Wiley: Hoboken, NJ, USA, 2005. [Google Scholar]
- Shang, L.; Zhang, W.; Xu, K.; Zhao, Y. Bio-inspired intelligent structural color materials. Mater. Horizons 2019, 6, 945–958. [Google Scholar] [CrossRef]
- Spaggiari, A.; Castagnetti, D.; Golinelli, N.; Dragoni, E.; Mammano, G.S. Smart materials: Properties, design and mechatronic applications. Proc. Inst. Mech. Eng. J. Mater. Des. Appl. 2019, 233, 734–762. [Google Scholar] [CrossRef]
- Mano, T.; Guo, X.; Fujii, N.; Yoshie, N.; Tsutsumi, E.; Saito, R. Moon jellyfish aggregations observed by a scientific echo sounder and an underwater video camera and their relation to internal waves. J. Oceanogr. 2019, 75, 359–374. [Google Scholar] [CrossRef]
- Wiseman, T.P. Engineering Aspects of Shape Memory Alloys; Butterworth-Heinemann: Oxford, UK, 2019; pp. v–vi. [Google Scholar]
- Jani, J.; Huang, S.; Leary, M.; Subic, A. Numerical modeling of shape memory alloy linear actuator. Comput. Mech. 2015, 56, 443–461. [Google Scholar] [CrossRef]
- Wahl, A. Mechanical Springs; McGraw-Hill Education-Europe: London, UK, 1963. [Google Scholar]
- Smooth-On. Ecoflex™ 00-30. Available online: https://www.smooth-on.com/products/ecoflex-00-30/ (accessed on 2 August 2019).
- Dehkordi, P.B.; Azdarpour, A.; Mohammadian, E. The hydrodynamic behavior of high viscous oil-water flow through horizontal pipe undergoing sudden expansion—CFD study and experimental validation. Chem. Eng. Res. Des. 2018, 139, 144–161. [Google Scholar] [CrossRef]
- Colin, S.P.; Costello, J.H. Morphology, swimming performance and propulsive mode of six co-occurring hydromedusae. J. Exp. Biol. 2002, 205, 427. [Google Scholar]
- Giorgio-Serchi, F.; Weymouth, G.D. Underwater Soft Robotics, the Benefit of Body-Shape Variations in Aquatic Propulsion. In Soft Robotics: Trends, Applications and Challenges; Laschi, C., Rossiter, J., Iida, F., Cianchetti, M., Margheri, L., Eds.; Springer International Publishing: Cham, Swizerland, 2017; pp. 37–46. [Google Scholar]
- DANIEL, T.L. Cost of Locomotion: Unsteady Medusan Swimming. J. Exp. Biol. 1985, 119, 149–164. [Google Scholar]
- Daniel, T.L. Unsteady Aspects of Aquatic Locomotion. Am. Zool. 1984, 24, 121–134. [Google Scholar] [CrossRef]
- Batchelor, C.K.; Batchelor, G. An Introduction to Fluid Dynamics; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Rife, J.H.; Rock, S.M. Design and Validation of a Robotic Control Law for Observation of Deep-Ocean Jellyfish. IEEE Trans. Robot. 2006, 22, 282–291. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Actuation | Body Material | Movement | CFD Analysis |
|---|---|---|---|---|
| Micro robot-Jellyfish (2007) [33] | ICPF | Latex-polymer | Vertical | NO |
| Jellyfish biomimetic behavior-Simulation (2010) [34] | Lineal Actuators | HDPE | Vertical | NO |
| Biomimetic jellyfish (2011) [35] | Electrical | IPMC | Vertical | NO |
| Robojelly (2011) [36] | SMA | Flexible Silicon and polystyrene | Vertical | NO |
| Bioinspired jellyfish (2011) [21] | Biosynthetic actuation | Surgical tissue | Vertical | NO |
| Jellyfish-like Robot for mimicking propulsion (2012) [37] | Servomotors | Silicone | Vertical | NO |
| Robotic jellyfish (2015) [19] | Electrical | IPMC | Vertical | NO |
| Pneumatic jellyfish (2016) [20] | Pneumatic | Elastomer | Vertical | NO |
| Robo-jellyfish (2018) [38] | Pneumatic | Silicone RTV | Vertical and Lateral | NO |
| Jellyfish acted by springs (2019) [39] | SMA | Silicone | Vertical | NO |
| Biomimetic Soft Jellyfish (2019) [40] | Electro-active polymers | Silicone Polymer | Vertical | NO |
| Multi-functional soft-bodied jellyfish-like swimming (2019) [22] | External oscillating magnetic field | Magnetic composite elastomer lappets | Vertical and Lateral | NO |
| JellyRobcib | SMA | Silicone | Vertical-Lateral | YES |
| Error “x” | |||||
|---|---|---|---|---|---|
| e-Big | e-Small | z | e+Small | e+Big | |
| Error “y” | |||||
| Distance Traveled [cm] | SMA_L N° CT | SMA_C N° CT | SMA_R N° CT | Time [s] | Peak Speed Medium [cm/s] | Peak Acceleration [cm/s2] | |
|---|---|---|---|---|---|---|---|
| a | 114 | 0 | 14 | 0 | 61.6 | 2.51 | 5.01 |
| a | 116 | 0 | 16 | 0 | 64.8 | 2.53 | 5.20 |
| a | 120 | 0 | 15 | 0 | 68.2 | 2.47 | 5.34 |
| a | 117 | 0 | 15 | 0 | 65.2 | 2.52 | 5.21 |
| b | 91 | 0 | 0 | 15 | 41.4 | 1.28 | 4.86 |
| b | 92 | 0 | 0 | 16 | 43.1 | 1.14 | 4.92 |
| b | 95 | 14 | 0 | 0 | 44.2 | 1.08 | 5.04 |
| b | 93 | 16 | 0 | 0 | 42.4 | 1.35 | 4.89 |
| c | 245 | 4 | 12 | 8 | 142.2 | 2.14 | 6.72 |
| c | 241 | 5 | 13 | 7 | 136.3 | 2.07 | 7.01 |
| c | 239 | 5 | 13 | 8 | 148.2 | 2.10 | 6.82 |
| c | 242 | 4 | 12 | 9 | 139.6 | 2.24 | 6.92 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cruz Ulloa, C.; Terrile, S.; Barrientos, A. Soft Underwater Robot Actuated by Shape-Memory Alloys “JellyRobcib” for Path Tracking through Fuzzy Visual Control. Appl. Sci. 2020, 10, 7160. https://doi.org/10.3390/app10207160
Cruz Ulloa C, Terrile S, Barrientos A. Soft Underwater Robot Actuated by Shape-Memory Alloys “JellyRobcib” for Path Tracking through Fuzzy Visual Control. Applied Sciences. 2020; 10(20):7160. https://doi.org/10.3390/app10207160
Chicago/Turabian StyleCruz Ulloa, Christyan, Silvia Terrile, and Antonio Barrientos. 2020. "Soft Underwater Robot Actuated by Shape-Memory Alloys “JellyRobcib” for Path Tracking through Fuzzy Visual Control" Applied Sciences 10, no. 20: 7160. https://doi.org/10.3390/app10207160
APA StyleCruz Ulloa, C., Terrile, S., & Barrientos, A. (2020). Soft Underwater Robot Actuated by Shape-Memory Alloys “JellyRobcib” for Path Tracking through Fuzzy Visual Control. Applied Sciences, 10(20), 7160. https://doi.org/10.3390/app10207160