1. Introduction
Electrical distribution networks are responsible for transporting energy from power systems to end-users in medium- and low-voltage levels [
1]. These are typically fed by substations that keep voltage and frequency variables as constant as possible, in the case of alternative current (AC) networks, or voltage magnitude, as in the case of a direct current (DC) distribution network [
2]. Due to the use of voltage levels in distribution networks and their lengths (also its radial configurations), these networks have higher power losses as percentages when compared to transmission networks [
1,
3]. Multiple methodologies have been reported to improve the performance of electrical distribution networks in terms of power losses and voltage profiles; some of the classical ones are the following:
- √
The optimal location and sizing of capacitor banks [
4,
5,
6].
- √
The optimal location and sizing of distributed generators [
7,
8]
- √
The optimal grid reconfiguration [
9,
10,
11].
- √
The optimal location of voltage regulators and series capacitor banks [
12,
13,
14].
Note that in the case of DC networks, the most extended approach is the optimal location and sizing of distributed generators. This is the most reported approach in recent scientific literature where DC technologies are gaining more relevance in distribution scenarios [
15]. Some of the main characteristics of the rapid advances in DC distribution are the following: (i) lower power losses and better voltage profiles due to the nonexistence of reactances in distribution lines, and (ii) easy controllability as the concept of frequency does not exist, which implies that controls are only focused on constant voltage support. In addition, multiple distributed energy resources, such as batteries and photovoltaic generators, are typically operated under the DC paradigm, which implies that they are easily integrated into these kinds of grids in contrast to AC networks. This is because a lower power electronic interface is needed to connect them in DC networks, which can reduce costs compared to conventional AC networks [
15].
Based on these advantages of DC grids over AC grids, in this study, we focus on the problem of the optimal locations and sizes of distributed generators in DC distribution networks. This problem has been largely studied with regard to AC distribution networks [
16]. In the case of DC networks, few approaches have been reported in the literature. The authors of [
17] proposed a hybrid approach for the optimal location and sizing of dispatchable distributed generators in DC grids. They combined a semidefinite programming model for an optimal power flow analysis with the hyperplane search method, which relaxes the binary variables. A similar approach based on a sequential quadratic optimal power flow was proposed in [
18]. Both optimization models reached the optimal global solution for this problem system with 21 and 69 node test feeders. However, the complexity in their implementations lies in the number of hyperplanes that were needed to be evaluated, as these depend on the number of candidate nodes provided by the relaxed optima power flow (OPF) model that can significantly increase the total processing time required for the solution of the problem. In [
19], a tutorial was provided on the optimal location and sizing of distributed generators (DGs) in DC grids using the general algebraic modeling system (GAMS), while in [
20], the same software was used for the optimal sizing of photovoltaic sources in DC grids while keeping in consideration a day-ahead environmental dispatch. Both approaches present the main advantages of implementing optimization models in GAMS; however, due to the nonlinear, non-convex mixed-integer structure of the studied problem, these approaches do not ensure the optimum global finding. The authors of [
21] presented multiple metaheuristic approaches for the optimal location and sizing of DGs in DC grids. For the location, the stage was used as a classical genetic algorithm to define the nodes where all the DGs would be be located, and for the sizing, the stage used constituted the continuous metaheuristics named the continuous genetic algorithm, particle swarm, and black-hole optimizers. Even if these algorithms were easily implementable using sequential programming, the main complication was that multiple tuning parameters and statistical tests were required to measure their efficiency, as there was no guarantee that a global solution would be achieved. The authors of [
22] presented a methodology for optimal dimensioning of wind turbines, photovoltaic sources, and batteries in hybrid AC/DC grids by proposing an optimization model that minimizes the life cycle cost of the system while keeping in consideration the life span of renewable energy resources. However, the model employed in the grid modeling is a linear simplification of the grid, which means that it is not possible to ensure that an optimal solution of the linear model is the optimal solution of the exact grid representation.
Based on the review mentioned of the state-of-the-art, we established that specialized literature has not reported an optimization method to address the problem of the optimal location and sizing of distributed generators in DC networks. In this sense, the main contributions of this research are summarized below:
- √
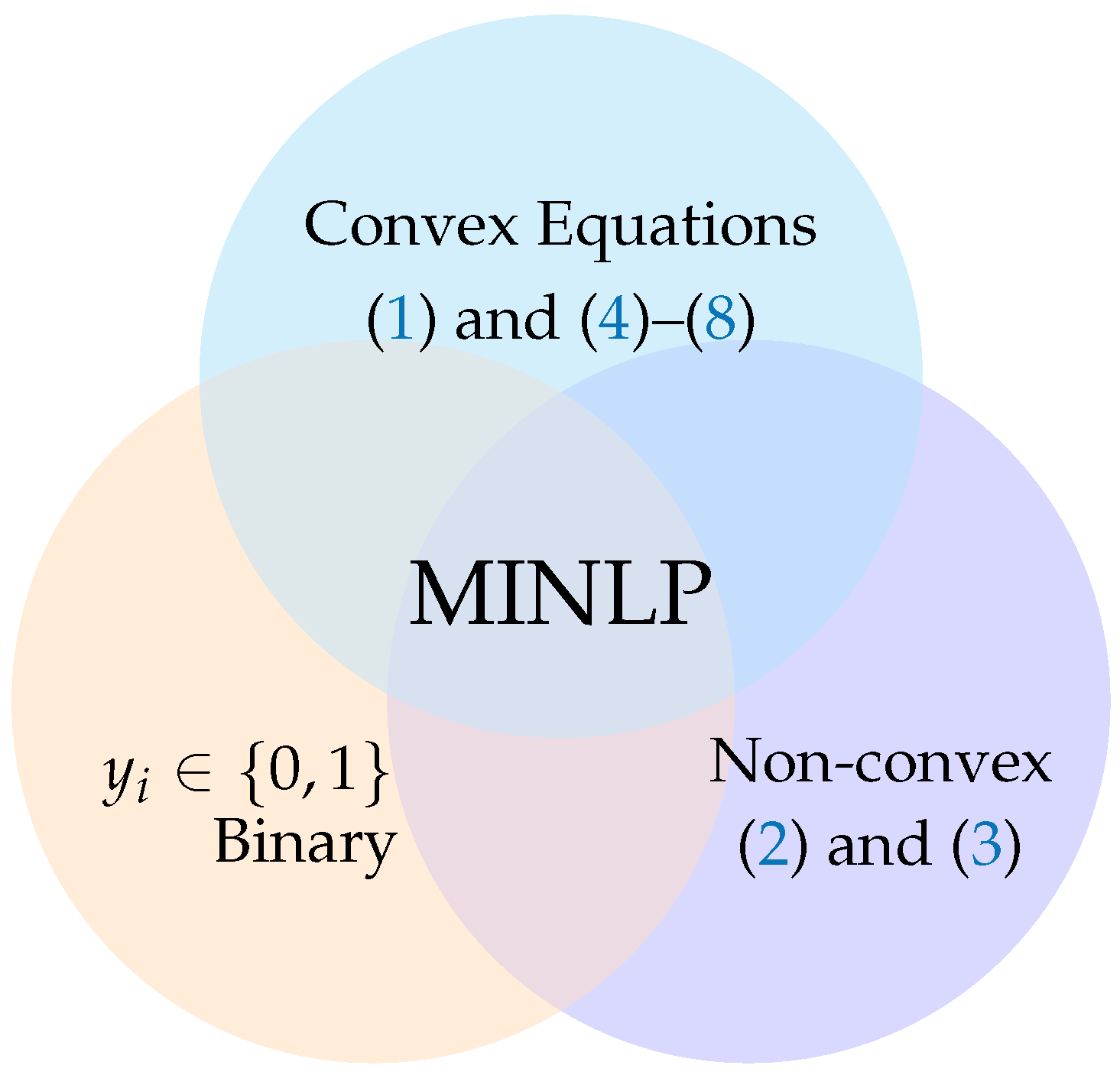
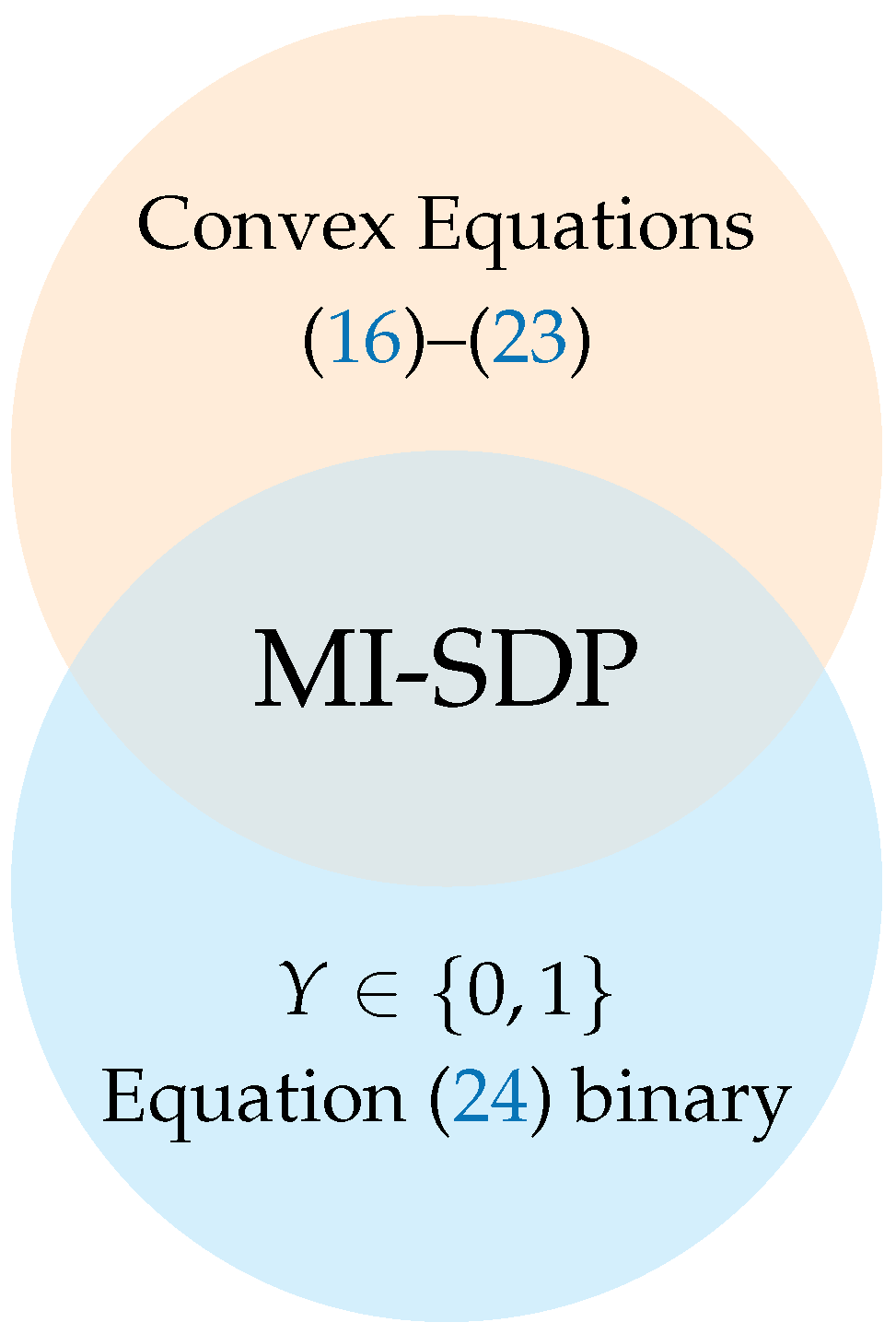
The reformulation of the mixed-integer nonlinear programming (MINLP) model that represents the exact optimization problem in a mixed-integer semidefinite programming model (MI-SDP).
- √
A global and optimal solution found using the combination of the branch and bound and interior point methods to solve the proposed MI-SDP model.
Note that the scope of this research focuses on the optimal sizing and location of DGs in DC distribution networks in medium- and low-voltage levels. We considered that DGs are fully dispatchable, i.e., they are constant power sources. In the case of renewable energy resources such as photovoltaic or wind turbines, we assumed that these would be connected in parallel with battery packages that controlled power output at a constant value at the node where the DG is located.
The remainder of this study is organized as follows:
Section 2 presents the classical MINLP model for the problem of the optimal location and sizing of distributed generators in DC grids, which considers the minimization of total grid losses as its objective function.
Section 3 presents the MI-SDP programming reformulation of the original MINLP model by focusing on power flow equations and the product of voltage variables and their restructuring via semidefinite programming.
Section 4 presents the main aspects of the solution methodology via the branch and bound method.
Section 5 offers the main characteristics of the 21- and 69-node test feeders. In
Section 6, we report the numerical validation of our proposed MI-SDP approach and compare it with nonlinear and metaheuristic optimization methods. Finally,
Section 7 presents the main conclusions derived from this research and some recommendations for future studies.
4. Solution Methodology
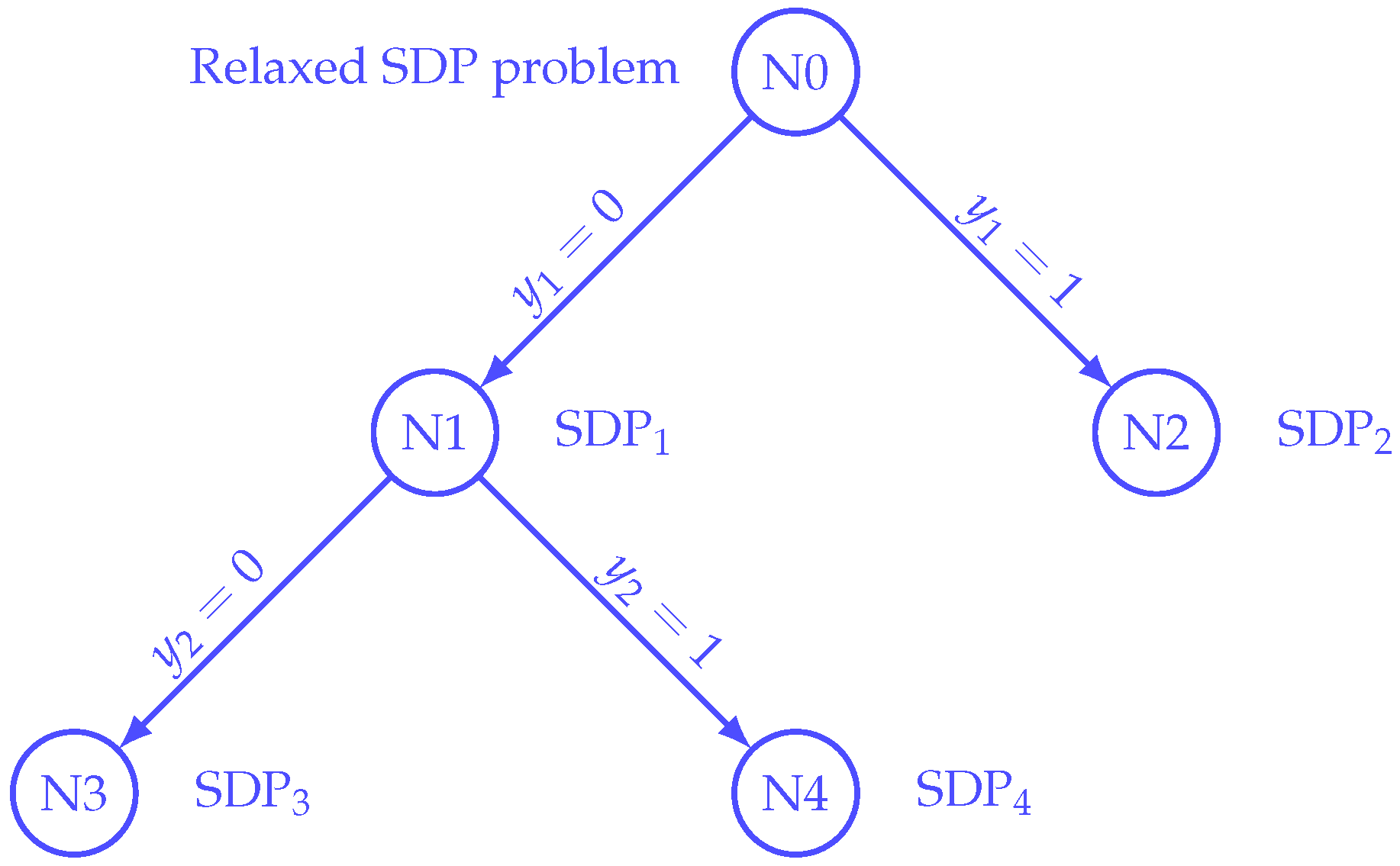
To address the optimal solution of the problem of the optimal location and dimensioning of distributed generators in direct current networks, the classical B&B method is combined with the SDP relaxation of the power flow problem as depicted in
Figure 2. Note that an MI-SDP problem has the following general structure:
where
,
, and
,
,
for all
. The set of indices of integer variables is given by
. Note that
is the space where symmetric semidefinite matrices are defined.
MI-SDPs with the mathematical form (
25) can be solved with a straightforward branch and bound algorithm. Branch and bound was first proposed for integer linear programs by Land and Doig [
28]. In 1965, Dakin [
29] realized that the problems do not have to be linear, but that the same technique can also be applied to general problems with integrality restrictions, as long as the sub-problems obtained by relaxing the integrality conditions and possibly adding variable bounds can be solved optimally [
24].
Figure 3 presents a small example of the evolution of an MI-SDP approach through a solution space with two variables.
Complete details about the implementation of the SDP-based branch and bound algorithm can be found in [
25].
6. Numerical Validation
The proposed MI-SDP model was implemented in the MATLAB software version 2019
b using the CVX and the branch and bound method on a desktop computer with an INTEL(R) Core(TM)
-7700
-GHz processor and 16.0 GB of RAM running on a 64-bit version of Microsoft Windows 10 Home. To validate the effectiveness and robustness of our mixed-integer convex reformulation of the optimal location and dimensioning of DGs in DC networks, we compared this with heuristic and metaheuristic approaches reported in recent literature. The comparative approaches are combinations of the discrete genetic algorithm (GA) with continuous methods, such as GA black hole optimizer (GA-BHO), GA continuous genetic algorithm (GA-CGA), and GA particle swarm optimization (GA-PSO) [
18]. In addition, we compared our results with hyperplanes combined with semidefinite and sequential quadratic programming methods, i.e., HSDP and HSQP, respectively [
17].
For both test feeders, we followed the simulating conditions reported in [
18], where
- √
The maximum power penetration in the DC test feeder was 60% of the total power consumption in the 21-node test feeder and 40% in the case of the 69-node test system.
- √
There were three distributed generators available for installation on the DC test feeder, where in the case of the 21-node test system their maximum individual allowed size was 1.5 pu, and in the case of the 69-node test feeder, this bound was 12 pu.
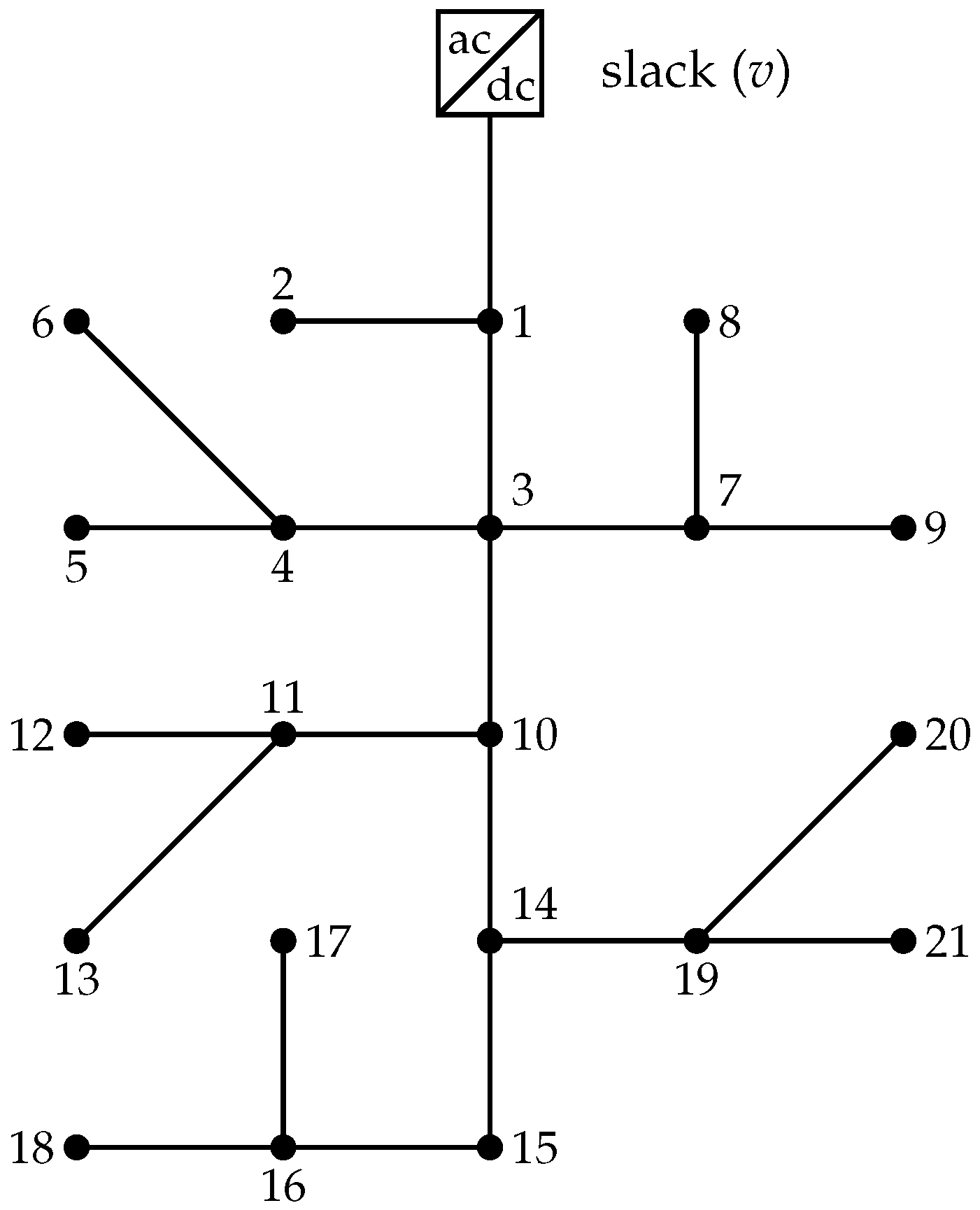
6.1. 21-Node Test Feeder
For this test system, the initial power losses without distributed generation were about
pu. When the MI-SDP method was applied to the 21-node test feeder, we found that the distributed generators must be located at nodes 9, 12, and 16 with power injections of
,
, and
pu, respectively; these produce final power losses of about
pu. This implies a total reduction of
in the power losses with respect to the best case. For comparative purposes, we used the general algebraic modeling system (GAMS) with different MINLP solvers to verify the efficiency of our MI-SDP approach. The numerical results are summarized in
Table 3.
From
Table 3, we can observe that due to the strong non-convexities of the power flow problem being added to the binary nature of the problem of installations of DGs in DC current, all the solvers available in GAMS have the ability to find the global optimal solution of the studied problem. In addition, we can observe that in the case of the local solutions, i.e., KNITRO and LINDO solvers, they got stuck in a sub-optimal solution wherein node 17 was selected in the final report instead of node 16. This is important, as in the case of large-scale distribution networks, the local solutions can be far from optimal. On the other hand, to verify this in the 21-node test feeder, we exhaustively evaluated all the possible solution points, i.e., 1140 options in the MATLAB software using nested-loops, where we found that the solution reported by the proposed MI-SDP is indeed the global optimum.
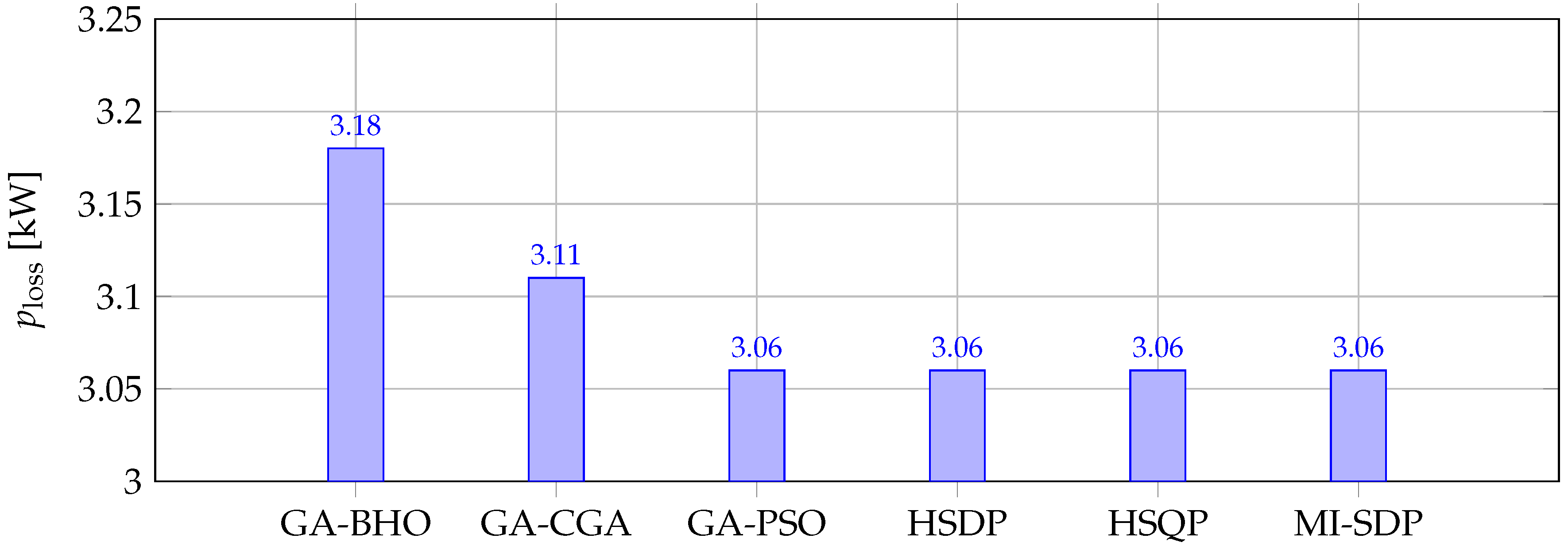
Regarding the comparison with metaheuristics in
Figure 6, the best results reported for the 21-node test feeder in the literature are presented in comparison with our proposed MI-SDP model.
Note that results in
Figure 6 show that some metaheuristics can find the global optimal solution of the problem. However, as mentioned in [
18], at each simulation, the optimal solution has little changes, which implies that these present standard deviations different from zero. At the same time, the standard deviations of the HSDP, the HSQP, and the proposed approach are zero. This is because they work with convex solution spaces regarding the optimal power flow, which does not happen in the metaheuristic cases.
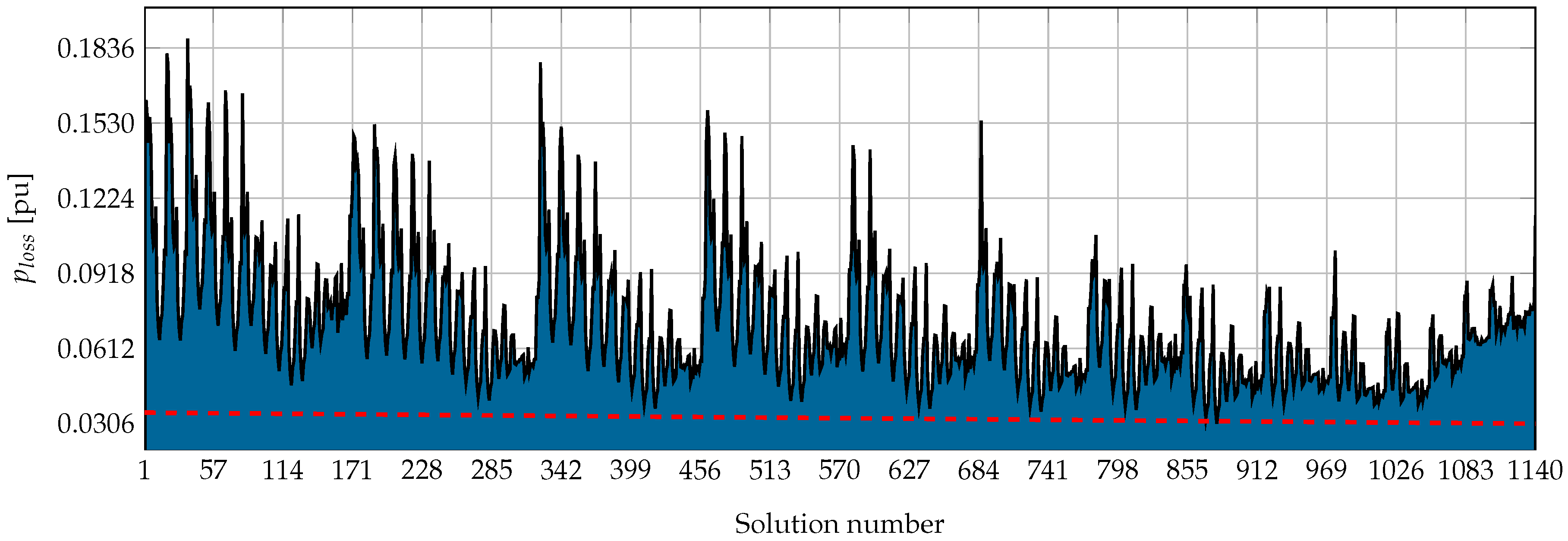
To present in a graphical manner the proposed MI-SDP approach that has the ability to find the global optimal solution in the 21-node test feeder, we plotted the information obtained after the exhaustive evaluation of the solution space, i.e., 1140 possible locations for the constant power sources, in
Figure 7.
Note that information plotted in
Figure 7 confirms that the global optimal solution in the case of the 21-node test feeder is about
pu of power loss, which is evidenced as no one solution is lower than the dashed line (see upper and lower peaks in the shaded figure). It is important to mention that the exhaustive evaluation took about 1150 s, whereas the GAMS and the proposed MI-SDP approach did not take more than 10 s, which confirms the efficiency of the optimization models in contrast with heuristic approaches.
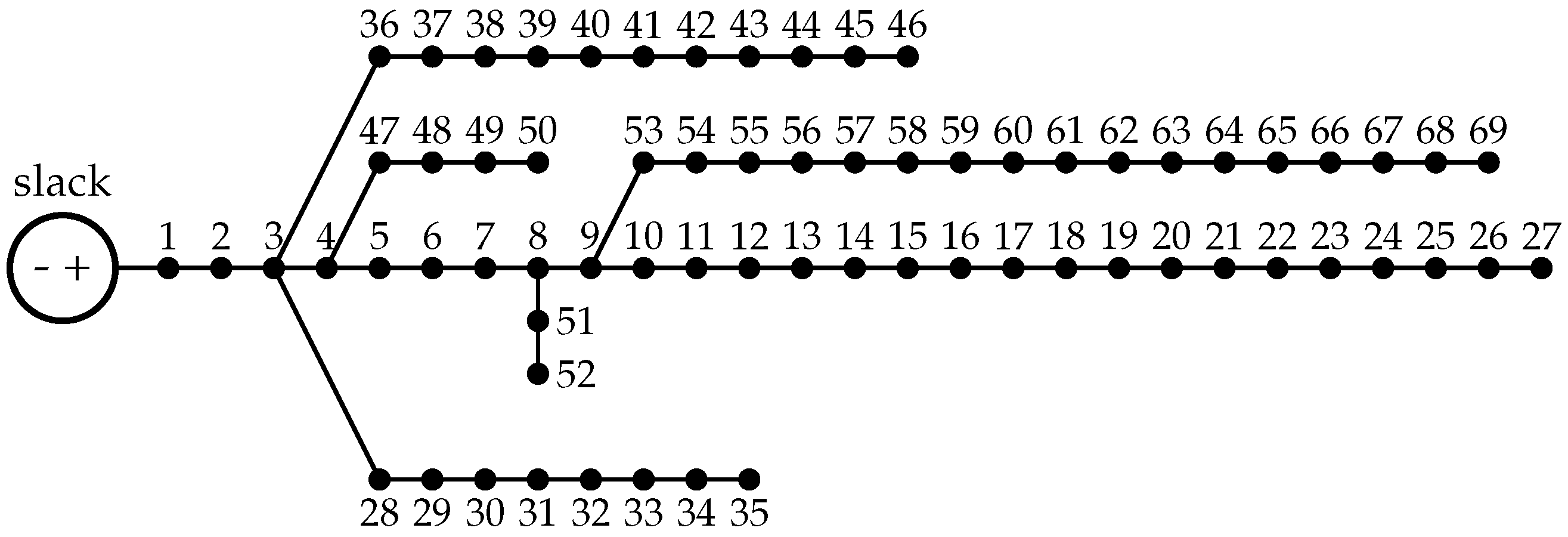
6.2. 69-Node Test Feeder
In the 69-node test feeder case, the base case without distributed generation produces total power losses of about
pu. When the MI-SDP model is implemented, the optimal nodes to locate GDs are 21, 61, and 64 with power generations of
,
, and
pu, respectively. These power injections produce final power losses of
pu, which implies that these generators allow the reduction of total grid power losses by about
, which corresponds with the results reported in [
17,
18] using the HSDP and HSQP approaches, respectively. It is worth mentioning that the solution determined by the proposed MI-SDP approach is indeed the optimum global, as it was verified by implementing an exhaustive approach that evaluates all the possibles node combinations for locating DGs, i.e., 50,116 options for this test feeder.
Table 4 reports the numerical results obtained by different solvers in the GAMS package.
From
Table 4, we can observe that only two solvers in the GAMS determined the global optimum regarding final power losses (see BONMINH and SBB solvers). However, the BONMINH solver identified the same nodes of the proposed MI-SDP approach, with some variations in the total power injections, while the SBB changed node 21 for the node 22, with similar results regarding power generation when compared with the BONMINH and the MI-SDP approaches. These variations may be attributed to the higher connectivity between nodes 21 and 22, as observed by the small resistance value of
pu (hence, higher connection) between nodes as shown in
Table 4. This means that there are multiples power injections that can achieve the same objective function value, as shown in [
17].
Remark 5. Despite some GAMS’s solvers reaching the global optimum of the problem, this cannot always be guaranteed. Furthermore, as the solution space grows, these solvers may fall to local optima, whereas the proposed technique will continue to reach the global optimum.
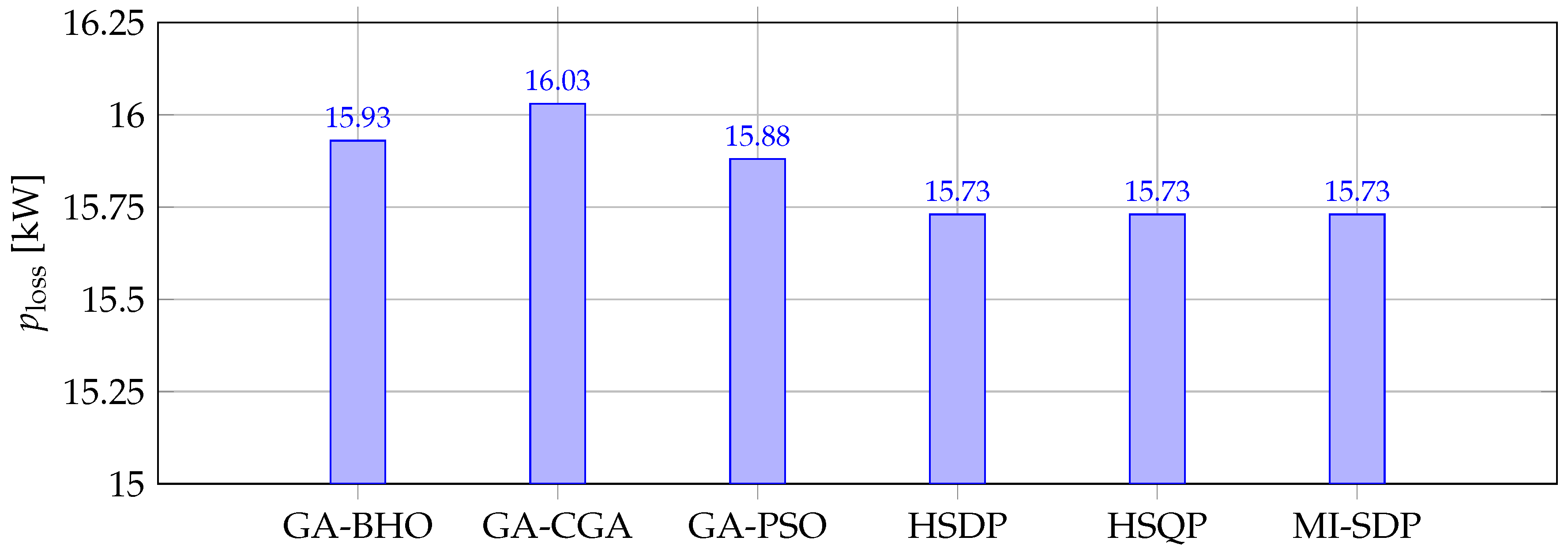
Regarding the comparison with metaheuristics,
Figure 8 reports the final power losses between the MI-SDP and the comparative approaches.
Based on the results reported in
Figure 8, we can confirm that when the solution space increases for the metaheuristic approaches, it is difficult to achieve the global optimum, as it gets stuck in a local optimum. This occurs due to not having a sense-solve optimal power flow problem with continuous metaheuristics, as in the literature, this problem can be solved precisely with convex formulations.
Remark 6. Note that HSDP and HSQP methods also achieve the global optimum of the problem. However, when presenting these results, it cannot be ensured their solutions are the global optimum, whereas the proposed method can ensure it. This indicates that the HSDP and HSQP methods may take out optimal nodes depending on the size of the test systems.
To demonstrate that the proposed MI-SDP approach can find the global optimum in the 69-node test feeder, at the same time, the GAMS solvers were stuck in locally optimal solutions; we present a simulation case where four distributed generators were available for installation considering 40% of thte distributed generation penetration, as reported in
Table 5.
From
Table 5, we can observe that all tested solvers in GAMS were stuck in locally optimal solutions, while the proposed MI-SDP approach dealt with the global optimal one by selecting nodes 21, 61, 64, and 67. It is worth mentioning that none of the GAMS solvers identified node 67 in the optimal solution, as GAMS solvers identified node 69 as the best solution, reported with an objective function value of
pu (see CONOPT and DICOPT). These solutions are suboptimal, as the global optimum found by the MI-SDP approach was
pu.
Regarding the processing times required by the different tested approaches, it was observed that all of them took less than 15 s, which can be considered very efficient for problems related to the optimal location and sizing of distributed generators (planning problems). These times are irrelevant, as the main interest is to guarantee the global optimum. In addition, the procedure of installing these power sources can take weeks or months. This means that the times in the order of seconds in the planning stage are negligible for any practical purpose.
6.3. Isolated Operation Scenario
One of the most important applications of distributed generation is the possibility of providing electrical service to remote (i.e., rural areas), where conventional power systems are non-existent [
30]. To demonstrate the ability of the proposed MI-SDP model to be applicable to isolated DC distribution networks, we considered the following: (i) the slack source was removed from the 69-node test feeder, (ii) the operative voltage bounds were assigned between
and
pu, (iii) three distributed generators could be located in the DC network, and
iv) the capability of each distributed generator was 20 pu.
Once that simulation scenario was evaluated, the proposed MI-SDP approach found that the best locations of these distributed generators were nodes 19, 50, and 61, with power injections of about , , and pu, respectively. The final power loss in this isolated operation scenario was about pu, while the low-voltage profile was about pu at node 11. These results confirm the possibility of extending the proposed MI-SDP model to rural applications, especially for providing service to non-interconnected zones.
7. Conclusions and Future Works
This paper presents a new mathematical formulation for the problem of optimal location and sizing of distributed generators in DC networks with interconnected or isolated operative conditions. This new formulation transforms the classical MINLP model into the MI-SDP to find the global optimum by using the classical branch and bound method, as each node explored is convex, based on the semidefinite programming reformulation of the power flow model. Numerical results demonstrated that the MI-SDP approach reached the best solution reported in the literature for both test feeders (global optimum), which was not possible with some MINLP solvers available in GAMS and the classical metaheuristic approaches. Based on the results reported in this research, it was possible to affirm that the proposed MI-SDP approach solved the problem of the optimal location and sizing of DGs in DC networks, as this approach guarantees the determination of the global optimum in a formal mathematical manner.
As for future works, it would be beneficial to work on the following topics: (i) the extension of the MI-SDP approaches to the problem of the optimal location of DGs and capacitor banks in AC distribution networks; (ii) the reformulation of the problem of the optimal operation of battery energy storage systems in DC networks using convex models instead of combinatorial approaches, and (iii) exploration of the convexification of the problem of the optimal reconfiguration of DC networks.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}