Author Contributions
Conceptualization, B.W., Ł.W. and M.K.; methodology, B.W.; software, D.R.; validation, B.W., M.K., Ł.W.; formal analysis, B.W.; investigation, B.W., M.K., Ł.W.; resources, B.W.; data curation, B.W.; writing—original draft preparation, B.W.; writing—review and editing, B.W. and M.K.; visualization, B.W.; supervision, B.W.; project administration, B.W.; funding acquisition, B.W. All authors have read and agreed to the published version of the manuscript.
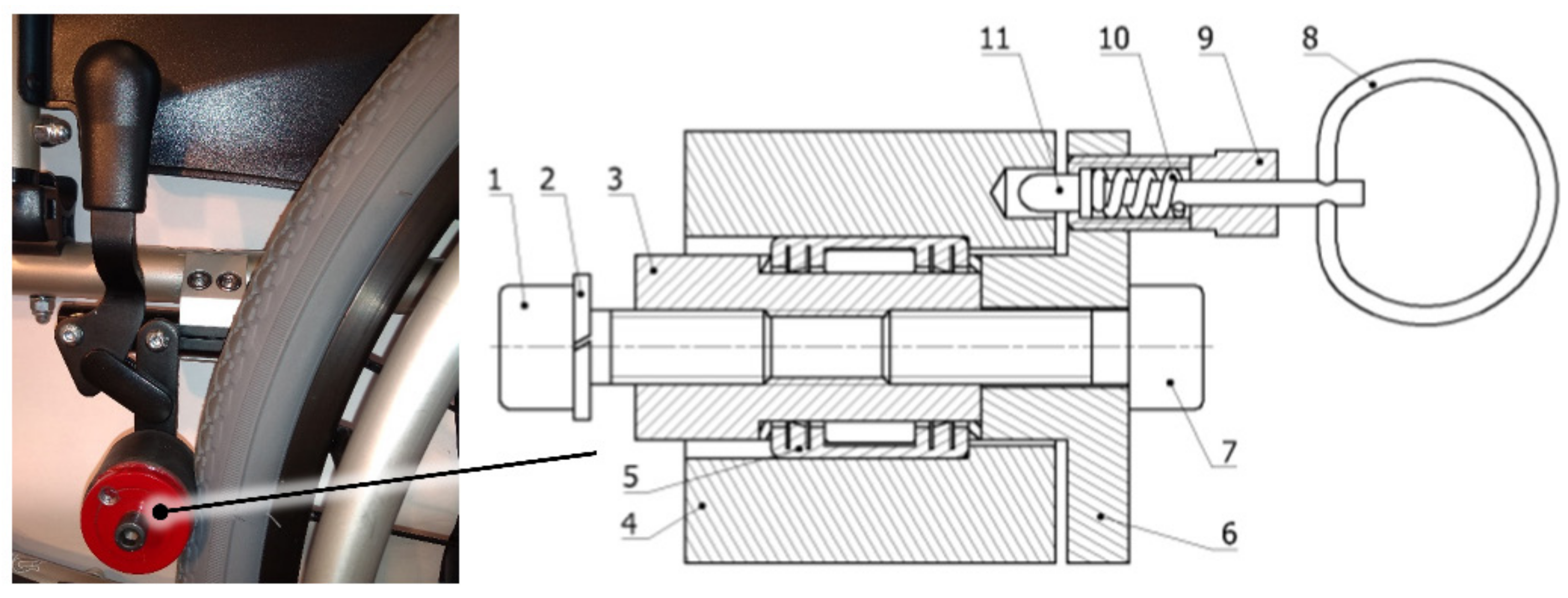
Figure 1.
The structure of the anti-rollback system used in the test.
Figure 1.
The structure of the anti-rollback system used in the test.
Figure 2.
Test ramp outline, where: Section A—a section of the road where the wheelchair was accelerated, Section B—a section of the ramp for which the measurement results were not considered, Section C—a section of the ramp for which measurement was carried out, Section D—a final section in which the wheelchair was stopped, α-ramp inclination angle.
Figure 2.
Test ramp outline, where: Section A—a section of the road where the wheelchair was accelerated, Section B—a section of the ramp for which the measurement results were not considered, Section C—a section of the ramp for which measurement was carried out, Section D—a final section in which the wheelchair was stopped, α-ramp inclination angle.
Figure 3.
A wheelchair with the test apparatus for measuring its motion kinematics, where: 1—incremental encoder with the resolution of 500 steps, a central unit collecting a measurement signal, 2—a central unit collecting a measurement signal. Selected symbol is the angular velocity of the right wheel of the wheelchair.
Figure 3.
A wheelchair with the test apparatus for measuring its motion kinematics, where: 1—incremental encoder with the resolution of 500 steps, a central unit collecting a measurement signal, 2—a central unit collecting a measurement signal. Selected symbol is the angular velocity of the right wheel of the wheelchair.
Figure 4.
The example of the wheelchair velocity diagram during slope climbing (A) and a separated single propelling cycle in the function of the percentage value of the propelling cycle completion (B).
Figure 4.
The example of the wheelchair velocity diagram during slope climbing (A) and a separated single propelling cycle in the function of the percentage value of the propelling cycle completion (B).
Figure 5.
The diagram with the wheelchair maximum velocity for all the analyzed measurement tests, where MAX v-on—wheelchair maximum velocity with the activated anti-rollback system, MAX v-off-wheelchair maximum velocity with the deactivated anti-rollback system, M MAX v-on—wheelchair average maximum velocity for all the measurement tests with the activated anti-rollback system, M MAX v-off—wheelchair average maximum velocity for all the measurement tests with the deactivated anti-rollback system.
Figure 5.
The diagram with the wheelchair maximum velocity for all the analyzed measurement tests, where MAX v-on—wheelchair maximum velocity with the activated anti-rollback system, MAX v-off-wheelchair maximum velocity with the deactivated anti-rollback system, M MAX v-on—wheelchair average maximum velocity for all the measurement tests with the activated anti-rollback system, M MAX v-off—wheelchair average maximum velocity for all the measurement tests with the deactivated anti-rollback system.
Figure 6.
The diagram of the path distance in a single propelling cycle for all the analyzed measurement tests, where s-on—a path distance in a single propelling cycle with the activated anti-rollback system, s-off—a path distance in a single propelling cycle with the deactivated anti-rollback system, M s-on—an average road for all the measurement tests with the activated anti-rollback system, M s-off—an average road for all the measurement tests with the deactivated anti-rollback system.
Figure 6.
The diagram of the path distance in a single propelling cycle for all the analyzed measurement tests, where s-on—a path distance in a single propelling cycle with the activated anti-rollback system, s-off—a path distance in a single propelling cycle with the deactivated anti-rollback system, M s-on—an average road for all the measurement tests with the activated anti-rollback system, M s-off—an average road for all the measurement tests with the deactivated anti-rollback system.
Figure 7.
The diagram of the push phase share in the propelling cycle for all the analyzed measurement tests, where push-on—a push phase share with the activated anti-rollback system, push-off—a push phase share with the deactivated anti-rollback system, M push-on—an average push phase share for all the measurement tests with the activated anti-rollback system, M push-off—an average push phase share for all the measurement tests with the deactivated anti-rollback system.
Figure 7.
The diagram of the push phase share in the propelling cycle for all the analyzed measurement tests, where push-on—a push phase share with the activated anti-rollback system, push-off—a push phase share with the deactivated anti-rollback system, M push-on—an average push phase share for all the measurement tests with the activated anti-rollback system, M push-off—an average push phase share for all the measurement tests with the deactivated anti-rollback system.
Figure 8.
The diagrams of (a) the average values of the maximum velocity in the propelling cycle and a (b) path distance in a single propelling cycle (B) for respective participants with the activated anti-rollback system (anti-rollback ON) and the deactivated anti-rollback system (anti-rollback system OFF). Where: ∆—a percentage difference between the parameter measured with the activated anti-rollback-system and with the deactivated anti-rollback-system.
Figure 8.
The diagrams of (a) the average values of the maximum velocity in the propelling cycle and a (b) path distance in a single propelling cycle (B) for respective participants with the activated anti-rollback system (anti-rollback ON) and the deactivated anti-rollback system (anti-rollback system OFF). Where: ∆—a percentage difference between the parameter measured with the activated anti-rollback-system and with the deactivated anti-rollback-system.
Figure 9.
The diagrams of (a) the average values of the propelling cycle duration time and (b) the push phase share in the propelling cycle for respective participants with the activated anti-rollback system (anti-rollback ON) and the deactivated anti-rollback system (anti-rollback system OFF). Where: ∆—a percentage difference between the parameter measured with the activated anti-rollback-system and with the deactivated anti-rollback-system.
Figure 9.
The diagrams of (a) the average values of the propelling cycle duration time and (b) the push phase share in the propelling cycle for respective participants with the activated anti-rollback system (anti-rollback ON) and the deactivated anti-rollback system (anti-rollback system OFF). Where: ∆—a percentage difference between the parameter measured with the activated anti-rollback-system and with the deactivated anti-rollback-system.
Figure 10.
The diagrams of (a) the average coefficient of the generated power and loss power ratio in a single propelling cycle and (b) the total mechanical energy of a single propelling cycle for respective participants with the activated anti-rollback system (anti-rollback ON) and the deactivated anti-rollback system (anti-rollback system OFF). Where: ∆—a percentage difference between the parameter measured with the activated anti-rollback-system and with the deactivated anti-rollback-system.
Figure 10.
The diagrams of (a) the average coefficient of the generated power and loss power ratio in a single propelling cycle and (b) the total mechanical energy of a single propelling cycle for respective participants with the activated anti-rollback system (anti-rollback ON) and the deactivated anti-rollback system (anti-rollback system OFF). Where: ∆—a percentage difference between the parameter measured with the activated anti-rollback-system and with the deactivated anti-rollback-system.
Figure 11.
The diagrams of the average muscle activity for respective participants with the activated anti-rollback system (anti-rollback ON) and with the deactivated anti-rollback system (anti-rollback system OFF). Where: ∆—a percentage difference between the muscle activity measured with the activated anti-rollback-system and with the deactivated anti-rollback-system.
Figure 11.
The diagrams of the average muscle activity for respective participants with the activated anti-rollback system (anti-rollback ON) and with the deactivated anti-rollback system (anti-rollback system OFF). Where: ∆—a percentage difference between the muscle activity measured with the activated anti-rollback-system and with the deactivated anti-rollback-system.
Table 1.
Comparison of anthropometric features and the level of experience in wheelchair operation of the test subjects. The experience was assessed on the basis of the number of hours spent driving a manual wheelchair.
Table 1.
Comparison of anthropometric features and the level of experience in wheelchair operation of the test subjects. The experience was assessed on the basis of the number of hours spent driving a manual wheelchair.
| | Height | Weight | Age | Push Force | Experience |
|---|
| (cm) | (kg) | (Years) | (N) | (-) |
|---|
| Participant 1 | 170 | 96 | 33 | 282 | ●●●●● |
| Participant 2 | 173 | 90 | 33 | 244 | ●●●●○ |
| Participant 3 | 178 | 89 | 32 | 315 | ●●●●● |
| Participant 4 | 175 | 83 | 32 | 292 | ●●●●○ |
| Participant 5 | 176 | 72 | 33 | 271 | ●●●○○ |
| Participant 6 | 180 | 74 | 33 | 290 | ●●○○○ |
| Participant 7 | 175 | 110 | 32 | 320 | ●●●●○ |
| Participant 8 | 170 | 103 | 29 | 311 | ●●●○○ |
Table 2.
The comparison of the average tested kinematic parameters during ramp climbing with the activated anti-rollback system and with the deactivated anti-rollback system, where M-mean, σ—standard deviation, µ—distribution skewness coefficient (the description of the kinematic parameter symbols is provided in the text).
Table 2.
The comparison of the average tested kinematic parameters during ramp climbing with the activated anti-rollback system and with the deactivated anti-rollback system, where M-mean, σ—standard deviation, µ—distribution skewness coefficient (the description of the kinematic parameter symbols is provided in the text).
| | | | | | | | | | | |
|---|
| (m/s) | (m/s) | (m/s) | (m) | (s) | (-) | (-) | (-) | (J) |
|---|
| anti–rollback ON | | 0.47 | 0.13 | 0.31 | 0.40 | 1.06 | 0.62 | 0.38 | 0.80 | 0.30 |
| 0.21 | 0.21 | 0.21 | 0.13 | 0.14 | 0.09 | 0.09 | 0.41 | 5.30 |
| 0.95 | 1.37 | 1.09 | 0.57 | −2.01 | −0.62 | 0.62 | 1.70 | −1.27 |
| anti-rollback OFF | | 0.54 | 0.27 | 0.42 | 0.43 | 0.99 | 0.62 | 0.38 | 0.97 | 0.29 |
| 0.23 | 0.22 | 0.23 | 0.15 | 0.17 | 0.10 | 0.10 | 0.48 | 5.49 |
| 0.64 | 0.54 | 0.55 | 0.95 | −0.87 | −0.07 | 0.07 | 1.49 | −2.82 |
Table 3.
The comparison of the average values of maximum velocity , of the roads, push phase duration time for respective participants. Where: ∆—a percentage difference between the parameter measured with the deactivated anti-rollback-system and the activated anti-rollback system, ON—activated anti-rollback system, OFF—deactivated anti-rollback system.
Table 3.
The comparison of the average values of maximum velocity , of the roads, push phase duration time for respective participants. Where: ∆—a percentage difference between the parameter measured with the deactivated anti-rollback-system and the activated anti-rollback system, ON—activated anti-rollback system, OFF—deactivated anti-rollback system.
| | | | | | | |
|---|
| (m/s) | (m/s) | (%) | (m) | (m) | (%) | (s) | (s) | (%) |
|---|
| ON | OFF | | ON | OFF | | ON | OFF | |
|---|
| Participant 1 | 0.44 | 0.70 | 37.14 | 0.38 | 0.45 | 15.56 | 1.10 | 0.75 | 46.67 |
| Participant 2 | 0.48 | 0.46 | 4.35 | 0.44 | 0.39 | 12.82 | 1.09 | 1.06 | 2.83 |
| Participant 3 | 0.86 | 0.96 | 10.42 | 0.52 | 0.61 | 14.75 | 0.73 | 0.69 | 5.80 |
| Participant 4 | 0.65 | 0.74 | 12.16 | 0.60 | 0.69 | 13.04 | 1.06 | 1.05 | 0.95 |
| Participant 5 | 0.27 | 0.32 | 15.63 | 0.28 | 0.30 | 6.67 | 1.11 | 1.10 | 0.91 |
| Participant 6 | 0.27 | 0.32 | 15.63 | 0.28 | 0.29 | 3.45 | 1.08 | 1.12 | 3.57 |
| Participant 7 | 0.34 | 0.34 | 0.00 | 0.29 | 0.31 | 6.45 | 1.08 | 1.09 | 0.92 |
| Participant 8 | 0.56 | 0.56 | 0.00 | 0.49 | 0.46 | 6.52 | 1.10 | 1.00 | 10.00 |
Table 4.
The comparison of the average values of the push phase share in the entire propelling cycle, a coefficient of the generated power and loss power ratio in the propelling cycle , total mechanical energy for a single propelling cycle . Where: —a percentage difference between the parameter measured with the deactivated anti-rollback-system and the activated anti-rollback system, ON—activated anti-rollback system, OFF—deactivated anti-rollback system.
Table 4.
The comparison of the average values of the push phase share in the entire propelling cycle, a coefficient of the generated power and loss power ratio in the propelling cycle , total mechanical energy for a single propelling cycle . Where: —a percentage difference between the parameter measured with the deactivated anti-rollback-system and the activated anti-rollback system, ON—activated anti-rollback system, OFF—deactivated anti-rollback system.
| | Push | Δ | λ | Δ | E | Δ |
|---|
| (-) | (-) | (%) | (-) | (-) | (%) | (J) | (J) | (%) |
|---|
| ON | OFF | | ON | OFF | | ON | OFF | |
|---|
| Participant 1 | 0.61 | 0.62 | 1.61 | 1.10 | 1.19 | 7.56 | 0.60 | −1.36 | 144.12 |
| Participant 2 | 0.53 | 0.64 | 17.19 | 1.10 | 1.31 | 16.03 | 3.37 | 1.24 | 171.77 |
| Participant 3 | 0.62 | 0.76 | 18.42 | 0.86 | 0.62 | 38.71 | −3.28 | −1.83 | 79.23 |
| Participant 4 | 0.69 | 0.63 | 9.52 | 0.58 | 0.95 | 38.95 | −3.41 | −0.50 | 582.00 |
| Participant 5 | 0.63 | 0.55 | 14.55 | 0.61 | 0.98 | 37.76 | 0.54 | 0.63 | 14.29 |
| Participant 6 | 0.64 | 0.59 | 8.47 | 0.57 | 1.02 | 44.12 | 0.27 | 0.79 | 65.82 |
| Participant 7 | 0.60 | 0.59 | 1.69 | 0.89 | 1.13 | 21.24 | 0.92 | 0.75 | 22.67 |
| Participant 8 | 0.61 | 0.57 | 7.02 | 0.91 | 0.82 | 10.98 | 1.37 | 0.12 | 1041.67 |
Table 5.
The comparison of the average percentage difference in the values of the tested parameters M∆—a percentage difference in the average values of a selected kinematic parameter resulting from the activation of the anti-rollback system, increase—the number of participants in which the analyzed parameter was higher with the activated anti-rollback system than with the deactivated anti-rollback system, decrease—the number of participants in which the analyzed parameter was lower with the activated anti-rollback system than with the deactivated anti-rollback system, equality—the number of participants in which the analyzed parameter was equal with the activated anti-rollback system and with the deactivated anti-rollback system.
Table 5.
The comparison of the average percentage difference in the values of the tested parameters M∆—a percentage difference in the average values of a selected kinematic parameter resulting from the activation of the anti-rollback system, increase—the number of participants in which the analyzed parameter was higher with the activated anti-rollback system than with the deactivated anti-rollback system, decrease—the number of participants in which the analyzed parameter was lower with the activated anti-rollback system than with the deactivated anti-rollback system, equality—the number of participants in which the analyzed parameter was equal with the activated anti-rollback system and with the deactivated anti-rollback system.
| | | Increase | Decrease | Equality |
|---|
|
(%)
| Number of Participants | Number of Participants | Number of Participants |
|---|
| 12 | 1 | 5 | 2 |
| 6 | 2 | 6 | 0 |
| 6 | 7 | 1 | 0 |
| 0 | 5 | 3 | 0 |
| 17 | 2 | 6 | 0 |
| 337 | 4 | 4 | 0 |
Table 6.
The comparison of the average muscle activity of deltoid muscle anterior and deltoid muscle posteriori for respective participants, where MA—muscle activity, ON—activated anti-rollback system, OFF—deactivated anti-rollback system, Δ—a percentage difference between muscle activity measured with the activated anti-rollback system and the deactivated anti-rollback system.
Table 6.
The comparison of the average muscle activity of deltoid muscle anterior and deltoid muscle posteriori for respective participants, where MA—muscle activity, ON—activated anti-rollback system, OFF—deactivated anti-rollback system, Δ—a percentage difference between muscle activity measured with the activated anti-rollback system and the deactivated anti-rollback system.
| | Deltoid Muscle Anterior
| Δ | Deltoid Muscle Posteriori
| Δ |
|---|
|
(%)
|
(%)
|
(%)
|
(%)
|
(%)
|
(%)
|
|---|
| ON | OFF | | ON | OFF | |
|---|
| Participant 1 | 121.88 | 168.53 | 27.68 | 64.27 | 67.75 | 5.14 |
| Participant 2 | 109.19 | 166.75 | 34.52 | 59.35 | 58.98 | 0.62 |
| Participant 3 | 112.74 | 137.98 | 18.29 | 64.06 | 72.84 | 12.06 |
| Participant 4 | 109.68 | 119.15 | 7.95 | 109.80 | 140.93 | 22.09 |
| Participant 5 | 40.54 | 46.30 | 12.43 | 85.49 | 94.56 | 9.59 |
| Participant 6 | 37.85 | 44.89 | 15.67 | 95.19 | 97.20 | 2.07 |
| Participant 7 | 41.19 | 50.15 | 17.87 | 54.73 | 67.49 | 17.87 |
| Participant 8 | 49.80 | 57.92 | 14.03 | 66.65 | 94.96 | 29.81 |
Table 7.
The comparison of the average muscle activity of triceps brachii and extensor carpi radialis longus for respective participants, where —muscle activity, ON—activated anti-rollback system, OFF—deactivated anti-rollback system, —a percentage difference between muscle activity measured with the activated anti-rollback system and the deactivated anti-rollback system.
Table 7.
The comparison of the average muscle activity of triceps brachii and extensor carpi radialis longus for respective participants, where —muscle activity, ON—activated anti-rollback system, OFF—deactivated anti-rollback system, —a percentage difference between muscle activity measured with the activated anti-rollback system and the deactivated anti-rollback system.
| | Triceps Brachii | | Extensor Carpi Radialis Longus
| |
|---|
| (%) | (%) | (%) | (%) | (%) | (%) |
|---|
| ON | OFF | | ON | OFF | |
|---|
| Participant 1 | 51.30 | 65.37 | 21.52 | 87.72 | 93.86 | 6.54 |
| Participant 2 | 60.16 | 66.00 | 8.85 | 71.59 | 82.41 | 13.14 |
| Participant 3 | 53.10 | 63.84 | 16.84 | 33.12 | 33.41 | 0.86 |
| Participant 4 | 37.46 | 46.05 | 18.67 | 37.39 | 43.37 | 13.79 |
| Participant 5 | 55.71 | 45.94 | 21.27 | 19.05 | 29.18 | 34.69 |
| Participant 6 | 46.69 | 55.05 | 15.18 | 18.14 | 23.26 | 22.01 |
| Participant 7 | 33.15 | 35.63 | 6.96 | 15.07 | 20.76 | 27.42 |
| Participant 8 | 27.55 | 43.92 | 37.28 | 26.99 | 28.43 | 5.08 |
Table 8.
The values of the student’s t-test for different muscles and participants.
Table 8.
The values of the student’s t-test for different muscles and participants.
| Muscle | Participant Number |
|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|
| Deltoid muscle anterior | 0.0343 | 0.0011 | 0.0001 | 0.0383 | 0.0320 | 0.1496 | 1.36 × 105 | 0.0314 |
| Deltoid muscle posteriori | 0.0008 | 0.0493 | 0.2260 | 0.0072 | 4.75 × 105 | 2.28 × 105 | 0.8412 | 0.6248 |
| Triceps brachii | 0.1963 | 0.0485 | 0.0018 | 2.13 × 105 | 2.70 × 105 | 0.0020 | 0.0470 | 0.0084 |
| Extensor carpi radialis longus | 0.0000 | 0.8673 | 0.0471 | 1.01 × 105 | 0.6146 | 0.0092 | 0.0020 | 0.0022 |
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}