In Situ Rubber-Wheel Contact on Road Surface Using Ultraviolet-Induced Fluorescence Method



Abstract
:1. Introduction
2. Methodology
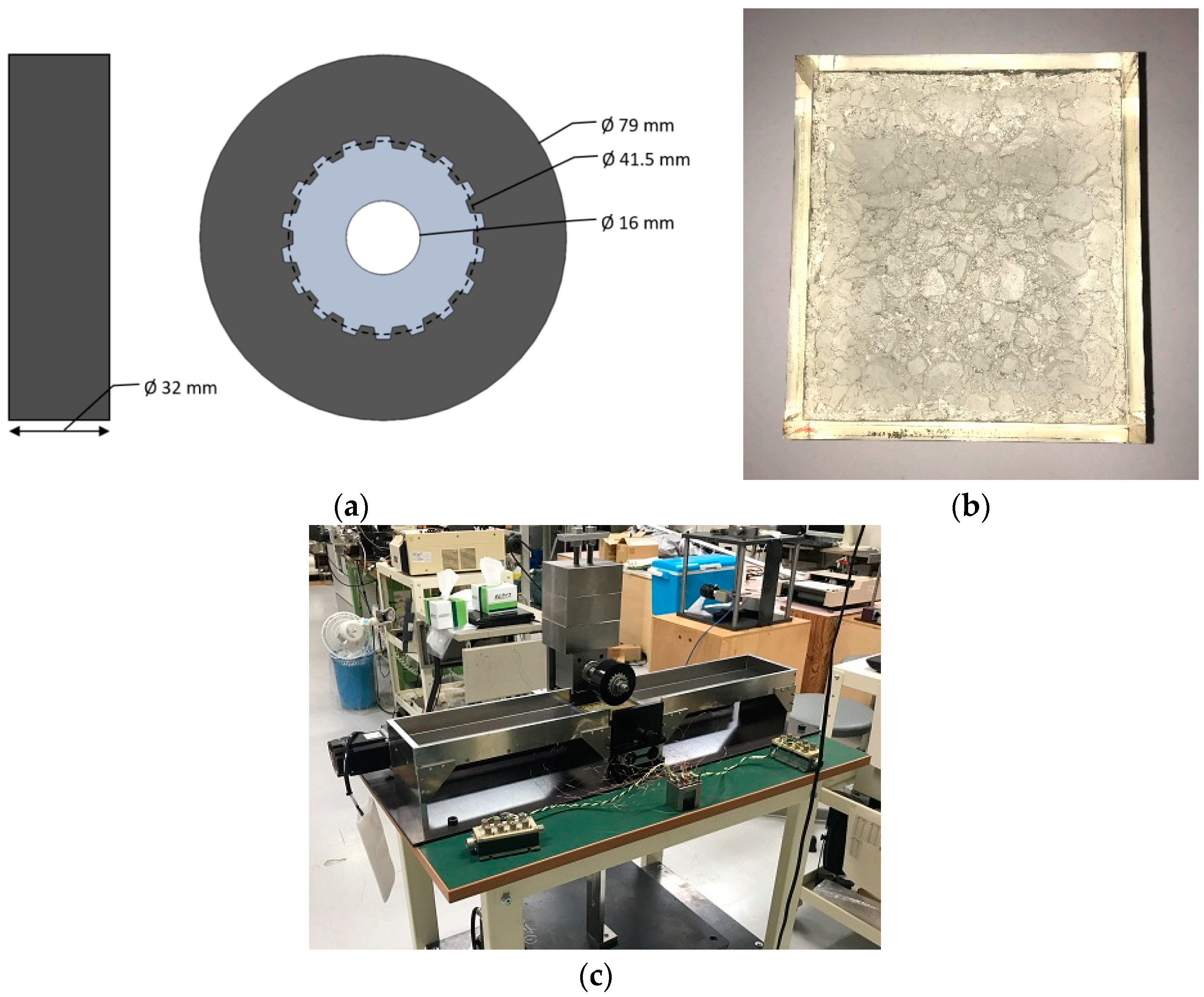
2.1. Experimental Setup
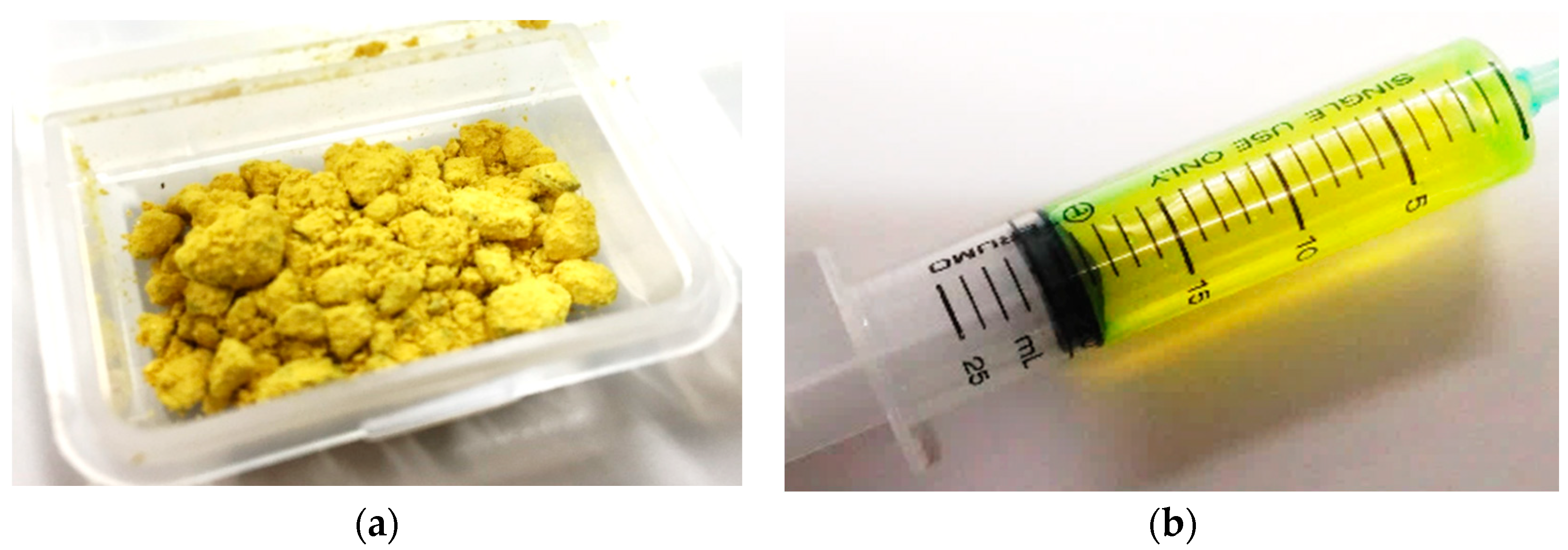
2.2. Pyranine Solution
2.3. Experimental Condition and Procedure
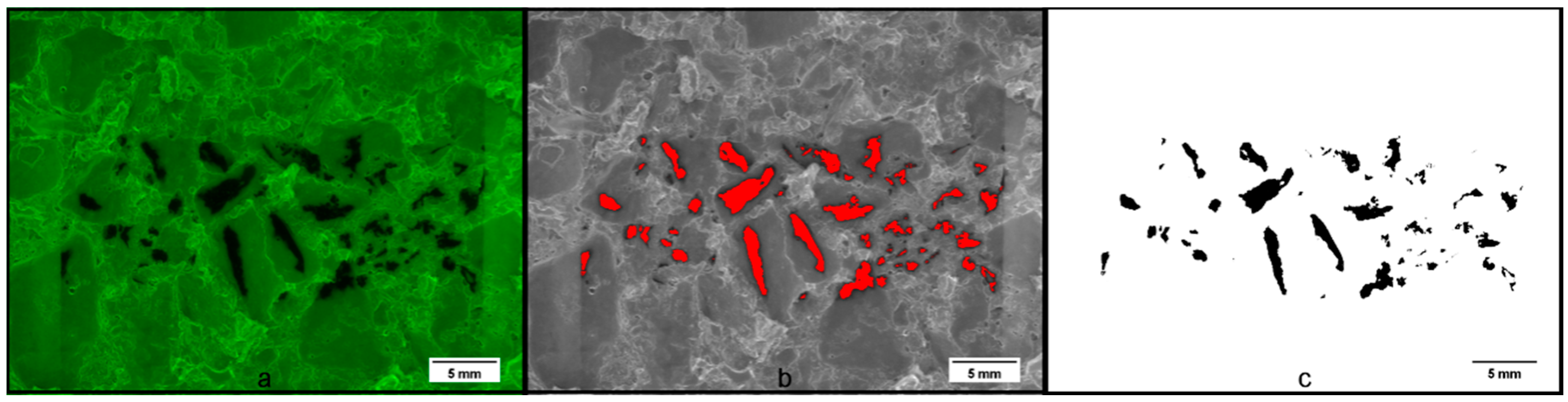
2.4. Apparent Contact Area Determination
3. Results and Discussion
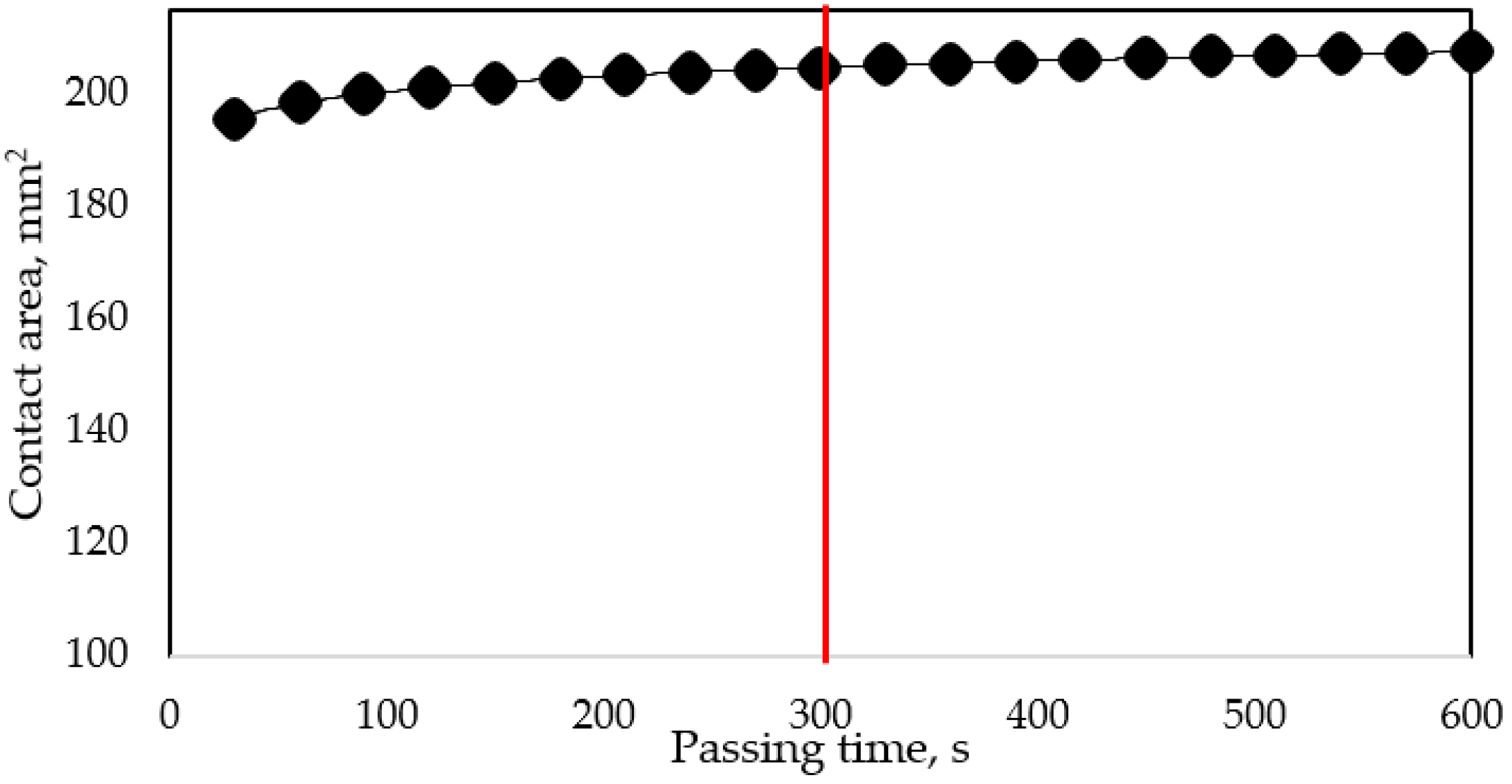
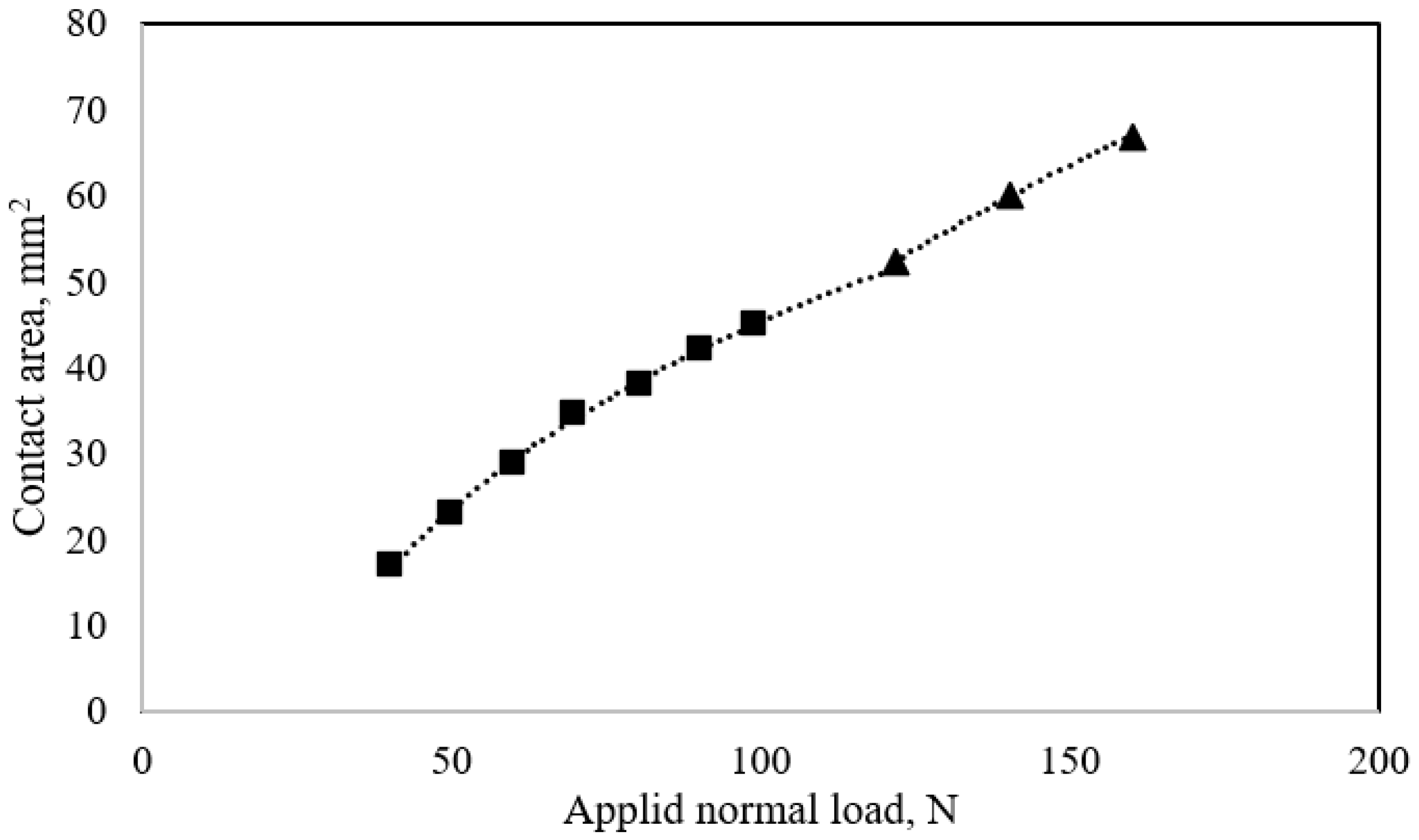
3.1. Contact Area in Static Condition
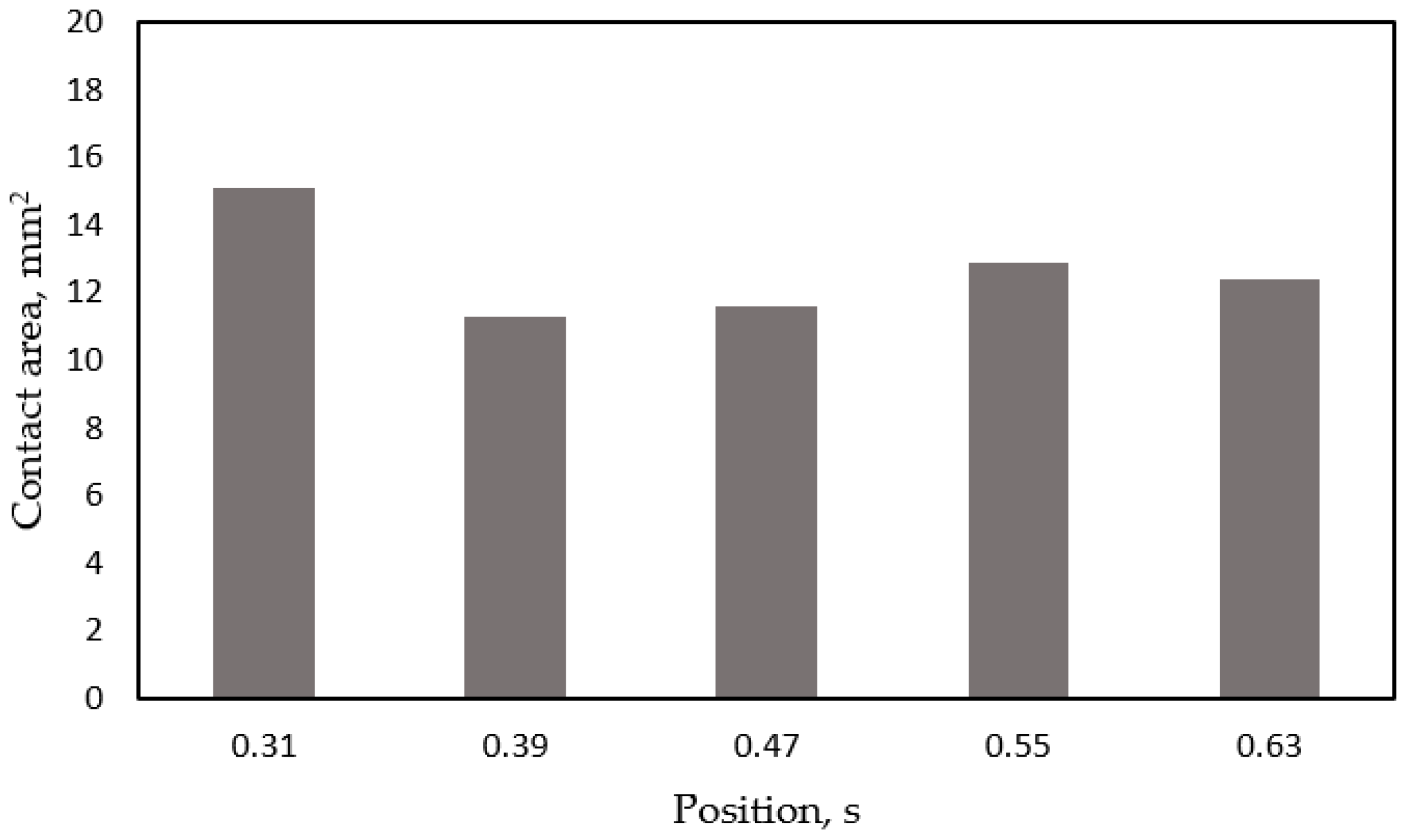
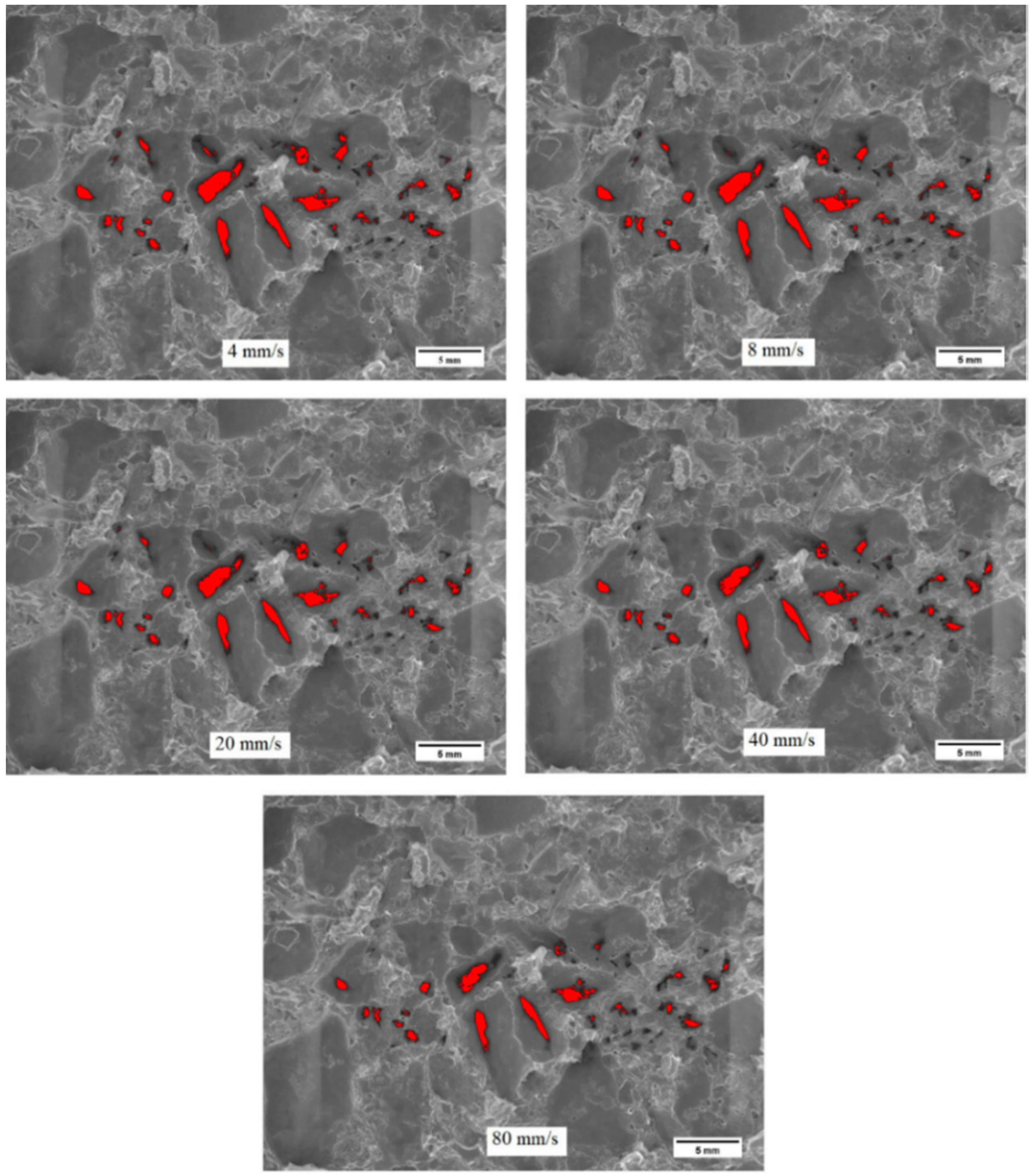
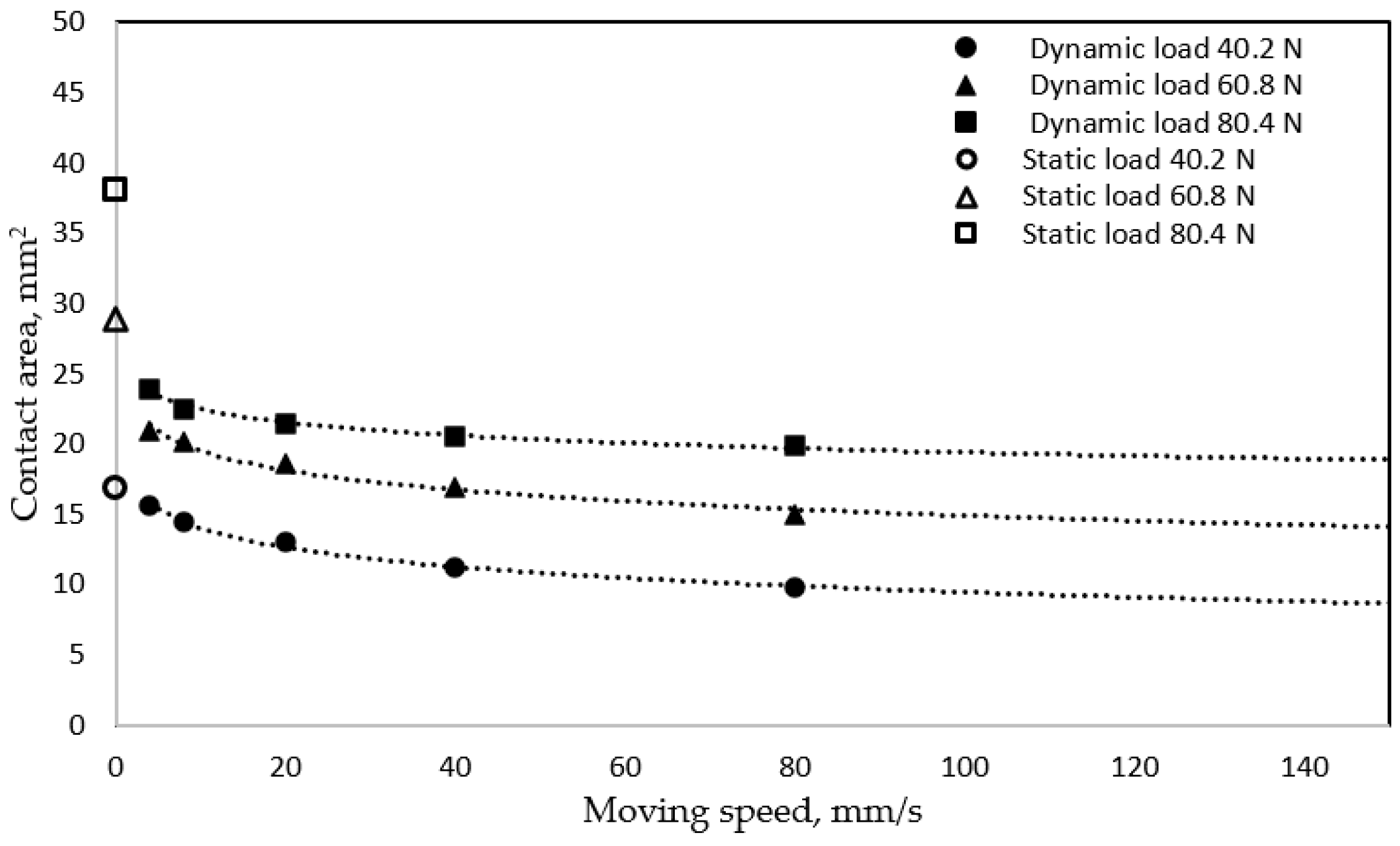
3.2. Contact Area in Dynamic Condition
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Winroth, J.; Kropp, W.; Hoever, C.; Höstmad, P. Contact stiffness considerations when simulating tyre/road noise. J. Sound Vib. 2017, 409, 274–286. [Google Scholar] [CrossRef]
- Steyn, W.J.V.; Ilse, M. Evaluation of Tire/Surfacing/Base Contact Stresses and Texture Depth. Int. J. Transp. Sci. Technol. 2015, 4, 107–118. [Google Scholar] [CrossRef] [Green Version]
- Das, S.; Redrouthu, B. Tyre Modelling for Rolling Resistance; Chalmers University of Technology: Gothenburg, Sweden, 2014. [Google Scholar]
- Heinrich, G.; Klüppel, M. Rubber friction, tread deformation and tire traction. Wear 2008, 265, 1052–1060. [Google Scholar] [CrossRef]
- Heckl, M. Tyre noise generation. Wear 1986, 113, 157–170. [Google Scholar] [CrossRef]
- Moore, D.F. Friction and wear in rubbers and tyres? Wear 1980, 61, 273–282. [Google Scholar] [CrossRef]
- Michelin. The Tyre Grip. 2001. Available online: http://www.dimnp.unipi.it/guiggiani-m/Michelin_Tire_Grip.pdf (accessed on 2 September 2020).
- Marx, N.; Guegan, J.; Spikes, H.A. Elastohydrodynamic film thickness of soft EHL contacts using optical interferometry. Tribol. Int. 2016, 99, 267–277. [Google Scholar] [CrossRef] [Green Version]
- Bongaerts, J.H.H.; Day, J.P.R.; Marriott, C.; Pudney, P.D.A.; Williamson, A.-M. In situ confocal Raman spectroscopy of lubricants in a soft elastohydrodynamic tribological contact. J. Appl. Phys. 2008, 104, 014913. [Google Scholar] [CrossRef]
- Fowell, M.; Myant, C.; Spikes, H.; Kadiric, A. A study of lubricant film thickness in compliant contacts of elastomeric seal materials using a laser induced fluorescence technique. Tribol. Int. 2014, 80, 76–89. [Google Scholar] [CrossRef]
- Myant, C.; Reddyhoff, T.; Spikes, H. Laser-induced fluorescence for film thickness mapping in pure sliding lubricated, compliant, contacts. Tribol. Int. 2010, 43, 1960–1969. [Google Scholar] [CrossRef] [Green Version]
- Gasni, D.; Ibrahim, M.W.; Dwyer-Joyce, R. Measurements of lubricant film thickness in the iso-viscous elastohydrodynamic regime. Tribol. Int. 2011, 44, 933–944. [Google Scholar] [CrossRef]
- Poll, G.; Gabelli, A. Formation of Lubricant Film in Rotary Sealing Contacts: Part II—A New Measuring Principle for Lubricant Film Thickness. J. Tribol. 1992, 114, 290–296. [Google Scholar] [CrossRef]
- Ma, L.; Zhang, C. Discussion on the Technique of Relative Optical Interference Intensity for the Measurement of Lubricant Film Thickness. Tribol. Lett. 2009, 36, 239–245. [Google Scholar] [CrossRef]
- Smart, A.; Ford, R. Measurement of thin liquid films by a fluorescence technique. Wear 1974, 29, 41–47. [Google Scholar] [CrossRef]
- Ford, R.A.J.; Foord, C.A. Laser-based fluorescence techniques for measuring thin liquid films. Wear 1978, 51, 289–297. [Google Scholar] [CrossRef]
- Kedziora, K.M.; Prehn, J.H.M.; Dobrucki, J.; Bernas, T. Method of calibration of a fluorescence microscope for quantitative studies. J. Microsc. 2011, 244, 101–111. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; Shen, Y.; Zhang, H.; Tang, Z.; Yuan, X.; Liu, C. Visualization of structured packing with laser induced fluorescence technique: Two-dimensional measurement of liquid concentration distribution. Trans. Tianjin Univ. 2016, 22, 466–472. [Google Scholar] [CrossRef]
- Avnir, Y.; Barenholz, Y. pH determination by pyranine: Medium-related artifacts and their correction. Anal. Biochem. 2005, 347, 34–41. [Google Scholar] [CrossRef]
- Zhu, H.; Derksen, R.; Krause, C.; Fox, R.; Brazee, R.; Ozkan, H. Fluorescent Intensity of Dye Solutions under Different pH Conditions. J. ASTM Int. 2005, 2. [Google Scholar] [CrossRef] [Green Version]
- Santana, J.; Perez, K.R.; Pisco, T.B.; Pavanelli, D.D.; Filho, D.B.; Rezende, D.; Triboni, E.R.; Lima, F.D.C.A.; Magalhães, J.L.; Cuccovia, I.M.; et al. A high sensitive ion pairing probe (the interaction of pyrenetetrasulphonate and methyl viologen): Salt and temperature dependences and applications. J. Lumin 2014, 151, 130–137. [Google Scholar] [CrossRef]
- Barnadas-Rodríguez, R.; Estelrich, J. Effect of salts on the excited state of pyranine as determined by steady-state fluorescence. J. Photochem. Photobiol. A Chem. 2008, 198, 262–267. [Google Scholar] [CrossRef]
- Satoru, M.; Fumihiro, I.; Takashi, N. Optical measurements of real contact area and tangential contact stiffness in rough interface between an adheshive soft elastomer and a glass plate. J. Adv. Mech. Design Syst. Manuf. 2015, 9, 1–14. [Google Scholar]
- Bur, A.J.; Vangel, M.G.; Roth, S. Temperature Dependence of Fluorescent Probes for Applications to Polymer Materials Processing. Appl. Spectrosc. 2002, 56, 174–181. [Google Scholar] [CrossRef]
- Hidrovo, C.H.; Brau, R.R.; Hart, U.P. Excitation nonlinearities in emission reabsorption laser-induced fluorescence techniques. Appl. Opt. 2004, 43, 894–913. [Google Scholar] [CrossRef] [PubMed]
- Syafi’i, S.I.; Wahyuningrum, R.T.; Muntasa, A. Segmentation obyek pada citra digital menggunakan metode Otsu thresholding. J. Inform. 2015, 13, 1–8. [Google Scholar]
- Persson, B.N.J. Elastoplastic contact between randomly rough surfaces. Phys. Rev. Lett. 2001, 87, 116101. [Google Scholar] [CrossRef] [Green Version]
- Zheng, B.; Huang, X.; Zhang, W.; Zhao, R.; Zhu, S. Adhesion Characteristics of Tire-Asphalt Pavement Interface Based on a Proposed Tire Hydroplaning Model. Adv. Mater. Sci. Eng. 2018, 2018, 1–12. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specimen | Urethan |
|---|---|
| Dimensions, mm | 98 × 108 × 37 |
| Density, g/cm3 | 2.51 |
| Poisson’s ratio | 0.35 |
| Young modulus, MPa | 200 |
| Specimen | Tire Rubber |
|---|---|
| Diameter, mm | ø79 |
| Width, mm | 32 |
| Poisson’s ratio | 0.49 |
| Young modulus, MPa | 2 |
| Contact Condition | Applied Load (N) |
|---|---|
| Static contact | 40.2 |
| Static contact | 50.0 |
| Static contact | 59.8 |
| Static contact | 69.7 |
| Static contact | 80.4 |
| Static contact | 90.3 |
| Static contact | 99.1 |
| Static contact | 121.6 |
| Static contact | 140.3 |
| Static contact | 159.9 |
| Contact Condition | Applied Load (N) | Moving Speed (mm/s) |
|---|---|---|
| Dynamic contact | 4 | |
| Dynamic contact | 40.2 | 8 |
| Dynamic contact | 60.8 | 20 |
| Dynamic contact | 80.4 | 40 |
| Dynamic contact | 80 |
| Camera | High-Speed Camera |
|---|---|
| Field of view, mm | 40 × 30 |
| Number of pixels, pixels | 1600 × 1200 |
| Frame rate, fps | 100 |
| Shutter speed, | 1/200 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, J.; Shoukaku, Y.; Iwai, T. In Situ Rubber-Wheel Contact on Road Surface Using Ultraviolet-Induced Fluorescence Method. Appl. Sci. 2020, 10, 8804. https://doi.org/10.3390/app10248804
Rahman J, Shoukaku Y, Iwai T. In Situ Rubber-Wheel Contact on Road Surface Using Ultraviolet-Induced Fluorescence Method. Applied Sciences. 2020; 10(24):8804. https://doi.org/10.3390/app10248804
Chicago/Turabian StyleRahman, Jhonni, Yutaka Shoukaku, and Tomoaki Iwai. 2020. "In Situ Rubber-Wheel Contact on Road Surface Using Ultraviolet-Induced Fluorescence Method" Applied Sciences 10, no. 24: 8804. https://doi.org/10.3390/app10248804