A Novel Bionic Structure Inspired by Luffa Sponge and Its Cushion Properties


Abstract
:1. Introduction
2. Materials and Methods
2.1. Geometry of Bionic Structure
2.2. Sample Preparation
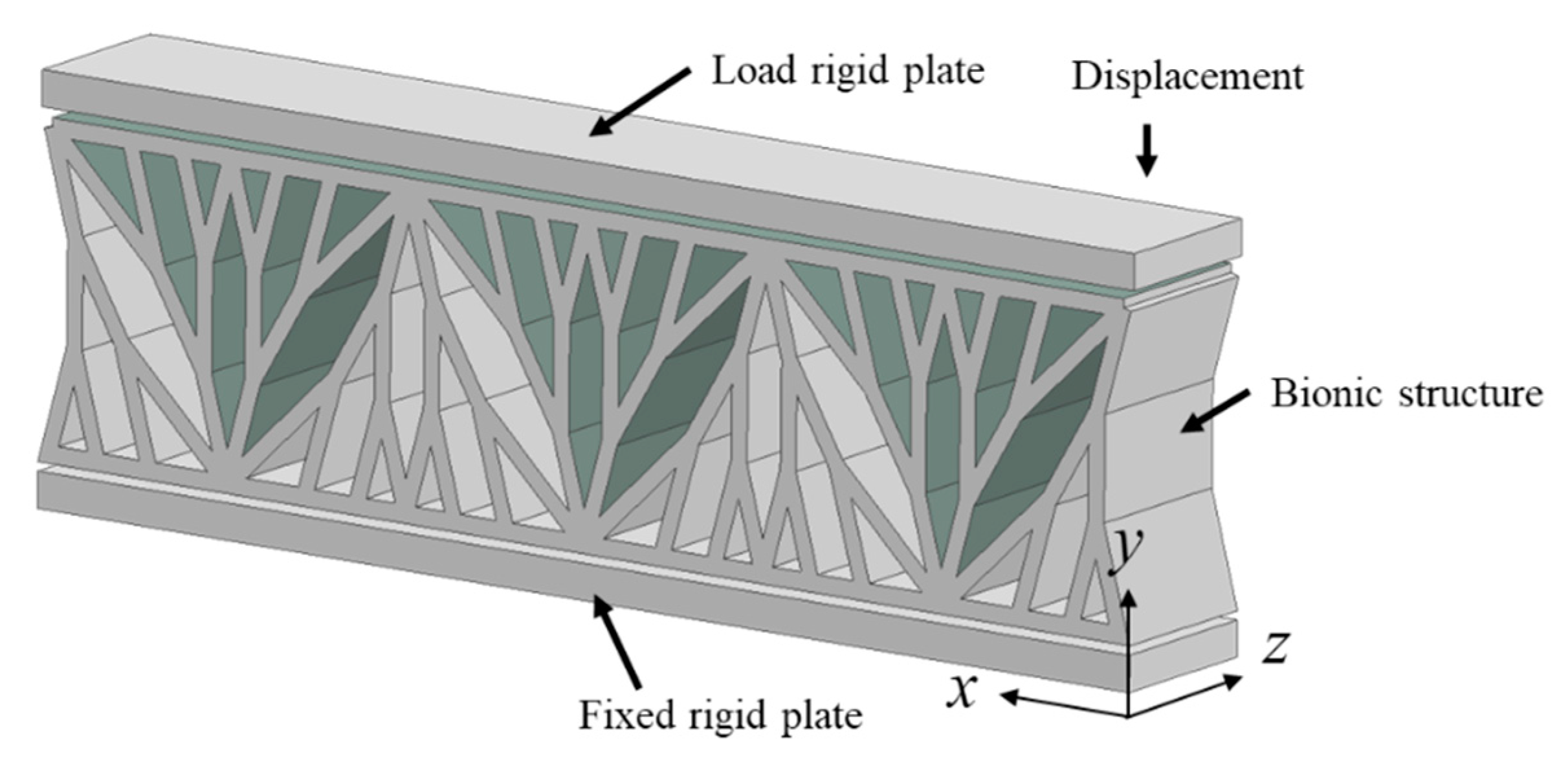
2.3. Finite Element Modelling
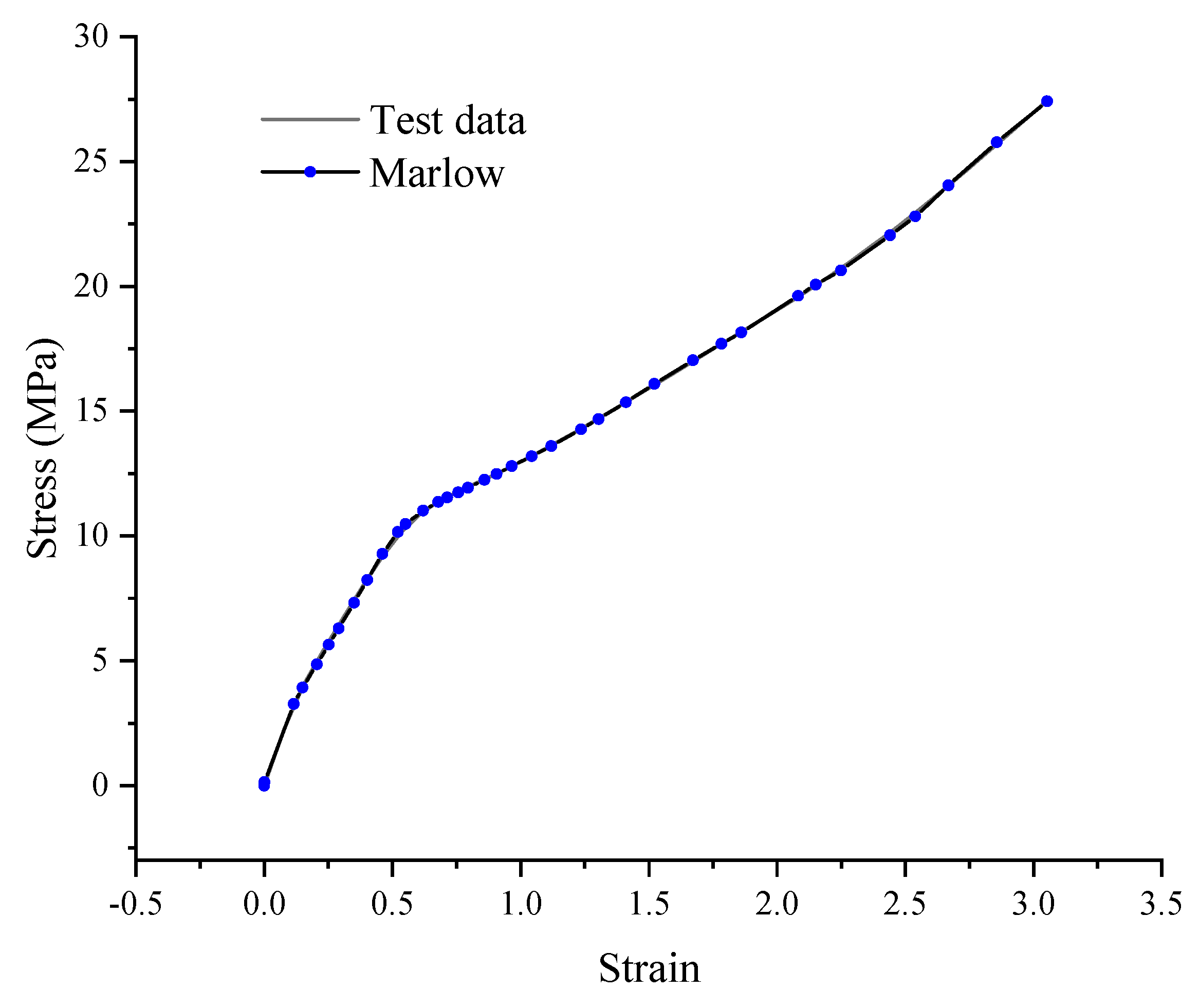
2.4. Quasi-Static Compress
2.5. Indicator of Cushion Properties
3. Results and Discussion
3.1. Numerical Analysis Results
3.2. The Energy Absorption Properties of Bionic Structure
3.3. The Influence of Design Degree
3.4. Optimization of Bionic Structure
3.5. Comparison and Discussions
4. Conclusions
- Fractal theory can be used to successfully design a bionic structure and enrich the ideas and methods of bionic structure design.
- The quasi-static compression experiment and FEA results of the bionic structure are in good agreement; and the cushion performance of the bionic structure is close to that of luffa sponge according to and specific strength map.
- By optimization designing, the influence of design degrees () on energy absorption was less than length (). So, the length is a key parameter to design geometry and enhance energy absorption.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| Design degree of bionic structure | |
| Thickness of model shell | |
| The length of RVE model | |
| The width of RVE model | |
| The length of order rib | |
| The length of order rib | |
| The length of order rib | |
| Densification strain | |
| Plateau stress | |
| Elastic modulus | |
| Energy absorption efficiency | |
| Energy per unit of reference volume in Abaqus | |
| Energy absorption | |
| Specific energy absorption per unit volume | |
| Specific energy absorption per unit mass | |
| Fractal dimension | |
| The number of box |
Appendix A

Appendix B
References
- Ha, N.S.; Lu, G. A review of recent research on bio-inspired structures and materials for energy absorption applications. Compos. Part B Eng. 2020, 181, 1–38. [Google Scholar] [CrossRef]
- Hao, P.; Du, J.X. Energy absorption characteristics of bio-inspired honeycomb column thin walled structure under impact loading. J. Mech. Behav. Biomed. Mater. 2018, 79, 301–308. [Google Scholar] [CrossRef] [PubMed]
- Peng, M.; Wen, Z.; Xie, L.; Cheng, J.; Jia, Z.; Shi, D.; Zeng, H.; Zhao, B.; Liang, Z.; Li, T.; et al. 3D Printing of Ultralight Biomimetic Hierarchical Graphene Materials with Exceptional Stiffness and Resilience. Adv. Mater. 2019, 31, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Gu, D.; Lin, K.; Yang, Y.; Ma, C. Optimization of bio-inspired bi-directionally corrugated panel impact-resistance structures: Numerical simulation and selective laser melting process. J. Mech. Behav. Biomed. Mater. 2019, 91, 59–67. [Google Scholar] [CrossRef]
- Xie, Y.; Gao, Y.; Zhang, S.; Bai, H.; Liu, Z. Sustainability Evaluation of Product Packaging System with a Three-Stage Network Data Envelopment Analysis Methodology. Appl. Sci. 2019, 9, 246. [Google Scholar] [CrossRef] [Green Version]
- Yang, K.; Xu, S.Q.; Shen, J.H.; Zhou, S.W.; Xie, Y.M. Energy absorption of thin-walled tubes with pre-folded origami patterns: Numerical simulation and experimental verification. Thin Walled Struct. 2016, 103, 33–44. [Google Scholar] [CrossRef]
- Fleck, N.; Deshpande, V.S.; Ashby, M.F. Micro-architectured materials: Past, present and future. Proc. R. Soc. A Math. Phys. Eng. Sci. 2010, 466, 2495–2516. [Google Scholar] [CrossRef]
- Arjangpay, A.; Darvizeh, A.; Tooski, M.Y. Effects of Structural Characteristics of a Bionic Dragonfly Wing on Its Low Velocity Impact Resistance. J. Bionic Eng. 2018, 15, 859–871. [Google Scholar] [CrossRef]
- Ha, N.S.; Lu, G.; Shu, D.; Yu, T.X. Mechanical properties and energy absorption characteristics of tropical fruit durian (Durio zibethinus). J. Mech. Behav. Biomed. Mater. 2019, 104, 1–13. [Google Scholar] [CrossRef]
- Hao, P.; Du, J.X. Mechanical properties of bio-mimetic energy-absorbing materials under impact loading. J. Mater. Sci. 2018, 53, 3189–3197. [Google Scholar] [CrossRef]
- Zhang, W.; Yin, S.; Yu, T.X.; Xu, J. Crushing resistance and energy absorption of pomelo peel inspired hierarchical honeycomb. Int. J. Impact Eng. 2019, 125, 163–172. [Google Scholar] [CrossRef]
- An, X.Y.; Fan, H.L. Hybrid design and energy absorption of luffa-sponge-like hierarchical cellular structures. Mater. Des. 2016, 106, 247–257. [Google Scholar] [CrossRef]
- Shen, J.H.; Xie, Y.M.; Huang, X.D.; Zhou, S.W.; Ruan, D. Mechanical properties of luffa sponge. J. Mech. Behav. Biomed. Mater. 2012, 15, 141–152. [Google Scholar] [CrossRef] [PubMed]
- Xie, Y.; Liu, L.; Gao, Y.F.; Zhang, S.H. Study on Energy Absorption Property of Luffa Sponge Under Static Load. Packag. J. 2017, 9, 39–44. (In Chinese) [Google Scholar] [CrossRef]
- Shen, J.H.; Xie, Y.M.; Huang, X.D.; Zhou, S.W.; Ruan, D. Behaviour of luffa sponge material under dynamic loading. Int. J. Impact Eng. 2013, 57, 17–26. [Google Scholar] [CrossRef]
- Mandelbrot, B. The Fractal Geometry of Nature. J. R. Stat. Soc. Ser. A 1984, 147, 170–180. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.; Wang, C.; Zeng, Y.; Chen, T. Crashworthiness of bionic fractal hierarchical structures. Mater. Des. 2018, 158, 147–159. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; He, N.; Wang, C.H. Crashworthiness behavior of Koch fractal structures. Mater. Des. 2018, 144, 229–244. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, M.H.; Wang, C.H.; Sun, G.Y.; Li, G.Y. Out-of-plane crashworthiness of bio-inspired self-similar regular hierarchical honeycombs. Compos. Struct. 2016, 144, 1–13. [Google Scholar] [CrossRef]
- Wang, X.J.; Shen, J.H.; Zuo, Z.H.; Huang, X.D.; Zhou, S.W.; Xie, Y.M. Numerical investigation of compressive behaviour of luffa-filled tubes. Compos. Part B Eng. 2015, 73, 149–157. [Google Scholar] [CrossRef]
- Chen, Q.; Shi, Q.; Gorb, S.N.; Li, Z.Y. A multiscale study on the structural and mechanical properties of the luffa sponge from Luffa cylindrica plant. J. Biomech. 2014, 47, 1332–1339. [Google Scholar] [CrossRef]
- Lin, T.; Lou, C.-W.; Lin, J.-H. The Effects of Thermoplastic Polyurethane on the Structure and Mechanical Properties of Modified Polypropylene Blends. Appl. Sci. 2017, 7, 1254. [Google Scholar] [CrossRef] [Green Version]
- Hamzehei, R.; Kadkhodapour, J.; Anaraki, A.P.; Rezaei, S.; Dariushi, S.; Rezadoust, A.M. Octagonal auxetic metamaterials with hyperelastic properties for large compressive deformation. Int. J. Mech. Sci. 2018, 145, 96–105. [Google Scholar] [CrossRef]
- Li, Q.M.; Magkiriadis, I.; Harrigan, J.J. Compressive Strain at the Onset of Densification of Cellular Solids. J. Cell. Plast. 2006, 42, 371–392. [Google Scholar] [CrossRef]
- de la Rosa, Á.; Ruiz, G.; Poveda, E. Study of the Compression Behavior of Steel-Fiber Reinforced Concrete by Means of the Response Surface Methodology. Appl. Sci. 2019, 9, 5330. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.M.; Bai, Z.Y. Mechanical property of paper honeycomb structure under dynamic compression. Mater. Des. 2015, 77, 59–64. [Google Scholar] [CrossRef]
- Rian, I.M.; Sassone, M. Tree-inspired dendriforms and fractal-like branching structures in architecture: A brief historical overview. Front. Archit. Res. 2014, 3, 298–323. [Google Scholar] [CrossRef] [Green Version]
- Yin, H.; Liu, Z.; Dai, J.; Wen, G.; Zhang, C. Crushing behavior and optimization of sheet-based 3D periodic cellular structures. Compos. Part B Eng. 2020, 182, 1–16. [Google Scholar] [CrossRef]
- Schneider, C.A.; Rasband, W.S.; Eliceiri, K.W. NIH Image to ImageJ: 25 years of image analysis. Nat. Methods 2012, 9, 671–675. [Google Scholar] [CrossRef]
- Smith, T.G.; Lange, G.D.; Marks, W.B. Fractal methods and results in cellular morphology--dimensions, lacunarity and multifractals. J. Neurosci. Methods 1996, 69, 123–136. [Google Scholar] [CrossRef] [Green Version]
- Sarkar, N.; Chaudhuri, B.B. An efficient differential box-counting approach to compute fractal dimension of image. IEEE Trans. Syst. Man Cybern. 1994, 24, 115–120. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Diameter of Nozzle | Layer Height | Mesh Fill Rates | Nozzle Temperature |
|---|---|---|---|
| 0.4 mm | 0.72 mm | 40% | 210 °C |
| (°) | 9 | 11 | 13 | 15 |
| (mm) | 0.66 | 0.76 | 0.89 | 1.00 |
| (°) | (MPa) | (MPa) | (MPa) | % | (J/g) | (kJ/m3) |
|---|---|---|---|---|---|---|
| 9 | 9.53 | 0.48 | 0.45 | 25.96 | 0.46 | 191.94 |
| 11 | 8.39 | 0.44 | 0.40 | 24.24 | 0.26 | 126.20 |
| 13 | 9.62 | 0.47 | 0.39 | 23.91 | 0.16 | 90.43 |
| 15 | 9.40 | 0.55 | 0.53 | 25.41 | 0.31 | 192.16 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Y.; Bai, H.; Liu, Z.; Chen, N. A Novel Bionic Structure Inspired by Luffa Sponge and Its Cushion Properties. Appl. Sci. 2020, 10, 2584. https://doi.org/10.3390/app10072584
Xie Y, Bai H, Liu Z, Chen N. A Novel Bionic Structure Inspired by Luffa Sponge and Its Cushion Properties. Applied Sciences. 2020; 10(7):2584. https://doi.org/10.3390/app10072584
Chicago/Turabian StyleXie, Yong, Hailong Bai, Zhenghao Liu, and Nanning Chen. 2020. "A Novel Bionic Structure Inspired by Luffa Sponge and Its Cushion Properties" Applied Sciences 10, no. 7: 2584. https://doi.org/10.3390/app10072584