Design and Dynamics of Kinetic Launcher for Unmanned Aerial Vehicles


Abstract
:
1. Introduction
- energy savings (fuel, electricity);
- compensation for insufficient on board power reserves;
- enables the take-off of UAVs without chassis;
- can be used when runway is limited or inaccessible (muddy terrain, high grass, stones, etc.);
- increases the level of operator’s safety;
- provides new possibilities for UAV design (location of wings and propulsion sources, chassis elimination);
- ensures special start conditions (acceleration, velocity, initial angle of attack, etc.).
2. Kinetic Launcher Idea Description and Mathematical Model
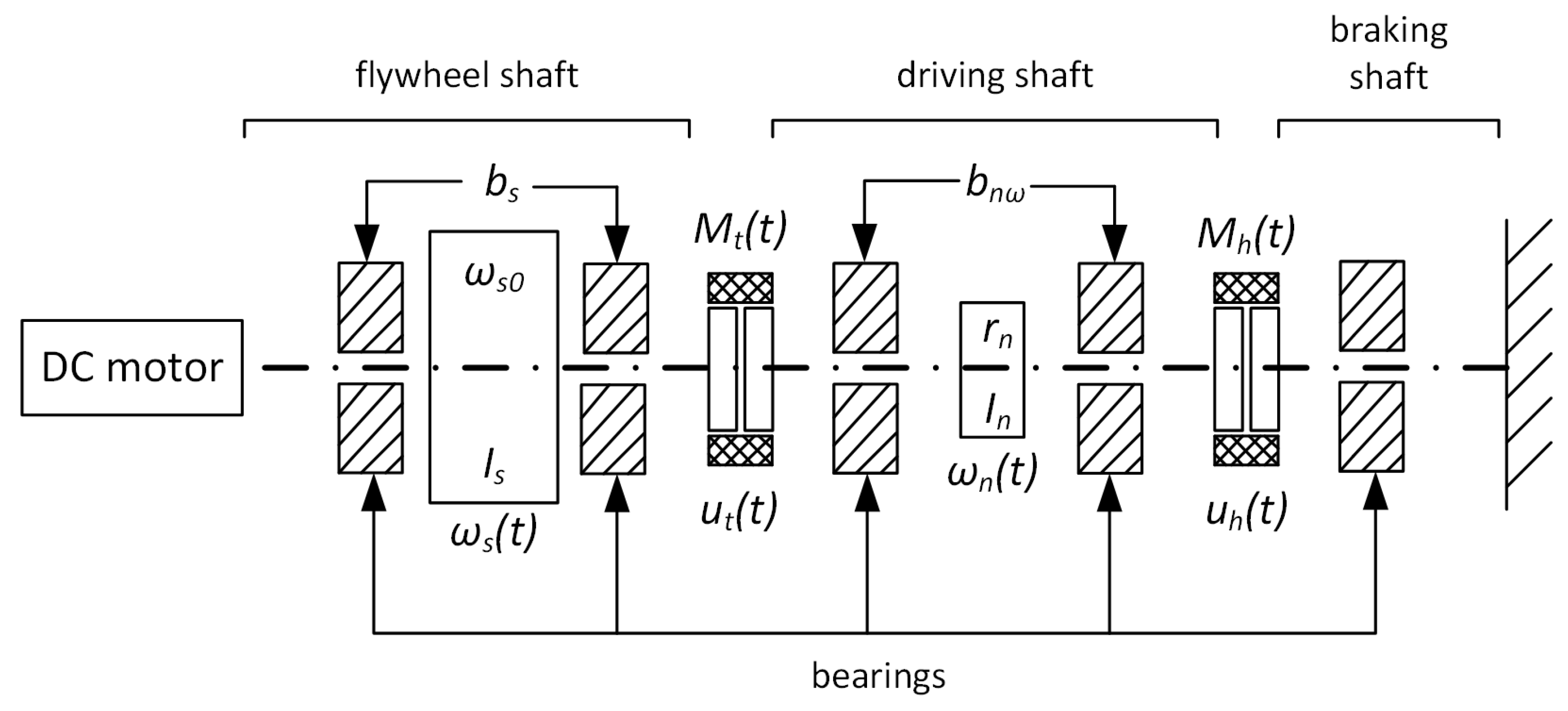
2.1. Structure of Kinetic Launcher
| b | - flywheel damping rate, [Nm/rad/s]; |
| - initial angular speed of the flywheel, [rad/s]; | |
| I | - flywheel moment of inertia, [kgm]; |
| (t) | - angular speed of the flywheel, [rad/s]; |
| M(t) | - driving torque transmitted by the clutch, [Nm]; |
| u(t) | - electromagnetic clutch control signal, [dimensionless]; |
| b | - damping rate of the rotating drive elements, [Nm/rad/s]; |
| r | - radius of the drive wheels of the launcher, [m]; |
| I | - total moment of inertia of the driving and driven wheels, [kgm]; |
| (t) | - angular speed of the driving tooth wheels, [rad/s]; |
| M(t) | - braking torque transmitted by the clutch, [Nm]; |
| u(t) | - electromagnetic brake control signal, [dimensionless]. |
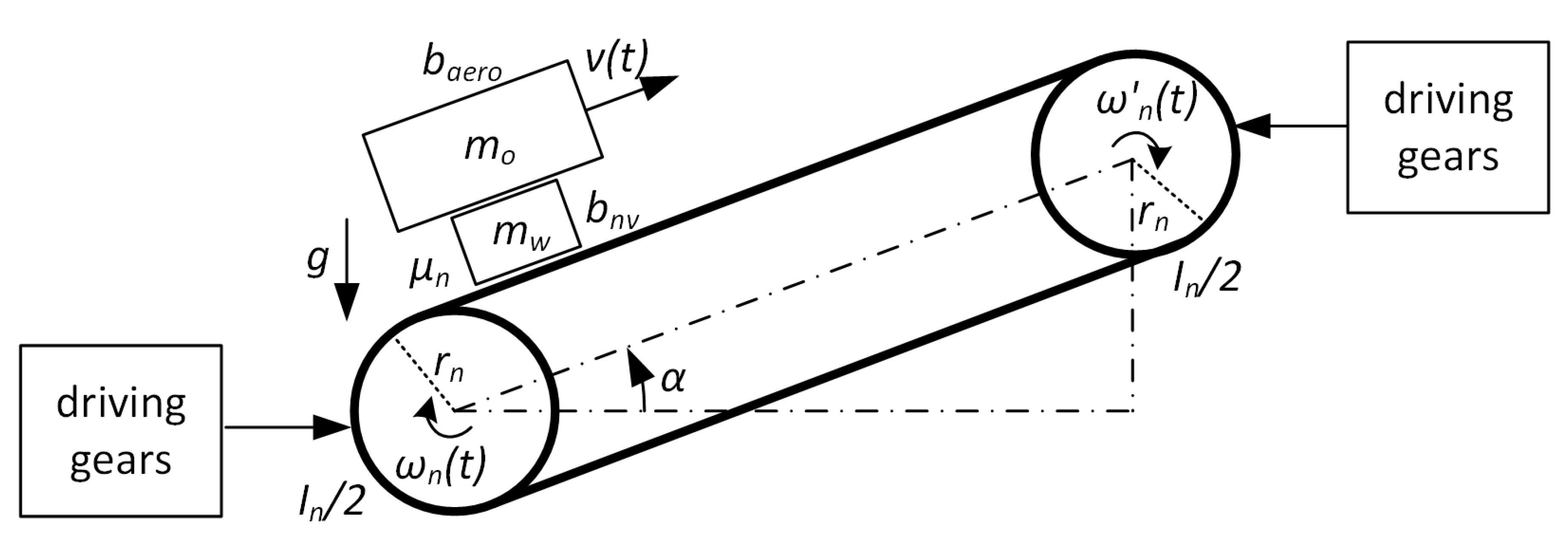
| g | - gravitational acceleration, [m/s]; |
| - Coulomb friction coefficient, [dimensionless]; | |
| b | - aerodynamic damping rate, [N/m/s]; |
| m | - mass of UAV, [kg]; |
| m | - mass of launcher cart, [kg]; |
| v(t) | - velocity of the UAV and launcher cart, [m/s]; |
| b | - damping rate of the linear motion, [N/m/s]; |
| - angle of launch, [rad]; | |
| (t) | - angular speed of the driven wheels, [rad/s]. |
2.2. Mathematical Description
3. Simulations
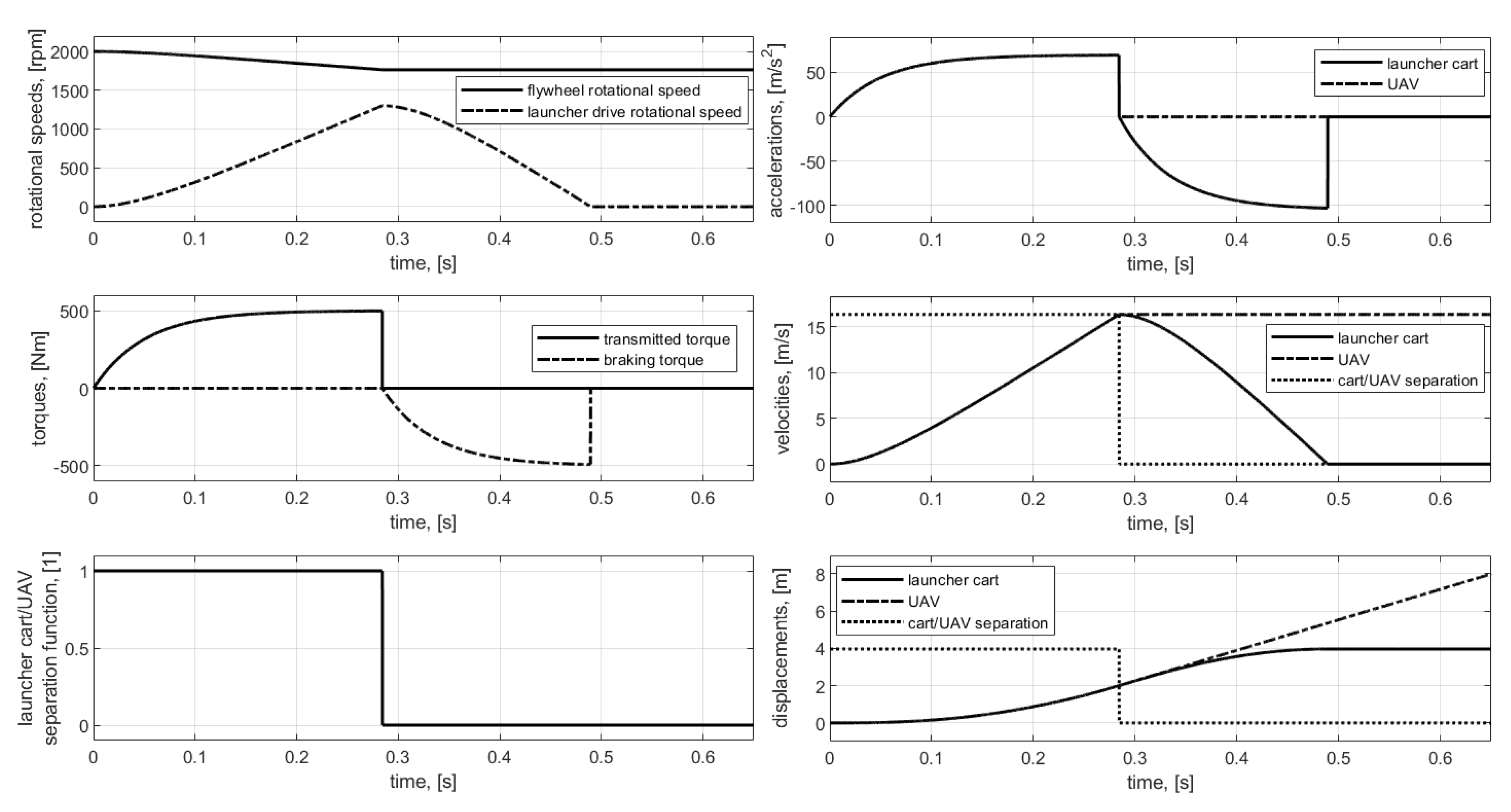
3.1. The 1st Simulation
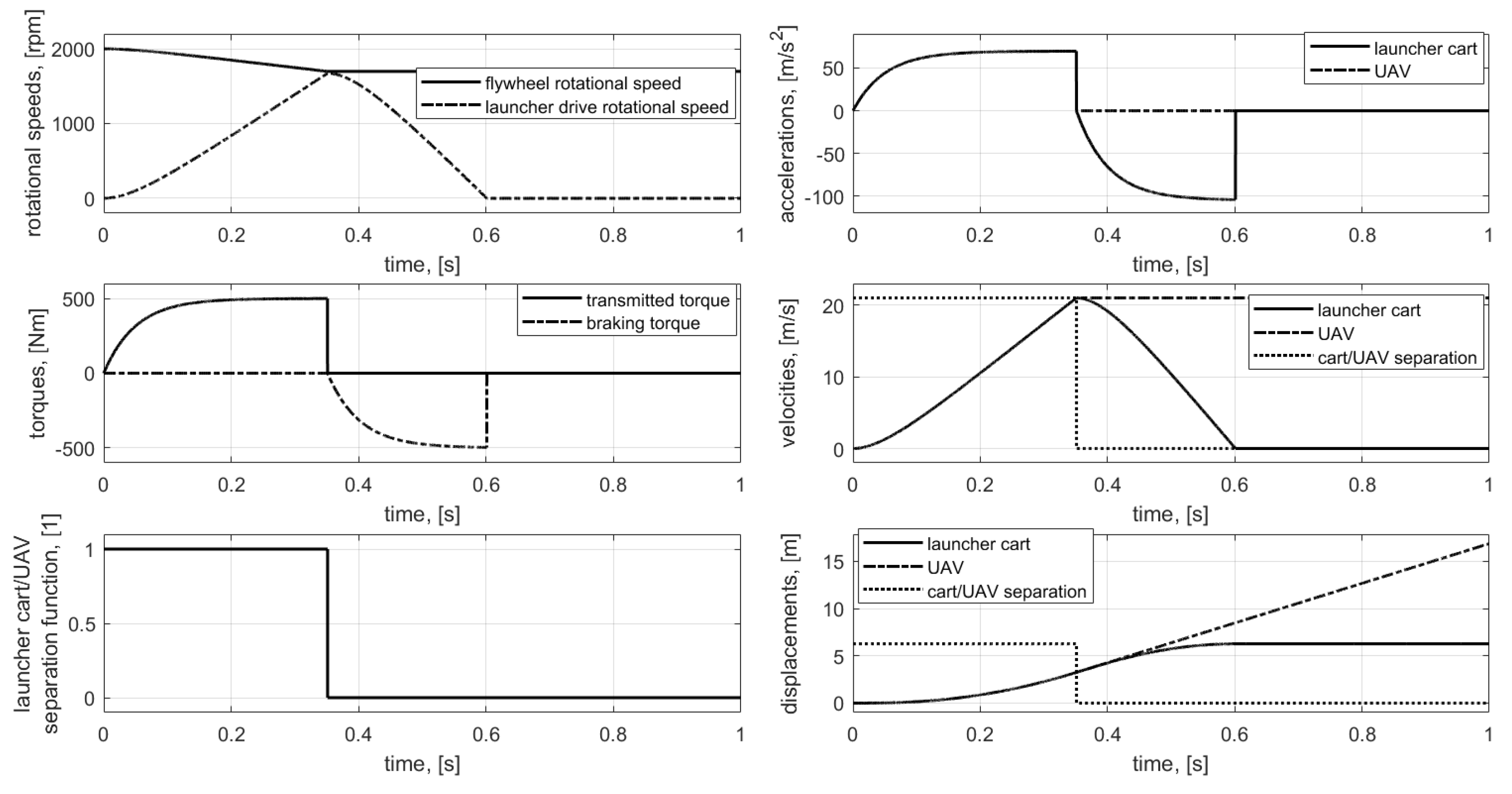
3.2. The 2nd Simulation
3.3. The 3rd Simulation
4. Conclusions
- Simple design that allows to actively control the acceleration and speed of the launched objects;
- Much higher energy density than in the magnetic launchers (the stored energy that can be used is proportional to the square of the rotational speed of the flywheel and can be adjusted for different class of lauded objects);
- A much more compact solution than pneumatic launchers to provide similar performance (no large tank, no compressed air preparation device, no complex valves system);
- Easy scalability for different classes of launched objects.
5. Patents
Author Contributions
Funding
Conflicts of Interest
References
- Buzoganny, L.E.; Pachter, M.; D’azzo, J.J. Automated control of aircraft in formation flight. In Proceedings of the AIAA Guidance—Navigation and Control Conference, Monterey, CA, USA, 9–11 August 1993; pp. 1349–1370. [Google Scholar]
- Pachter, M.; D’Azzo, J.; Dargan, J.L. Automatic formation flight control. J. Guid. Control Dyn. 1994, 17, 1380–1383. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, Z. Formation control: A review and a new consideration. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3181–3186. [Google Scholar]
- Gosiewski, Z.; Ambroziak, L. Formation flight control scheme for unmanned aerial vehicles. Lect. Notes Control Inf. Sci. 2012, 422, 331–340. [Google Scholar]
- Kownacki, C.; Ołdziej, D. Fixed-wing UAVs flock control through cohesion and repulsion behaviours combined with a leadership. Int. J. Adv. Robot. Syst. 2016, 13, 36. [Google Scholar] [CrossRef] [Green Version]
- Kownacki, C.; Ambroziak, L. Local and asymmetrical potential field approach to leader tracking problem in rigid formations of fixed-wing UAVs. Aerosp. Sci. Technol. 2017, 68, 465–474. [Google Scholar] [CrossRef]
- Arjomandi, M.; Agostino, S.; Mammone, M.; Nelson, M.; Zhou, T. Classification of Unmanned Aerial Vehicles; The University of Adelaide: Adelaide, Australia, 2006. [Google Scholar]
- Kondratiuk, M. Designing and Investigating of the Magnetic Coil Launcher With Controlled Acceleration of the Launching Object. Ph.D. Thesis, Bialystok University of Technology, Bialystok, Poland, 2013. (In Polish). [Google Scholar]
- Perkowski, W. Pneumatic launcher for unmanned aerial vehicles. Transp. Eng. 2008, 27, 181. [Google Scholar]
- Kolm, H.; Mongeau, P.; Williams, F. Electromagnetic launchers. IEEE Trans. Magn. 1980, 16, 719–721. [Google Scholar] [CrossRef]
- Patterson, D.; Monti, A.; Brice, C.; Dougal, R.; Pettus, R.; Srinivas, D.; Dilipchandra, K.; Bertoncelli, T. Design and simulation of an electromagnetic aircraft launch system. In Proceedings of the Industry Applications Conference—37th IAS Annual Meeting, Pittsburgh, PA, USA, 13–18 October 2002; pp. 1950–1957. [Google Scholar]
- McNab, I. A research program to study airborne launch to space. IEEE Trans. Magn. 2007, 43, 486–490. [Google Scholar] [CrossRef]
- Ładyżyńska-Kozdraś, E.; Falkowski, K.; Sibilska-Mroziewicz, A. Physical model of cart of UAV catapult using Meissner effect. In PTMTS Monography—Mechanics in Aviation ML-XVI; PTMTS: Warszaw, Poland, 2014; pp. 231–241. (In Polish) [Google Scholar]
- Ładyżyńska-Kozdraś, E.; Falkowski, K.; Sibilska-Mroziewicz, A. Vibration analysis of levitating cart of a magnetic catapult. In PTMTS Monography—Mechanics in Aviation ML-XVI; PTMTS: Warszaw, Poland, 2014; pp. 243–250. (In Polish) [Google Scholar]
- Sibilski, K.; Falkowski, K.; Olejnik, A. Magnetic take-off and landing system of airplanes—Project GABRIEL. In PTMTS Monography—Mechanics in Aviation ML-XVI; PTMTS: Warszaw, Poland, 2014; pp. 216–229. (In Polish) [Google Scholar]
- Guruge, P.; Kocer, B.B.; Kayacan, E. A novel automatic UAV launcher design by using bluetooth low energy integrated electromagnetic releasing system. In Proceedings of the 2015 IEEE Region 10 Humanitarian Technology Conference (R10-HTC), Cebu City, Philippines, 9–12 December 2015; pp. 1–4. [Google Scholar]
- Bhatia, D.K.; Aljadiri, R.T. Electromagnetic UAV launch system. In Proceedings of the 2017 2nd IEEE International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 1–3 September 2017; pp. 280–283. [Google Scholar]
- Yu, Y.; Jun, W. Control strategies for the electromagnetic launcher for UAVs. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 4486–4489. [Google Scholar]
- Kondratiuk, M.; Gosiewski, Z. Simulation Model of an electromagnetic multi-coil launcher for micro aerial vehicles. In Solid State Phenomena—Mechatronic Systems and Materials IV; Trans Tech Publications Ltd.: Zurich, Switzerland, 2013; pp. 406–411. [Google Scholar]
- Kondratiuk, M.; Gosiewski, Z. Laboratory stand of an electromagnetic multi-coil launcher for micro aerial vehicles. In Solid State Phenomena—Mechatronic Systems and Materials IV; Trans Tech Publications Ltd.: Zurich, Switzerland, 2013; pp. 334–339. [Google Scholar]
- Kondratiuk, M.; Gosiewski, Z. Comparison of electromagnetic coil launcher model with real-device characteristics. In Solid State Phenomena; Trans Tech Publications Ltd.: Zurich, Switzerland, 2014; Volume 214, pp. 58–66. [Google Scholar]
- Kondratiuk, M.; Ambroziak, L. Concept of the magnetic launcher for medium class unmanned aerial vehicles designed on the basis of numerical calculations. J. Theor. Appl. Mech. 2016, 54, 163–177. [Google Scholar] [CrossRef]
- Iserman, R. Mechatronic Systems Fundamentals; Springer: London, UK, 2005. [Google Scholar]
- IBD Wickeltechnik GmbH. Electromagnetic Powder Brakes/Clutches. Available online: www.ibd-wt.de/en/products/brakes (accessed on 1 March 2020).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| I | 4.75 | [kgm] |
| 210 | [rad/s] | |
| m | 5 | [kg] |
| m | 20 | [kg] |
| r | 0.12 | [m] |
| I | 0.50 | [kgm] |
| T | 0.05 | [s] |
| T | 0.05 | [s] |
| M | 500 | [Nm] |
| M | 500 | [Nm] |
| 10 | [deg] |
| Parameter | Value | Unit |
|---|---|---|
| b | 1 | Nm/rad/s |
| b | 1.5 | Nm/rad/s |
| b | 0.6 | N/m/s |
| b | 0.5 | N/m/s |
| 0.35 | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kondratiuk, M.; Ambroziak, L. Design and Dynamics of Kinetic Launcher for Unmanned Aerial Vehicles. Appl. Sci. 2020, 10, 2949. https://doi.org/10.3390/app10082949
Kondratiuk M, Ambroziak L. Design and Dynamics of Kinetic Launcher for Unmanned Aerial Vehicles. Applied Sciences. 2020; 10(8):2949. https://doi.org/10.3390/app10082949
Chicago/Turabian StyleKondratiuk, Mirosław, and Leszek Ambroziak. 2020. "Design and Dynamics of Kinetic Launcher for Unmanned Aerial Vehicles" Applied Sciences 10, no. 8: 2949. https://doi.org/10.3390/app10082949
APA StyleKondratiuk, M., & Ambroziak, L. (2020). Design and Dynamics of Kinetic Launcher for Unmanned Aerial Vehicles. Applied Sciences, 10(8), 2949. https://doi.org/10.3390/app10082949