Dynamic Response Analysis of Composite Tether Structure to Airborne Wind Energy System under Impulsive Load

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Concept of a Tailored Tether
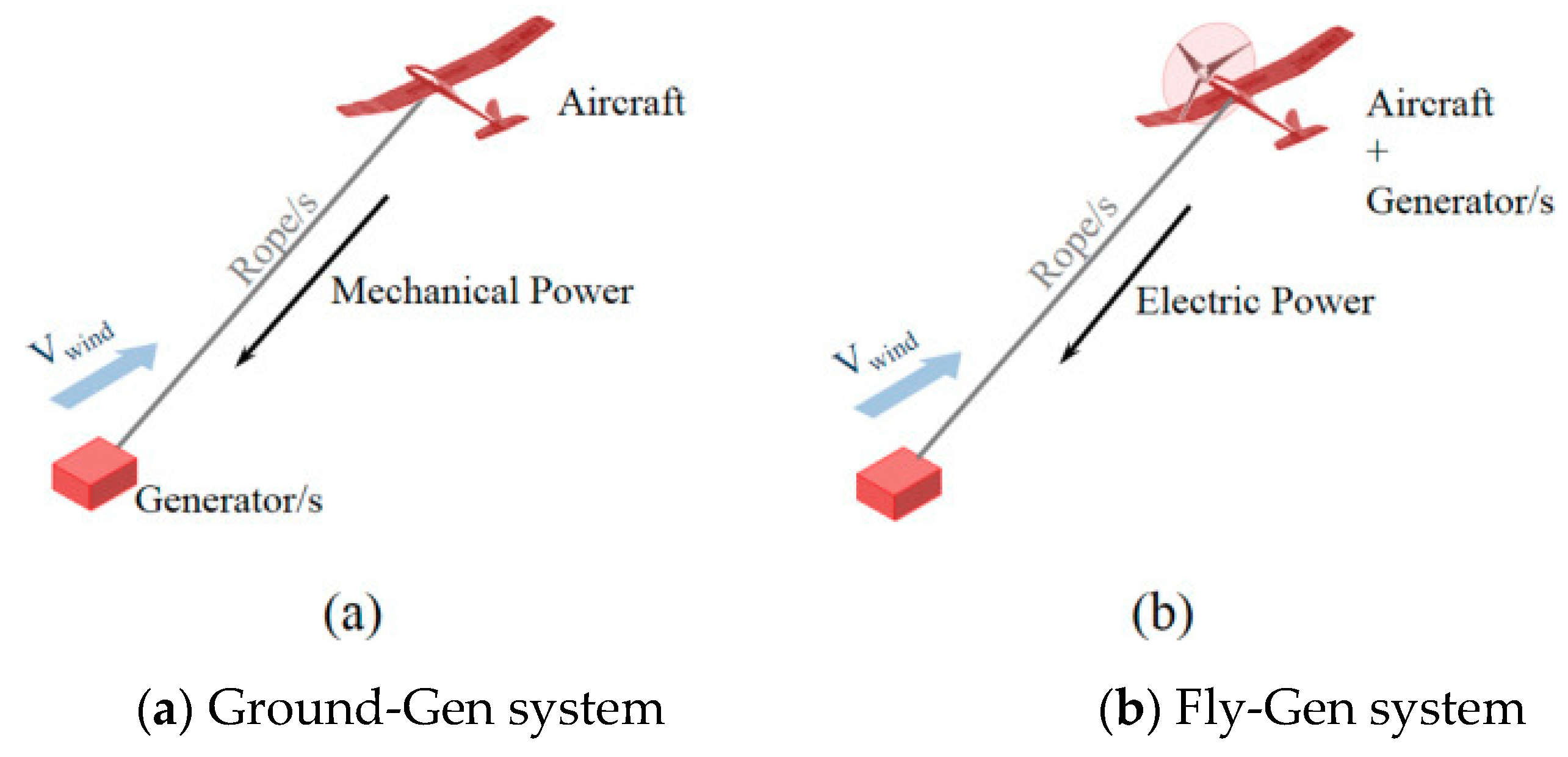
3. Application of a Tailored Tether to AWES
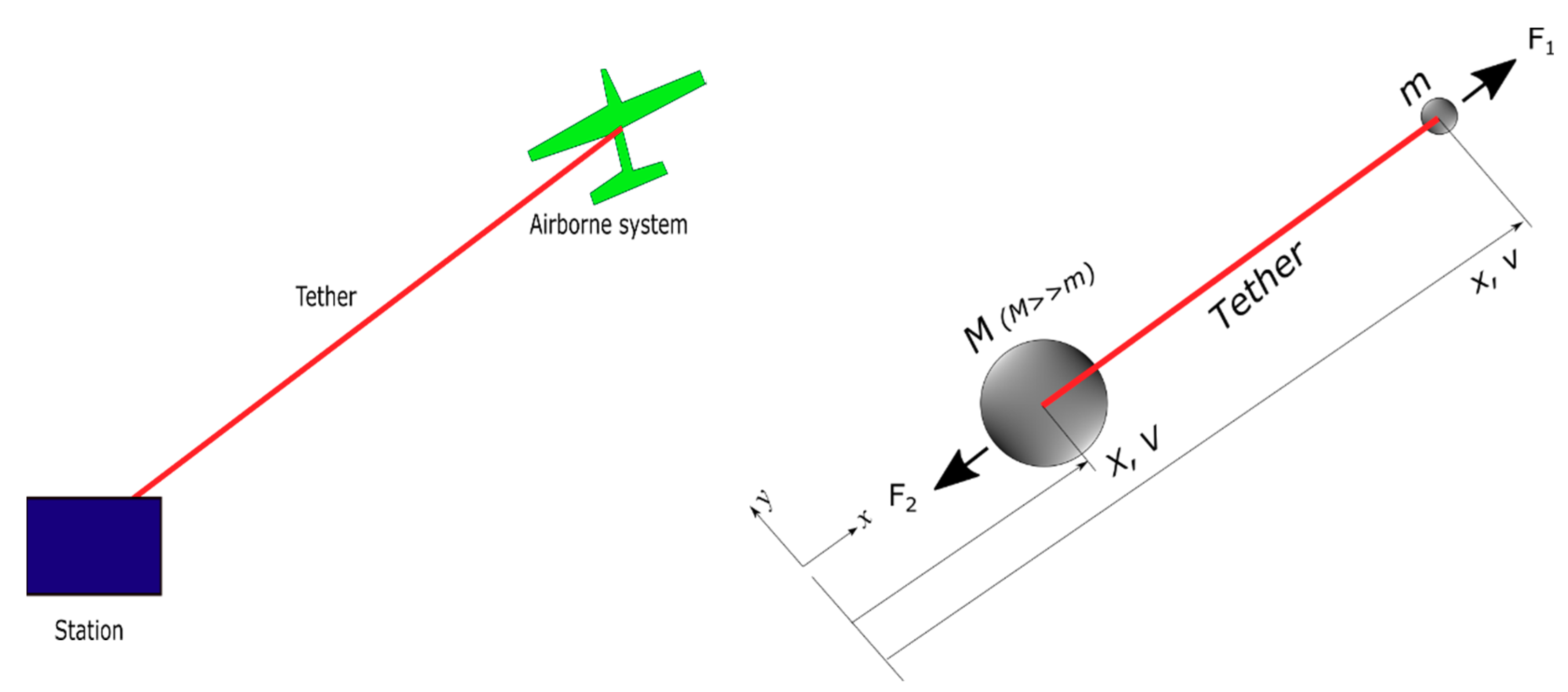
3.1. Simplification of an AWES with a Tailored Structure
3.2. Dynamic Response Model of Simplified AWES Model
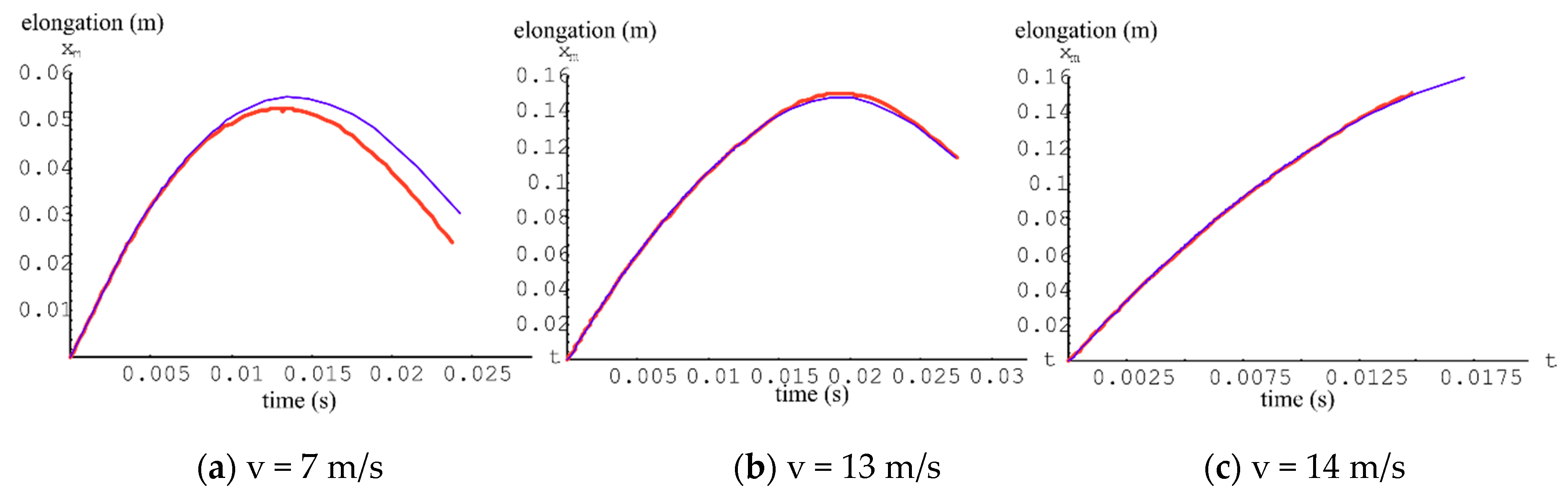
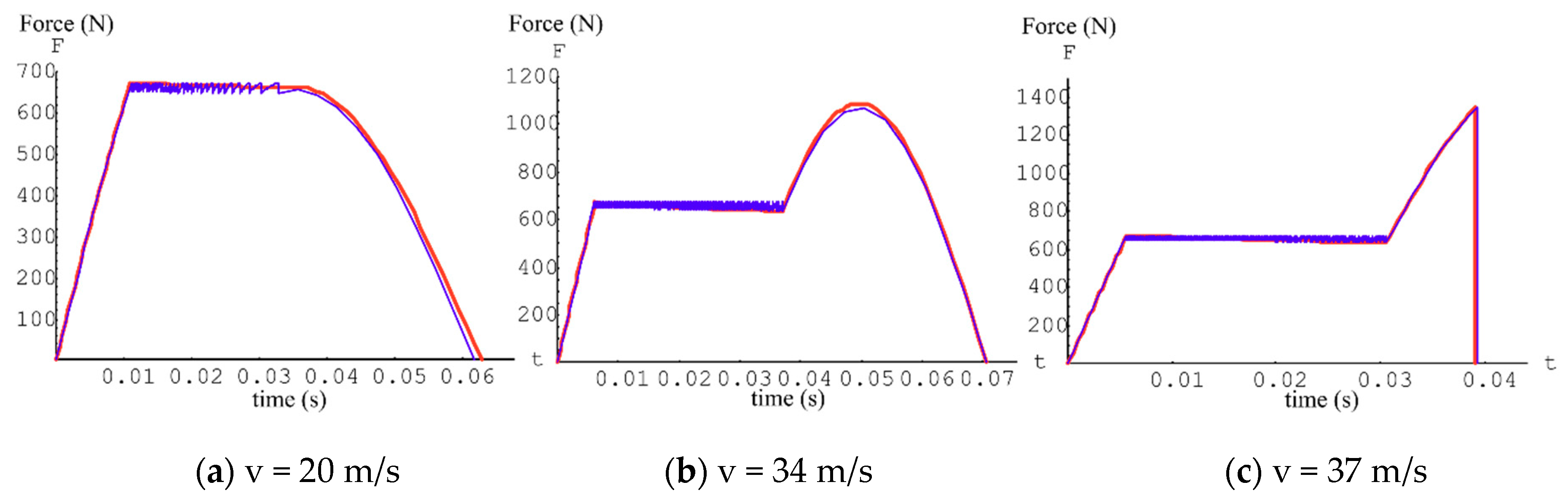
3.3. Approximate Response Modeling of Simplified AWES
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Con sent Statement
Data availability
Acknowledgments
Conflicts of Interest
References
- Handayani, K.; Krozer, Y.; Filatova, T. From fossil fuels to renewables: An analysis of long-term scenarios considering technological learning. Energy Policy 2019, 127, 134–146. [Google Scholar] [CrossRef]
- Herbert, G.M.J.; Iniyan, S.; Sreevalsan, E.; Rajapandian, S. A review of wind energy technologies. Renew. Sustain. Energy Rev. 2007, 11, 1117–1145. [Google Scholar] [CrossRef]
- de Lellis, M.; Reginatto, R.; Saraiva, R.; Trofino, A. The Betz limit applied to airborne wind energy. Renew. Energy 2018, 127, 32–40. [Google Scholar] [CrossRef]
- Konstantinidis, E.I.; Botsaris, P.N. Wind Turbines: Status, obstacles, trends, and technologies. IOP Conf. Ser. Mater. Sci. Eng. 2016, 161, 012079. [Google Scholar] [CrossRef]
- Sirnivas, S.; Musial, W.; Bailey, B.; Filippelli, M. Assessment of Offshore Wind System Design, Safety, and Operation Standards; NREL/TP-5000-60573; National Renewable Energy Laboratory: Golden, CO, USA, 2014. [Google Scholar]
- Korchinski, W. The Limits of Wind Power; Reason Foundation and Cascade Policy Institute: Portland, OR, USA, 2012; Available online: http://cascadepolicy.org/pdf/pub/Oregon_Limits_of_Wind_Power.pdf (accessed on 26 April 2013).
- Diehl, M. Airborne wind energy: Basic concepts and physical foundations. In Airborne Wind Energy. Green Energy and Technology; Ahrens, U., Diehl, M., Schmehl, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Vermillion, C.; Glass, B.; Rein, A. Lighter-than-air wind energy systems. In Airborne Wind Energy. Green Energy and Technology; Ahrens, U., Diehl, M., Schmehl, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Roberts, B.W.; Shepard, D.H.; Caldeira, K.; Cannon, M.E.; Eccles, D.G.; Grenier, A.J.; Freidin, J.F. Harnessing high-altitude wind power. IEEE Trans. Energy Convers. 2007, 22, 136–144. [Google Scholar] [CrossRef] [Green Version]
- Lunney, E.; Ban, M.; Duic, N.; Foley, A. A state-of-the-art review and feasibility analysis of high altitude wind power in Northern Ireland. Renew. Sustain. Energy Rev. 2017, 68, 899–911. [Google Scholar] [CrossRef] [Green Version]
- Ahrens, U.; Diehl, M.; Schmehl, R. Airborne Wind Energy; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Cherubini, A.; Papini, A.; Vertechy, R.; Fontana, M. Airborne wind energy systems: A review of the technologies. Renew. Sustain. Energy Rev. 2015, 51, 1461–1476. [Google Scholar] [CrossRef] [Green Version]
- Argatov, I.; Rautakorpi, P.; Silvennoinen, R. Apparent wind load effects on the tether of a kite power generator. J. Wind Eng. Ind. Aerodyn. 2011, 99, 1079–1088. [Google Scholar] [CrossRef]
- Dunker, S. Tether and Bridle Line Drag in Airborne Wind Energy Applications; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- Salma, V.; Friedl, F.; Schmehl, R. Improving reliability and safety of airborne wind energy systems. Wind Energy 2020, 23, 340–356. [Google Scholar] [CrossRef] [Green Version]
- Dancila, D.S.; Armanios, E.A. Energy-dissipating composite members with progressive failure: Concept development and analytical modeling. AIAA J. 2002, 40, 2096–2104. [Google Scholar] [CrossRef]
- Majak, J.; Hannus, S. Orientational design of anisotropic materials using the hill and tsai–wu strength criteria. Mech. Compos. Mater. 2003, 39, 509–520. [Google Scholar] [CrossRef]
- Lellep, J.; Majak, J. On optimal orientation of nonlinear elastic orthotropic materials. Struct. Optim. 1997, 14, 116–120. [Google Scholar] [CrossRef]
- Dababneh, O.; Kipouros, T.; Whidborne, J.F. Application of an efficient gradient-based optimization strategy for aircraft wing structures. Aerospace 2018, 5, 3. [Google Scholar] [CrossRef] [Green Version]
- Majak, J.; Pohlak, M.; Eerme, M. Design of car frontal protection system using neural networks and genetic algorithm. Mechanika 2012, 18, 453–460. [Google Scholar] [CrossRef] [Green Version]
- Kers, J.; Majak, J.; Goljandin, D.; Gregor, A.; Malmstein, M.; Vilsaar, K. Extremes of apparent and tap densities of recovered GFRP filler materials. Compos. Struct. 2010, 92, 2097–2101. [Google Scholar] [CrossRef]
- Dancila, D.S.; Armanios, E.A. Energy Dissipating Composite Members with Progressive Failure. U.S. Patent No. 6,136,406, 24 October 2000. [Google Scholar]
- Bauchau, O.A. Flexible Multibody Dynamics; Springer: Dordrecht, The Netherlands; Heidelberg, Germany; London, UK; New-York, NY, USA, 2010; ISBN 978-94-007-0334-6. [Google Scholar]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ha, K. Dynamic Response Analysis of Composite Tether Structure to Airborne Wind Energy System under Impulsive Load. Appl. Sci. 2021, 11, 166. https://doi.org/10.3390/app11010166
Ha K. Dynamic Response Analysis of Composite Tether Structure to Airborne Wind Energy System under Impulsive Load. Applied Sciences. 2021; 11(1):166. https://doi.org/10.3390/app11010166
Chicago/Turabian StyleHa, Kwangtae. 2021. "Dynamic Response Analysis of Composite Tether Structure to Airborne Wind Energy System under Impulsive Load" Applied Sciences 11, no. 1: 166. https://doi.org/10.3390/app11010166