
Prediction of Arrival Time of Vessels Considering Future Weather Conditions


Abstract
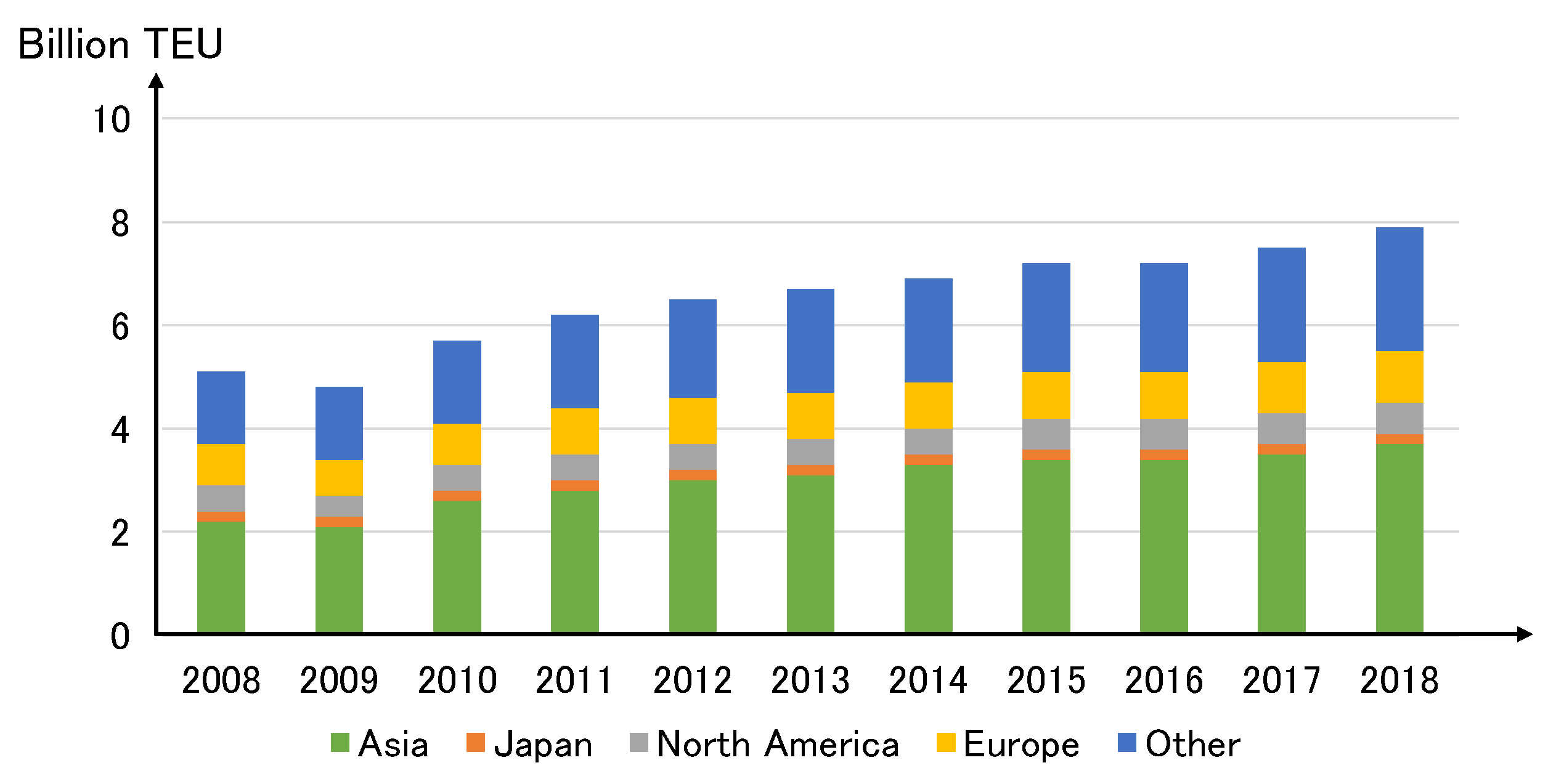
:1. Introduction
2. Previous Studies
2.1. Overview
2.1.1. (A) Route Calculation
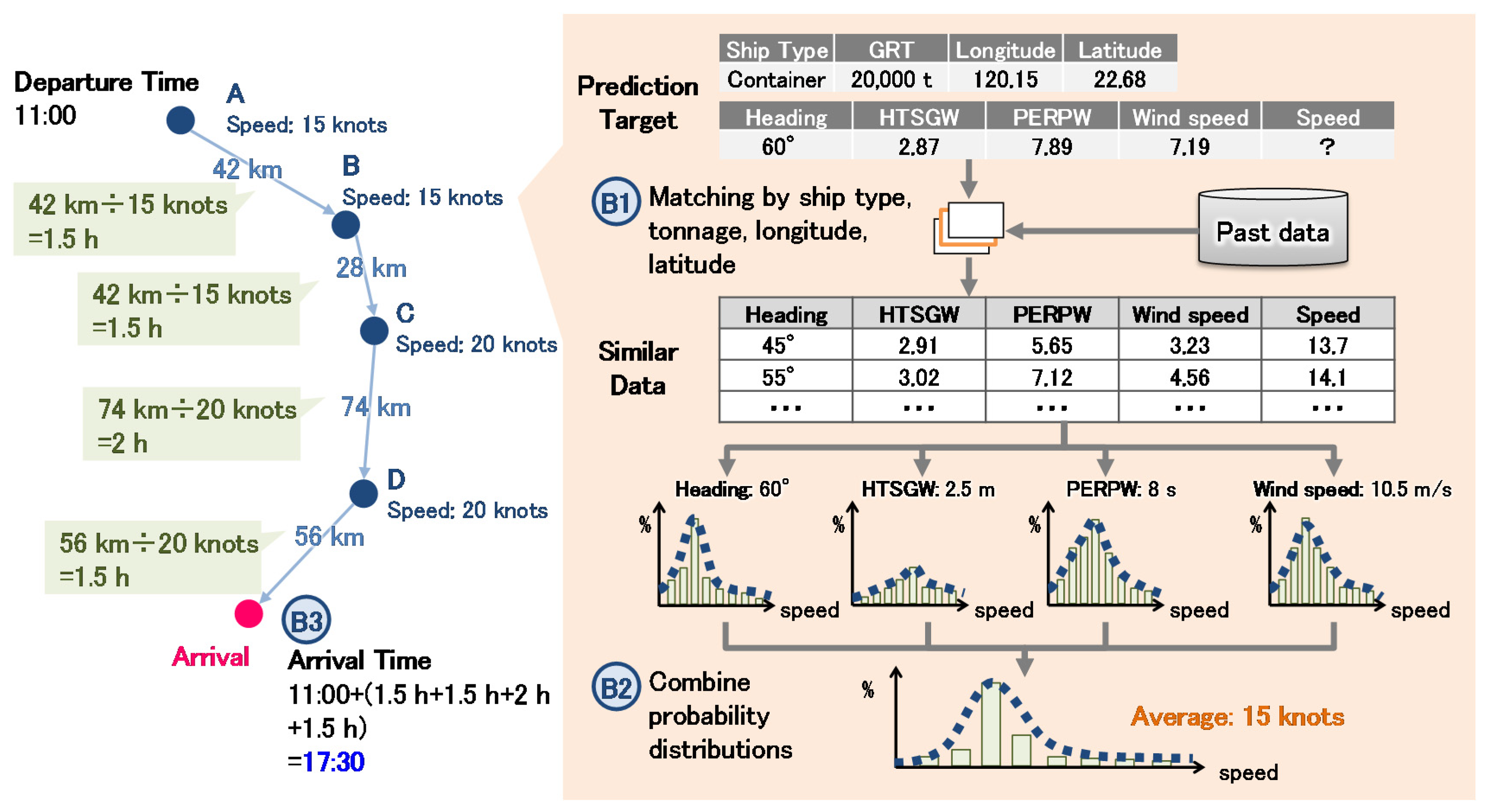
2.1.2. (B) Voyage Speed Calculation
2.2. Issues with Previous Studies
2.2.1. (A) Issues with Route Calculations
2.2.2. (B) Issues with Voyage Speed Calculations
3. Proposed Method
3.1. (A) Route Calculation
| Set of routes extracted in A1 | |
| Set of transit sites along route |
| Route | |
| Transit site |
| Past wave height at a transit site s along route r | |
| Future wave height at a transit site s along route r | |
| Past wave direction at a transit site s along route r | |
| Future wave direction at a transit site s along route r | |
| Past wave period at a transit site s along route r | |
| Future wave period at a transit site s along route r | |
| Past east–west winds at a transit site s along route r | |
| Future east–west winds at a transit site s along route r | |
| Past north–south winds at a transit site s along route r | |
| Future north–south winds at a transit site s along route r |
3.2. (B) Voyage Speed Calculation
| Voyage speed | |
| Bow direction | |
| Wave height | |
| Wave period | |
| Wind speed |
4. Verification of the Prediction Accuracy of the Proposed Method
- TS TOKYO, TS OSAKA
- NEW CENTURY 1, NEW CENTURY 2
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vessel Name | Target Voyage | Departure Time | Arrival Time | Prediction Accuracy | ||||
|---|---|---|---|---|---|---|---|---|
| Departure | Arrival | Actual | Proposed Method | Previous Research | Proposed Method | Previous Research | ||
| TS TOKYO | NAGOYA | YOKOHAMA | 2020/3/22 6:14 | 2020/3/22 22:30 | 2020/3/22 21:08 | 2020/3/23 3:08 | 92% | 71% |
| TS TOKYO | NANSHA | OSAKA | 2020/3/16 4:58 | 2020/3/19 23:14 | 2020/3/20 3:49 | 2020/3/20 6:12 | 95% | 92% |
| TS TOKYO | KOBE | NAGOYA | 2020/3/21 2:48 | 2020/3/21 22:19 | 2020/3/21 19:43 | 2020/3/22 2:40 | 87% | 78% |
| TS TOKYO | TOKYO | KEELUNG | 2020/3/24 6:11 | 2020/3/27 5:40 | 2020/3/27 11:46 | 2020/3/27 18:03 | 91% | 83% |
| TS TOKYO | KEELUNG | TAICHUNG | 2020/3/27 11:52 | 2020/3/27 19:43 | 2020/3/27 20:12 | 2020/3/27 18:32 | 94% | 85% |
| TS TOKYO | TAICHUNG | KAOHSIUNG | 2020/3/28 3:52 | 2020/3/28 12:26 | 2020/3/28 15:13 | 2020/3/28 18:10 | 67% | 33% |
| TS TOKYO | KAOHSIUNG | NANSHA | 2020/3/28 18:38 | 2020/3/30 0:08 | 2020/3/30 5:41 | 2020/3/30 3:01 | 81% | 90% |
| TS TOKYO | LAEM CHABANG | HONG KONG | 2020/4/9 5:32 | 2020/4/13 4:33 | 2020/4/13 5:27 | 2020/4/12 22:31 | 99% | 94% |
| TS TOKYO | NANSHA | OSAKA | 2020/4/14 10:24 | 2020/4/17 23:06 | 2020/4/18 7:44 | 2020/4/18 11:50 | 90% | 85% |
| TS TOKYO | KEELUNG | TAICHUNG | 2020/5/20 9:44 | 2020/5/20 17:05 | 2020/5/20 16:48 | 2020/5/20 16:24 | 96% | 91% |
| TS TOKYO | TAICHUNG | KAOHSIUNG | 2020/5/20 22:46 | 2020/5/21 7:16 | 2020/5/21 9:36 | 2020/5/21 13:04 | 72% | 32% |
| TS TOKYO | KAOHSIUNG | NANSHA | 2020/5/21 15:35 | 2020/5/23 1:54 | 2020/5/22 22:26 | 2020/5/22 23:58 | 90% | 94% |
| APL PUSAN | NAGOYA | KOBE | 2020/4/1 15:27 | 2020/4/2 22:11 | 2020/4/2 8:38 | 2020/4/2 9:57 | 56% | 60% |
| APL PUSAN | NAGOYA | KOBE | 2020/4/29 6:27 | 2020/4/30 22:04 | 2020/4/29 23:19 | 2020/4/30 0:57 | 43% | 47% |
| HORAI BRIDGE | HONGKONG | KAOHSIUNG | 2020/4/6 21:48 | 2020/4/7 21:08 | 2020/4/7 22:01 | 2020/4/8 12:55 | 96% | 32% |
| APL JEDDAH | KAOHSIUNG | YOKOHAMA | 2020/5/1 6:30 | 2020/5/4 21:39 | 2020/5/4 17:47 | 2020/5/5 9:29 | 96% | 86% |
| APL JEDDAH | TOKYO | NAGOYA | 2020/5/5 20:10 | 2020/5/6 10:23 | 2020/5/6 13:57 | 2020/5/6 19:35 | 75% | 35% |
| APL JEDDAH | NAGOYA | KOBE | 2020/5/6 20:18 | 2020/5/7 21:51 | 2020/5/7 13:26 | 2020/5/7 14:48 | 67% | 72% |
| WHITE DRAGON | HONGKONG | KAOHSIUNG | 2020/5/11 9:49 | 2020/5/12 11:55 | 2020/5/12 10:02 | 2020/5/13 0:56 | 93% | 50% |
| TS OSAKA | KOBE | NAGOYA | 2020/5/21 6:17 | 2020/5/22 4:29 | 2020/5/21 23:06 | 2020/5/22 6:09 | 76% | 92% |
| TS OSAKA | NAGOYA | YOKOHAMA | 2020/5/22 13:33 | 2020/5/23 1:44 | 2020/5/23 5:07 | 2020/5/23 10:27 | 72% | 28% |
| TS OSAKA | TOKYO | KEELUNG | 2020/5/23 20:15 | 2020/5/26 23:13 | 2020/5/26 19:53 | 2020/5/27 8:07 | 96% | 88% |
| TS OSAKA | TAICHUNG | KAOHSIUNG | 2020/5/28 2:49 | 2020/5/28 11:47 | 2020/5/28 13:39 | 2020/5/28 17:07 | 79% | 40% |
| TS OSAKA | KAOHSIUNG | NANSHA | 2020/5/28 21:41 | 2020/5/30 4:36 | 2020/5/30 5:40 | 2020/5/30 6:04 | 97% | 95% |
| TS KAOHSIUNG | KOBE | NAGOYA | 2020/6/5 5:20 | 2020/6/5 22:09 | 2020/6/5 22:14 | 2020/6/6 5:12 | 99% | 58% |
| TS KAOHSIUNG | NAGOYA | YOKOHAMA | 2020/6/6 7:11 | 2020/6/6 22:03 | 2020/6/6 22:42 | 2020/6/7 4:05 | 96% | 59% |
| TS KAOHSIUNG | TOKYO | KEELUNG | 2020/6/8 3:40 | 2020/6/11 4:23 | 2020/6/11 3:14 | 2020/6/11 15:32 | 98% | 85% |
| TS KAOHSIUNG | KEELUNG | TAICHUNG | 2020/6/11 11:13 | 2020/6/11 18:21 | 2020/6/11 19:11 | 2020/6/11 17:53 | 88% | 94% |
| TS KAOHSIUNG | TAICHUNG | KAOHSIUNG | 2020/6/12 0:30 | 2020/6/12 9:05 | 2020/6/12 10:25 | 2020/6/12 14:48 | 84% | 33% |
| TS KAOHSIUNG | KAOHSIUNG | NANSHA | 2020/6/12 19:11 | 2020/6/14 9:05 | 2020/6/14 0:13 | 2020/6/14 3:34 | 77% | 85% |
References
- Regional Trade Agreements DataBase. Available online: http://rtais.wto.org/UI/PublicMaintainRTAHome.aspx (accessed on 12 January 2021).
- Cross-Border B2C E-Commerce Market. Available online: https://www.zionmarketresearch.com/report/cross-border-b2c-e-commerce-market (accessed on 12 January 2021).
- Container Port Traffic (TEU: 20 Foot Equivalent Units). Available online: https://data.worldbank.org/indicator/IS.SHP.GOOD.TU (accessed on 12 January 2021).
- Pallotta, G.; Vespe, M.; Bryan, L. Vessel pattern knowledge discovery from AIS data: A framework for anomaly detection and route prediction. Entropy 2013, 15, 2218–2245. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Ji, M.; Feng, B. Smarter supply chain: A literature review and practices. J. DataInf. Manag. 2020, 2, 95–110. [Google Scholar] [CrossRef] [Green Version]
- Alessandrini, A.; Mazzarella, F.; Vespe, M. Estimated time of arrival using historical vessel tracking data. IEEE Trans. Intell. Transp. Syst. 2019, 20, 7–15. [Google Scholar] [CrossRef]
- Technical Characteristics for an Automatic Identification System Using Time Division Multiple Access in the VHF Maritime Mobile Frequency. Available online: http://www.itu.int/dms_pubrec/itu-r/rec/m/R-REC-M.1371-5-201402-I!!PDF-E.pdf (accessed on 12 January 2021).
- Marine Traffic. Available online: https://www.marinetraffic.com (accessed on 12 January 2021).
- Christiansen, M.; Fagerholt, K.; Nygreen, B.; Ronen, D. Ship routing and scheduling in the new millennium. Eur. J. Oper. Res. 2013, 228, 467–483. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, Y.; Li, J.; Liu, L.; Ma, J.; Zhong, Y. Airport arrival flow prediction considering meteorological factors based on deep-learning methods. Hindawi Complex. 2020. [Google Scholar] [CrossRef]
- Roy, K.; Levy, B.; Tomlin, C. Target tracking and estimated time of arrival (ETA) prediction for arrival aircraft. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Colorado, CO, USA, 21–24 August 2006; pp. 1–22. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connection with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Shin, Y.W.; Abebe, M.; Noh, Y.; Lee, S.; Lee, I.; Kim, D.; Bae, J.; Kim, K.C. Near-optimal weather routing by using improved A* algorithm. Appl. Sci. 2020, 10, 6010. [Google Scholar] [CrossRef]
- Pennino, S.; Gaglione, S.; Innac, A.; Piscopo, V.; Scamardella, A. Development of a new ship adaptive weather routing model based on seakeeping analysis and optimization. J. Mar. Sci. Eng. 2020, 8, 270. [Google Scholar] [CrossRef]
- Liu, J.; Shi, G.; Zhu, K. Vessel trajectory prediction model based on ais sensor data and adaptive chaos diffrential evolution support vector regression (ACDE-SVR). Appl. Sci. 2019, 9, 2983. [Google Scholar] [CrossRef] [Green Version]
- Dimitrios, Z.; Elias, X.; Dimitrios, L. Real-time vessel behavior prediction. Evol. Syst. 2016, 7, 29–40. [Google Scholar]
- Yu, J.; Tang, G.; Song, X.; Yu, X.; Qi, Y.; Li, D.; Zhang, Y. Ship arrival prediction and its value on daily container terminal operation. Ocean Eng. 2018, 157, 73–86. [Google Scholar] [CrossRef]
- Szelangiewicz, T.; Żelazny, K. Mathmatical model for predicting the ship speed in the actual weather conditions on the planed ocean route. New Trends Prod. Eng. 2018, 1, 5–112. [Google Scholar]
- Lu, R.; Turan, O.; Boulougouris, E. Voyage optimisation: Prediction of ship specific fuel consumption for energy efficient shipping. In Proceedings of the Low Carbon Shipping Conference, London, UK, 9–10 September 2013; pp. 1–11. [Google Scholar]
- Fujii, M.; Hashimoto, H.; Taniguchi, Y. Analysis of satellite AIS data to derive weather judging criteria for voyage route selection. Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 271–277. [Google Scholar] [CrossRef] [Green Version]
- Hayashi, M.; Ishida, H. Characteristic analysis of weather routing by practical navigators. In Proceedings of the IEEE International Conference of Systems, Man and Cybernetics, Taiwan, China, 8–11 October 2006; pp. 786–790. [Google Scholar]
- Bishop, C. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006; ISBN 978-0-387-31073-2. [Google Scholar]
- Technical Note of National Institute for Land and Infrastructure Management. Available online: http://www.ysk.nilim.go.jp/kenkyuseika/pdf/ks0991.pdf (accessed on 14 January 2021).
- Research Institute for Sustanable Humanosphere, Kyoto University. Available online: http://database.rish.kyoto-u.ac.jp/arch/jmadata/gpv-original.html (accessed on 12 January 2021).







| Vessel Name | Departure Port | Arrival Port | Departure Time |
|---|---|---|---|
| TS TOKYO | KOBE | NAGOYA | 2020/4/18 16:44 |
| NAGOYA | YOKOHAMA | 2020/4/19 17:48 | |
| TOKYO | KEELUNG | 2020/4/22 10:24 | |
| KEELUNG | TAICHUNG | 2020/4/25 18:32 | |
| TS OSAKA | KOBE | NAGOYA | 2020/4/23 11:18 |
| NAGOYA | YOKOHAMA | 2020/4/24 12:08 | |
| TOKYO | KEELUNG | 2020/4/26 2:23 | |
| KEELUNG | TAICHUNG | 2020/4/29 11:30 | |
| NEW CENTURY 1 | TOYOHASHI | LONG BEACH | 2020/8/8 10:18 |
| NEW CENTURY 2 | 2020/7/30 10:08 |
| Mmsi | Speed | Lon | Lat | Course | Heading | Timestamp | Htsgw | Perpw | Dirpw | Ugrd | Vgrd |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 538007662 | 164 | 136.938 | 34.61643 | 315 | 315 | 2019/1/1 0:01 | 1.05 | 5.10 | 320 | 4.81 | −4.45 |
| 538007662 | 173 | 136.7697 | 34.85543 | 0 | 359 | 2019/1/1 1:00 | 0 | 0 | −10 | 1.52 | −1.91 |
| 538007662 | 0 | 136.7413 | 34.97633 | 9 | 339 | 2019/1/1 1:59 | 0 | 0 | −10 | 2.01 | −0.381 |
| Column Name | Meaning |
|---|---|
| MMSI | Maritime Mobile Service Identity |
| SPEED | Voyage speed of transit site |
| LON | Longitude of transit site |
| LAT | Latitude of transit site |
| COURSE | Voyage direction at transit site |
| HEADING | Vessel direction at transit site |
| TIMESTAMP | Passing time as transit site |
| HTSGW | Significant wave height |
| PERPW | Primary wave mean period |
| DIRPW | Primary wave direction |
| UGRD | North–south wind component |
| VGRD | East–west wind component |
| Vessel Name | Target Voyage | Arrival Time | Prediction Accuracy | ||||
|---|---|---|---|---|---|---|---|
| Departure | Arrival | Actual | Proposed Method | Previous Research | Proposed Method | Previous Research | |
| TS TOKYO | KOBE | NAGOYA | 2020/4/19 8:57 | 2020/4/19 10:56 | 2020/4/19 16:35 | 88% (2 h) | 53% (7.7 h) |
| NAGOYA | YOKOHAMA | 2020/4/20 8:38 | 2020/4/20 8:16 | 2020/4/20 14:42 | 98% (–0.4 h) | 59% (6.1 h) | |
| TOKYO | KEELUNG | 2020/4/25 10:28 | 2020/4/25 14:19 | 2020/4/25 21:55 | 95% (3.9 h) | 84% (11.5 h) | |
| KEELUNG | TAICHUNG | 2020/4/26 2:03 | 2020/4/26 2:06 | 2020/4/26 1:12 | 99% (0.1 h) | 89% (–0.8 h) | |
| TS OSAKA | KOBE | NAGOYA | 2020/4/24 2:41 | 2020/4/24 5:30 | 2020/4/24 11:10 | 82% (2.8 h) | 45% (8.5 h) |
| NAGOYA | YOKOHAMA | 2020/4/25 1:13 | 2020/4/25 3:59 | 2020/4/25 9:02 | 79% (2.8 h) | 40% (7.8 h) | |
| TOKYO | KEELUNG | 2020/4/28 23:28 | 2020/4/29 4:02 | 2020/4/29 13:54 | 93% (4.6 h) | 79% (14.4 h) | |
| KEELUNG | TAICHUNG | 2020/4/29 22:57 | 2020/4/29 19:38 | 2020/4/29 18:10 | 71% (–3.3 h) | 58% (–4.8 h) | |
| NEW CENTURY 1 | TOYOHASHI | LONG BEACH | 2020/8/21 6:12 | 2020/8/21 7:54 | 2020/8/26 13:55 | 99% (2.3 h) | 59% (127.7 h) |
| NEW CENTURY 2 | 2020/8/12 6:04 | 2020/8/12 8:22 | 2020/8/17 13:45 | 99% (1.7 h) | 50% (127.7 h) | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ogura, T.; Inoue, T.; Uchihira, N. Prediction of Arrival Time of Vessels Considering Future Weather Conditions. Appl. Sci. 2021, 11, 4410. https://doi.org/10.3390/app11104410
Ogura T, Inoue T, Uchihira N. Prediction of Arrival Time of Vessels Considering Future Weather Conditions. Applied Sciences. 2021; 11(10):4410. https://doi.org/10.3390/app11104410
Chicago/Turabian StyleOgura, Takahiro, Teppei Inoue, and Naoshi Uchihira. 2021. "Prediction of Arrival Time of Vessels Considering Future Weather Conditions" Applied Sciences 11, no. 10: 4410. https://doi.org/10.3390/app11104410