
Assessment of the Impact of Electric Vehicle Batteries in the Non-Linear Control of DC Microgrids



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Background: Non-Linear Control of DC Microgrid
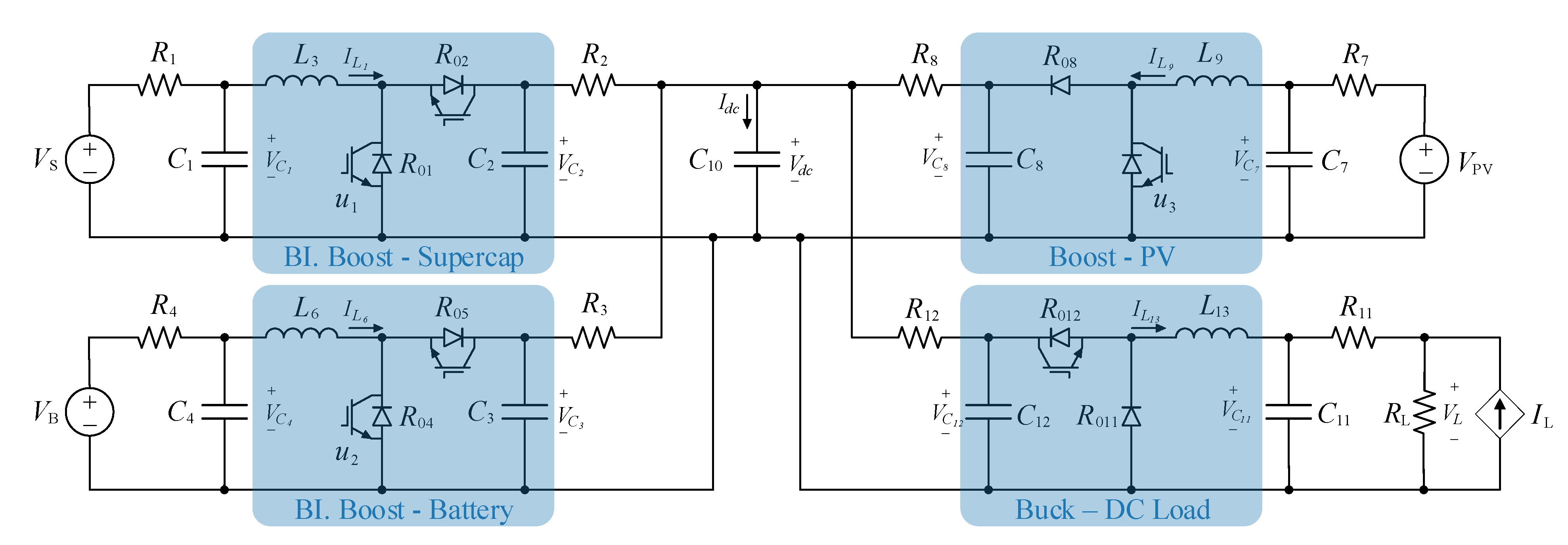
2.1. Assumed Microgrid Configuration
2.2. Non-Linear Control
2.3. Control of
2.4. Current Control
2.4.1. Control of
2.4.2. Control of
2.5. Control of and
3. Methodology
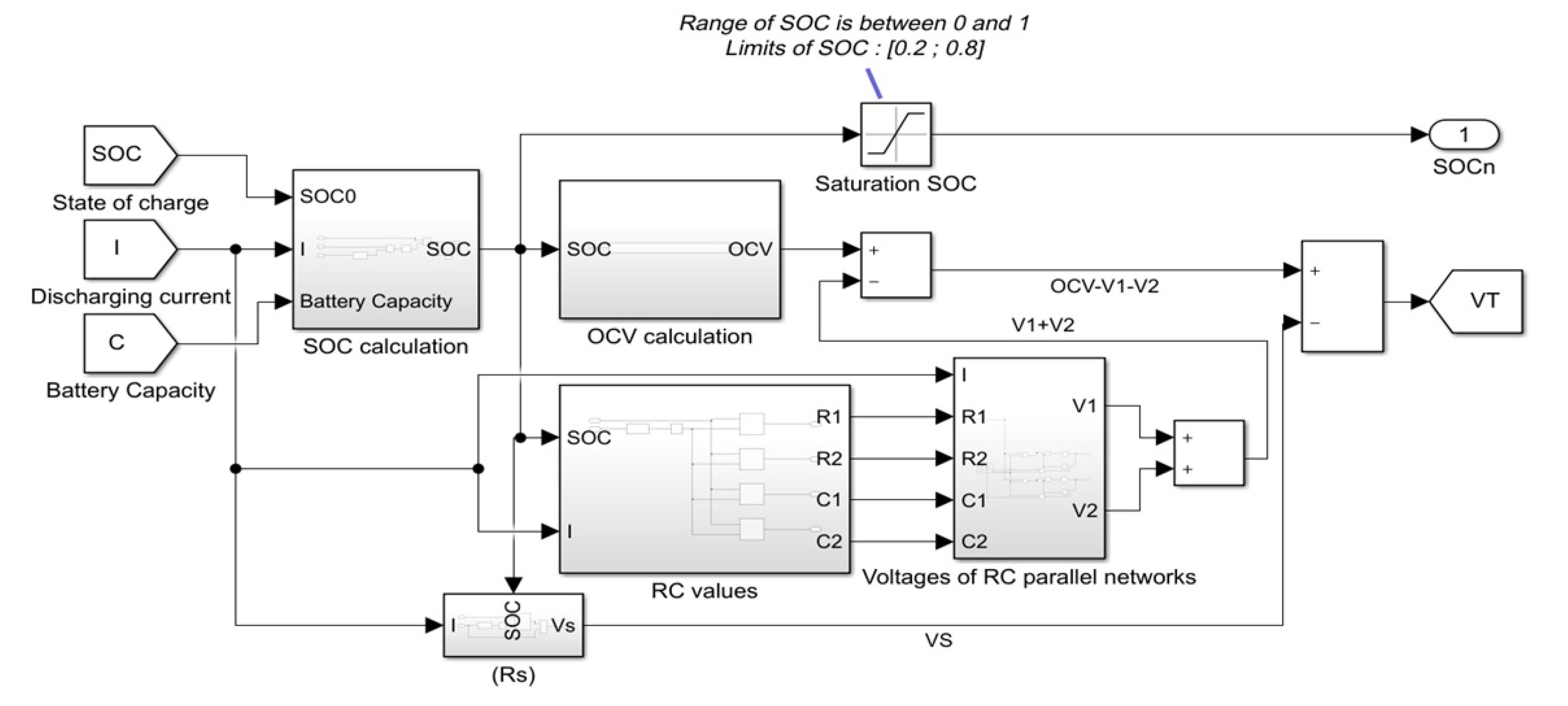
3.1. Modeling of a Battery Cell
3.1.1. Open Circuit Voltage Calculation
3.1.2. Calculation
3.1.3. RC Values
3.1.4. Voltage of RC Parallel Network
3.1.5. Voltage of the Series Resistors
3.1.6. The Cell Output Voltage
3.2. Modeling of a Battery Pack
3.3. Charging the Battery Pack on a DC Microgrid
3.3.1. The Microgrid Model
3.3.2. The Battery Pack Connection
3.4. EV Charging Control
4. Results and Discussion
4.1. Simulation of a Battery Cell
4.2. Simulation of a Battery Pack
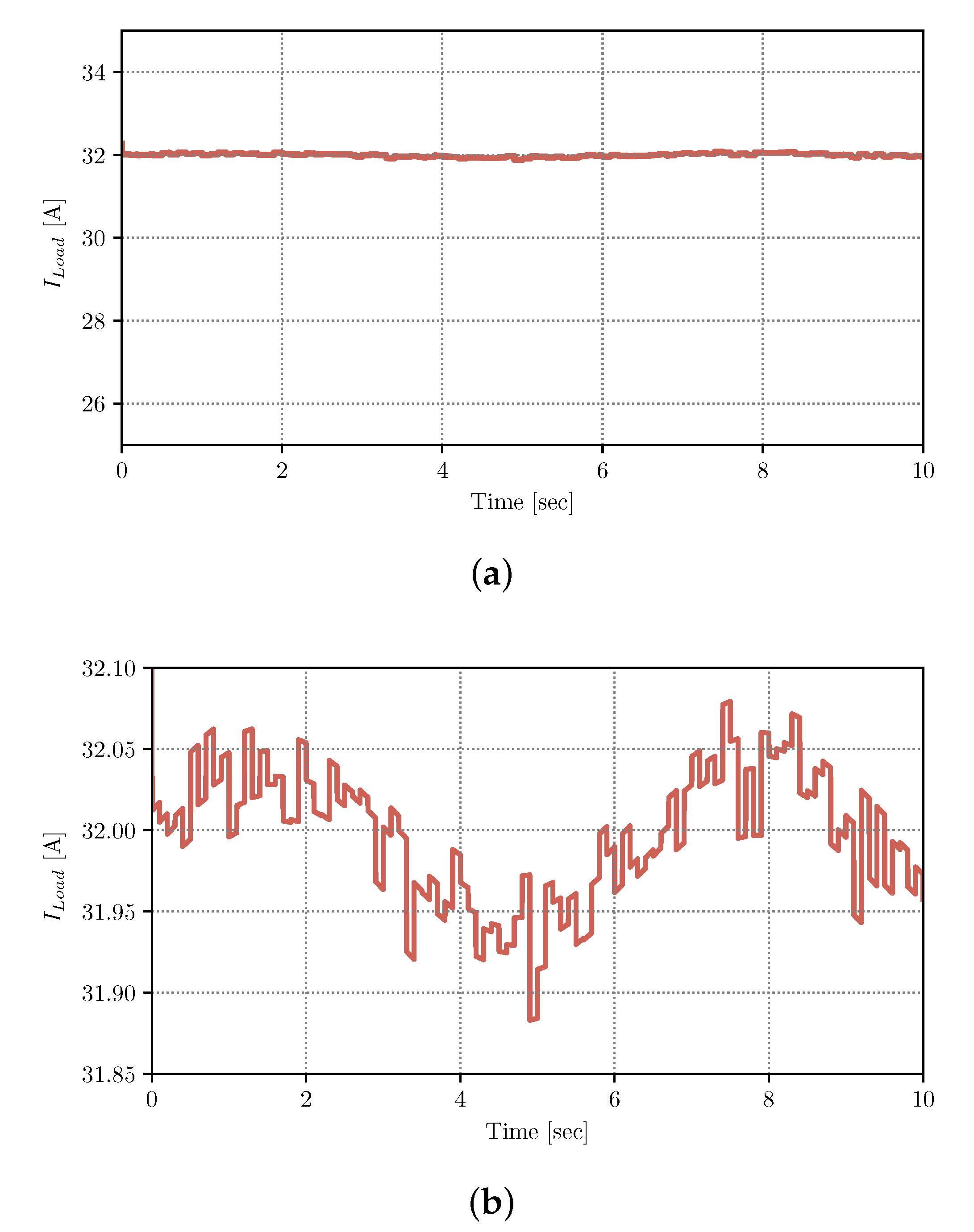
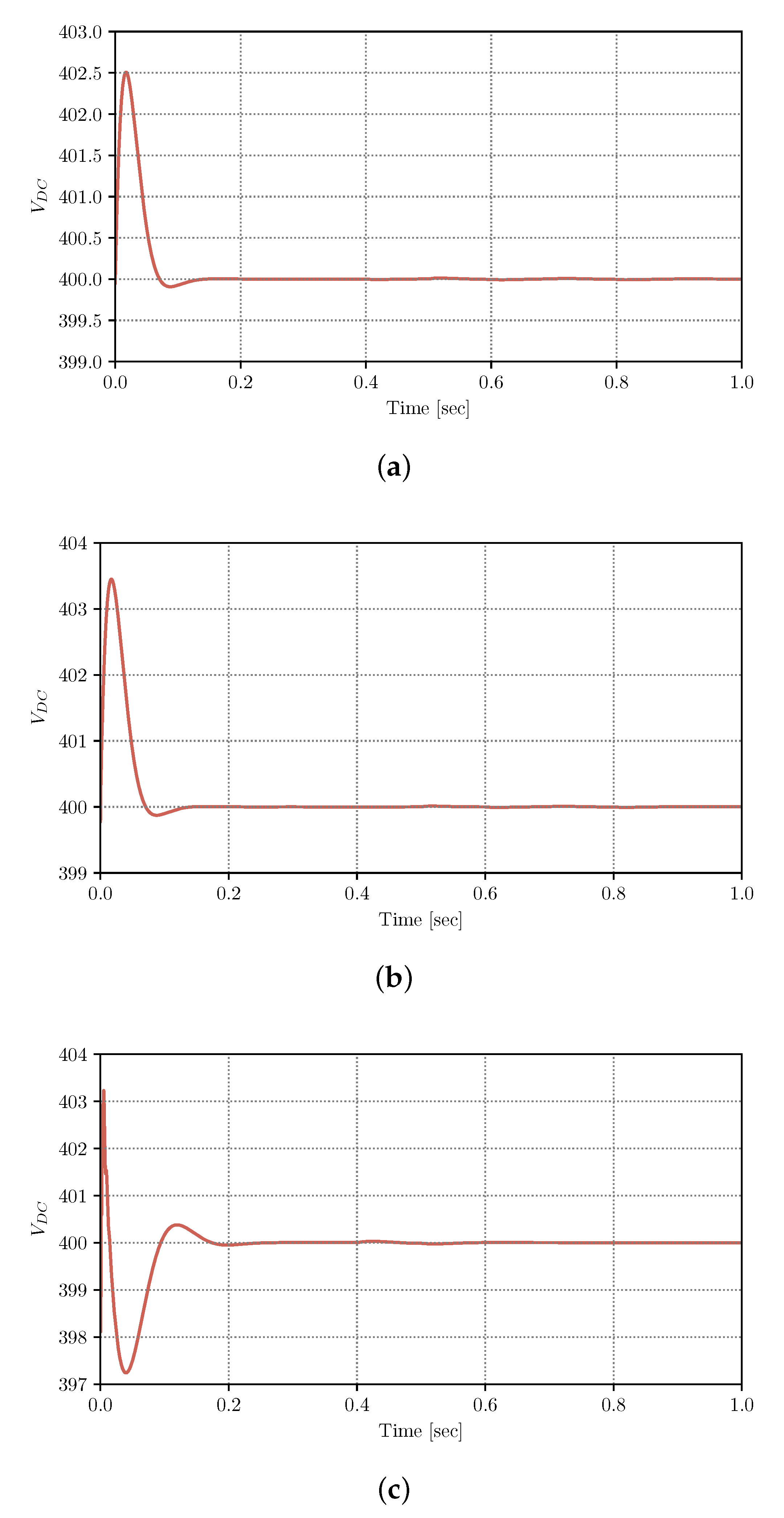
4.3. Integration of the Battery in Microgrid
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CO | Carbon dioxide |
| DG | Distributed Generation |
| ESS | Energy Storage System |
| EV | Electric Vehicle |
| RE | Renewable Energy |
| PCC | Point of Common Coupling |
| PI | Proportional integral |
| PV | Photovoltaic |
| V2G | Vehicle-to-Grid |
| SOC | State-of-Charge |
References
- Lotfi, H.; Khodaei, A. AC versus DC microgrid planning. IEEE Trans. Smart Grid 2017, 8, 296–304. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Dragicevic, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part I: A Review of Control Strategies and Stabilization Techniques. IEEE Trans. Power Electron. 2016, 31, 4876–4891. [Google Scholar] [CrossRef] [Green Version]
- Justo, J.J.; Mwasilu, F.; Lee, J.; Jung, J.W. AC-microgrids versus DC-microgrids with distributed energy resources: A review. Renew. Sustain. Energy Rev. 2013, 24, 387–405. [Google Scholar] [CrossRef]
- Sanjeev, P.; Padhy, N.P.; Agarwal, P. Peak energy management using renewable integrated DC microgrid. IEEE Trans. Smart Grid 2018, 9, 4906–4917. [Google Scholar] [CrossRef]
- Liu, J.; Lu, X.; Wang, J. Resilience Analysis of DC Microgrids Under Denial of Service Threats. IEEE Trans. Power Syst. 2019, 34, 3199–3208. [Google Scholar] [CrossRef]
- Dragičević, T.; Lu, X.; Vasquez, J.C.; Guerrero, J.M. DC Microgrids—Part II: A Review of Power Architectures, Applications, and Standardization Issues. IEEE Trans. Power Electron. 2016, 31, 3528–3549. [Google Scholar] [CrossRef] [Green Version]
- Ghiasi, M.I.; Golkar, M.A.; Hajizadeh, A. Lyapunov Based-Distributed Fuzzy-Sliding Mode Control for Building Integrated-DC Microgrid with Plug-In Electric Vehicle. IEEE Access 2017, 5, 7746–7752. [Google Scholar] [CrossRef]
- Aluisio, B.; Bruno, S.; De Bellis, L.; Dicorato, M.; Forte, G.; Trovato, M. DC-Microgrid operation planning for an electric vehicle supply infrastructure. Appl. Sci. 2019, 9, 2687. [Google Scholar] [CrossRef] [Green Version]
- Travaillé, P.; Benamar, A.; Clairand, J.M.; Escrivá-Escrivá, G. Operation of DC Microgrids Considering Different Strategies of Electric Vehicle Charging. In Proceedings of the 2020 IEEE ANDESCON, Quito, Ecuador, 13–16 October 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Farrokhabadi, M.; Konig, S.; Canizares, C.A.; Bhattacharya, K.; Leibfried, T. Battery Energy Storage System Models for Microgrid Stability Analysis and Dynamic Simulation. IEEE Trans. Power Syst. 2018, 33, 2301–2312. [Google Scholar] [CrossRef]
- Zia, M.F.; Elbouchikhi, E.; Benbouzid, M. Optimal operational planning of scalable DC microgrid with demand response, islanding, and battery degradation cost considerations. Appl. Energy 2019, 237, 695–707. [Google Scholar] [CrossRef]
- Ceraolo, M. New dynamical models of lead-acid batteries. IEEE Trans. Power Syst. 2000, 15, 1184–1190. [Google Scholar] [CrossRef] [Green Version]
- Kim, G.H.; Pesaran, A.; Spotnitz, R. A three-dimensional thermal abuse model for lithium-ion cells. J. Power Sources 2007, 170, 476–489. [Google Scholar] [CrossRef]
- Tremblay, O.; Dessaint, L.A.; Dekkiche, A.I. A generic battery model for the dynamic simulation of hybrid electric vehicles. In Proceedings of the 2007 IEEE Vehicle Power and Propulsion Conference, Arlington, TX, USA, 9–12 September 2007; pp. 284–289. [Google Scholar]
- Motapon, S.N.; Lupien-Bedard, A.; Dessaint, L.A.; Fortin-Blanchette, H.; Al-Haddad, K. A Generic Electrothermal Li-ion Battery Model for Rapid Evaluation of Cell Temperature Temporal Evolution. IEEE Trans. Ind. Electron. 2017, 64, 998–1008. [Google Scholar] [CrossRef]
- Cicconi, P.; Landi, D.; Germani, M. Thermal analysis and simulation of a Li-ion battery pack for a lightweight commercial EV. Appl. Energy 2017, 192, 159–177. [Google Scholar] [CrossRef]
- Berrueta, A.; Urtasun, A.; Ursúa, A.; Sanchis, P. A comprehensive model for lithium-ion batteries: From the physical principles to an electrical model. Energy 2018, 144, 286–300. [Google Scholar] [CrossRef] [Green Version]
- Khan, A.B.; Choi, W. Optimal Charge Pattern for the High-Performance Multistage Constant Current Charge Method for the Li-Ion Batteries. IEEE Trans. Energy Convers. 2018, 33, 1132–1140. [Google Scholar] [CrossRef]
- Ma, Y.; Duan, P.; Sun, Y.; Chen, H. Equalization of Lithium-Ion Battery Pack Based on Fuzzy Logic Control in Electric Vehicle. IEEE Trans. Ind. Electron. 2018, 65, 6762–6771. [Google Scholar] [CrossRef]
- Hasan, R.; Scott, J. Comments on ’State of Charge-Dependent Polynomial Equivalent Circuit Modeling for Electrochemical Impedance Spectroscopy of Lithium-Ion Batteries’. IEEE Trans. Power Electron. 2020, 35, 4448. [Google Scholar] [CrossRef] [Green Version]
- Lai, X.; He, L.; Wang, S.; Zhou, L.; Zhang, Y.; Sun, T.; Zheng, Y. Co-estimation of state of charge and state of power for lithium-ion batteries based on fractional variable-order model. J. Clean. Prod. 2020, 255, 10319–10329. [Google Scholar] [CrossRef]
- Lyu, C.; Lai, Q.; Ge, T.; Yu, H.; Wang, L.; Ma, N. A lead-acid battery’s remaining useful life prediction by using electrochemical model in the Particle Filtering framework. Energy 2017, 120, 975–984. [Google Scholar] [CrossRef]
- Zou, C.; Hu, X.; Dey, S.; Zhang, L.; Tang, X. Nonlinear Fractional-Order Estimator With Guaranteed Robustness and Stability for Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2018, 65, 5951–5961. [Google Scholar] [CrossRef]
- Benamar, A.; Travaillé, P.; Clairand, J.M.; Escrivá-Escrivá, G. Non-Linear Control of a DC Microgrid for Electric Vehicle Charging Stations. Int. J. Adv. Sci. Eng. Inf. Technol. 2020, 10, 593–598. [Google Scholar] [CrossRef] [Green Version]
- Boukhezzar, B.; Siguerdidjane, H. Comparison between linear and nonlinear control strategies for variable speed wind turbines. Control Eng. Pract. 2010, 18, 1357–1368. [Google Scholar] [CrossRef]
- Perez, F.; Iovine, A.; Damm, G.; Galai-Dol, L.; Ribeiro, P. Regenerative Braking Control for Trains in a DC MicroGrid Using Dynamic Feedback Linearization Techniques. IFAC-PapersOnLine 2019, 52, 401–406. [Google Scholar] [CrossRef]
- Perez, F.; Iovine, A.; Damm, G.; Galai-Dol, L.; Ribeiro, P.F. Stability Analysis of a DC MicroGrid for a Smart Railway Station Integrating Renewable Sources. IEEE Trans. Control Syst. Technol. 2020, 28, 1802–1816. [Google Scholar] [CrossRef]
- Siad, S.B.; Malkawi, A.; Damm, G.; Lopes, L.; Dol, L.G. Nonlinear control of a DC MicroGrid for the integration of distributed generation based on different time scales. Int. J. Electr. Power Energy Syst. 2019, 111, 93–100. [Google Scholar] [CrossRef] [Green Version]
- Iovine, A.; Jim, M.; Damm, G. Nonlinear Control for DC MicroGrids Enabling Efficient Renewable Power Integration and Ancillary Services for AC grids. IEEE Trans. Power Syst. 2018, 8950, 1–10. [Google Scholar] [CrossRef]
- Qnovo. Inside the battery of a Nissan Leaf. Available online: https://www.geoenergia.gob.ec/ (accessed on 11 May 2021).
- Liu, Y.; Liao, G.Y.; Lai, M.C. Development and validation of a lithium-ion polymer battery cell model for 12V SLI battery applications. In Proceedings of the ASME 2018 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Quebec City, QC, Canada, 26–29 August 2018; Volume 3, pp. 1–10. [Google Scholar] [CrossRef]
- Liu, Y.; Liao, Y.G.; Lai, M.C. Lithium-Ion Polymer Battery for 12-Voltage Applications: Experiment, Modelling, and Validation. Energies 2020, 13, 638. [Google Scholar] [CrossRef] [Green Version]
- Yao, L.W.; Aziz, J.A.; Kong, P.Y.; Idris, N.R.N. Modeling of lithium-ion battery using MATLAB/simulink. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 1729–1734. [Google Scholar]
- Liu, Y.; Liao, Y.G.; Lai, M.C. Modeling and Validation of Lithium-Ion Polymer SLI Battery (No. 2019-01-0594); SAE International: Troy, MI, USA, 2019. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Samuel, P.; Eddaaif, R.; González-Zumba, A.; Clairand, J.-M. Assessment of the Impact of Electric Vehicle Batteries in the Non-Linear Control of DC Microgrids. Appl. Sci. 2021, 11, 4415. https://doi.org/10.3390/app11104415
Samuel P, Eddaaif R, González-Zumba A, Clairand J-M. Assessment of the Impact of Electric Vehicle Batteries in the Non-Linear Control of DC Microgrids. Applied Sciences. 2021; 11(10):4415. https://doi.org/10.3390/app11104415
Chicago/Turabian StyleSamuel, Pierre, Rachid Eddaaif, Andrés González-Zumba, and Jean-Michel Clairand. 2021. "Assessment of the Impact of Electric Vehicle Batteries in the Non-Linear Control of DC Microgrids" Applied Sciences 11, no. 10: 4415. https://doi.org/10.3390/app11104415