1. Introduction
In the field of structural dynamics, tuned mass dampers (TMDs) are passive devices installed on lively structures to reduce their response level [
1,
2]. They are extensively used not only to mitigate vertical vibrations in, for example, light floors [
3] or footbridge decks [
4,
5], but also horizontal vibration of tall buildings, such as wind turbines [
6], chimneys [
7], bridge piles or skyscrappers [
4,
8]. One of the most widespread ways of modeling TMDs is as single-degree-of-freedom (SDOF) systems composed of a moving mass
, an elastic member
which attaches it to the structure and a damping element
which accounts for the energy dissipation, conferring it a natural frequency
and a damping ratio
as an isolated system [
9]. After its installation, and if the device is properly tuned, the movement of both systems is coupled so the kinetic energy flows from one device to another and, during this energy exchange, a part of it is dissipated in the damping element. For the coupling to be effective, the mass damper must be properly tuned, i.e., its natural frequency
must be close to and below one of the natural frequencies of the structure [
9,
10]. In this sense, the TMD only reduces the response of the structure in a relatively narrow frequency band in the vicinity of the affected mode. If the contribution of several modes needs to be mitigated, then several TMDs should be installed or other more sophisticated approaches (active mass dampers, etc.) should be considered. The overall effectiveness of a TMD, as well as the width of the frequency band it affects, can be controlled by means of the amount of moving mass
: the greater the moving mass, the more effective it is and the wider the affected frequency band. However, since larger moving masses usually involve higher costs, the minimum one fulfilling certain criteria is commonly installed.
As mentioned above, after the installation of a TMD, its movement is coupled to the structural response, making it difficult to estimate its properties as an isolated device (
,
,
). Even if these properties have been precisely estimated before its installation, it is not possible knowledge of them later, for several reasons. In the short term, the properties of a TMD may be affected by the installation process, which usually involves disassembling and reassembling some of its parts. In the long term, the properties may be modified due to the unavoidable wearing that affects the different elements over time. One common way to cope with these issues is to install multiple TMDs with close tuning frequencies [
11,
12]. Together, these TMDs cover a wider frequency range in comparison to a single device, so the potential structural modifications or detuning issues are mitigated to some extent. However, installing more than one TMD may not be possible in some structures (for its cost, location issues, etc.), and a well-tuned mass damper is more suitable. The most common, but indirect, strategy to evaluate the goodness of the tuning consists in estimating the properties [
13,
14] or the frequency response of the ensemble (structure with TMD) [
15]. By assessing the modal properties (natural frequency and damping ratio) or the amplitude of the frequency response of the structure in the vicinity of the mitigated mode, the tuning of the TMD can be evaluated and, if required, an iterative re-tuning process may be carried out. However, although useful, none of these procedures provide the sought TMD properties by themselves.
The authors of this work already presented a direct transmissibility-based methodology to accurately estimate both the natural frequency
and the damping ratio
of a TMD installed on a slender structure [
16], which works not only for properly tuned mass dampers, but also for any kind of SDOF system installed on a structure, not necessarily tuned to mitigate the contribution of a specific mode. The procedure consists in simultaneously measuring both the acceleration of the TMD moving mass,
, and the acceleration of the point of the structure to which it is attached,
, and estimating the frequency response function between them, called transmissibility function. Two approaches were presented: one in which the frequency response function was directly estimated between the two measured signals and another in which the frequency response function was estimated between the structure acceleration and the relative acceleration (
). By fitting the data of each frequency response function to the corresponding transmissibility analytical expression, the natural frequency
and the damping ratio
were estimated.
In this work, a novel methodology is presented to simultaneously estimate the natural frequency,
, the damping ratio,
, and the moving mass,
, of a TMD installed on a lively structure. The major difference between this and the previous work [
16] is that the presented procedure enables an estimate of the moving mass of the TMD,
, to be made, something that could not be done before due to the adopted approach being completely based on transmissibility functions. Now, a two-step methodology is presented. The first step is still based on the estimation of a transmissibility function, but the procedure is completed with a second step in which a couple of frequency response functions are calculated by applying a force on the moving mass. These functions, together with the transmissibility, lead to a curve that can be fitted to the classical frequency response function of an SDOF system, which is explicitly expressed in terms of the three parameters of the system, including its moving mass,
. As will be shown, the methodology is entirely based on simple expressions, deduced from the SDOF system theory, so it is within the grasp of every mechanical engineer. In addition, it requires a very reduced set of measurements to be performed, leading to a procedure that is very easy and fast to apply. This constitutes a major advantage with respect to others, such as the mass modification technique. In order to compare the quality of the obtained results against the required workload, that technique is also covered in this article. It is a widespread method also conceived to estimate the moving mass of an SDOF system based on the definition of the undamped natural frequency of an SDOF system.
As mentioned above, the presented methodology is aimed at estimating, in an easy and rapid way, the whole set of modal parameters (moving mass, natural frequency and damping ratio) of an installed TMD, which is helpful in a variety of scenarios. It is useful, for example, for the fine tuning of the mass damper in order to overcome modifications it may suffer while assembling or transporting it. The TMD properties can also be periodically checked to assess its long-term durability and to foresee tuning or maintenance works. Finally, although this methodology is mainly focused on installed TMDs, it could also be extended to estimating the properties of any substructure modeled as a single-degree-of-freedom system.
The paper is organized as follows: in
Section 2, a rapid overview of the theoretical background is provided to present some magnitudes and nomenclature; then,
Section 3 is devoted to presenting both the novel two-step methodology and the mass modification technique;
Section 4 shows a validation example to which the methodology is applied; finally,
Section 5 sums up the main conclusions of this work. In addition, the full dataset and code required to reproduce the results of this work are available in [
17].
2. Theoretical Background
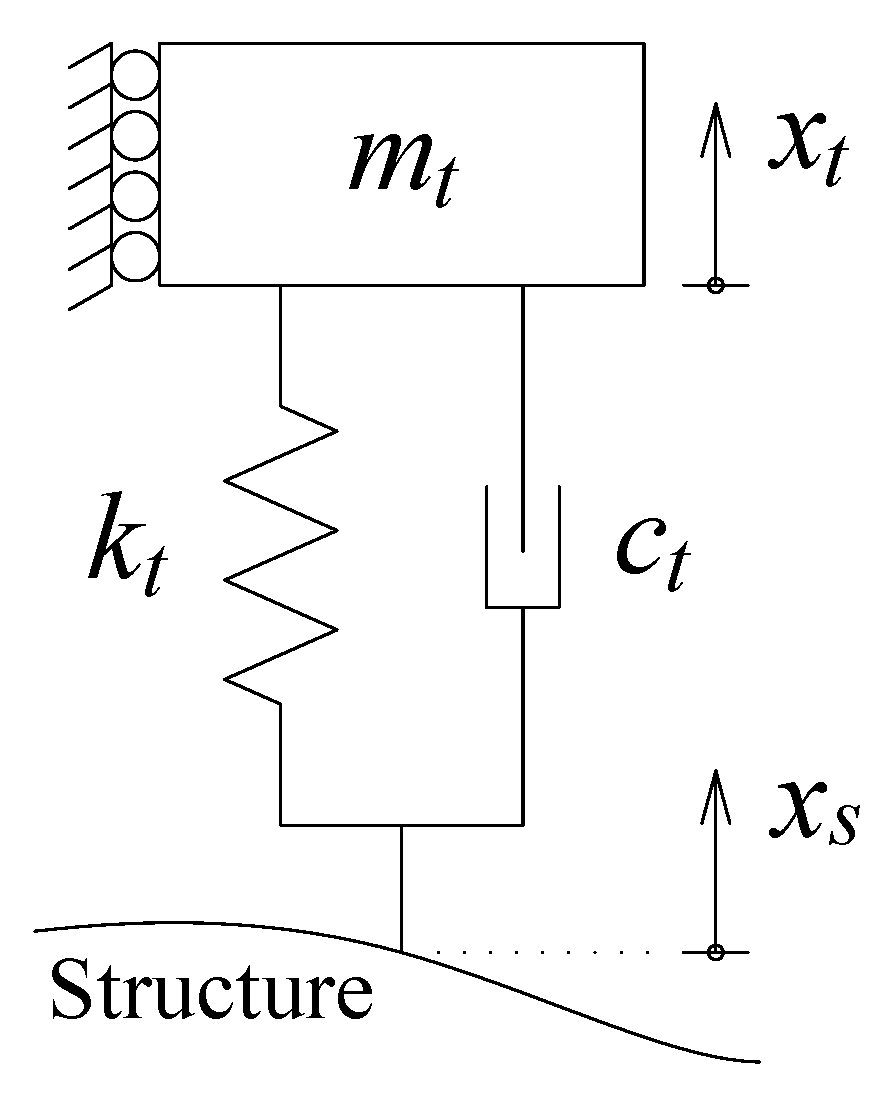
A tuned mass damper, and any other SDOF system attached to a structure, can be conceptually modeled as shown in
Figure 1. Without loss of generality, the SDOF system is oriented in the vertical direction, but it could be placed in any other direction as long as it properly couples to the response of the structure. The movement of this conceptual model, which can be subjected to an external force
and/or to a base acceleration
for being attached to a lively structure, can be described by means of the expression in Equation (
1), where
,
and
account for the physical properties of the SDOF system (moving mass, damping constant and stiffness constant, respectively). The natural frequency,
in rad/s, and the damping ratio
of the isolated SDOF system can be defined so that
and
. Also, the relative coordinate
is defined to simplify the way the base movement is accounted for. After introducing this variable change into Equation (
1), it is divided by the moving mass
and the definitions of the modal properties are introduced, leading to Equation (
2).
Equation (
2) is transformed into the Laplace domain by substituting the time variable (
t) by the complex variable (
s) and taking into account that
,
and
, where
is the Laplace transform operator and the uppercase functions represent the Laplace transform of the corresponding lowercase functions. Then, by letting
be the excitation frequency in rad/s, the complex variable
s is substituted by
(so
), to obtain Equation (
3), which is in the frequency domain. This last equation is the core of the novel methodology presented in the next section. Note that, if no force is applied (
N,
N), which is the main assumption made in [
16], then the term that explicitly contains the moving mass
in Equation (
3) disappears and the transmissibility expression in Equation (
4), one of the two expressions presented in [
16], is derived. Also note that the structural properties are not included in this formulation, so it is not necessary for them to be known for the presented methodology to be applied.
Finally, in this work, some frequency response functions are computed from experimental data. The experimental data always consist in two time series, recorded at a certain sample rate (
in samples per second, or S/s). One will act as the input,
, and the other as the output,
. Once registered, the time domain signals may be filtered to remove any undesirable frequency components or detrended to remove any linear trend. In order to estimate the frequency response function that relates the input and the output, both time domain signals are windowed to divide the whole time series into segments of a certain size (
). If required, the window function may also weight the segments to avoid frequency leakage problems. Each segment is processed separately by computing the cross power spectral density defined in Equation (
5) for two signals
and
, where
stands for the expected value operator and the star (*) accounts for the complex conjugate operand. In addition, the auto power spectral densities,
and
, can be computed through the same expression by substituting
in the first case and
in the second. More details about this can be found in [
18].
The cross and auto power spectral densities associated to every pair of processed segments can be averaged, so a final cross power spectral density,
, and a couple of auto power spectral densities,
and
, are obtained. To calculate the frequency response function, one of the estimators shown in Equation (
6) can be used, where
. The main difference between the estimators
and
is the assumption of where the noise is mostly concentrated: in the input time series or the output time series. As can be seen, the estimator
is the geometric mean of
and
. More details about each approach can be found in [
19,
20]. In this work, the
estimator is used, unless otherwise stated, and, as can be seen in the provided code [
17], the function
tfestimate of MATLAB is used to perform all the aforementioned estimations.
4. Validation Example
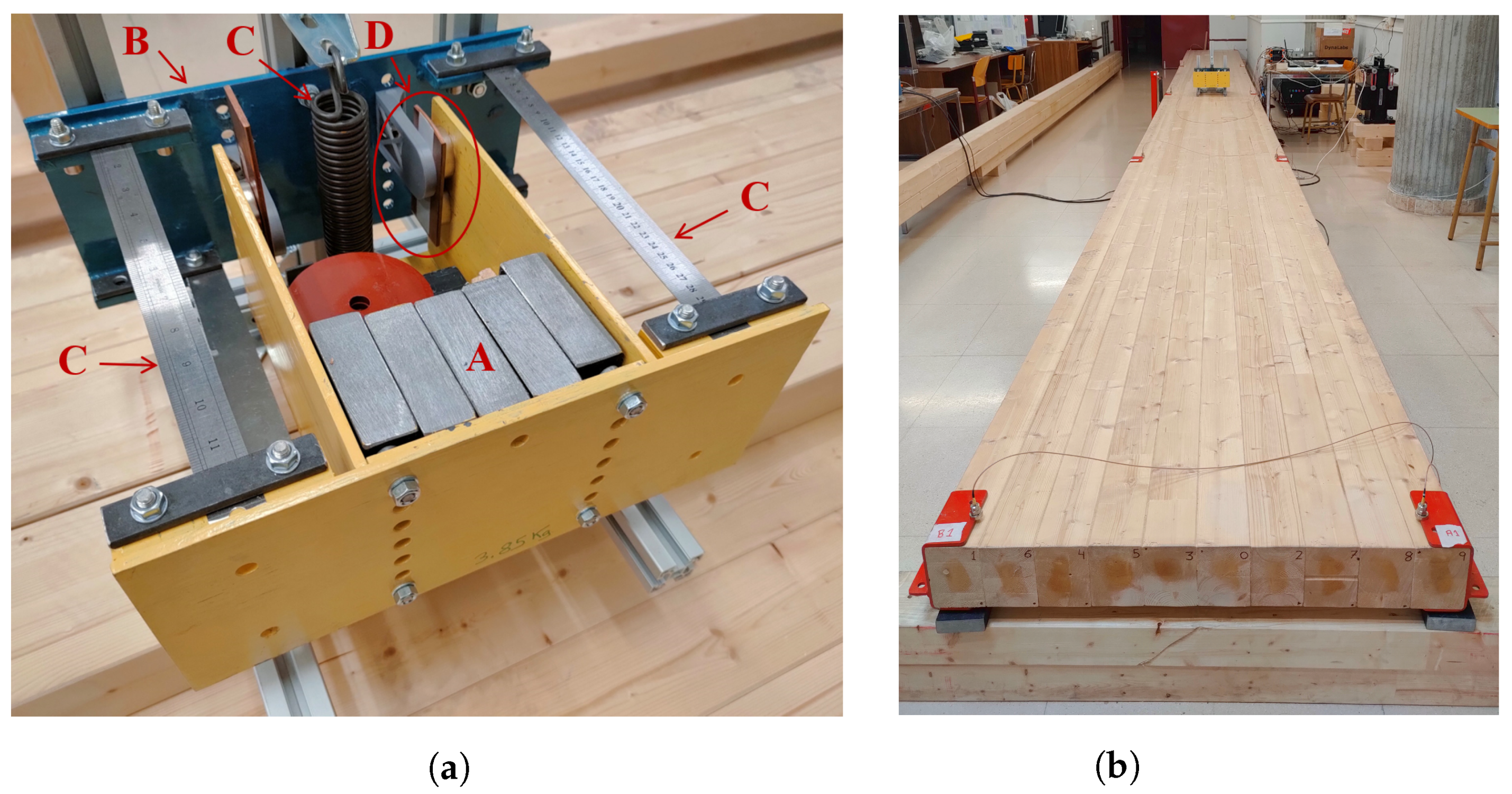
To validate the proposed methodology, the SDOF system shown in
Figure 2a is placed on the lively structure shown in
Figure 2b. The SDOF system represents a TMD, but it is not perfectly tuned because it is not required for the purposes of this work. It is composed of a moving mass (letter A in
Figure 2a), which is attached to its frame (B) via four slender plates and a spring (C), conferring the ensemble a certain amount of stiffness. The damper (D) consists of a couple of permanent neodymium magnets, which are rigidly joined to the frame, placed very close to a copper plate, which is rigidly attached to the moving mass. As explained in [
21,
22], the movement of the copper plate inside the permanent magnetic field develops the so-called Eddy currents, creating an effect similar to an ideal viscous damper, since the overall reaction force can be assumed to be proportional to the relative velocity of both elements within a certain range of relative velocities. By means of a precise weighting scale, the total mass of the moving elements can be estimated. To do so, apart from the moving mass itself (A), half of the mass of the elastic members (C) and the mass of the magnets (D) are also included, leading to 32.52 kg. Note that this value may not be fully representative of the effective moving mass due to the dynamic coupling effects that arise when the SDOF system is installed on the structure.
The ensemble is simply placed on the structure and the frame is designed so it can be assumed to be rigid enough. The lively structure on which the SDOF system is installed is a timber plate with a main span of 13.5 m, a width of 1 m and a height of 0.14 m. It is made of laminated wood, Glulam 24 h. It is simply supported at both ends and, to alleviate the deflection due to its own weight, the middle section is supported by two elastic members made of three springs each. The first mode of this plate is at 2.33 Hz, with a modal damping ratio of 0.27% and a mode shape similar to the first bending mode shape of a simple-supported beam. The generalized mass of that mode at the center section (the place on which the SDOF system will be installed) is 433 kg. Note that the data given in this paragraph is intended to fully present the structure on which the TMD is placed; however, as mentioned above, it is not required for the presented methodology to be applied.
The example is divided into three parts. First of all, the dynamic properties of the SDOF system are identified by performing a regular experimental modal analysis in the reference scenario with it placed on a rigid floor. Then, the SDOF system is installed on the middle section of the timber plate and, by means of the mass modification technique (
Section 3.1), a first estimation of its properties is carried out. Finally, the procedure presented in
Section 3.2 is applied to obtain a second estimation of the same properties. Note that all recorded data, as well as the MATLAB code that processes it, is available at a Mendeley Data repository [
17]. As mentioned before, the built-in function
tfestimate is used to perform the estimation of the experimental frequency response functions by using the estimators
and
(see Equation (
6)), which are then used to calculate the
estimator and perform further computations. This function handles the windowing and averaging processes typical of this sort of time-to-frequency-domain transforms. On the other hand, the different curve fittings are carried out by means of the function
fmincon, a built-in optimization function. A function error, which calculates the squared error between the experimental FRFs and the synthesized ones for a certain set of properties. The optimization function, then, finds the set of properties that minimizes that error.
4.1. Isolated System
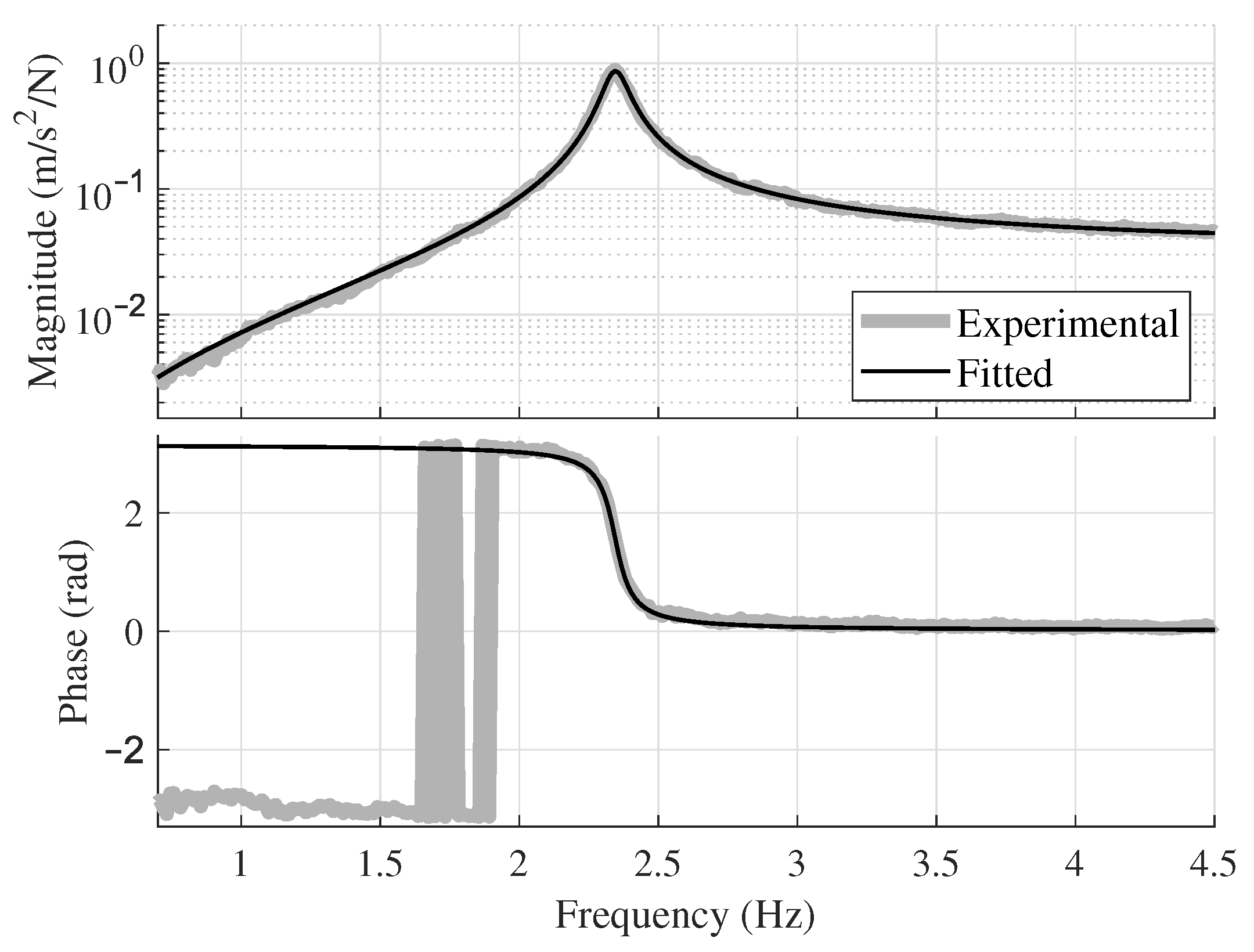
To obtain a precise estimation of the SDOF system properties, it is first placed on a rigid floor (isolated from the structure) and, by means of an impact hammer, a force is applied to the moving mass. Both the input force and the acceleration response of the moving mass are synchronously recorded at a sample rate of 400 S/s. A total of five impacts are recorded and processed by means of the
tfestimate function of MATLAB to estimate the frequency response function (
estimator). A rectangular window (i.e., with a constant weighting function equalling 1) with a length of
points, or 81.92 s, is used to divide the time series data into segments, so each resulting segment encompasses one single impact. The estimated accelerance (frequency response function between an input force and an acceleration response), which is computed between 0.7 and 4.5 Hz with a frequency resolution of 0.01 Hz, is shown in
Figure 3 (gray line). The vertical lines between 1.5 and 2 Hz correspond to very small variations around
rad which arise due to estimation errors and noise. Since the phase plot shows data in the range
rad, phase values over
rad or under
rad are shifted by
to enter the plotting range, leading to vertical lines joining them. To estimate the SDOF system properties, the obtained complex series of data in the frequency domain is fitted to the accelerance SDOF expression shown in Equation (
10), which is obtained by deriving the receptance function
in the frequency domain twice, equivalent to multiplying it by
[
20].
Figure 3 also shows the fitted frequency response function (black line) and the corresponding estimated properties are summarized in the first row of
Table 1, associated to the case “Rigid floor”, which is assumed to be the reference scenario in terms of error estimation. Note that the fitted line near
rad (under 2 Hz) is actually close to the experimental data at
rad due to the
phase shift mentioned above.
4.2. Mass Modification Technique
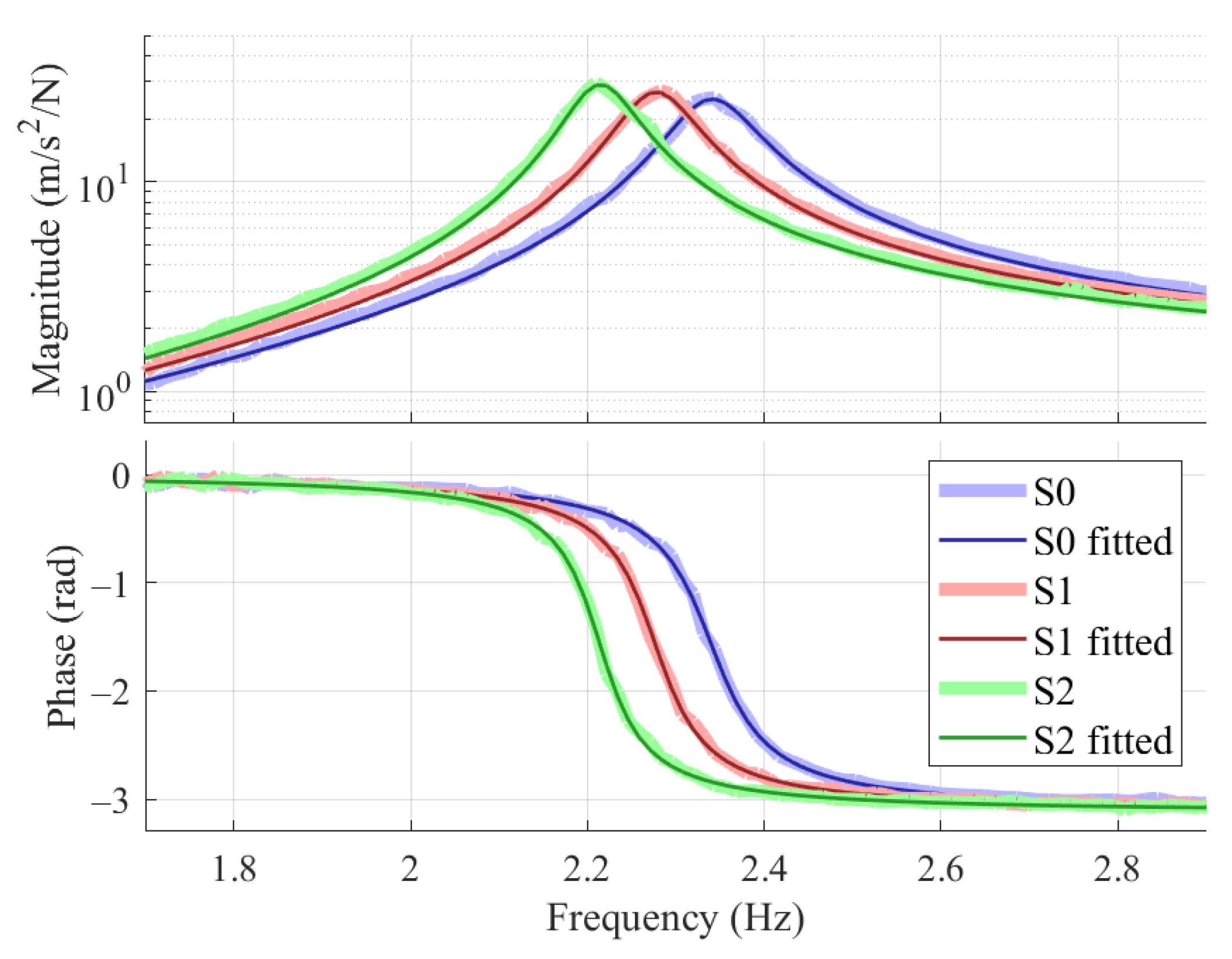
The device is then placed on the structure. The mass modification technique is applied by considering three different scenarios: the original scenario in which the moving mass equals
and no extra mass is added (
kg), named scenario S0; a situation in which a mass of
kg is added to it, (scenario S1); and a scenario in which a total mass of
kg (2 × 2.02 kg) is added, (scenario S2). The added mass represents 6.55% of the original moving mass in the first scenario and 13.10% in the second one. In each case, the structure is excited by walking on it (thus, not applying any direct force on the moving mass of the SDOF system, as explained in
Section 3.2) and the acceleration of the moving mass (
) is synchronously recorded, together with the acceleration of the point of the structure on which the SDOF system is located (
). The relative acceleration,
is then calculated. The transmissibility function between
(input) and
is estimated via the
estimator in a similar way to that explained in
Section 4.1. This time, however, the time series data are segmented by means of the Hanning window of
points, instead of the rectangular one, as it is a long continuous recording. An overlapping of
points (50%) between two consecutive segments is used to overcome some problems that may arise due to the low weighting values at both window ends. The time series recording lasts around 425 s (170,000 points at 400 S/s), so a total of 9 averages can be computed by means of the
tfestimate function. The resulting transmissibility functions in the three scenarios are shown in
Figure 4 (thick lines).
The three transmissibility functions, one per scenario, are fitted to their corresponding expression (Equation (
4)). The fitted curves are also shown in
Figure 4 (thin lines). The set of identified natural frequencies and damping ratios are shown in
Table 2 together with the mass added in each scenario (
, where
i stands for the number of the scenario: 0, 1 or 2) and an estimation of the moving mass by applying Equation (
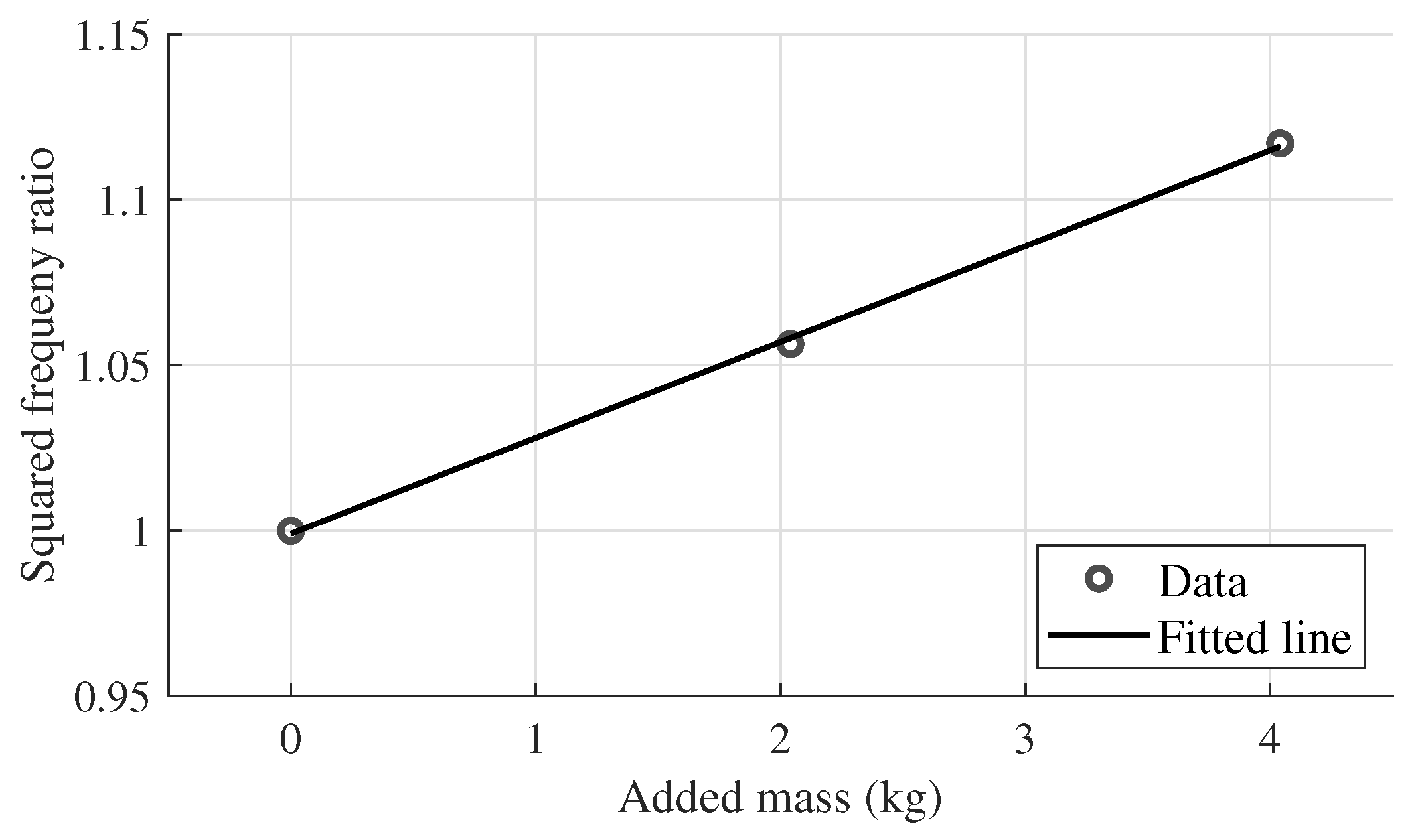
7) (the scenario S0 is taken as the reference for both estimations). As explained
Section 3.1, the points
, which are equal to
, plotted against the mass increment
, should draw a straight line. This plot is shown in
Figure 5. As can be seen, the three points draw an almost perfectly straight line, with a slope of 0.0290 kg
−1, leading to an original moving mass of
kg, and an independent term above 0.999, as expected. This moving mass value, together with the natural frequency and damping ratio of the scenario S0 (with no added mass), is included in
Table 1 (row “Mass modification”) for comparison purposes and the relative errors (where
stands for the mass value error,
for the natural frequency error and
for the damping ratio error) are estimated with respect to the reference case (“Rigid floor”).
4.3. Novel Procedure
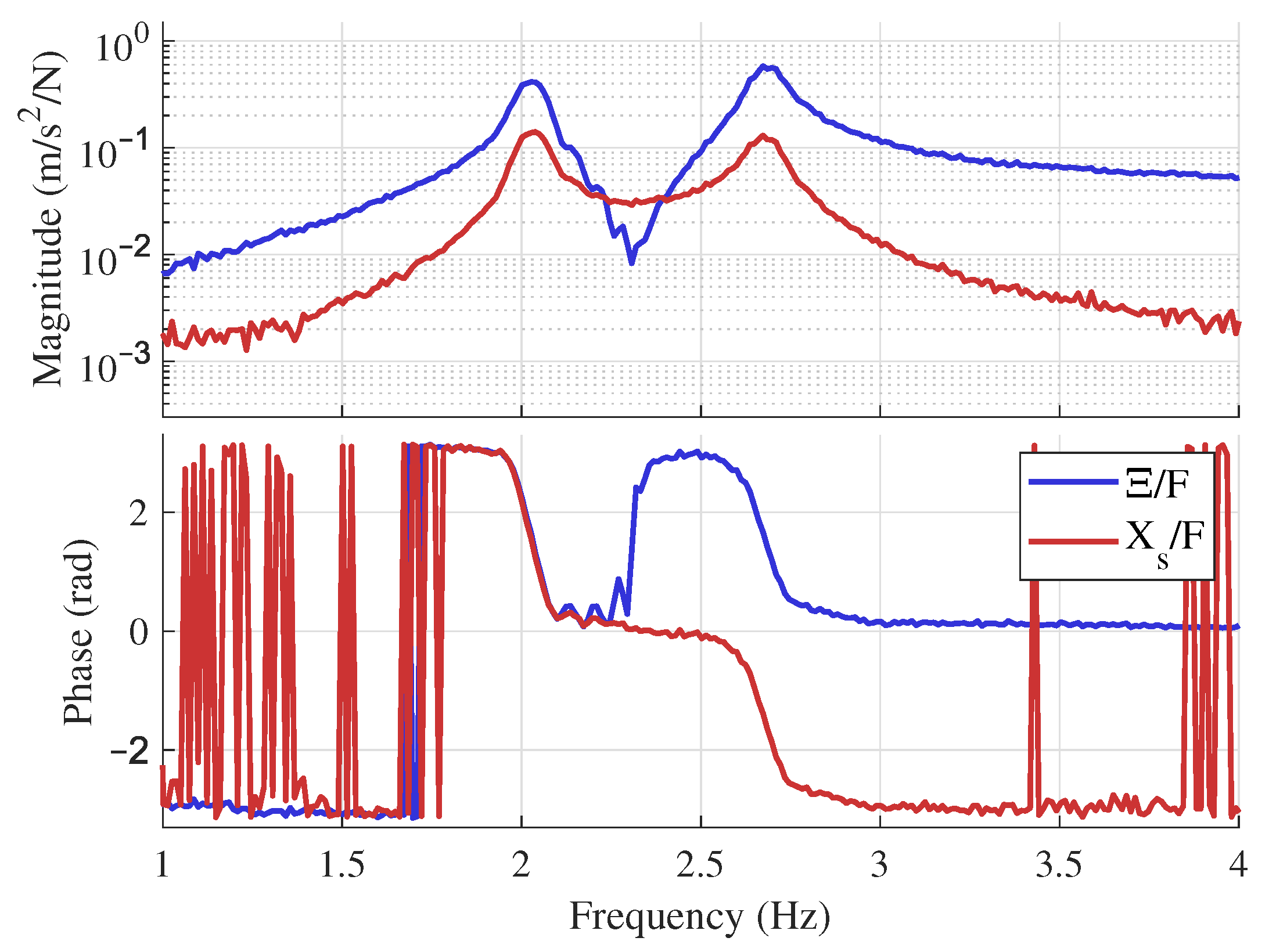
Finally, with the SDOF system installed on the lively structure, a force is applied on its moving mass, so the FRFs required to compute the left hand side of Equation (
9) can be estimated. Similarly to
Section 4.1, an impact hammer is used to apply the force, so the amount of moving mass is not modified during the test. The applied force is synchronously measured at 400 S/s, together with both acceleration responses (moving mass,
, and structure,
), from which the relative acceleration
can be computed. The time signals are divided into segments encompassing one impact each by means of a rectangular window of length 32,768 points. The resulting averaged accelerances are shown in
Figure 6, where phase shifts of
are also present due to noise and estimation errors.
By using these two accelerances and the transmissibility function computed in
Section 4.2 as scenario S0, the left hand side of Equation (
9) can be calculated. Note that all the FRFs in Equation (
9) are defined as receptances, but they can be transformed into accelerances by multiplying them by
(second derivative in the frequency domain). As a result, the expression in the right hand side becomes the SDOF accelerance,
, shown in Equation (
10).
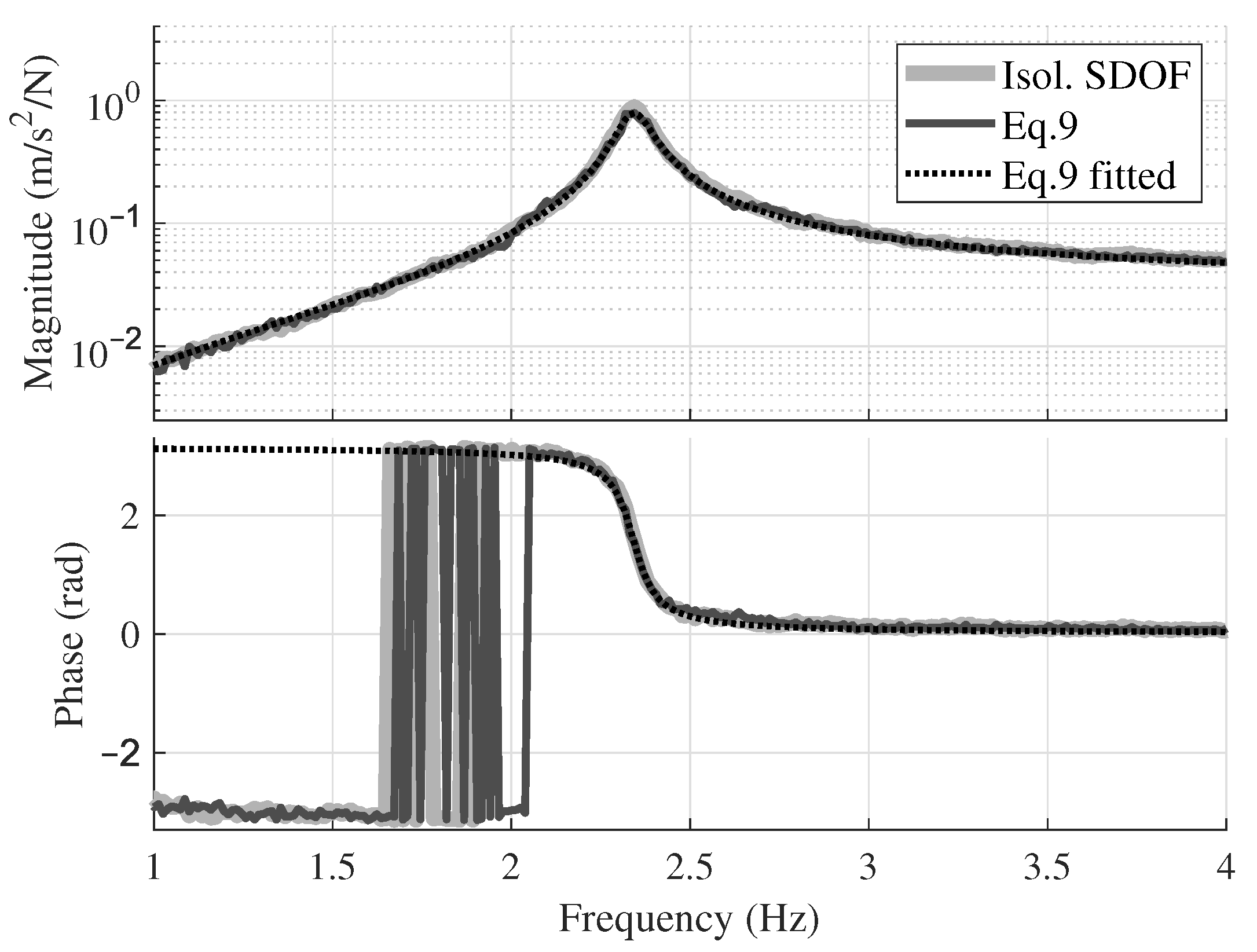
Figure 7 shows the obtained curve associated to the left hand side of Equation (
9), together with the accelerance estimated in
Section 4.1, by isolating the SDOF system from the structure. As can be seen, there exists a high correspondence between both curves, so the left hand side of Equation (
9) effectively accounts for the SDOF FRF, as expected. The dotted line in
Figure 7 shows the fitting performed to the calculated curve and the resulting properties are summarized in the last row of
Table 1 together with the relative error. As can be seen, a high correspondence exists between the three methods, although the novel methodology leads to a better estimate of the moving mass value in comparison with both versions of the mass modification technique.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}