Semi-Active Magnetic Levitation System for Education





Abstract
:1. Introduction
- The construction of a low-cost MagLev device for education.
- A semi-active PID-like controller for the MagLev, which is an unstable system. The controller uses only the object’s position for feedback (no other information is available to the controller).
2. Material and Methods
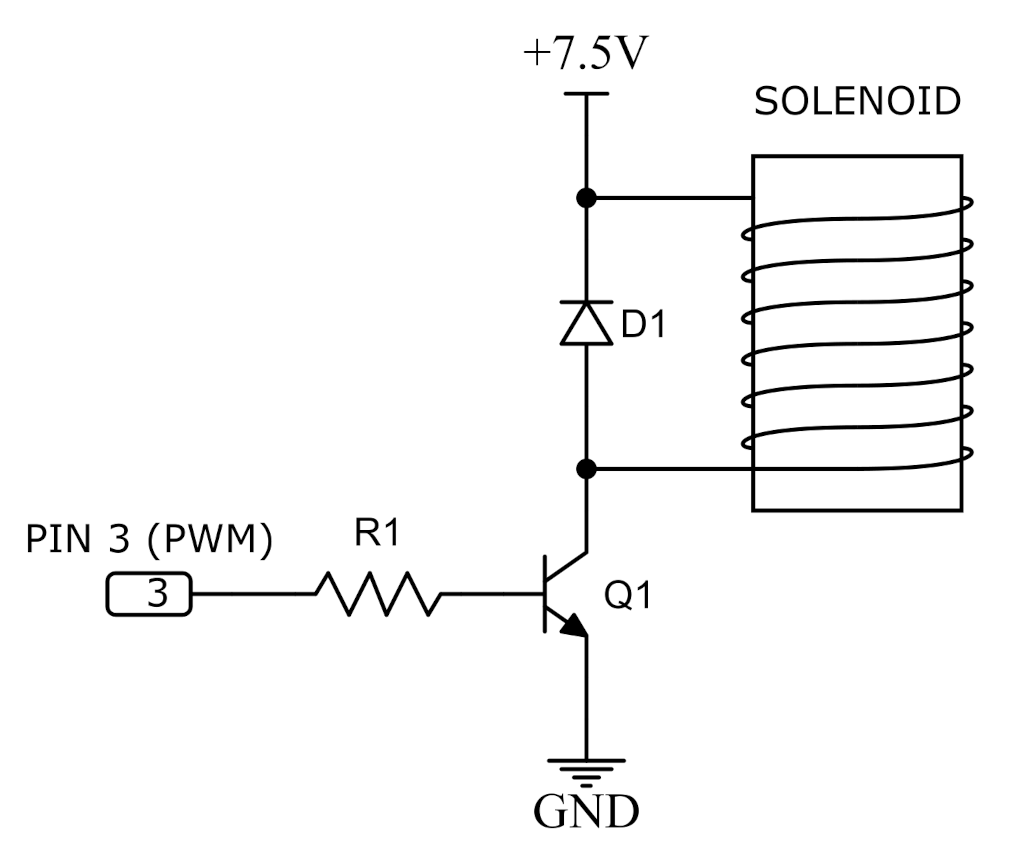
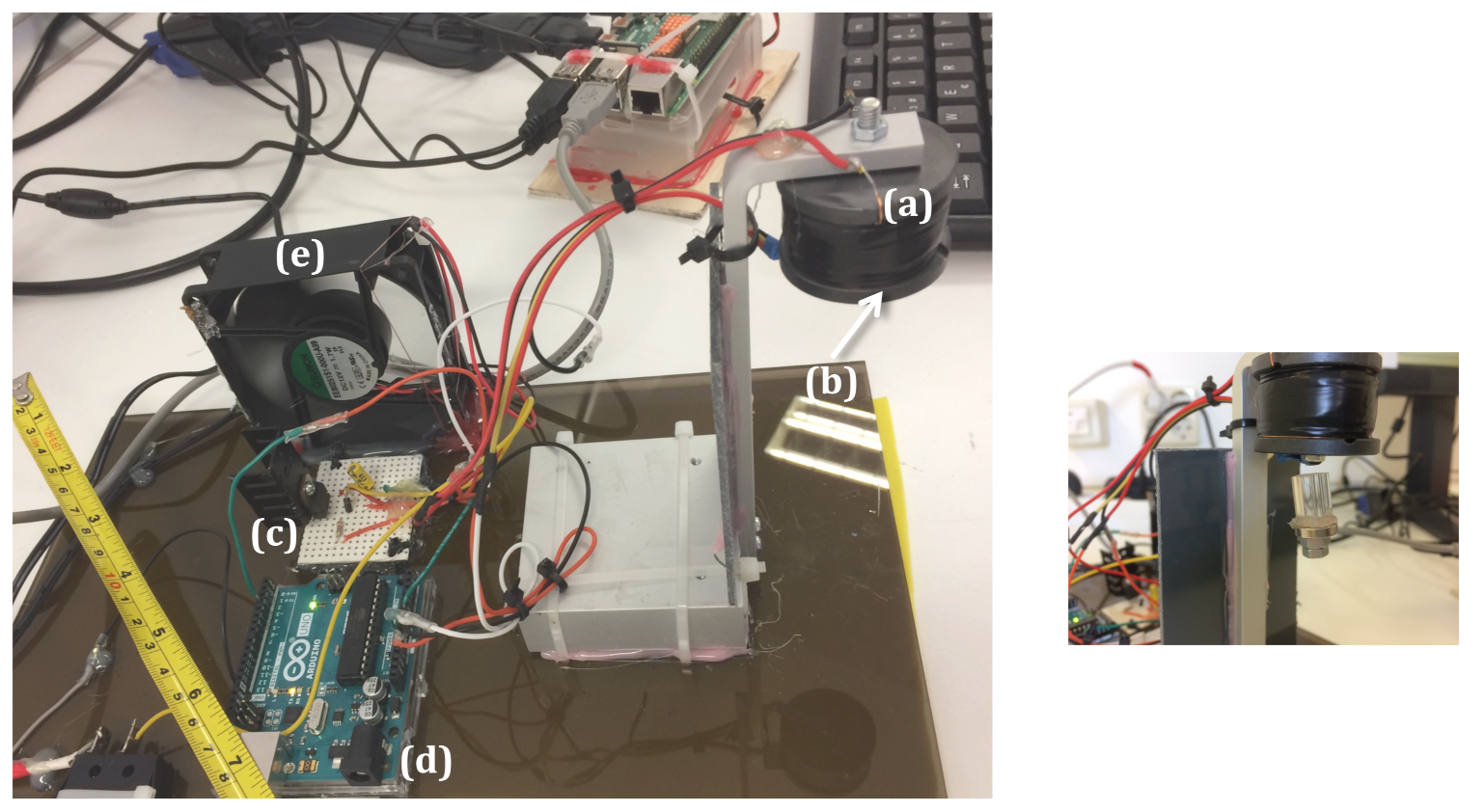
2.1. Actuator
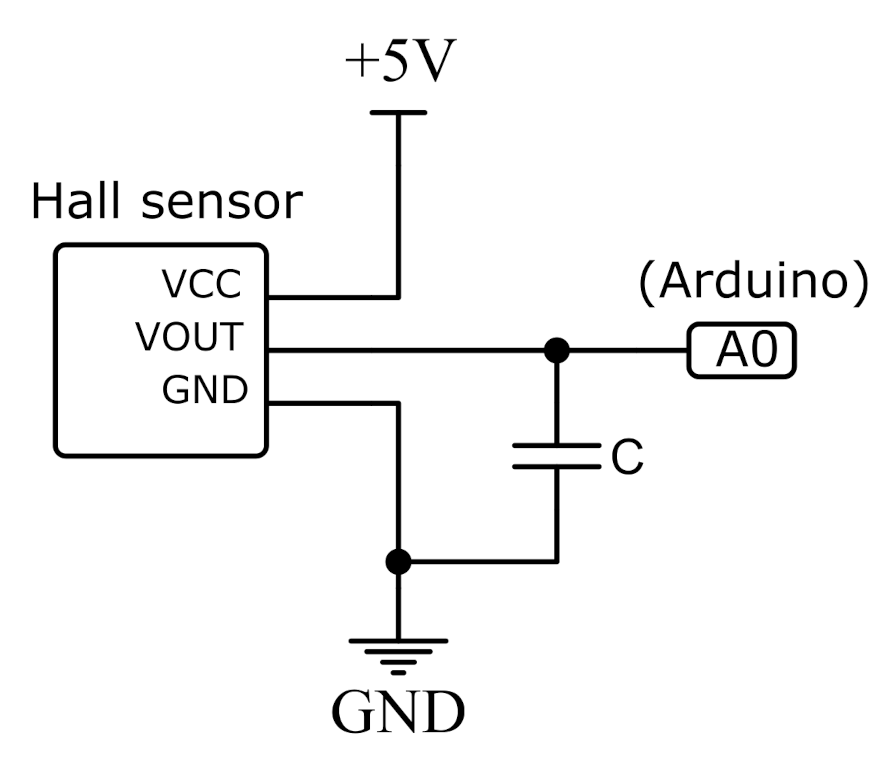
2.2. Sensor
2.3. Microcontroller
2.4. Implementation Cost
2.5. Control Algorithm
2.6. Limitations
- Arduino Uno microcontroller. Despite being a low-cost solution, the Arduino Uno limits the speed of numerical evaluations. In addition, it works only with positive voltage (i.e., ). To handle this situation, we develop a semi-active control law to compensate the gravitational force, as described in the following.
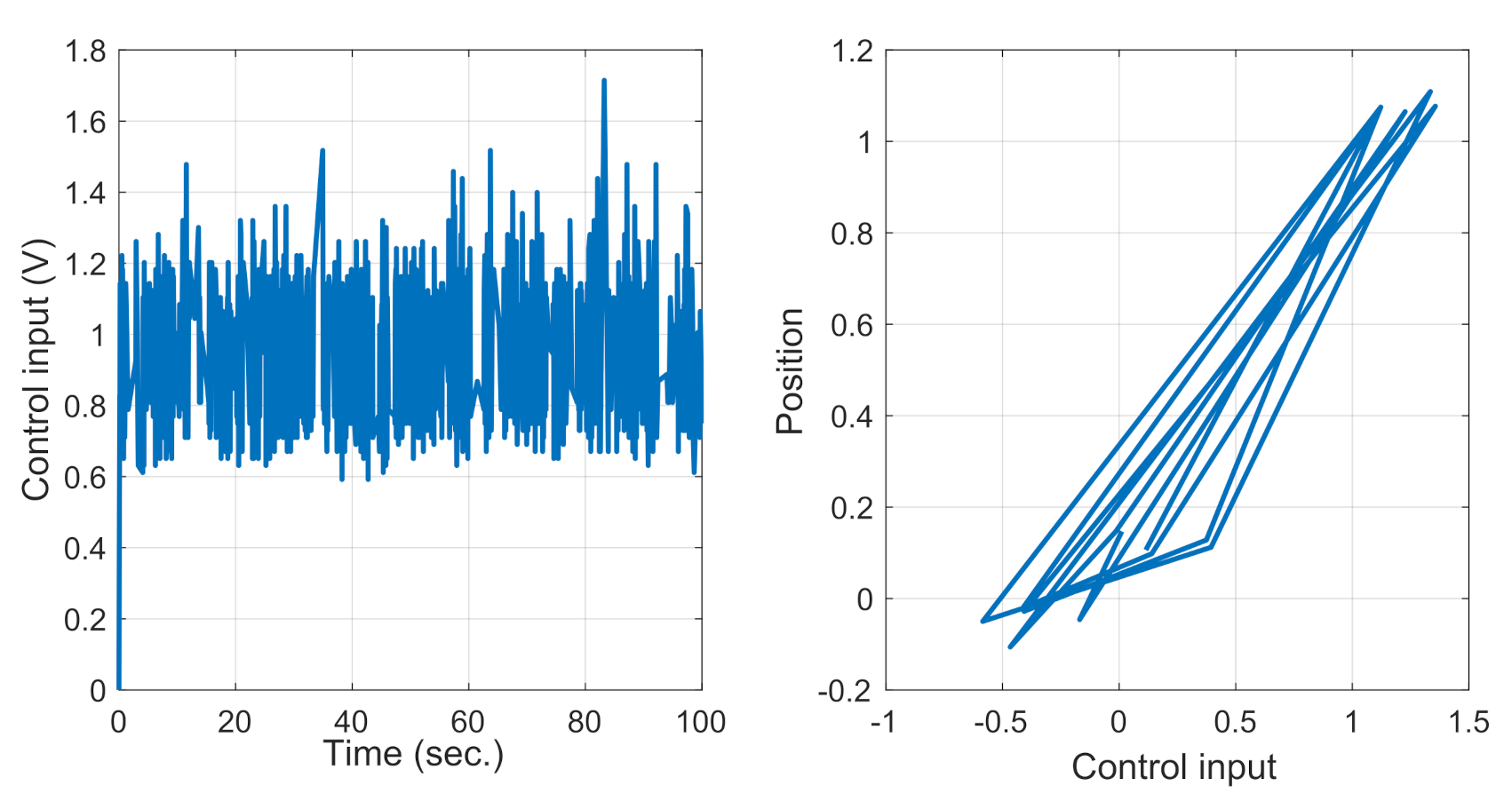
- The electromagnet can produce hysteresis, a phenomenon documented in the literature [34] (Ch. 1.6). Moreover, the Hall-effect sensor may become inaccurate due to the corresponding hysteresis [36]. In this case, the sensor measures an unreal distance d, depending on whether the object moves in the sensor’s direction or not—Figure 6 illustrates this phenomenon through experimental data. Additionally, the Hall-effect sensor is sensitive to the magnetic field generated by nearby electrical wires.
- The anti-windup PID controller (6) is model free, so it was tuned empirically for the best results possible, minimizing the position error. In addition, the semi-active approach implies a difficulty in obtaining a ‘clean’ levitation, as shown in the experiment; see https://youtu.be/giaySAGlwAY (access on 7 May 2021).
- The PWM signal driving the electromagnet creates a certain level of noise in the circuit, leading to instability. The capacitor attached to the output of the Hall-effect sensor diminishes the amplitude of that noise.
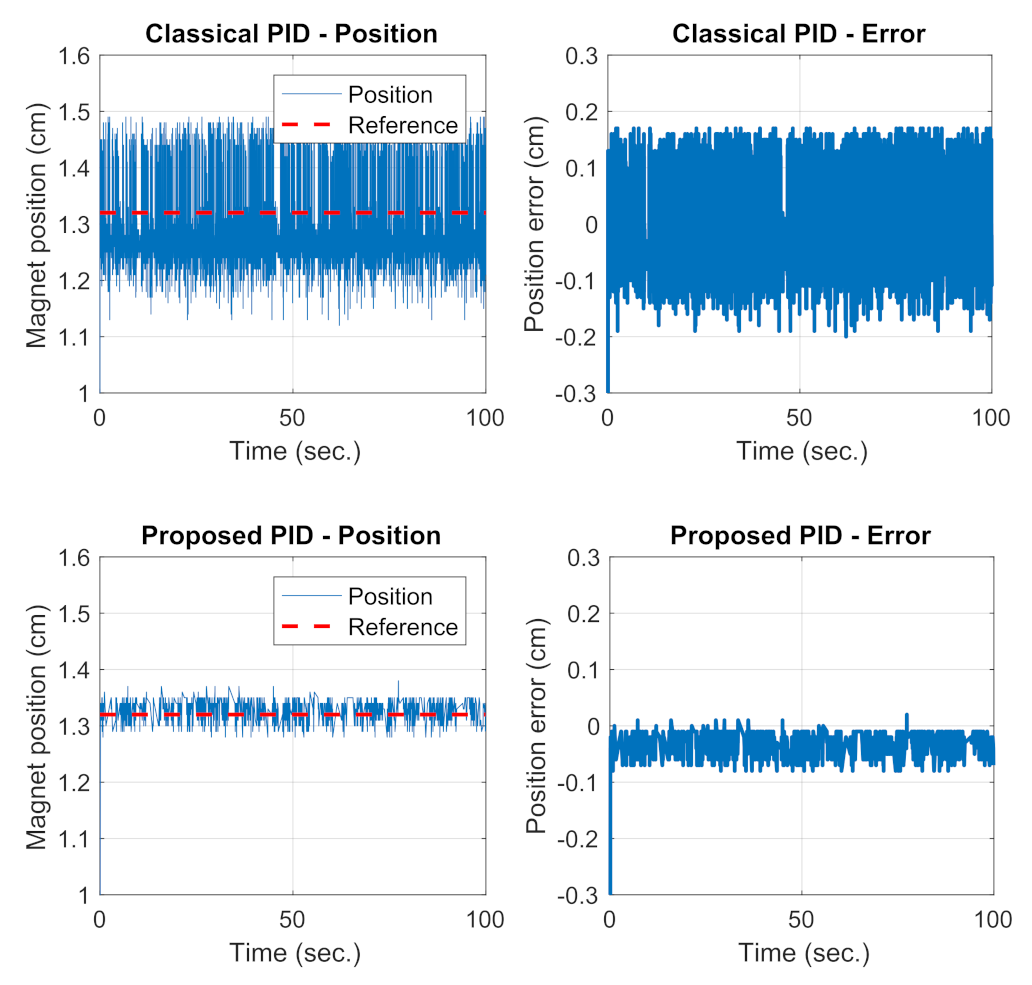
3. Results and Discussion
Discussion
4. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADC | Analog-to-digital converter; |
| GND | voltage reference ground; |
| MagLev | magnetic levitation; |
| MC | microcontroller; |
| PID | proportional integral derivative controller; |
| PWM | pulse width modulation. |
Appendix A. MagLev Mathematical Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| k | Kg m/sA |
| R | |
| L | 15 mH |
| m | Kg |
| g | m/s |
| cm |
Appendix B. Arduino Uno Code
References
- Ding, J.; Yang, X.; Long, Z. Structure and control design of levitation electromagnet for electromagnetic suspension medium-speed maglev train. J. Vib. Control 2019, 25, 1179–1193. [Google Scholar] [CrossRef]
- Jeong, J.; Ha, C.; Lim, J.; Choi, J. Analysis and Control of the Electromagnetic Coupling Effect of the Levitation and Guidance Systems for a Semi-High-Speed MAGLEV Using a Magnetic Equivalent Circuit. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Duan, J.; Xiao, S.; Zhang, K.; Rotaru, M.; Sykulski, J.K. Analysis and Optimization of Asymmetrical Double-Sided Electrodynamic Suspension Devices. IEEE Trans. Magn. 2019, 55, 1–5. [Google Scholar] [CrossRef]
- Chen, A.; Zhang, M.; Zhu, Y.; Huai, Z.; Yang, K.; Hu, C. A Whole Space Harmonic Force Model for the Disk Electrodynamic Suspension Device Utilizing Magnetic Vector Potential. IEEE Trans. Magn. 2017, 53, 1–10. [Google Scholar] [CrossRef]
- Fonseca, C.A.; Santos, I.; Weber, H.I. An experimental and theoretical approach of a pinned and a conventional ball bearing for active magnetic bearings. Mech. Syst. Signal Process. 2020, 138, 106541. [Google Scholar] [CrossRef]
- Sheh Zad, H.; Khan, T.I.; Lazoglu, I. Design and Adaptive Sliding-Mode Control of Hybrid Magnetic Bearings. IEEE Trans. Ind. Electron. 2018, 65, 2537–2547. [Google Scholar] [CrossRef]
- Zhang, W.; Zhu, H. Radial magnetic bearings: An overview. Results Phys. 2017, 7, 3756–3766. [Google Scholar] [CrossRef]
- Filatov, A.V.; Maslen, E.H. Passive magnetic bearing for flywheel energy storage systems. IEEE Trans. Magn. 2001, 37, 3913–3924. [Google Scholar] [CrossRef]
- Li, X.; Anvari, B.; Palazzolo, A.; Wang, Z.; Toliyat, H. A Utility-Scale Flywheel Energy Storage System with a Shaftless, Hubless, High-Strength Steel Rotor. IEEE Trans. Ind. Electron. 2018, 65, 6667–6675. [Google Scholar] [CrossRef]
- Yaghoubi, H. The most important maglev applications. J. Eng. 2013, 2013, 537986. [Google Scholar] [CrossRef] [Green Version]
- Mughees, A.; Mohsin, S.A. Design and Control of Magnetic Levitation System by Optimizing Fractional Order PID Controller Using Ant Colony Optimization Algorithm. IEEE Access 2020, 8, 116704–116723. [Google Scholar] [CrossRef]
- Qin, Y.; Peng, H.; Ruan, W.; Wu, J.; Gao, J. A modeling and control approach to magnetic levitation system based on state-dependent ARX model. J. Process Control 2014, 24, 93–112. [Google Scholar] [CrossRef]
- Yang, W.; Meng, F.; Sun, M.; Liu, K. Passivity-Based Control Design for Magnetic Levitation System. Appl. Sci. 2020, 10, 2392. [Google Scholar] [CrossRef] [Green Version]
- Molina, L.M.C.; Galluzzi, R.; Bonfitto, A.; Tonoli, A.; Amati, N. Magnetic Levitation Control Based on Flux Density and Current Measurement. Appl. Sci. 2018, 8, 2545. [Google Scholar] [CrossRef] [Green Version]
- Kishore, S.; Laxmi, V. Modeling, analysis and experimental evaluation of boundary threshold limits for Maglev system. Int. J. Dyn. Control 2020, 8, 707–716. [Google Scholar] [CrossRef]
- Yaseen, M.H.; Abd, H.J. Modeling and control for a magnetic levitation system based on SIMLAB platform in real time. Results Phys. 2018, 8, 153–159. [Google Scholar] [CrossRef]
- Sathiyavathi, S. Design of sliding mode controller for magnetic levitation system. Comput. Electr. Eng. 2019, 78, 184–203. [Google Scholar] [CrossRef]
- Roy, P.; Roy, B.K. Sliding Mode Control Versus Fractional-Order Sliding Mode Control: Applied to a Magnetic Levitation System. J. Control Autom. Electr. Syst. 2020, 31, 597–606. [Google Scholar] [CrossRef]
- Morales, R.; Sira-Ramírez, H. Trajectory tracking for the magnetic ball levitation system via exact feedforward linearisation and GPI control. Int. J. Control 2010, 83, 1155–1166. [Google Scholar] [CrossRef]
- Wong, T.H. Design of a Magnetic Levitation Control System—An Undergraduate Project. IEEE Trans. Educ. 1986, E-29, 196–200. [Google Scholar] [CrossRef]
- Lundberg, K.H.; Lilienkamp, K.A.; Marsden, G. Low-cost magnetic levitation project kits. IEEE Control Syst. Mag. 2004, 24, 65–69. [Google Scholar]
- Lilienkamp, K.A. Low-cost magnetic levitation project kits for teaching feedback system design. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; Volume 2, pp. 1308–1313. [Google Scholar] [CrossRef]
- Takács, G.; Mihalík, J.; Mikuláš, E.; Gulan, M. MagnetoShield: Prototype of a Low-Cost Magnetic Levitation Device for Control Education. In Proceedings of the IEEE Global Engineering Education Conference (EDUCON), Porto, Portugal, 27–30 April 2020; pp. 1516–1525. [Google Scholar] [CrossRef]
- Zhang, Z.; Gao, T.; Qin, Y.; Yang, J.; Zhou, F. Numerical Study for Zero-Power Maglev System Inspired by Undergraduate Project Kits. IEEE Access 2020, 8, 90316–90323. [Google Scholar] [CrossRef]
- Artigas, J.I.; Barragán, L.A.; Llorente, S.; Marco, A.; Lucía, O. Low-cost magnetic levitation system for electronics learning. In Proceedings of the 2010 4th IEEE International Conference on E-Learning in Industrial Electronics, Glendale, AZ, USA, 7–10 November 2010; pp. 55–60. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, L.; Yu, L. Adaptive Terminal Sliding Mode Control for Magnetic Levitation Systems With Enhanced Disturbance Compensation. IEEE Trans. Ind. Electron. 2021, 68, 756–766. [Google Scholar] [CrossRef]
- Zubia, J.; Casado, L.; Aldabaldetreku, G.; Montero, A.; Zubia, E.; Durana, G. Design and Development of a Low-Cost Optical Current Sensor. Sensors 2013, 13, 13584–13595. [Google Scholar] [CrossRef] [PubMed]
- Galadima, A.A. Arduino as a learning tool. In Proceedings of the 2014 11th International Conference on Electronics, Computer and Computation (ICECCO), Abuja, Nigeria, 29 September–1 October 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Johnston, S.J.; Cox, S.J. The Raspberry Pi: A Technology Disrupter, and the Enabler of Dreams. Electronics 2017, 6, 51. [Google Scholar] [CrossRef] [Green Version]
- Kumar, V.; Jerome, J. LQR based optimal tuning of PID controller for trajectory tracking of Magnetic Levitation System. Procedia Eng. 2013, 64, 254–264. [Google Scholar] [CrossRef] [Green Version]
- Gutiérrez-Frías, O.; Lozada-Castillo, N.; Aguirre-Anaya, J.A.; Flores-Hernández, D.A. Nested Saturation Function Control of a Magnetic Levitation System. Complexity 2020, 2020, 3545374. [Google Scholar] [CrossRef]
- Aguilar-Figueroa, B.A.; Argüelles-Lucho, P.; Woo-García, R.M.; Hernández-Pérez, M.A.; López-Huerta, F. Electromagnetic Levitation System Based on a PID Controller. In Proceedings of the 2020 IEEE International Conference on Engineering Veracruz (ICEV), Boca del Rio, Mexico, 26–29 October 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Bohn, C.; Atherton, D.P. An analysis package comparing PID anti-windup strategies. IEEE Control Syst. Mag. 1995, 15, 34–40. [Google Scholar]
- Chikazumi, S. Physics of Ferromagnetism, 2nd ed.; International Series of Monographs on Physics; Oxford University Press: Oxford, UK, 2010; Volume 94. [Google Scholar]
- Rossing, T.D. The Science of Sound, 2nd ed.; Addison-Wesley: Boston, MA, USA, 1990; Chapter 11. [Google Scholar]
- Gryś, S.; Najgebauer, M. An attempt of accuracy assesment of the hysteresis loop and power loss in magnetic materials during control measurements. Measurement 2021, 174, 108962. [Google Scholar] [CrossRef]
- Pujol-Vazquez, G.; Vargas, A.N.; Mobayen, S.; Acho, L. Data, Source Code, and Documents for the MagLev. zenodo. 10 April 2021. Available online: https://zenodo.org/record/4678928#.YL8mXRYRVEY (accessed on 7 May 2021).
- Meystre, P.; Sargent, M. Classical Electromagnetic Fields; Elements of Quantum Optics, Springer: Berlin, Germany, 1999. [Google Scholar] [CrossRef]
- Astrom, K.J.; Hägglund, T. PID Controllers: Theory, Design, and Tuning; Research ISA: Triangle Park, NC, USA, 1995; Chapter 4.7. [Google Scholar]






| Element | Specification | Price |
|---|---|---|
| Arduino Uno | ||
| Hall sensor | A1321 | |
| Object | Neodymium disc | |
| Capacitator | F | |
| Resistor | ||
| Diode | 1N5817 | |
| Transistor | NTD4858N | |
| Solenoid | 15 mH–2.4 | |
| Total |
| (Error) | Value |
|---|---|
| Classical PID | |
| Control in (6) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pujol-Vázquez, G.; Vargas, A.N.; Mobayen, S.; Acho, L. Semi-Active Magnetic Levitation System for Education. Appl. Sci. 2021, 11, 5330. https://doi.org/10.3390/app11125330
Pujol-Vázquez G, Vargas AN, Mobayen S, Acho L. Semi-Active Magnetic Levitation System for Education. Applied Sciences. 2021; 11(12):5330. https://doi.org/10.3390/app11125330
Chicago/Turabian StylePujol-Vázquez, Gisela, Alessandro N. Vargas, Saleh Mobayen, and Leonardo Acho. 2021. "Semi-Active Magnetic Levitation System for Education" Applied Sciences 11, no. 12: 5330. https://doi.org/10.3390/app11125330
APA StylePujol-Vázquez, G., Vargas, A. N., Mobayen, S., & Acho, L. (2021). Semi-Active Magnetic Levitation System for Education. Applied Sciences, 11(12), 5330. https://doi.org/10.3390/app11125330