1. Introduction
Low-frequency sound absorption within a limited space is always a challenge in noise control engineering. Traditional passive acoustic structures usually have the disadvantage of being large in size, but active noise control technology also has drawbacks, such as instability and high cost. In recent years, the semi-active structure of a shunted loudspeaker (SL) for sound absorption has attracted much attention. For an SL with a negative impedance converter (NIC), the circuit parameters, such as resistance, capacitance and inductance, are transformed due to the negative impedance converter. This can effectively adjust the acoustic impedance of the coupled system to match that of the air in a wide frequency range [
1]. Initially, Forward [
2] proposed a preliminary experiment on the feasibility of using shunted damping in optical systems. Lissek et al. [
3,
4,
5,
6] introduced shunt circuits to loudspeakers and used the SL to control the acoustic impedance of walls for indoor sound absorption. Good sound absorption for low frequencies can be achieved in a relatively narrow frequency band. In their later research, analogous analysis, experimental optimization of the SL and active control theory were also carried out. Due to the low-frequency sound absorption properties of the SL, many structures relevant to the SL that have better sound absorption performance have been reported [
7,
8,
9,
10].
Some references can be found for the optimal design of an SL. Lissek et al. [
5] established a low-order polynomial function and the effect of four parameters on sound absorption was investigated by using the response surface method (RSM). These four parameters were the moving mass of the loudspeaker, the enclosure volume, the filling density of mineral fiber within the enclosure and the electrical load value to which the loudspeaker was connected. Rivet et al. [
11] introduced the SL for interior damping optimization and they determined the interior eigenfrequency by using a finite element model established in COMSOL Multiphysics. They also calculated the optimal location and orientation of the loudspeaker by establishing the linear equations of the system. Liu et al. [
12] applied the SL to the pipe by means of a polar configuration of the system’s characteristic equations. The optimal resistance, inductance and location of the SL were derived. This method effectively improved the insertion loss of the pipe. Zhang et al. [
13] analyzed the effect of the circuit resistance, inductance and capacitance (RLC) on the acoustic impedance and absorption coefficient of the SL in detail. They provided an experimental procedure for achieving effective broadband sound absorption from the low to the middle frequency range. An array of 64 SLs was experimentally investigated by Qiu et al. [
14], and the optimal array alignment spacing, to control 100 Hz and 200 Hz tone noise, was also discussed.
The loudspeaker in a reported SL is oriented for sound generation. This means that this type of loudspeaker would not be suitable for optimal sound absorption due to its large force factor and moving mass. Designing a loudspeaker from the perspective of sound absorption has not been reported in the literature. To achieve this task, the loudspeaker and shunt circuit parameters must be taken into account. Since the SL is a coupled field consisting of electrical, mechanical and acoustic components, the system contains a large number of parameters and potential interactions among these parameters. The problem of multi-parameter optimization is rather complex.
The fully exhaustive backtracking algorithm (EBA) is a programming method frequently used in programming design. EBA is often applied to solve the problems that cannot be solved by conventional mathematical methods [
15]. The fully exhaustive algorithm allows multivariate functions, with potential interactions, to be solved numerically according to a combined enumeration [
16]. After the multi-dimensional database is created by the fully exhaustive method, the backtracking algorithm is then used to search for the target value by using loop traversal according to the optimal conditions [
17]. Genetic algorithms (GA) and simulated annealing algorithms (SAA) are stochastic optimization algorithms that are based on probabilistic convergence [
18]. In the optimization process of multi-peaked objective functions, GA and SAA may converge to a local optimal solution prematurely, and there is no effective quantitative analysis method for the convergence and reliability of the solution [
19,
20]. The global search feature of the EBA can effectively avoid these disadvantages. Although the EBA has the advantage of a simple computational process, it usually has the disadvantage of requiring a large amount of computing resources. In SL optimization problems, the amount of computation required is very limited; therefore, the EBA is well suited for SL multi-parameter optimization.
In this paper, six main parameters of the SL, namely moving mass , system stiffness , force factor , total resistance , total inductance and capacitance , are considered in an optimization algorithm. In the following section, the principle of the SL is introduced briefly; then, an optimized sound absorption algorithm based on a six-dimensional EBA is described, and the simulation and analysis of the loudspeaker parameters suitable for sound absorption are demonstrated. For a given loudspeaker from the market, the experimental method to determine the key parameters of the loudspeaker by an impedance tube is provided, and, finally, the optimization results of the four parameters are verified by an experiment.
2. Theoretical Model of an SL
The layout of a typical SL is shown in
Figure 1 and the technical date of the loudspeaker used in the experiment are listed in
Table 1. The SL with an NIC is assembled at the end of the impedance tube, and the effective absorption can be achieved after reasonable adjustment of the electrical parameters. From an energy perspective, it can be understood that the sound energy is dissipated in the form of mechanical and electrical energy, reducing the reflected sound energy and achieving the purpose of sound absorption.
When the SL is in an open-circuit state, it can be considered a single-degree-of-freedom, second-order system, which consists of stiffness, mass and damping [
21]. The mechanical impedance under the case of an air cavity of depth
can be expressed as:
where
is the angular frequency,
is the speed of sound in air,
are the moving mass, suspension diaphragm stiffness and damping of the moving-coil loudspeaker, respectively.
is the acoustic impedance of air, and A is the cross-section area of the impedance tube.
is the wavenumber and
is the cavity depth, where a more specific impedance expression can be obtained after making a second-order approximation to
[
22]:
From Equation (2), it can be seen in the acoustic model of the SL with an air cavity that the total stiffness is the sum of the suspension diaphragm stiffness and the air spring of the air cavity, where the second item dominates. For example, a cylindrical cavity with a depth of 10 cm and radius of 5 cm can produce a stiffness of 11 KN/m, while a four-inch loudspeaker’s diaphragm stiffness is generally 1 KN/m. The total vibrating mass is the sum of the mechanical vibrating mass and one-third of the cavity air mass; the latter is usually negligible.
An NIC can generate the equivalent value of a negative electrical parameter between the in-phase input and ground [
23]. It can flexibly adjust the impedance caused by a larger resistance and inductance of the loudspeaker itself, enabling impedance of the SL to match with air over a wider frequency band. When connecting the SL with an NIC, the impedance of the circuit is:
The following is a derivation of the electrical force and impedance analogy. When the sound waves are transmitted to the loudspeaker’s diaphragm, it will produce a vibration with speed of
. The loudspeaker’s coil will cut the magnetic field of the permanent magnet, producing an induced electrical potential
. As the induced current is
, the electromagnetic force applied to the coil is
. The equivalent mechanical impedance induced by the circuit can be obtained by
. Here, the total impedance of the SL can be expressed as:
The normal incident absorption coefficient of the SL is:
Equation (5) shows that the sound absorption of the SL depends on the acoustic impedance of the system. The impedance matching condition should be satisfied when the sound is completely absorbed:
where
,
and
. The connection of the shunt circuit introduces new mechanical resistance and reactance. These parameters are mostly constant for the actual device, but the total impedance of the system changes with frequency. It is impractical to achieve an exact theoretical match, so a comprehensive optimization of sound absorption, based on experimental and theoretical calculation, is needed.
4. Experiment of Optimal Sound Absorption for a Four-Parameter SL
Since there were no loudspeakers available that were specifically suitable for optimal sound absorption, a commercial loudspeaker was used for the experimental verification. Thus, only four parameters of the SL, namely
, needed to be optimized. The experimental setup is shown in
Figure 4 and a photograph of the setup is shown in
Figure 5. The inside diameter of the impedance tube (SW422 (BSWA, Beijing, China)) was 100mm, and the noise signal generated by the computer was amplified by a power amplifier (PA50 (BSWA, Beijing, China)). When the loudspeaker is excited to emit a sound source, the end of the impedance tube uses a dual microphone (BSW416 (BSWA, Beijing, China)) to pick up the sound signal. The four-channel digital collector (MC3242 (BSWA, Beijing, China)) samples the signal and sends it to the computer for data processing. The loudspeaker (M4N (HiVi, Zhuhai, China)) was fixed at the end of the pipe by an air cavity equipped with a piston.
For the accurate establishment of an SL absorption model, the exact mechanical and electrical parameters of the loudspeaker need to be known. Generally, the factory-calibrated parameters of the loudspeaker are accurate, but the actual parameters will change after it is assembled due to the coupling influence in the impedance. After assembly, the damping of the loudspeaker is nonlinear and difficult to predict accurately [
22]. This will lead to a mismatch between the results of the theoretical predictions and the actual experiments, so, in our experiment, the actual damping was used in the calculation. The following describes how to experimentally determine the values of
.
4.1. The Experiment of Parameter Determination
4.1.1. Determination of Mechanical Parameters
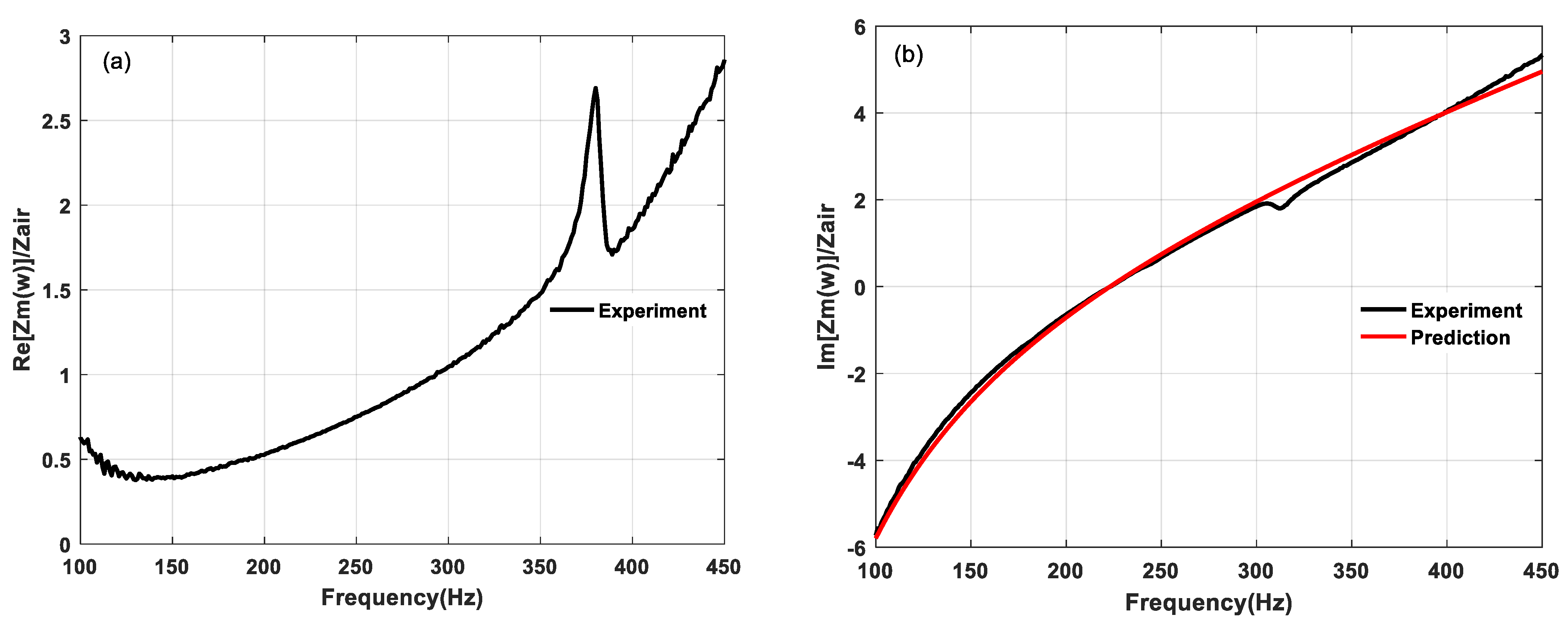
The loudspeaker was assembled at the end of the standing wave tube, in accordance with the open-circuit state. The cylinder piston was placed on the leftmost side. The resistance and reactance diagram is shown in
Figure 6a,b. The theoretical equation of acoustic impedance is:
As shown in
Figure 6a, the actual resistance of the system was not a constant value, but a nonlinear function that is dependent on the frequency. There was a damping peak at 380 Hz, which was caused by the resonance of the mechanical system. According to Equation (10a), the reactance of the system was only related to the moving mass and stiffness. Therefore, the equivalent moving mass and stiffness can be calculated by fitting the measured acoustic reactance using the least squares method. The equivalent moving mass of the loudspeaker in this experiment was 7.5
and the system stiffness was 14,724
; therefore, the three mechanical parameters of the loudspeaker could be accurately determined.
4.1.2. Determination of Electrical Parameters
The coil resistance
can be measured directly using a Digital Multi-Meter. In contrast, the coil inductance
has a frequency-dependent nonlinearity, so its value as determined by multi-meter measurement would be inaccurate.
can be fitted under short-circuit states, and when the
are introduced, the system acoustic impedance can be expressed as:
First, according to the frequency at the resonance peak and the absorption coefficient, the
and the coil
can be counted out at the resonance frequency
, as shown in Equations (12) and (13).
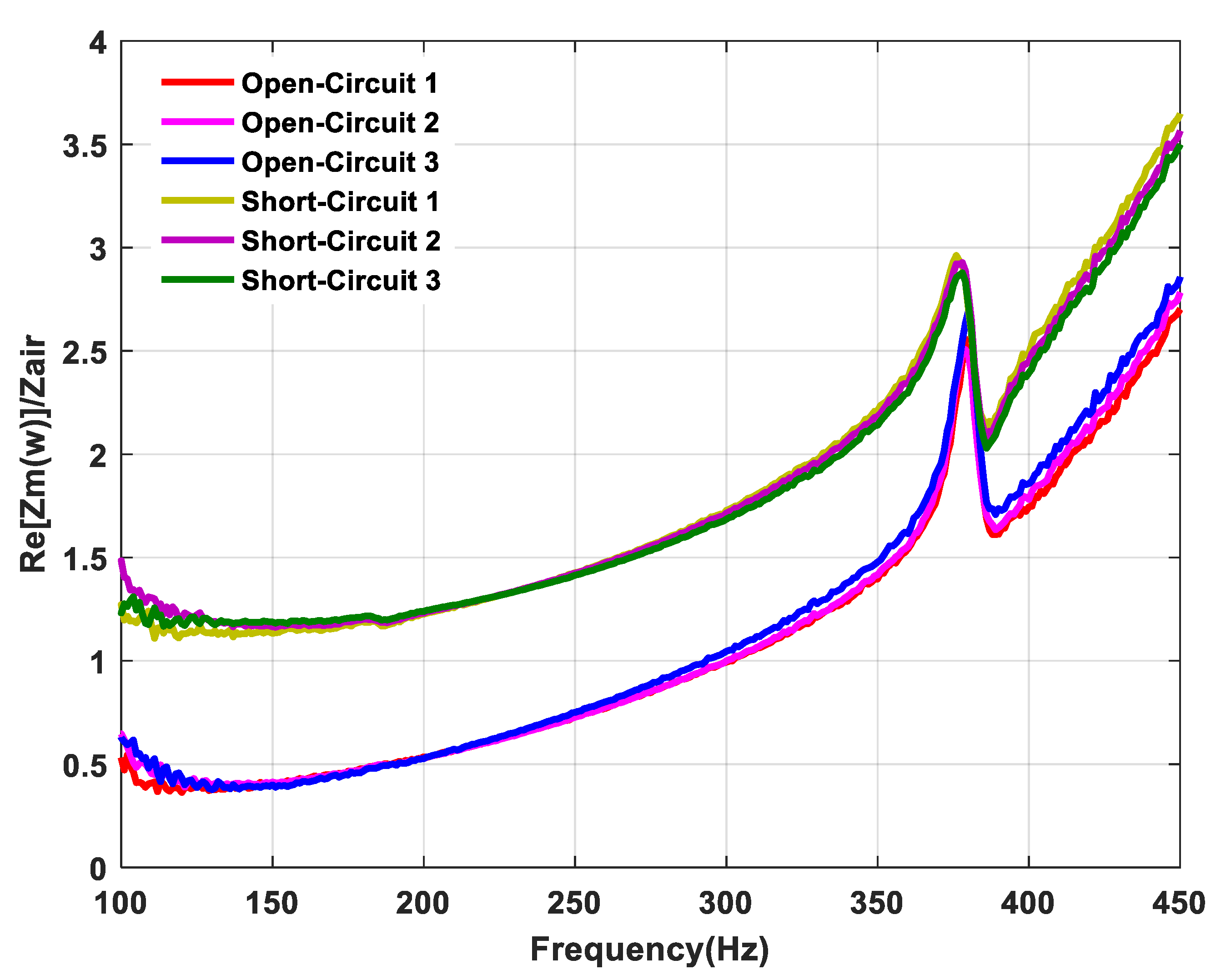
The resistance measured from the three sets of experiments for the short circuit and the open circuit are shown in
Figure 7. According to Equations (10b) and (11), the resistance difference between the short circuit and the open circuit is expressed as
. For a small signal input,
can be regarded as a constant value. By using least squares method at each frequency, the theoretical value of
can be calculated. The calculated
was 4
, and
was 0.68
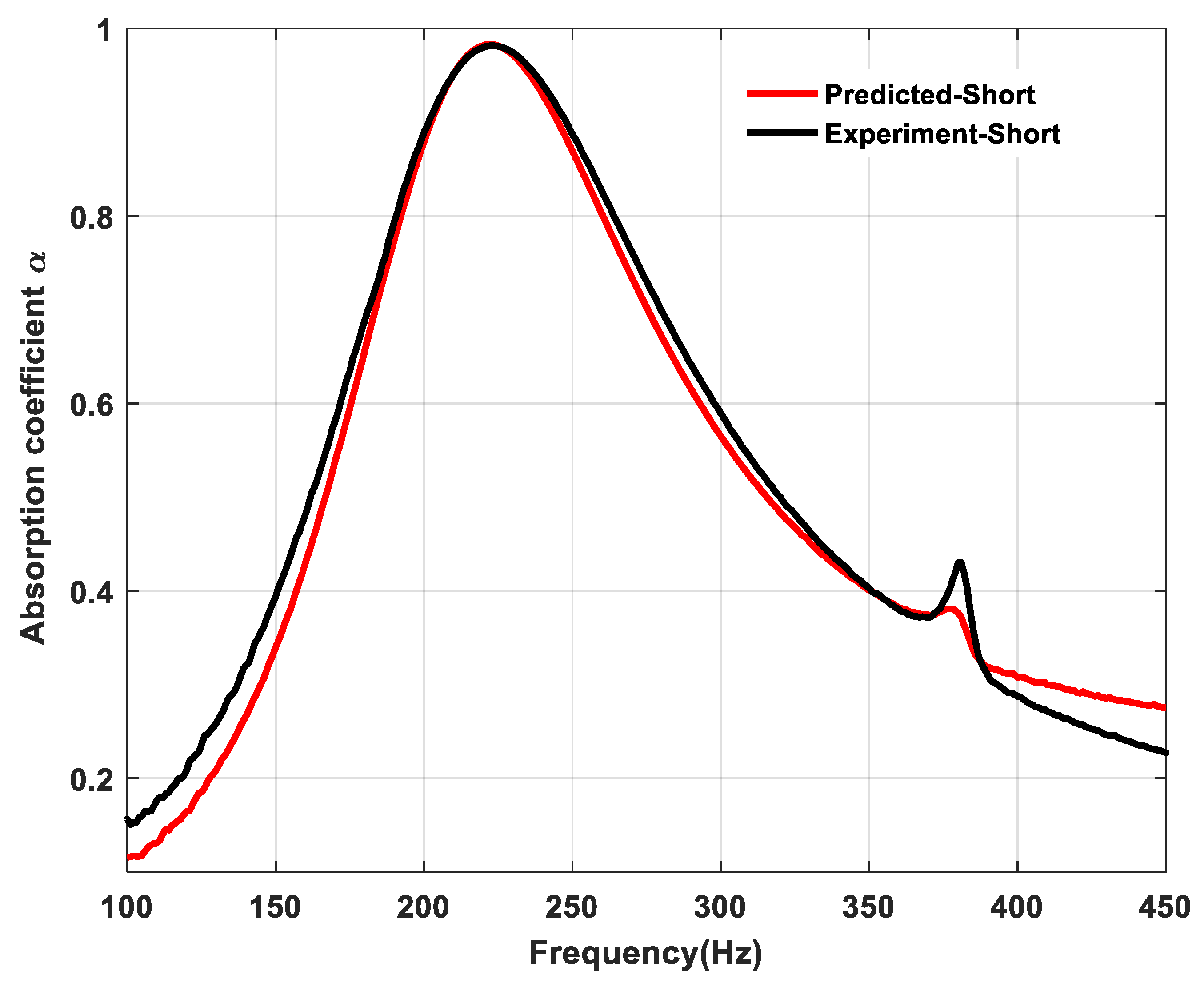
The actual parameters of the loudspeaker were all obtained. In
Figure 8, the theoretical calculation results and the actual sound absorption results are shown to match better in the short-circuit state, which verifies the parameters obtained.
4.2. Experimental Results
The resistance obtained from the experiments in the open-circuit state was sampled and used in the optimization program as the actual damping.
and
obtained in the previous section were taken as fixed parameters. The optimization procedure thus becomes EBA about
. The upper bound settings, step size settings and optimal parameters are shown in
Table 4.
The experimental balance resistance
is 1
, and the selected operational amplifier is
with a ±15
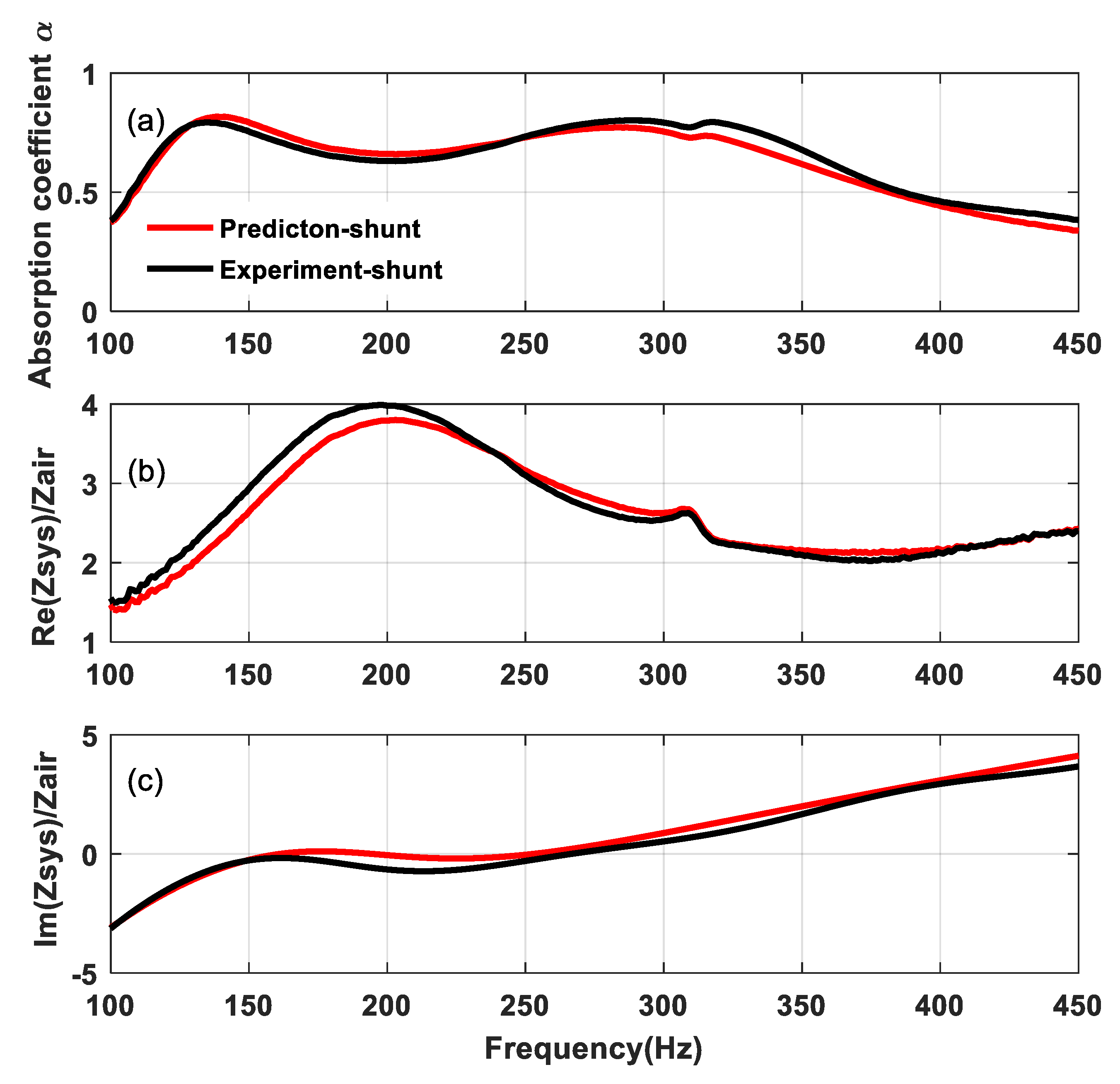
power supply. The experimental and theoretical predictions were in good agreement in the overall frequency band. As shown in
Figure 9a, in the target frequency band, the average absorption coefficient was 0.65, and the overall absorption coefficient was improved compared with the short-circuit condition. However, due to the larger
and
of the loudspeaker, the SL was less adjustable. Compared with the open-circuit case in
Figure 6b, the total reactance of the SL shown in
Figure 9c was significantly lower over a wide frequency band, especially in the 150–300 Hz band, where it trended toward zero, which allowed the reactance to better meet the matching conditions. As shown in
Figure 9b, the resistance below 450 Hz was much larger than the air acoustic resistance, so the SL over-damping limited further improvement of the sound absorption level.
4.3. Discussion
The experimental results of the four–parameter optimization showed that loudspeakers on the market have large values of moving mass and force factor, which limit the sound absorption performance improvement of the SL. The EBA optimization simulation indicated that a loudspeaker suitable for sound absorption should be characterized by small moving mass and force parameters. This would facilitate the miniaturization and design of a lightweight SL, as well as allowing for innovation in the loudspeaker structure. As shown in Equations (6) and (7), the introduction of the shunt circuit inevitably increases the acoustic resistance, while reducing the system acoustic reactance. Since excessive damping is a disadvantage for sound absorption, designing a loudspeaker with small amounts of linear damping should be the focus of future research. In addition, designing a large-area SL for diffuse field sound absorption would also be worth studying.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}