
Dynamic Stability of Orthotropic Viscoelastic Rectangular Plate of an Arbitrarily Varying Thickness

 , ,
, ,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
- -
- Development of a mathematical model of the dynamic behavior of plates of variable thickness;
- -
- Development of a method for numerical solutions of nondecaying systems of nonlinear integrodifferential equations with weakly singular kernels of an orthotropic viscoelastic plate of variable thickness under the influence of external periodic loads;
- -
- Clarification of the orthotropic viscoelastic plate’s dynamic stability with varied mechanical and geometric parameters of the plate.
2. Methods
2.1. Analytical and Numerical Method
- 1.
- All edges are simply supported:at : ; ; at : ; .
- 2.
- All edges are clamped:at : ; ; at : ; .
- 3.
- Two opposite edges are simply supported, the other two edges are clamped:at : ; ; at : ; .
2.2. Computational Methods
- (i)
- The mechanical parameters of the viscoelastic isotropic are the same in all directions. Therefore, the viscoelastic properties of the plate material are described with one core with three rheological parameters.
- (ii)
- Mechanical parameters of viscoelastic orthotropic plates are different in two mutually perpendicular directions, coinciding with the directions of the coordinate axes. In this case, there are five different relaxation nuclei. In addition, there are three rheological parameters in each relaxation core. Thus, there are 15 different rheological parameters in total.
3. Results and Discussion
3.1. Analytical Solution for an Orthotropic Viscoelastic Rectangular Plate of Variable Thickness
3.2. Proposed Numerical Solution
3.3. Numerical Results
3.3.1. Behavior of the Plate versus Viscoelastic and Inhomogeneous Properties of the Material
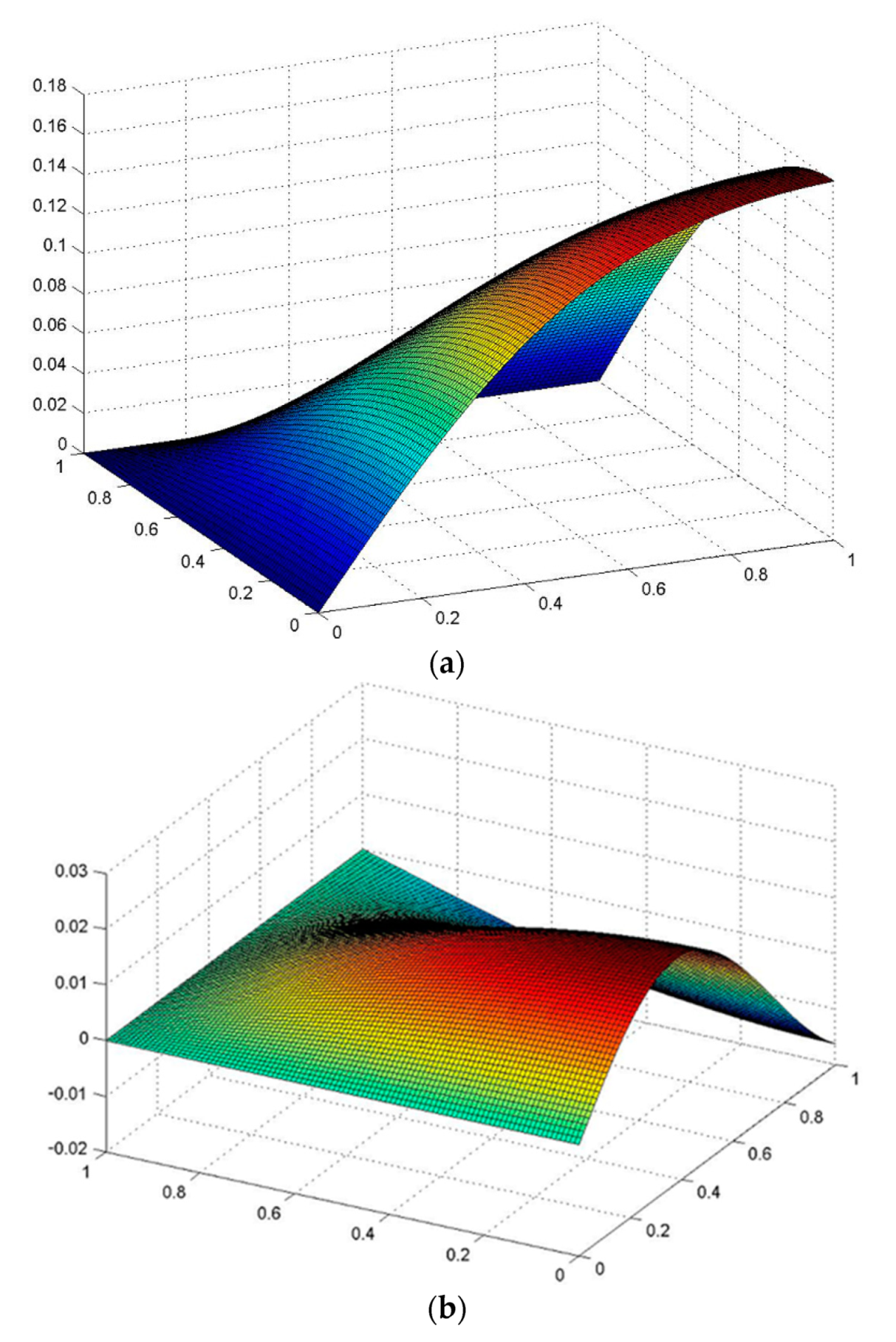
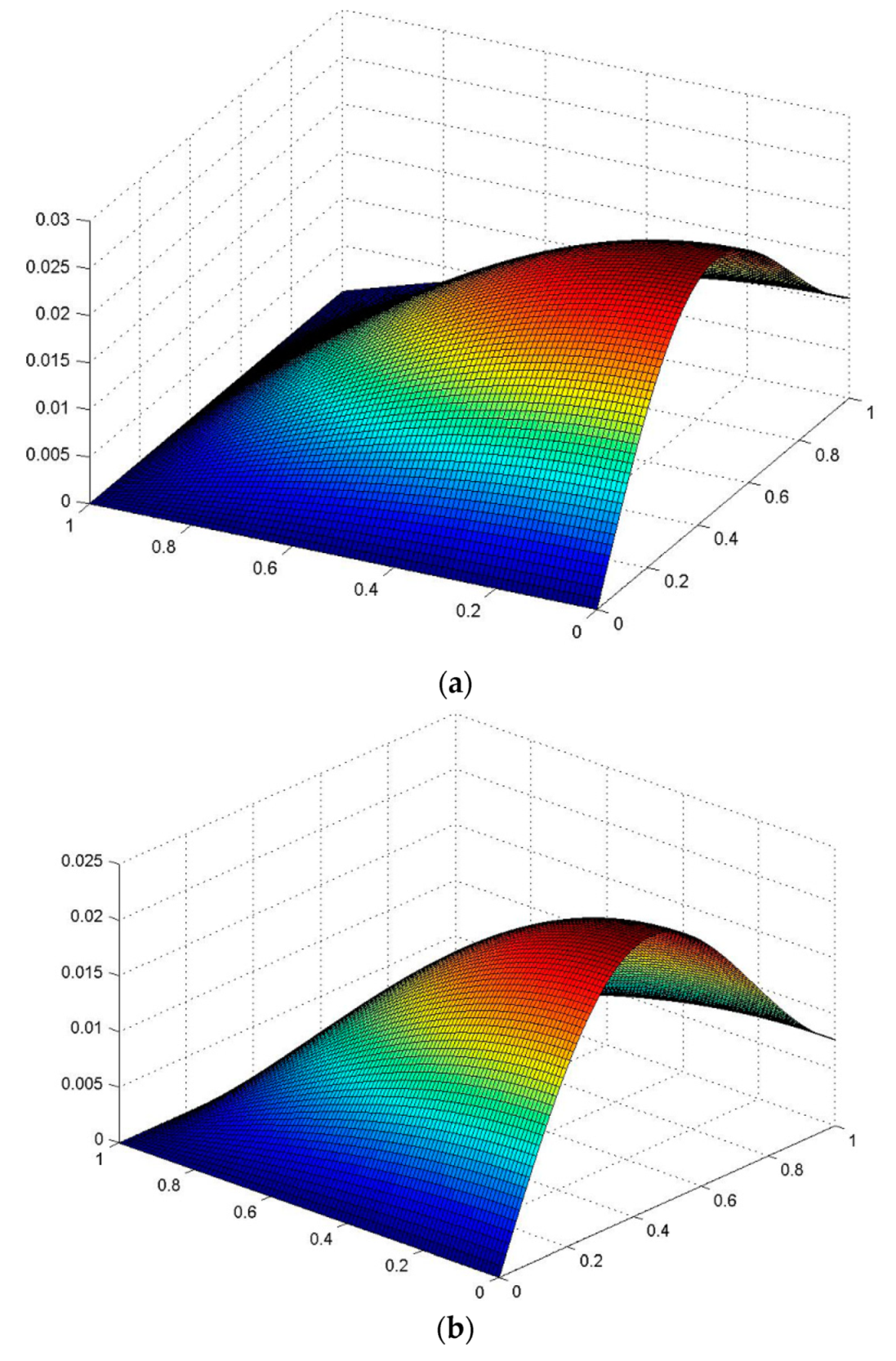
3.3.2. Behavior of the Plate at Various Thicknesses of the Plate
3.3.3. Behavior of the Plate at Various Boundary Conditions
- (i)
- (ii)
4. Conclusions
- The dynamic stability of an orthotropic viscoelastic rectangular plate of variable thickness, considering the geometric nonlinearity under the action of periodic loads, was described by a nonlinear system of integrodifferential equations.
- The application of Bubnov–Galerkin method, based on a polynomial approximation of the deflection and displacements, with the following discretization of spatial variables at each moment of time, reduces the problem of dynamic stability of an orthotropic viscoelastic rectangular plate of variable thickness to solving a nondecaying system of ordinary nonlinear integrodifferential equations with weakly singular kernels with variable coefficients.
- The proposed numerical method for solving a nondecaying system of nonlinear integrodifferential equations with variable coefficients with weakly singular kernels, using the algorithm for eliminating singularities of integrodifferential equations with a singular kernel of the Koltunov–Rzhanitsyn type, based on the use of quadrature formulas, is effective for solving problems of dynamic stability of orthotropic viscoelastic plates.
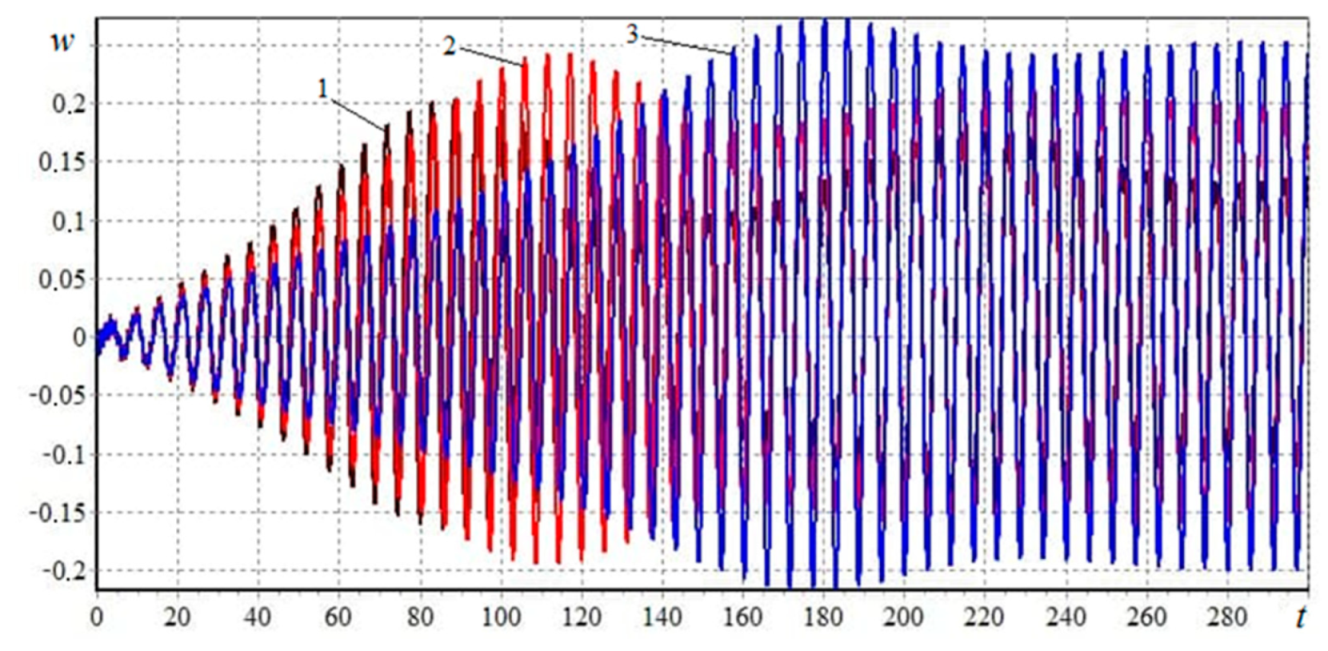
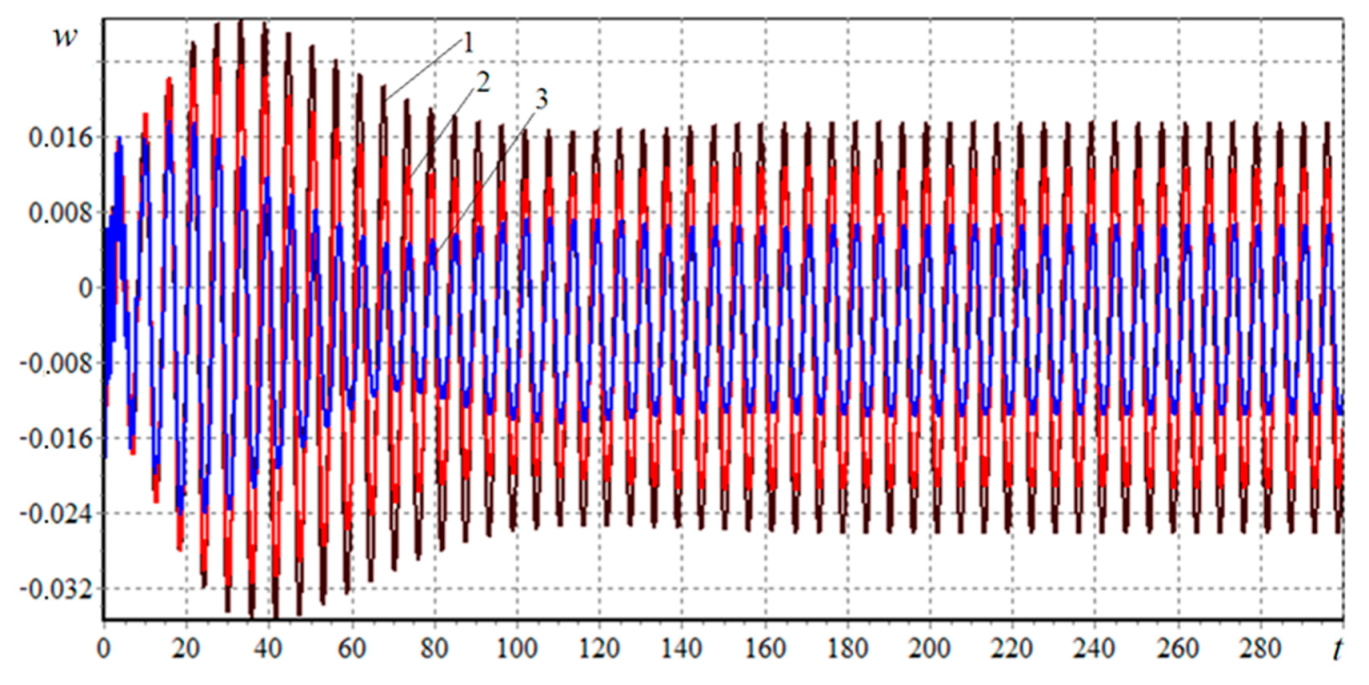
- It was found that an increase in the value of the rheological parameter α of the Koltunov–Rzhanitsyn core leads to an increase in the vibration amplitude. In this case, α plays an essential role in comparison with the parameter β. Parameter β has no significant effect on the change in the amplitude of the oscillation.
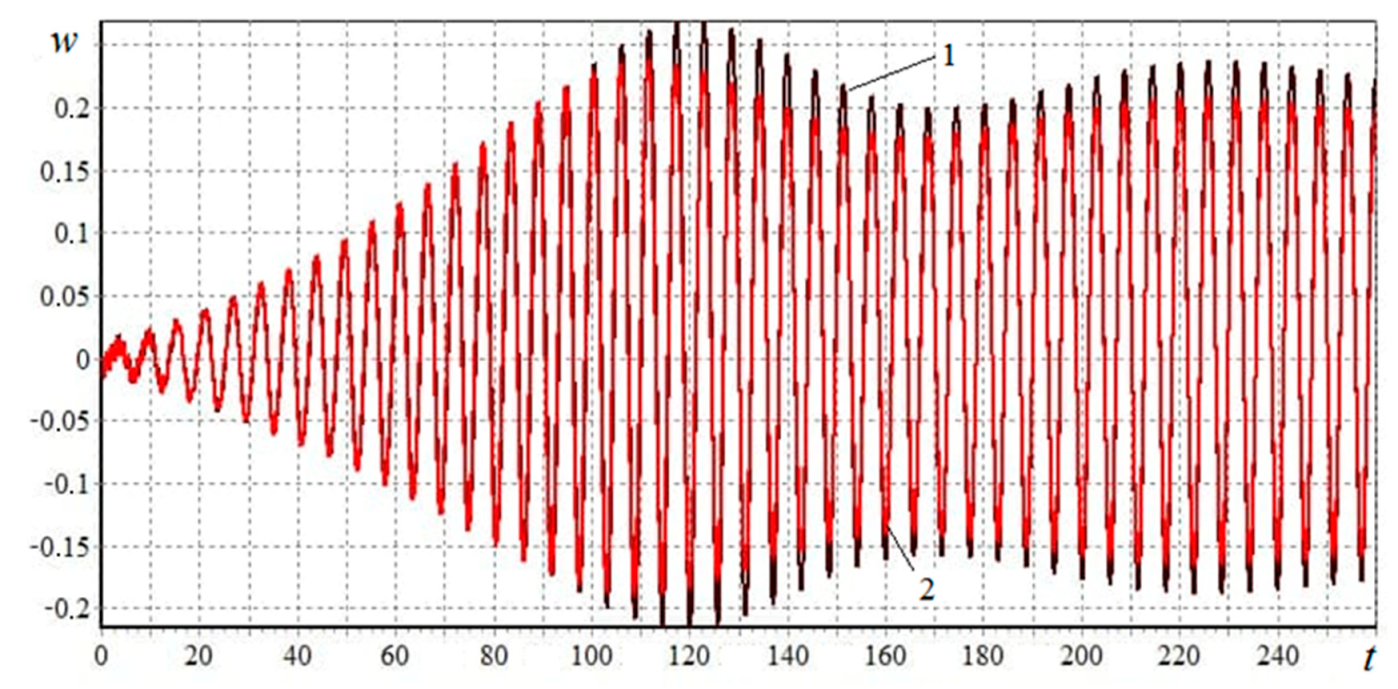
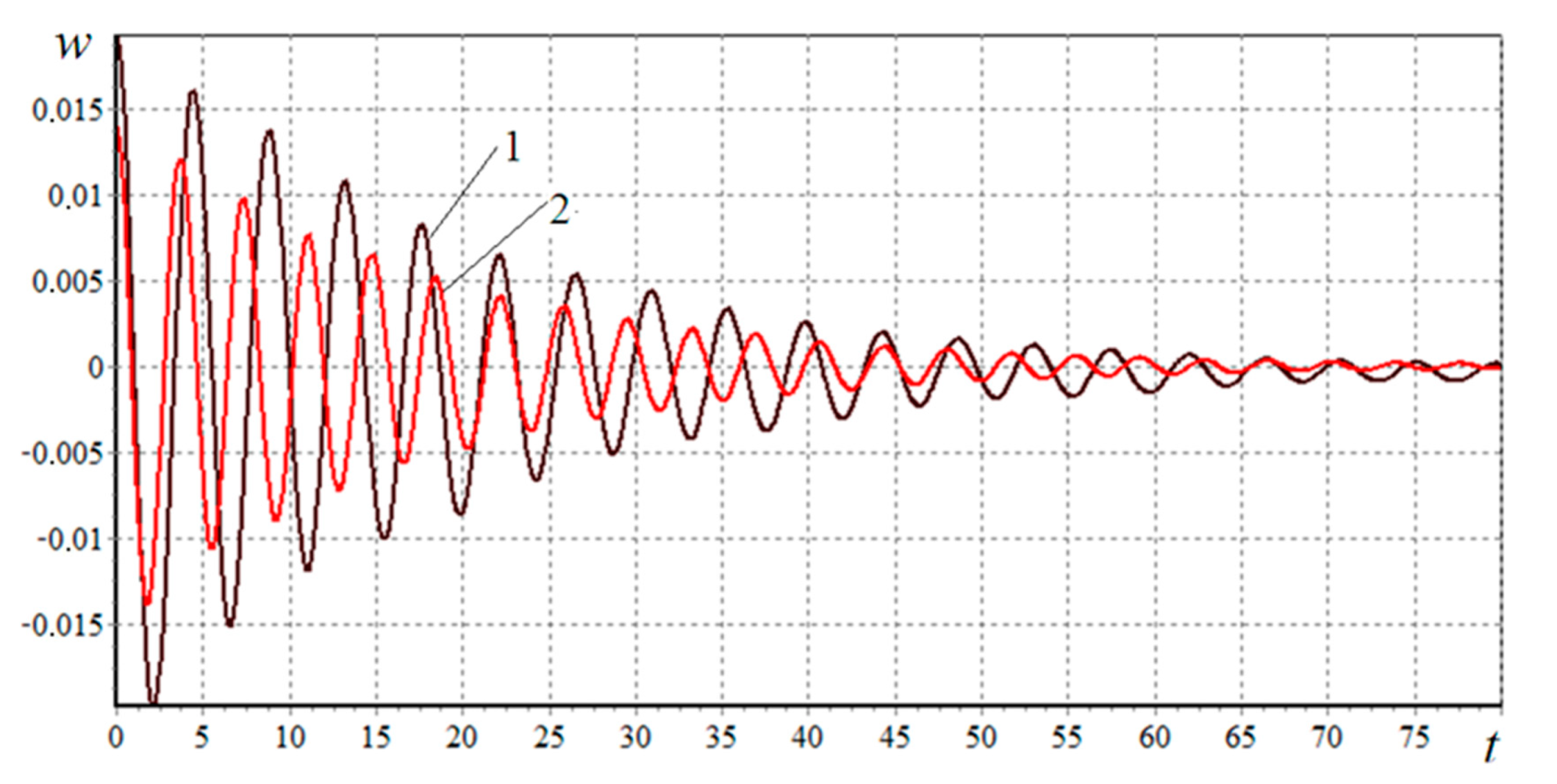
- It was found that the results of the viscoelastic problem obtained using the exponential relaxation kernel almost coincide with the results of the elastic problem. Using the Koltunov–Rzhanitsyn kernel, the differences between elastic and viscoelastic problems turn out to be very significant and amount to more than 40%.
- The proposed method can be used for various viscoelastic thin-walled structures such as plates, panels, and shells of variable thickness.
- The developed technique for studying vibrations of a viscoelastic orthotropic plate of variable thickness is easily extended to other types of laws of thickness variation, in the case of specifying in an analytical form the law of thickness variation in one or two directions of the coordinate axes.
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Bolotin, V.V. The Dynamic Stability of Elastic Systems; Holden-Day: San Francisco, CA, USA, 1964; ISBN 978-1114366091. [Google Scholar]
- Volmir, A.S. Stability of Deformable Systems; NASA AD-7169388; Defense Technical Information Center: Fort Belvoir, VA, USA, 1965.
- Sahu, S.K.; Datta, P.K. Research Advances in the Dynamic Stability Behavior of Plates and Shells: 1987–2005—Part I: Conservative Systems. Appl. Mech. Rev. 2007, 60, 65–75. [Google Scholar] [CrossRef]
- Amabili, M. Vibrations of Isotropic and Laminated Composite Circular Cylindrical Shells. In Nonlinear Mechanics of Shells and Plates in Composite, Soft and Biological Materials; Cambridge University Press: New York, NY, USA, 2018. [Google Scholar]
- Amabili, M. Nonlinear Vibrations and Stability of Shells and Plates: Amabili; Marco: 9780521883290: Amazon.com: Books; Cambridge University Press: New York, NY, USA, 2018; ISBN 978-0521883290. [Google Scholar]
- Alijani, F.; Amabili, M. Non-linear vibrations of shells: A literature review from 2003 to 2013. Int. J. Non-Linear Mech. 2014, 58, 233–257. [Google Scholar] [CrossRef] [Green Version]
- Amabili, M. Nonlinear vibrations of viscoelastic rectangular plates. J. Sound Vib. 2016, 362, 142–156. [Google Scholar] [CrossRef]
- Amabili, M. Nonlinear damping in nonlinear vibrations of rectangular plates: Derivation from viscoelasticity and experimental validation. J. Mech. Phys. Solids 2018, 118, 275–292. [Google Scholar] [CrossRef]
- Amabili, M.; Balasubramanian, P.; Ferrari, G. Nonlinear vibrations and damping of fractional viscoelastic rectangular plates. Nonlinear Dyn. 2020. [Google Scholar] [CrossRef]
- Balasubramanian, P.; Ferrari, G.; Amabili, M. Identification of the viscoelastic response and nonlinear damping of a rubber plate in nonlinear vibration regime. Mech. Syst. Signal Process. 2018, 111, 376–398. [Google Scholar] [CrossRef]
- Lu, Y.; Shao, Q.; Amabili, M.; Yue, H.; Guo, H. Nonlinear vibration control effects of membrane structures with in-plane PVDF actuators: A parametric study. Int. J. Nonlinear Mech. 2020, 122, 103466. [Google Scholar] [CrossRef]
- Darabi, M.; Ganesan, R. Nonlinear dynamic instability analysis of laminated composite thin plates subjected to periodic in-plane loads. Nonlinear Dyn. 2018, 91, 187–215. [Google Scholar] [CrossRef]
- Huynh, H.Q.; Nguyen, H.; Nguyen, H.L.T. Non-linear parametric vibration and dynamic instability of laminated composite plates using extended dynamic stiffness method. J. Eng. Technol. 2017, 6, 170–185. [Google Scholar]
- Souad, H.; Ismail, M.; Hichem, A.; Noureddine, E. Vibration analysis of viscoelastic fgm nanoscale plate resting on viscoelastic medium using higher-order theory. Period. Polytech. Civ. Eng. 2021, 65, 255–275. [Google Scholar] [CrossRef]
- Kumar, R.; Dutta, S.C.; Panda, S.K. Linear and non-linear dynamic instability of functionally graded plate subjected to non-uniform loading. Compos. Struct. 2016, 154, 219–230. [Google Scholar] [CrossRef]
- Kumar, R.; Mondal, S.; Guchhait, S.; Jamatia, R. Analytical approach for dynamic instability analysis of functionally graded skew plate under periodic axial compression. Int. J. Mech. Sci. 2017, 130, 41–51. [Google Scholar] [CrossRef]
- Wu, H.; Yang, J.; Kitipornchai, S. Parametric instability of thermo-mechanically loaded functionally graded graphene reinforced nanocomposite plates. Int. J. Mech. Sci. 2018, 135, 431–440. [Google Scholar] [CrossRef] [Green Version]
- Pirmoradian, M.; Torkan, E.; Karimpour, H. Parametric resonance analysis of rectangular plates subjected to moving inertial loads via IHB method. Int. J. Mech. Sci. 2018, 142–143, 191–215. [Google Scholar] [CrossRef]
- Zhang, D.-B.; Tang, Y.-Q.; Chen, L.-Q. Internal resonance in parametric vibrations of axially accelerating viscoelastic plates. Eur. J. Mech. A Solids 2019, 75, 142–155. [Google Scholar] [CrossRef]
- Kurpa, L.; Mazur, O.; Tkachenko, V. Parametric vibration of laminated plates with complex shape. In Proceedings of the Dynamical systems. Analytical/Numerical Methods, Stability, Bifurcation and Chaos, Łódź, Poland, 5–8 December 2011; pp. 289–294. [Google Scholar]
- Awrejcewicz, J.; Kurpa, L.; Mazur, O. Dynamical instability of laminated plates with external cutout. Int. J. Nonlinear Mech. 2016, 81, 103–114. [Google Scholar] [CrossRef] [Green Version]
- Kurpa, L.; Mazur, O.; Tkachenko, V. Dynamical stability and parametrical vibrations of the laminated plates with complex shape. Lat. Am. J. Solids Struct. 2013, 10, 175–188. [Google Scholar] [CrossRef] [Green Version]
- Kurpa, L.V.; Mazur, O.S. Method of R-function for investigation of parametric vibrations of orthotropic plates of complex shape. J. Math. Sci. 2011, 174, 269. [Google Scholar] [CrossRef]
- Kurpa, L.; Mazur, O.; Tkachenko, V. Investigation of the Parametric Vibrations of Laminated Plates by RFM. In Proceedings of the Proceedings of the 5 th International Conference on Nonlinear Dynamics, Kharkov, Ukraine, 27–30 September 2016. [Google Scholar]
- Awrejcewicz, J.; Kurpa, L.; Mazur, O. On the Parametric Vibrations and Meshless Discretization of Orthotropic Plates with Complex Shape. Int. J. Nonlinear Sci. Numer. Simul. 2010, 11, 371–386. [Google Scholar] [CrossRef] [Green Version]
- Kurpa, L.V.; Mazur, O.S.; Tkachenko, V.V. Parametric vibration of multilayer plates of complex shape. J. Math. Sci. 2014, 203, 165–184. [Google Scholar] [CrossRef] [Green Version]
- Kurpa, L.V.; Mazur, O.S. Parametric vibrations of orthotropic plates with complex shape. Int. Appl. Mech. 2010, 46, 438–449. [Google Scholar] [CrossRef]
- Chen, W.-R.; Chen, C.-S.; Shyu, J.-H. Stability of parametric vibrations of laminated composite plates. Appl. Math. Comput. 2013, 223, 127–138. [Google Scholar] [CrossRef]
- Kosheleva, E. Dynamic stability of a viscoelastic plate. MATEC Web Conf. 2017, 117. [Google Scholar] [CrossRef] [Green Version]
- Awrejcewicz, J.; Krys’ko, A.V. Analysis of complex parametric vibrations of plates and shells using Bubnov-Galerkin approach. Arch. Appl. Mech. 2003, 73, 495–504. [Google Scholar] [CrossRef]
- Ramu, I.; Mohanty, S.C. Vibration and Parametric Instability of Functionally Graded Material Plates. J. Mech. Des. Vib. 2014, 2, 102–110. [Google Scholar] [CrossRef]
- Eshmatov, B.K. Nonlinear vibrations and dynamic stability of viscoelastic orthotropic rectangular plates. J. Sound Vib. 2007, 300, 709–726. [Google Scholar] [CrossRef]
- Eshmatov, B.K.; Eshmatov, K.; Khodzhaev, D.A. Nonlinear flutter of viscoelastic rectangular plates and cylindrical panels of a composite with a concentrated masses. J. Appl. Mech. Tech. Phys. 2013, 54, 578–587. [Google Scholar] [CrossRef]
- Éshmatov, B.K. Nonlinear vibration analysis of viscoelastic plates based on a refined Timoshenko theory. Int. Appl. Mech. 2006, 42, 596–605. [Google Scholar] [CrossRef]
- Éshmatov, B.K. Dynamic stability of viscoelastic plates under increasing compressing loads. J. Appl. Mech. Tech. Phys. 2006, 47, 289–297. [Google Scholar] [CrossRef]
- Stojanović, V.; Petković, M.D.; Deng, J. Stability of parametric vibrations of an isolated symmetric cross-ply laminated plate. Compos. Part B Eng. 2019, 167, 631–642. [Google Scholar] [CrossRef]
- Reddy, J.N. Theory and Analysis of Elastic Plates and Shells, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2006; ISBN 9780429127601. [Google Scholar]
- Rzhanicyn, A.R. Theory Creep; Stroyizdat: Moskow, Russia, 1968. [Google Scholar]
- Elements of Hereditary Solid Mechanics, 1st ed.; MIR Publishers: Moscow, Russia, 1980; ISBN 978-0714714578.
- Koltunov, M.A. Choice of kernels in solving problems involving creep and relaxation. Polym. Mech. 1966, 2, 303–311. [Google Scholar] [CrossRef]
- Koltunov, M.A. Creep and Relaxation; Visshaya Shkola: Moscow, Russia, 1976. [Google Scholar]
- Badalov, F.B. Methods for Solving Integral and Integro-Differential Equations of the Hereditary Theory of Viscoelasticity; Tashkent, P., Ed.; Mehnat: Tashkent, Uzbekistan, 1987. [Google Scholar]
- Mirsaidov, M.M.; Abdikarimov, R.A.; Vatin, N.I.; Zhgutov, V.M.; Khodzhaev, D.A.; Normuminov, B.A. Nonlinear parametric oscillations of viscoelastic plate of variable thickness. Mag. Civ. Eng. 2018, 82, 112–126. [Google Scholar] [CrossRef]
- Abdikarimov, R.; Khodzhaev, D.; Vatin, N. To Calculation of Rectangular Plates on Periodic Oscillations. MATEC Web Conf. 2018, 245. [Google Scholar] [CrossRef] [Green Version]
- Normuminov, B.; Abdikarimov, R.; Khodzhaev, D.; Khafizova, Z. Parametric oscillations of viscoelastic orthotropic plates of variable thickness. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Vladimir, Russia, 7–9 April 2020; Volume 896. [Google Scholar]
- Volmir, A.S. The Nonlinear Dynamics of Plates and Shells; Foreign Technology Division Wright-Patterson Air Force: Dayton, OH, USA, 1974. [Google Scholar]
- Ambartsumyan, S.A. Theory of Anisotropic Plates: Strength, Stability, & Vibrations; CRC Press: Boca Raton, FL, USA, 1991; ISBN 978-0891166542. [Google Scholar]
- Abdikarimov, R.A.; Khodzhaev, D.A. Computer modeling of tasks in dynamics of viscoelastic thinwalled elements in structures of variable thickness. Mag. Civ. Eng. 2014, 49, 83–94. [Google Scholar] [CrossRef]
- Mal’tsev, L.E. The analytical determination of the Rzhanitsyn-Koltunov nucleus. Mech. Compos. Mater. 1979, 15, 131–133. [Google Scholar] [CrossRef]
- Courant, R. Differential and Integral Calculus, 2nd ed.; Wiley: New York, NY, USA, 1988; Volume 1, ISBN 978-0-471-60842-4. [Google Scholar]
- Ray, M.C.; Mallik, N. Finite element analysis of smart structures containing piezoelectric fiber-reinforced composite actuator. AIAA J. 2004, 42, 1398–1405. [Google Scholar] [CrossRef]
- Moita, J.S.; Araújo, A.L.; Mota Soares, C.M.; Mota Soares, C.A. Finite element model for damping optimization of viscoelastic sandwich structures. Adv. Eng. Softw. 2013, 66, 34–39. [Google Scholar] [CrossRef]
- Wang, Y.Z.; Tsai, T.J. Static and dynamic analysis of a viscoelastic plate by the finite element method. Appl. Acoust. 1988, 25, 77–94. [Google Scholar] [CrossRef]
- Rouzegar, J.; Abbasi, A. A refined finite element method for bending analysis of laminated plates integrated with piezoelectric fiber-reinforced composite actuators. Acta Mech. Sin. Xuebao 2018, 34, 689–705. Available online: https://link.springer.com/article/10.1007 (accessed on 28 June 2021). [CrossRef]
- Rouzegar, J.; Davoudi, M. Forced vibration of smart laminated viscoelastic plates by RPT finite element approach. Acta Mech. Sin. 2020, 36, 933–949. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdikarimov, R.; Amabili, M.; Vatin, N.I.; Khodzhaev, D. Dynamic Stability of Orthotropic Viscoelastic Rectangular Plate of an Arbitrarily Varying Thickness. Appl. Sci. 2021, 11, 6029. https://doi.org/10.3390/app11136029
Abdikarimov R, Amabili M, Vatin NI, Khodzhaev D. Dynamic Stability of Orthotropic Viscoelastic Rectangular Plate of an Arbitrarily Varying Thickness. Applied Sciences. 2021; 11(13):6029. https://doi.org/10.3390/app11136029
Chicago/Turabian StyleAbdikarimov, Rustamkhan, Marco Amabili, Nikolai Ivanovich Vatin, and Dadakhan Khodzhaev. 2021. "Dynamic Stability of Orthotropic Viscoelastic Rectangular Plate of an Arbitrarily Varying Thickness" Applied Sciences 11, no. 13: 6029. https://doi.org/10.3390/app11136029
APA StyleAbdikarimov, R., Amabili, M., Vatin, N. I., & Khodzhaev, D. (2021). Dynamic Stability of Orthotropic Viscoelastic Rectangular Plate of an Arbitrarily Varying Thickness. Applied Sciences, 11(13), 6029. https://doi.org/10.3390/app11136029