
Online Prognosis of Bimodal Crack Evolution for Fatigue Life Prediction of Composite Laminates Using Particle Filters

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Proposed Prognostic Framework
2.1. Degradation Dataset
2.2. Damage Propagation Model
2.3. Particle Filter Based Prognosis
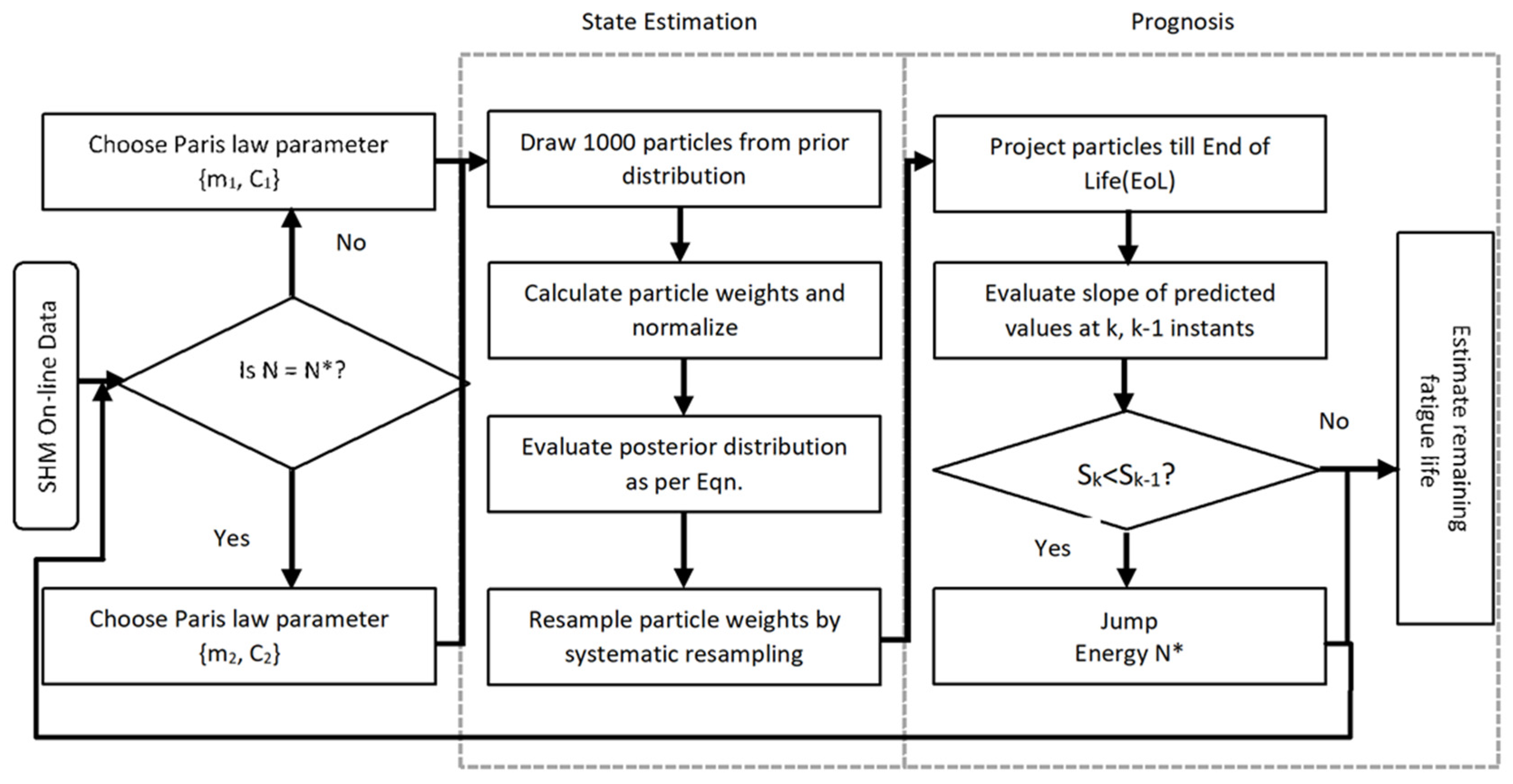
2.3.1. State Estimation
2.3.2. Prognosis
2.4. Online Real-Time Prognostic Framework
3. Results and Discussion
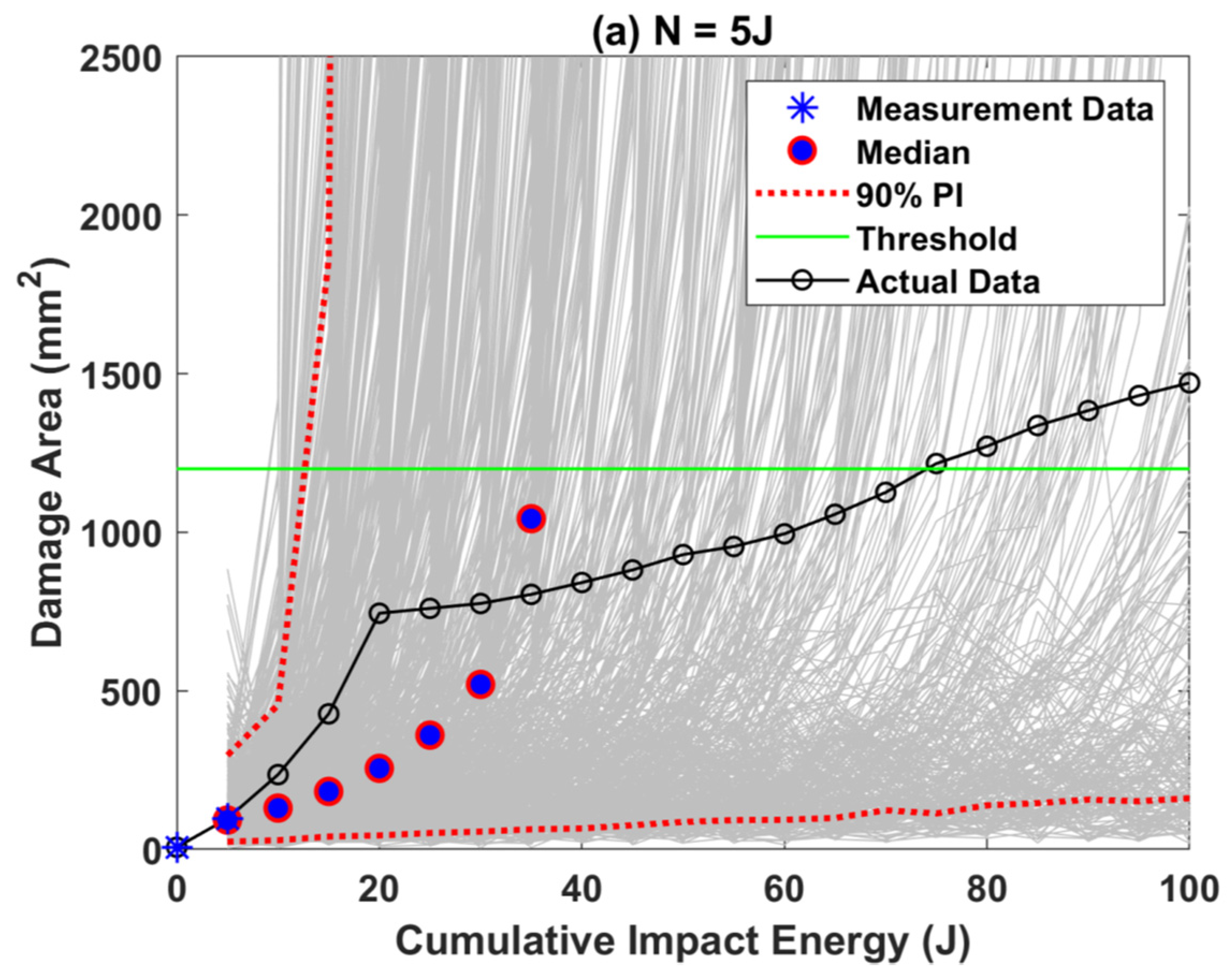
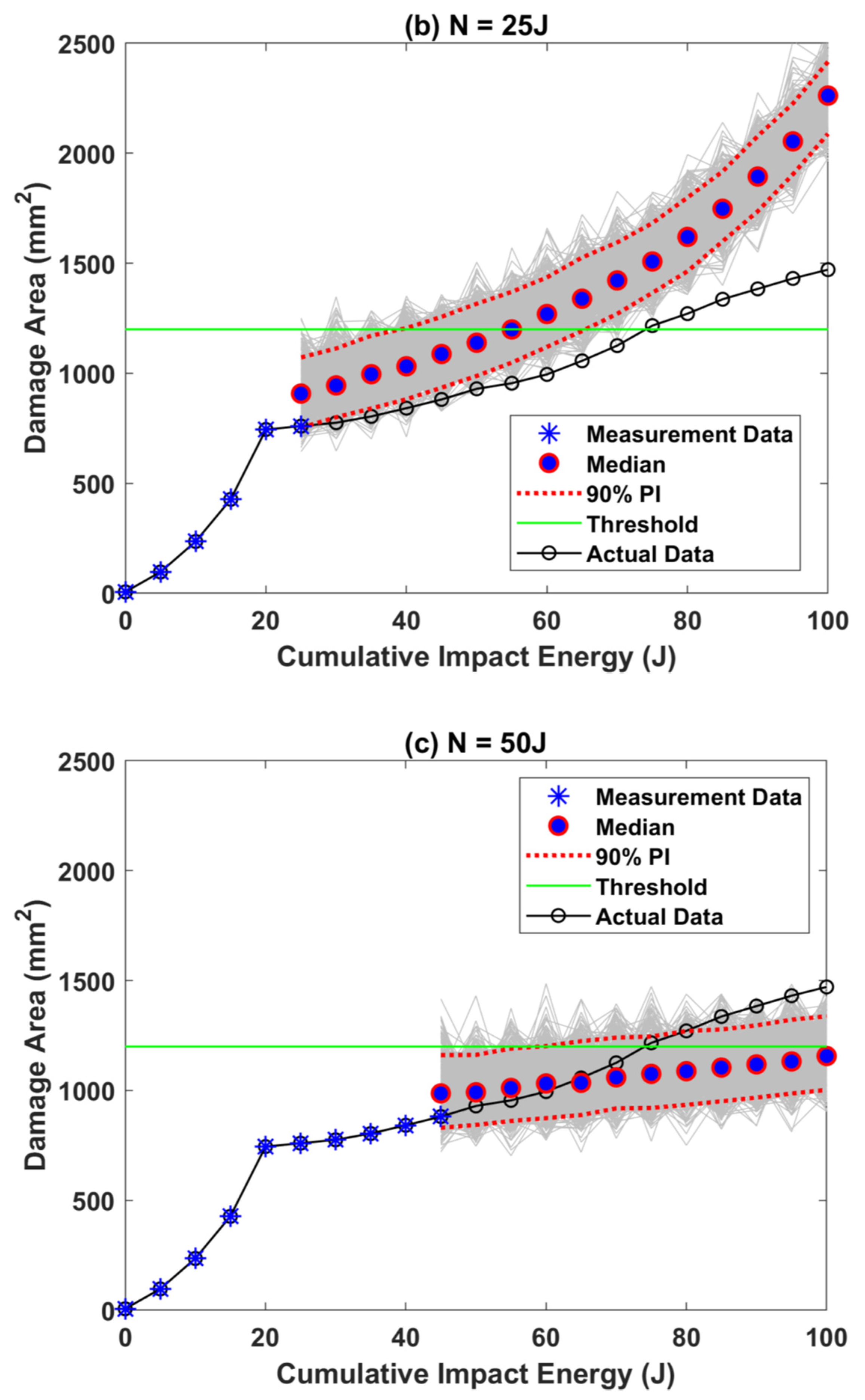
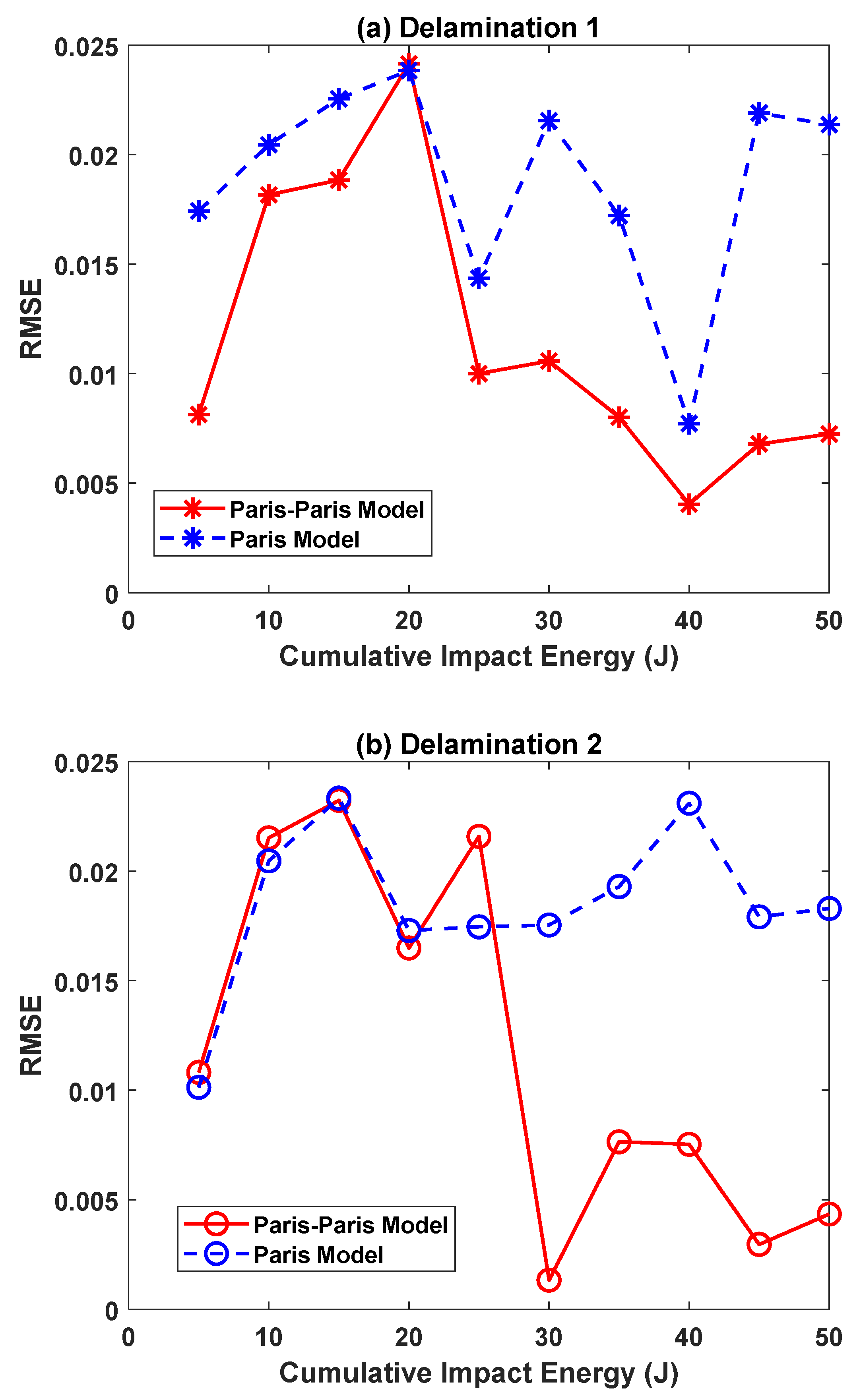
3.1. RUL Estimation Using Paris–Paris Model
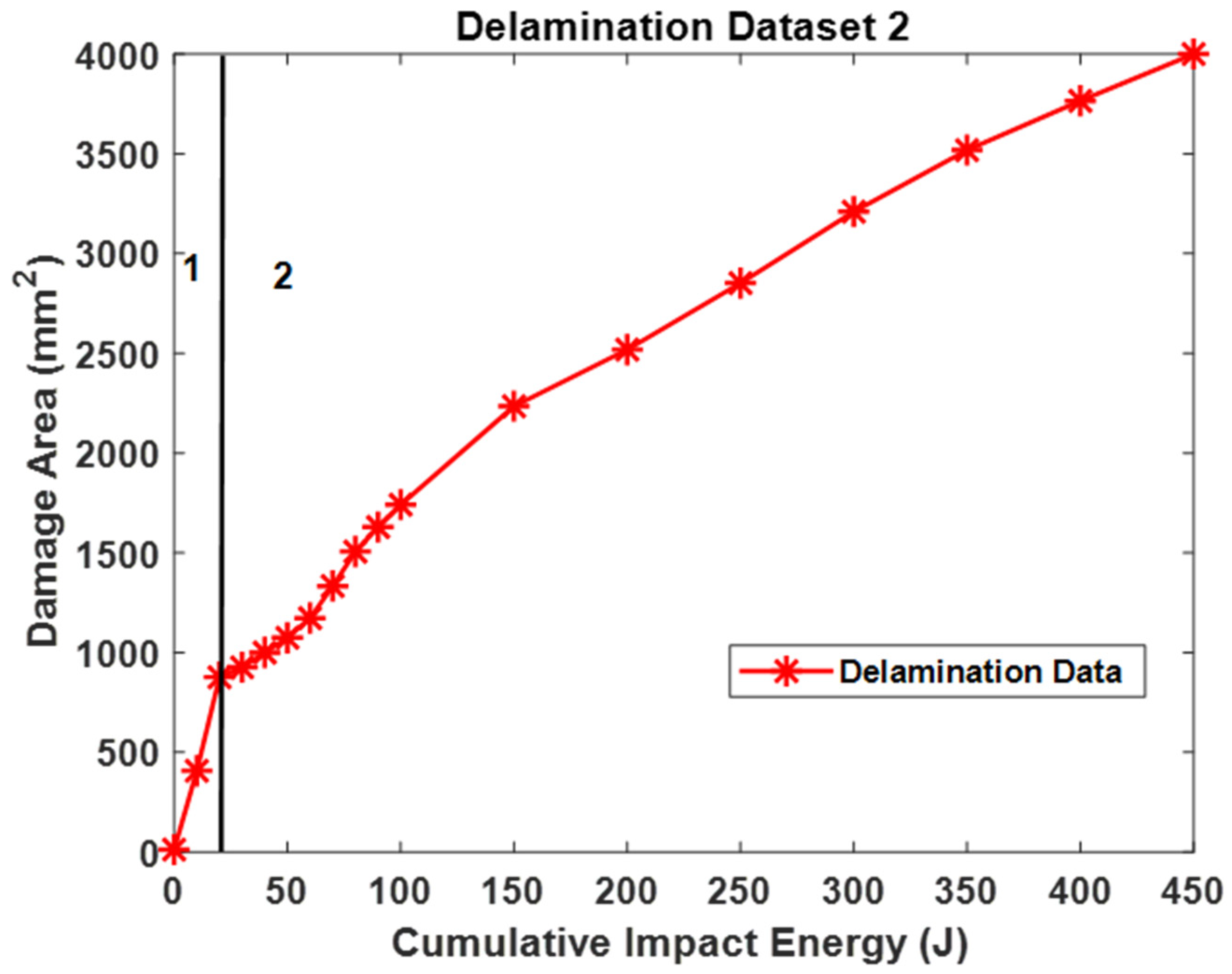
3.2. Delamination Dataset–2
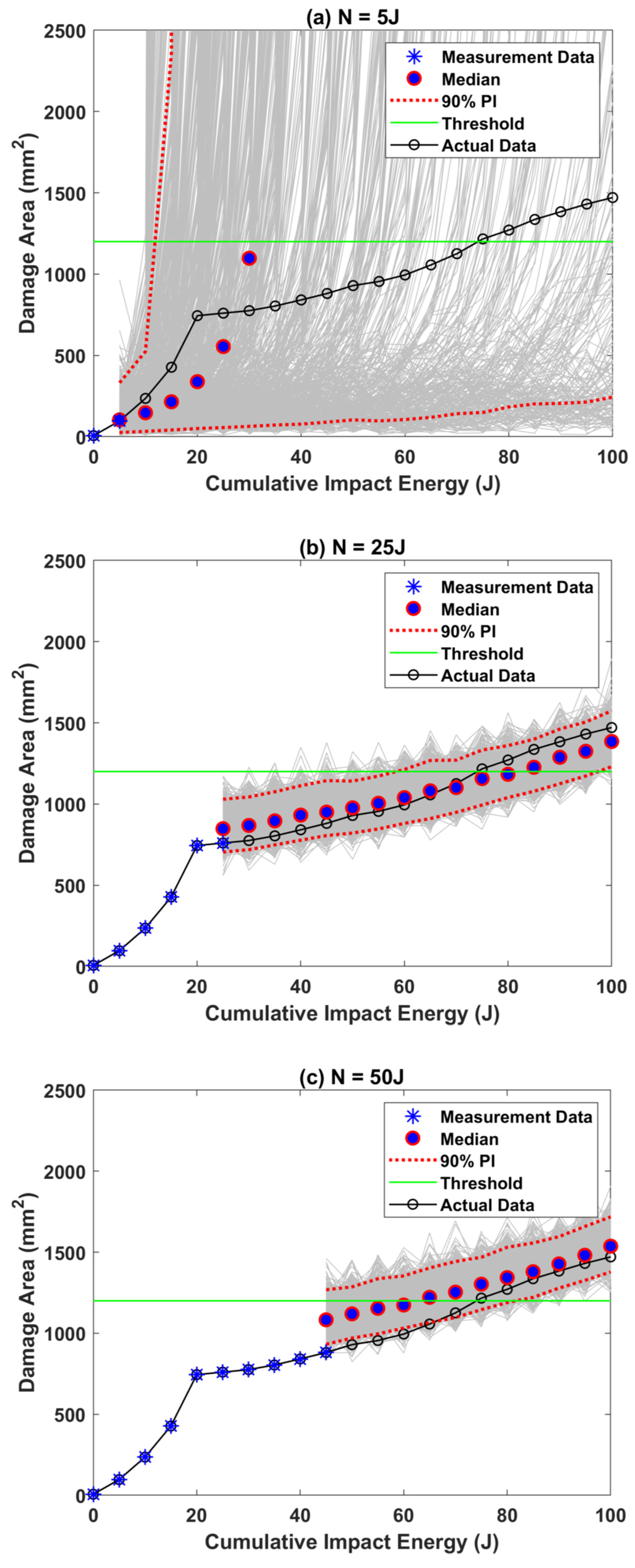
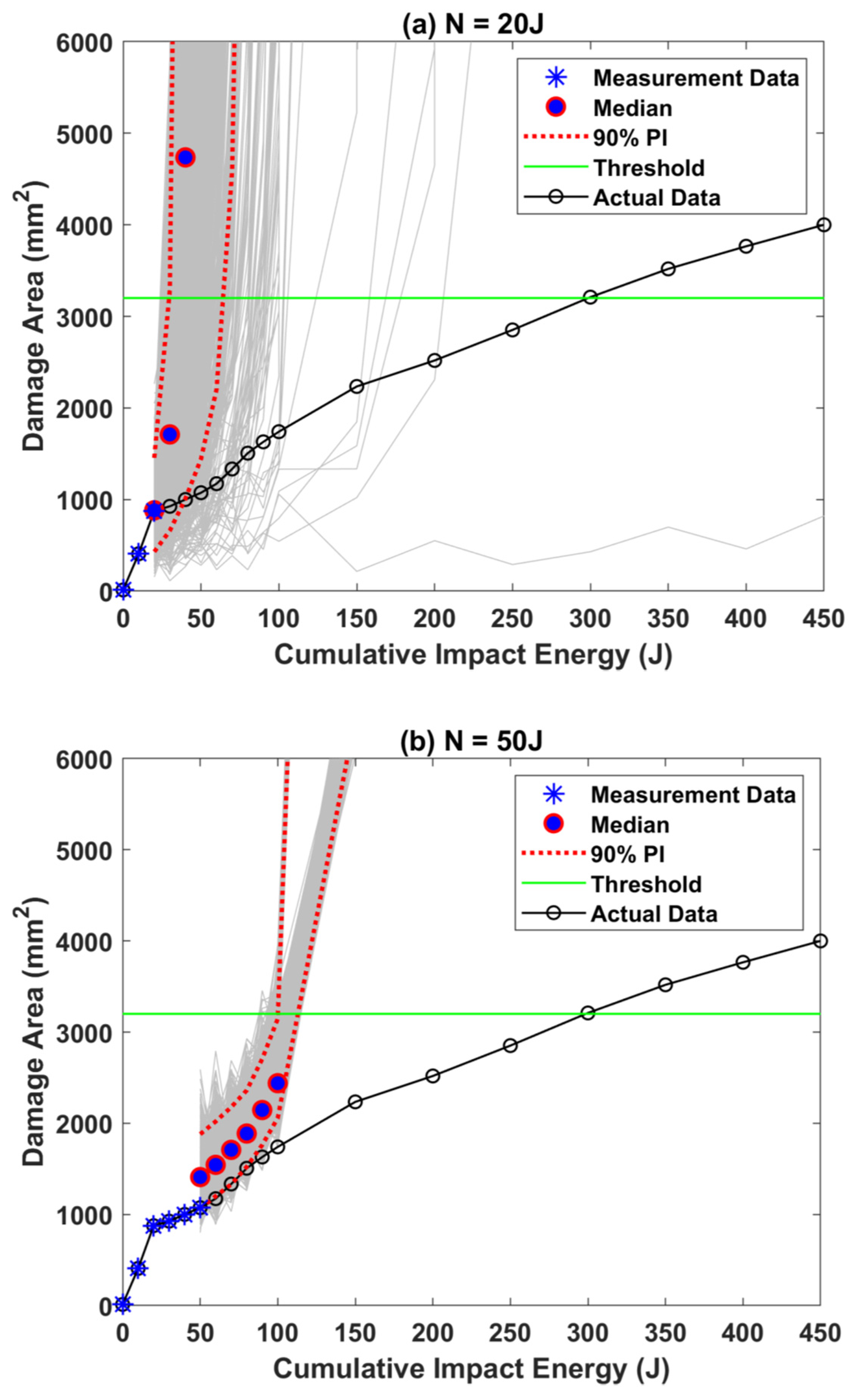
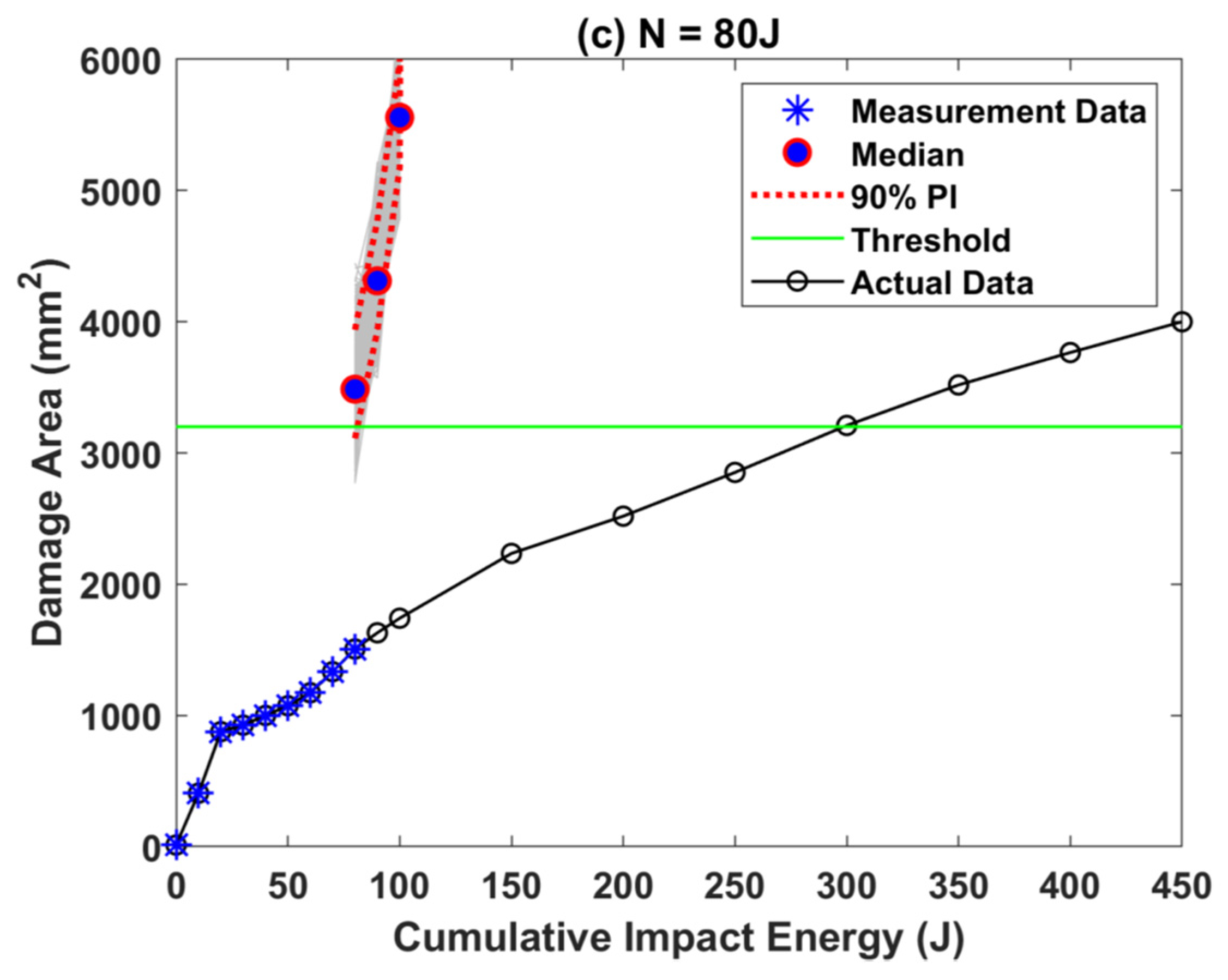
3.3. RUL Estimation for Dataset–2
4. Remaining Useful Life Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ansari, M.T.A.; Singh, K.K.; Azam, M.S. Fatigue damage analysis of fiber-reinforced polymer composites—A review. J. Reinf. Plast. Compos. 2018, 37, 636–654. [Google Scholar] [CrossRef]
- Singh, J.; Kumar, M.; Kumar, S.; Mohapatra, S.K. Properties of glass-fiber hybrid composites: A review. Polym.-Plast. Technol. Eng. 2018, 56, 455–469. [Google Scholar] [CrossRef]
- Li, X.; Ma, D.; Liu, H.; Tan, W.; Gong, X.; Zhang, C.; Li, Y. Assessment of failure criteria and damage evolution methods for composite laminates under low-velocity impact. Compos. Struct. 2019, 207, 727–739. [Google Scholar] [CrossRef]
- Mehdikhani, M.; Gorbatikh, L.; Verpoest, I.; Lomov, S.V. Voids in fiber-reinforced polymer composites: A review on their formation, characteristics, and effects on mechanical performance. J. Compos. Mater. 2019, 53, 1579–1669. [Google Scholar] [CrossRef]
- Zio, E.; Peloni, G. Particle filtering prognostic estimation of the remaining useful life of nonlinear components. Reliab. Eng. Syst. Saf. 2019, 96, 403–409. [Google Scholar] [CrossRef]
- Orchard, M.E.; Vachtsevanos, G.J. A particle-filtering approach for on-line fault diagnosis and failure prognosis. Trans. Inst. Meas. Control. 2009, 31, 221–246. [Google Scholar] [CrossRef]
- Chiachıo, J.; Chiachıo, M.; Saxena, A.; Rus, G.; Goebel, K. A model-based prognostics framework to predict fatigue damage evolution and reliability in composites. In Proceedings of the 2nd European Conference of the Prognostics and Health Management Society, Nantes, France, 8–11 July 2014; pp. 732–742. [Google Scholar]
- Chiachío, J.; Chiachío, M.; Saxena, A.; Sankararaman, S.; Rus, G.; Goebel, K. Bayesian model selection and parameter estimation for fatigue damage progression models in composites. Int. J. Fatigue 2015, 70, 361–373. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H.P.; Liu, J.; Zio, E. Ensemble of models for fatigue crack growth prognostics. IEEE Access 2019, 7, 49527–49537. [Google Scholar] [CrossRef]
- Loutas, T.; Eleftheroglou, N.; Zarouchas, D. A data-driven probabilistic framework towards the in-situ prognostics of fatigue life of composites based on acoustic emission data. Compos. Struct. 2017, 161, 522–529. [Google Scholar] [CrossRef]
- Chen, J.; Yuan, S.; Jin, X. On-line prognosis of fatigue cracking via a regularized particle filter and guided wave monitoring. Mech. Syst. Signal. Process. 2019, 131, 1–17. [Google Scholar] [CrossRef]
- Qian, Y.; Yan, R.; Gao, R.X. A multi-time scale approach to remaining useful life prediction in rolling bearing. Mech. Syst. Signal. Process. 2017, 83, 549–567. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Gao, R.X. Multiple model particle filtering for bearing life prognosis. In Proceedings of the 2013 IEEE Conference on Prognostics and Health Management (PHM), Gaithersburg, MD, USA, 24–27 June 2013; pp. 1–6. [Google Scholar]
- El-Thalji, I.; Jantunen, E. A summary of fault modelling and predictive health monitoring of rolling element bearings. Mech. Syst. Signal. Process. 2015, 60, 252–272. [Google Scholar] [CrossRef]
- Kumar, A.; Srivastava, A.; Goel, N.; Nayak, A. Model based approach and algorithm for fault diagnosis and prognosis of coated gas turbine blades. In Proceedings of the 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, QC, Canada, 6–9 July 2010; pp. 800–805. [Google Scholar]
- Goel, N.; Kumar, A.; Narasimhan, V.; Nayak, A.; Srivastava, A. Health risk assessment and prognosis of gas turbine blades by simulation and statistical methods. In Proceedings of the 2008 Canadian Conference on Electrical and Computer Engineering, Niagara Falls, ON, Canada, 4–7 May 2008; pp. 001087–001092. [Google Scholar]
- Koul, A.K.; Bhanot, S.; Tiku, A.; Junkin, B. Improving component life prediction accuracy and reliability through physics-based prognosis: A probabilistic turbine blade case study. In Proceedings of the ASME Turbo Expo 2008: Power for Land, Sea, and Air, Berlin, Germany, 9–13 June 2008; pp. 533–539. [Google Scholar]
- Nesci, A.; Martin, A.D.; Jacazio, G.; Sorli, M. Detection and Prognosis of Propagating Faults in Flight Control Actuators for Helicopters. Aerospace 2020, 7, 20. [Google Scholar] [CrossRef] [Green Version]
- Finda, J.; Vechart, A.; Hédl, R. Prediction of fatigue crack growth in airframe structures. In Proceedings of the European Conference of Prognostics and Health Management Society, Dresden, Germany, 3–5 July 2012; pp. 1–7. [Google Scholar]
- Azaïs, R.; Abdessalem, A.B.; Touzet-Cortina, M.; Puiggali, M.; Gégout-Petit, A. Stochastic modelling and prediction of fatigue crack propagation using piecewise-deterministic Markov processes. In Proceedings of the ENBIS 2015, Prague, Czech Republic, 6–10 September 2015. [Google Scholar]
- Ben Abdessalem, A.; Azaïs, R.; Touzet-Cortina, M.; Gégout-Petit, A.; Puiggali, M. Stochastic modelling and prediction of fatigue crack propagation using piecewise-deterministic Markov processes. J. Risk Reliab. 2016, 230, 405–416. [Google Scholar] [CrossRef] [Green Version]
- Banerjee, P.; Karpenko, O.; Udpa, L.; Haq, M.; Deng, Y. Prediction of impact-damage growth in GFRP plates using particle filtering algorithm. Compos. Struct. 2018, 194, 527–536. [Google Scholar] [CrossRef]
- Banerjee, P.; Palanisamy, R.P.; Udpa, L.; Haq, M.; Deng, Y. Prognosis of fatigue induced stiffness degradation in GFRPs using multi-modal NDE data. Compos. Struct. 2019, 229, 111424. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pugalenthi, K.; Trung Duong, P.L.; Doh, J.; Hussain, S.; Jhon, M.H.; Raghavan, N. Online Prognosis of Bimodal Crack Evolution for Fatigue Life Prediction of Composite Laminates Using Particle Filters. Appl. Sci. 2021, 11, 6046. https://doi.org/10.3390/app11136046
Pugalenthi K, Trung Duong PL, Doh J, Hussain S, Jhon MH, Raghavan N. Online Prognosis of Bimodal Crack Evolution for Fatigue Life Prediction of Composite Laminates Using Particle Filters. Applied Sciences. 2021; 11(13):6046. https://doi.org/10.3390/app11136046
Chicago/Turabian StylePugalenthi, Karkulali, Pham Luu Trung Duong, Jaehyeok Doh, Shaista Hussain, Mark Hyunpong Jhon, and Nagarajan Raghavan. 2021. "Online Prognosis of Bimodal Crack Evolution for Fatigue Life Prediction of Composite Laminates Using Particle Filters" Applied Sciences 11, no. 13: 6046. https://doi.org/10.3390/app11136046
APA StylePugalenthi, K., Trung Duong, P. L., Doh, J., Hussain, S., Jhon, M. H., & Raghavan, N. (2021). Online Prognosis of Bimodal Crack Evolution for Fatigue Life Prediction of Composite Laminates Using Particle Filters. Applied Sciences, 11(13), 6046. https://doi.org/10.3390/app11136046