1. Introduction
Recently, there has been an upward trend in the popularity of Unmanned Aerial Vehicles (UAVs) in a wide range of practical applications. While large outdoor UAVs are already in application for civil, commercial or military activities, the indoor flight of small UAVs remains a challenging field of application from a scientific point of view. Inland flight requires the right type of vehicle and appropriate navigation, control and collision-avoidance algorithms. In terms of vehicle type, helicopter-like vehicles are among the most encouraging candidates in terms of their weight, low cost, size, high maneuverability, slow-flying ability and even stable hovering flight in constrained conditions. One special helicopter-like vehicle with the added advantage of plain construction and rotor mechanics is the quadrotor.
Quadrotors have received much interest in the research community, where a large number of applications are being presented and experimented. In particular, there has been a growing interest in quadcopter applications, such as object detection and landing to drone stations [
1], rescue and disasters [
2], agriculture [
3], and even other tasks, such as those reported in [
4]. It is critically essential for the success of the missions performed that the UAVs precisely and rapidly follow the required path in civilian purposes, such as logistics, mapping, search and rescue, surveillance, exploration and many more military missions, such as attack, defense, supervision and surveillance [
5,
6].
This current expansion is mostly attributed to the lower cost of on-board sensors, actuators, small-scale embedded computing platforms and simplified rotor mechanics [
7]. In spite of the significant advances, flight control is still an open topic of research. By varying the speed of the individual motors, the lift force can be varied, and lateral and/or vertical motion can be generated. However, despite the four actuators, the quadrotor is a non-linear, aerodynamically unstable system that must be stabilized by an appropriate control system. On the one hand, flight control essentially alludes to the ability to carry out highly time-sensitive sensory data acquirement, processing, and the computation of forces for application to aircraft actuators. On the other hand, to name a few, it is advisable that UAV flight controllers are able to withstand faults, adapt to changes in payload and/or the environment, and improve the flight path. UAV flight control systems are mostly implemented using Proportional-Integral-Derivative (PID) control systems. PID has shown exceptional performance in many conditions, including in the context of drone racing, where accuracy and lightness are key factors. In contrast, it has many handicaps: (1) at times, it provides a high control signal due to wind, thus overshooting and continuing to increase as the accumulated error is unwound; and (2) the differentiator leads to the amplification of noise. The PID controller system is the preferred control method [
8]. The PID controller has only three parameters, giving it an easy adjustment space to obtain a better control point [
9]. It is evident that fast response speed and high controllability can be achieved by implementing proper PID parameters [
10]. Therefore, the method of tuning PID parameters has become one of the hot research topics in the engineering field. In stable environments, a PID controller displays close to the best possible performance. When bared to unknown dynamics, such as variable payloads, wind and voltage drops, however, a PID controller can be far from optimal [
11]. On the other hand, because quadcopters are dynamically unstable, under-actuated and nonlinear systems, it is difficult to design a quadcopter’s PID controller to track a moving target, particularly under the variable speed of the moving target and under the influence of the environment. This is because any error that occurs in any of them can cause serious damage to the quadcopter.
The PID controller successfully tracks a reference altitude, despite undergoing a large overshoot on takeoff. This may be related to the ground impact, which produces an unexpectedly strong lift before the quadcopter surveys the ground. Understanding how to balance the different aspects of flight to make a quadcopter respond optimally to a particular flight style is not a simple matter that can happen overnight. Practical knowledge of PID tuning helps to achieve this easily, and the more familiar the operator is with the PID settings, the easier it is to set the codecs to fly in any way.
Conventional methods, such as Ziegler–Nichols (ZN) [
12], for the PID controller does not guarantee optimal control for a quadcopter. This method might cause system instability as well as major losses and damages to the system. Therefore, a more efficient control method is needed for the quadcopter that can make the system very stable with minimal losses and without damaging the system. A secondary goal is to achieve reliable and proper movements and directions for the quadcopter. For next-generation flight control systems to be intelligent, there is a need to devise a way to integrate adaptability to the changeable environment and dynamics. Accordingly, the evolution of intelligent flight control systems remains an active research domain [
13], concretely through the use of artificial neural networks, which are an appealing choice that have been agreed on as global approximators, and noise-resistance [
14]. Online learning methods [
15] have the merit of learning the dynamics of an aircraft in real time. The key restriction with these methods is that the flight control system is only aware of its past experiences. It follows that its performance level is constrained when exposed to an unprecedented event. Offline training models using supervised learning are problematic, as data acquisition is prohibitively expensive and derived from imprecise representations of rudimentary aircraft dynamics, which can result in suboptimal control policies [
16].
At present, many research trends in adaptive control are gradually being turned toward the use of meta-heuristic algorithms to accommodate and solve professional engineering problems [
17,
18]; these algorithms have enticed the attention of many researchers [
19]. Overall, a variety of studies have been conducted based on meta-heuristic algorithms to obtain appropriate PID parameters, such as Genetic Algorithms (GA) [
20], Particle Swarm Optimization (PSO) [
21], the Artificial Immune System (AIS) [
22] and the Kidney-Inspired Algorithm (IKA) [
23]. A PID controller designed by other meta-heuristic optimization methods was also applied in servo systems. Pršić et al. [
24] used the Firefly algorithm to adjust the three parameters of the PID controller in parallel robot platforms with six degrees of freedom gain. The Beetle Antennae Search (BAS) algorithm was adapted for use in UAV avoidance [
25], trajectory organizing and control systems [
26,
27].
Most of the previous studies show reasonable performance and results. However, they either use the Global Positioning System (GPS) to discover the location of the target, which provides inaccurate identification in indoor environments, or they use sensor fusion. Other researchers have focused more on the part of computer vision, ignoring the influence of external disturbances, such as the impact of the environment.
Objectives of the Work
The current work focuses on the PID controller of a quadcopter whose parameters are to be tuned by meta-heuristic algorithms, including Genetic Algorithms (GA) [
28], the Crow Search Algorithm (CSA) [
29,
30] and Particle Swarm Optimization (PSO) [
31,
32]. These meta-heuristics have long been accepted by the artificial intelligence community for their adequacy in solving a wide range of real applications by arriving at optimal or accurate solutions with respect to a compact set of parameters, such as time or cost [
33,
34,
35]. The optimization methods for the quadcopter PID controller, in this work, were mathematically formulated to control the movements of the quadcopter in the
x,
y and
z directions over the quadcopter coordinates. In the assessment of the performance of the optimization algorithms used in the work, such parameters as overshooting, rising time and settling time were integrated in a multi-objective fitness function in order to achieve an optimal gain for the PID controller.
The key contributions of the proposed work lie in the following: (1) overcoming the nonlinearity and instability of a quadcopter system through the use of three meta-heuristics that control the movements and directions of a quadcopter with the aim of obtaining high gain for the quadcopter’s PID controller; (2) it is expected that this will allow verification of the system performance and make a comparison between these meta-heuristics, using a set of related measures, as the second contribution; and (3) the third contribution is the comparison of the results of these meta-heuristics with the results of a traditional method.
The mathematical model used to simulate the movements of a quadcopter is given in
Section 2.
Section 3 then presents the PID controller for the quadcopter’s motors. The following
Section 4 presents a brief description of GA, CSA and PSO. The evaluation methods and experimental results are presented in
Section 6.
Section 7 then presents a statistical analysis test for the controlling methods.
Section 8 then discusses the results with closing comments, and further outlooks are given in
Section 9.
3. PID Controller
Due to the increasing number of applications and complexity of the quadcopter on a daily basis, approved control algorithms also need to progress so that they can deliver better performance and boost flexibility [
38]. In the past, modest linear control methods were accepted, due to their lower computational requirements and stable behavior. However, with advanced modeling methods and faster on-board computational power, a wide-range of nonlinear methods have been used to run in real time. The proposed nonlinear control methodologies have grown rapidly, and they provide high performance, making the quadcopter more powerful [
39,
40].
In this paper we explore one of the well-recognized controllers in industry, called the PID controller [
34,
41]. The PID controller has many merits, such as reducing the downtime, rise time, and peak error, and smoothing the movement of the output in addition to the overshoot of the system. Meanwhile, this type of controller has many difficulties in adjusting its parameters. For example, its low ability to tune P, I and D parameters may result in poor performance, slow control and, in some cases, system instability. Consequently, many types of tuning methods for the PID controller demand considerable attention from the operator to identify the optimal set of values for those parameters to reach a reasonable gain. One of the conventional methods widely used to fine-tune the parameters of the PID controller is the Zeigler–Nichols method [
12]. However, in a few past cases, this method did not produce sensible results in reducing the time response of the signal as reported in the literature.
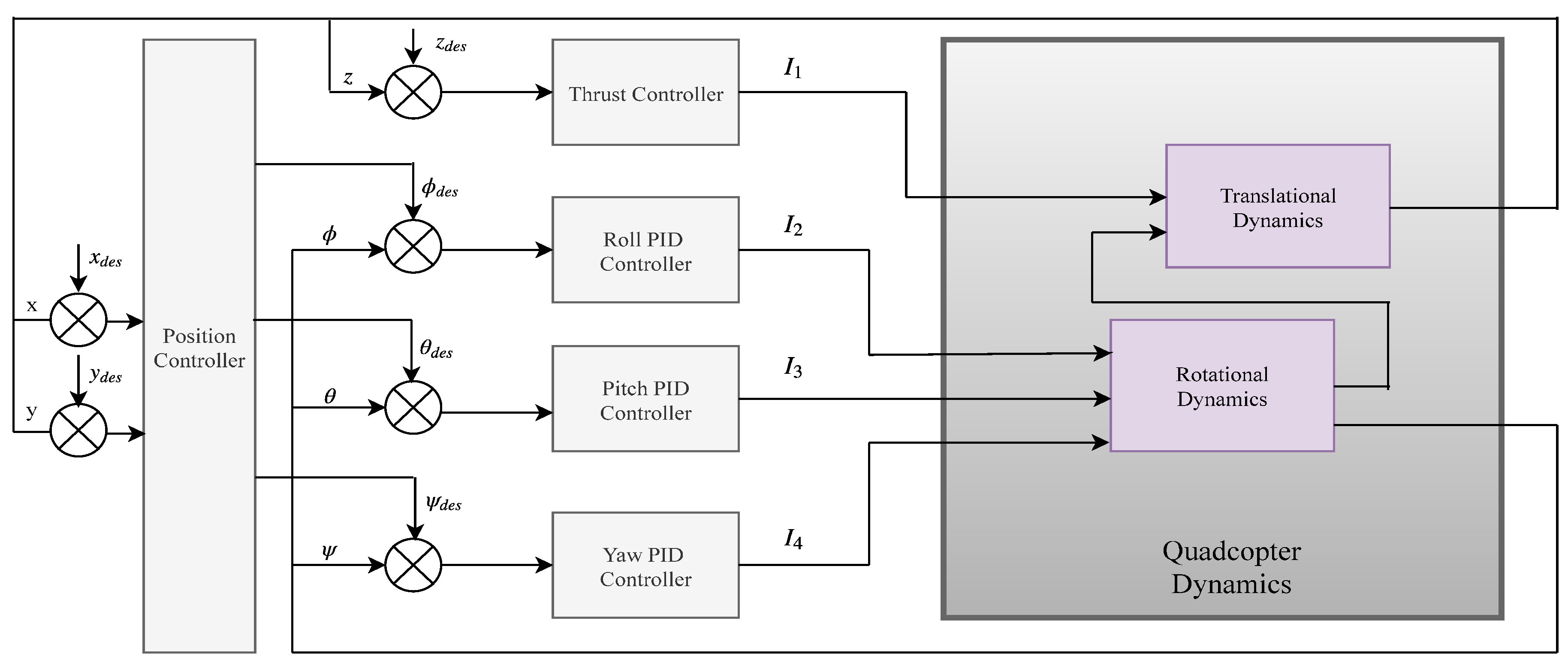
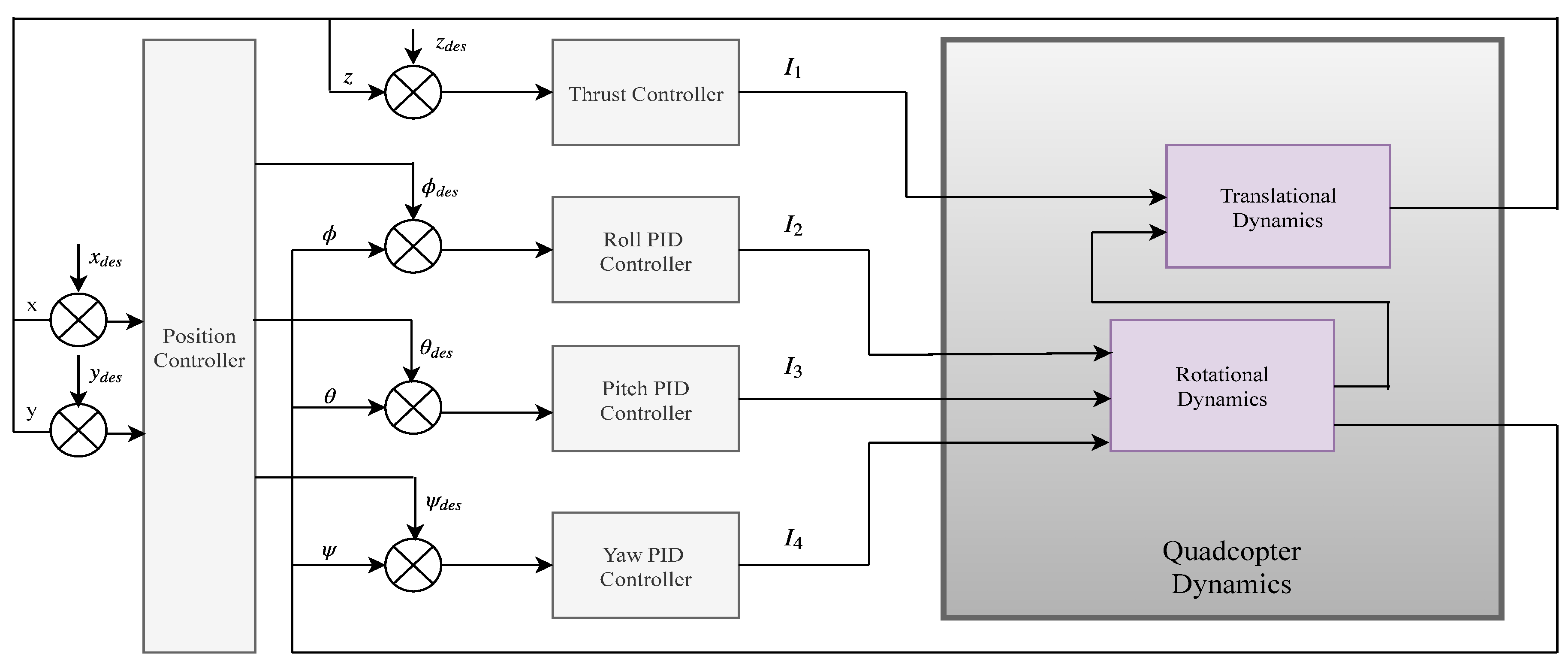
Based on the developed mathematical model for the quadcopter, the four inputs of the PID controller of the quadcopter’s motors were tuned to control the altitude, attitude, heading and position of the quadrotor in space. In this work, GAs, PSO and CSA are presented to optimize the gain of the PID controller in order to improve the system’s dynamic response.
The control function can be expressed mathematically as given in Equation (
24).
The transfer function of the PID controller is defined as presented in Equation (
25).
The transfer function is capable of capturing the dynamics of the quadcopter’s movements [
42]. Furthermore, the transfer function is utilized to demonstrate the effectiveness of the presented method. The transfer functions for the inputs of the PID controller,
,
,
and
z are defined in Equations (
26)–(29), respectively [
42].
The PID controller was designed using closed-loop feedback control in order to stabilize the closed-loop system based on pre-defined equality characteristics. The PID controller can be described by a discrete transfer function as that given in Equation (
30).
At each generation, the error is recomputed for the closed-loop system, where the resulting error is corrected by the PID controller and passed as inputs to the motors of the quadcopter.
In short, flight control systems for UAVs are mostly carried out using PID control systems. A PID controller is typically used to stabilize the rotational and translational motion of an UAV quadrotor system and enforce it to follow a specific path with minimum energy and error. It is evident that a fast response speed and high control capacity can be obtained by implementing adequate PID parameters. Thus, the method of tuning the PID parameter has become one of the hotspots of research in the engineering field. The tuning process, by which optimal values for the controller parameters are gained, is a crucial challenge. Many studies have been performed to locate the best way to fine-tune the PID parameters in order to obtain appropriate performance, such as rapid response, zero steady-state error, and minimal undershoot/overshoot. Although there are only three parameters, tuning PID parameters is a difficult process because it must meet complex criteria within the limitations of system actuators. In addition, the conventional PID controller only works for lower-order systems and lacks robustness against large uncertainties in system parameters. This is due to the inadequate number of parameters for handling the independent specifications of the time–domain response, such as the overshooting and settling time. Therefore, an effective PID controller control method is needed to have a better control point. The evolution of a method for tuning quadcopter PID parameters may save effort and time, and preferable control performance can be reached. For this intent, we propose, in this paper, a mathematics-based framework using several meta-heuristic optimization algorithms to design a robust PID controller for an UAV system. The produced control system should improve time-response dynamic properties, guarantee durability against large parameter uncertainties, and provide an effective tuning tool with fewer tuning parameters. After the determination of the parameters of the PID controller, the closed-loop system will achieve the required performance criteria.
4. Bio-Inspired Meta-Heuristic Algorithms
Bio-inspired optimizer algorithms are of great value for addressing many types of complex real-world problems, making it feasible to arrive at reasonable global solutions in a plausible time frame with better accuracy and reliability than classical search methods [
43]. In fact, there is a great need, in practice, for large reliability and adequacy as well as low computational burden when the problem under investigation is so challenging and the search area is quite large. Moreover, in some cases, there is a need to compare the appropriateness of particular and global solutions.
The fundamental motivation for using meta-heuristic algorithms in this controlling and optimization problem is reliable optimization through the use of a local search strategy and the randomness in their evolutionary processes to find optimal or near-optimal solutions. However, this does not always result in meta-heuristics finding compelling or optimal solutions, as was shown in several cases [
33,
44,
45]. In such a context, exploration and exploitation constitute the fundamental and important processes of meta-heuristic algorithms. While the meta-heuristic algorithm endeavors to assay various areas in the search domain during the exploration process, it seeks to converge the search into all sub-optimal solutions found in the exploitation process [
33,
43].
Broadly speaking, nature-inspired algorithms have intelligence behavior based on the collective behavior of a group of social individuals with multiple collaborating agents for the sake of optimizing a given problem. Although these algorithms are made up of relatively modest individuals, they offer harmonious social behavior to guide the individuals to their intended goals. These algorithms outset by randomly creating a predetermined number of possible solutions. The candidate solutions are then updated at each iteration loop, using a particular mechanism on the basis of the meta-heuristic algorithm used. Each algorithm evaluates each solution within each iteration loop, using an objective function. Evolutionary Algorithms (EAs), such as Genetic Algorithms, and Swarm Intelligence (SI), such as Particle Swarm Optimization and the Crow Search Algorithm, are two categories of bio-inspired meta-heuristic algorithms.
5. Proposed Multi-Objective Fitness Function
Fitness function plays a key role in the optimization problems that assists the optimization method in measuring the quality of the solution of the problem under study and how effective the solution of the problem is. The fitness function used by the meta-heuristic algorithms presented in this work, namely GA, CSA and PSO, to optimize the parameters of the PID controller for the inputs of the quadcopter is the integration of the weighted absolute error time and other three parameters identified as the overshoot, rise time and settling time of the quadcopter. Therefore, this fitness function is a multi-objective function as given in Equation (
31):
where
and
represent the weighting parameters that boost the efficacy of PSO;
r,
s and
o are the rise time, settling time and overshoot, respectively; and
K is the integral of the weighted absolute error time defined in Equation (
32) [
46]:
where
n stands for the number of samples,
t represents the sample time and
e stands for the error difference between unity and the response time of the closed-loop system.
In Equation (
31), the values of
and
are arbitrarily defined as 0.7, 0.1, 0.1 and 0.1, respectively. So, the proposed fitness function is intended to reduce all the parameter values,
K,
r,
s and
o, concurrently based on the priority that is set as the weight parameters, namely
and
.
Notably, the fitness function proposed for GA, CSA and PSO to implement the problem under study is a multi-objective function that integrates several parameters, including
K,
o,
r and
s. This combination of these parameters is targeted to increase the gain of the PID controller in the optimization process as well as to contribute to measuring the impact of the closed system performance based on the step response. As a matter of fact,
K in Equation (
32) is utilized in Equation (
31) to arrive at an optimal PID control system design as confirmed in [
30]. This parameter is integrated into the multi-objective fitness function to produce a system with a much faster settling time.
7. Statistical Test Analysis
To locate the importance of the differences between the optimization outcomes arrived at by each method, we utilize the Friedman statistical test. This test is conducted to find out if there are perceivable differences between the overshoot results of the methods presented in this work [
47]. If there are statistically notable differences between the optimization results, the Holm method [
47] will be conducted as a posterior statistical procedure that is usually used to compare the best method of performance (i.e., the control method) with the rest of the methods. The level of confidence, pointed out as
, is 5% in all evaluated cases.
In more detail, Friedman’s test requires the calculation of the average ranked value. Then, a comparison is used to assess the critical values obtained for the level of significance tested (
) with Friedman’s test to check whether or not the null hypothesis is rejected. In such a context, if the level of significance (i.e., the
p-value) divulged by Friedman’s test is less than or equal to
, the null hypothesis is rejected, denoting that there is a big difference between the performance scores of the algorithms. After that, further steps are needed to determine which algorithm’s performance is crucially different from the best algorithm and which algorithms are similar. This is to check whether the outcomes arrived at by the best algorithm differ from the outcomes of the other methods in a statistically significant manner. For this intent, this study looks at a post-hoc statistical analysis method of Holm’s test [
48] to see which methods are worse or better than the best algorithm and at what level of significance. Holm’s test is a widely applicable test method based upon the sequential rejection method. It orders all optimization algorithms on the basis of their
p-values and compares them to
, where
is the significance level,
k represents the freedom degree and
i denotes the algorithm number. The method starts with the most significant
p-value and consecutively rejects the null hypothesis as long as
. Once the method is not able to reject the hypothesis, it stops and stops all the remaining hypotheses passable. In applying Friedman’s test, the best-performing algorithm obtains the lowest ranking, while the worst performing algorithm obtains the highest rank. The lowest ranked method is used as a control algorithm for post-hoc analysis.
The average order of the optimization results arrived at by Friedman’s method as per the overshoot metric is tabulated in
Table 4. The controlling results based the presented methods in this work are ranked as PSO in the first order, followed, in order, by CSA, GA and ZN.
The
p-value, computed using Friedman’s statistical test for the overshoot measure in
Table 2, is
; the null hypothesis of the homologous performance level is unacceptable to assert if there are statistically significant differences between the performance of all evaluated methods.
The Holm’s method is then appealed as a post-test procedure to determine if there are statistically substantial differences between the best performing algorithm (that is, PSO) and the remaining algorithms (ZN, GA and CSA). Holm’s method dismisses the hypotheses with
p-values of less than
. The results obtained based on the Holm’s procedure are presented in
Table 5.
The findings of Holm’s method reveal that the optimization results obtained based on PSO in controlling the movement of the quadcopter are statistically better than the optimization results obtained based on the ZN-, GA- and CSA-based approaches. In the case of the optimization results obtained using the CSA-based approach, there is no significant difference between these results and those obtained using the PSO-based approach, in accordance with the results given in
Table 4 and
Table 5. In summary, these end results imply that controlling the movement of the quadcopter using a CSA-based approach is a feasible alternative approach to the PSO-based approach, which needs further investigation.
8. Discussion of the Results
It is clearly observed from
Table 2 that PSO reports overshoot values for the quadcopter inputs that are significantly lesser than the overshoot values reported by the ZN method, shown in
Table 2, for the same corresponding quadcopter inputs. Further, GA and CSA reported overshoot values as shown in
Table 2, which are lower than those reported by the ZN method for the corresponding inputs. These findings are attributed to the powerful features of GA, CSA and PSO as meta-heuristic optimization methods and the robustness of the presented multi-objective fitness function given in Equation (
31). However, the overshoot values reported by PSO for the inputs of the quadcopter in
Table 2 are lower than those reported by GA and CSA as shown in
Table 2.
The rise and settling times reported by GA, CSA and PSO for all quadcopter inputs are remarkably lower than those reported by the ZN method for the same corresponding inputs. This clarifies and may prove that GA, CSA and PSO are reliable and more effective than the classical ZN method in controlling the movements of the quadcopter, using PID control parameters. Additionally, the differences in the rise and settling times between the control process developed based on PSO, GA and CSA for the four inputs of the quadcopter are respectively less than 0.0045, 0.0209, 0.00925, and 0.431625, on average, which are small and not statistically significant.
Overshoot of the motor signal of the quadcopter is a critical factor that should be slashed. If the temperature of the insulation of the motor of a quadcopter is elevated further away than its rated limits, then the motor will be ruined rapidly [
49].
Table 2 states that the overshoot values of all movements of the quadcopter reported by PSO are close to zero in all cases considered; the overshoot values for all movements of the quadcopter reported by GA and CSA are very small in all cases considered. Outstandingly, this outcome is highly desirable for reaching an extremely low temperature for the motors of the quadcopter to protect them from destruction.
The control approaches developed based on GA, CSA and PSO report very low fitness values for all quadcopter inputs, which simply means that the controlling processes developed using these meta-heuristic algorithms for the PDI controller of the quadcopter reached an optimal control for the movements of the quadcopter. Moreover, there is no significant difference between the cost values of these algorithms, whereas the differences in fitness cost values between the optimization developed based on PSO, GA and CSA for the four inputs of the quadcopter are, respectively, less than 0.0015475 and, 0.0209, 0.00925, and 0.009815, on average, which are not statistically significant.
Simply put, the step signals representations of the quadcopter inputs plotted using GA, CSA and PSO demonstrate that these meta-heuristic algorithms are robust tuning algorithms for the quadcopter’s PID controller and are better than the conventional tuning methods, such as the evaluated ZN method. In short, this expected upshot asserts the reliability level of GA, CSA and PSO in optimizing the PID parameters for the quadcopter.
All in all, the following observations can be made from the experimental results of GA, CSA and PSO when used to optimize the PID parameters to control the movements of the quadcopter.
For all evaluation criteria, the meta-heuristic algorithms presented in this paper, including GA, CSA and PSO, are able to control the PID controller of the quadcopter to control its movement in all orientations. The superior performance of these algorithms in such an optimization and control problem is attributed to the astonishing features of meta-heuristics and the fitness function, which suggested carrying out such work. The meta-heuristic optimization algorithms is presented in
Appendix A.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}