
Processor-in-the-Loop Architecture Design and Experimental Validation for an Autonomous Racing Vehicle





Abstract
:1. Introduction
2. Method
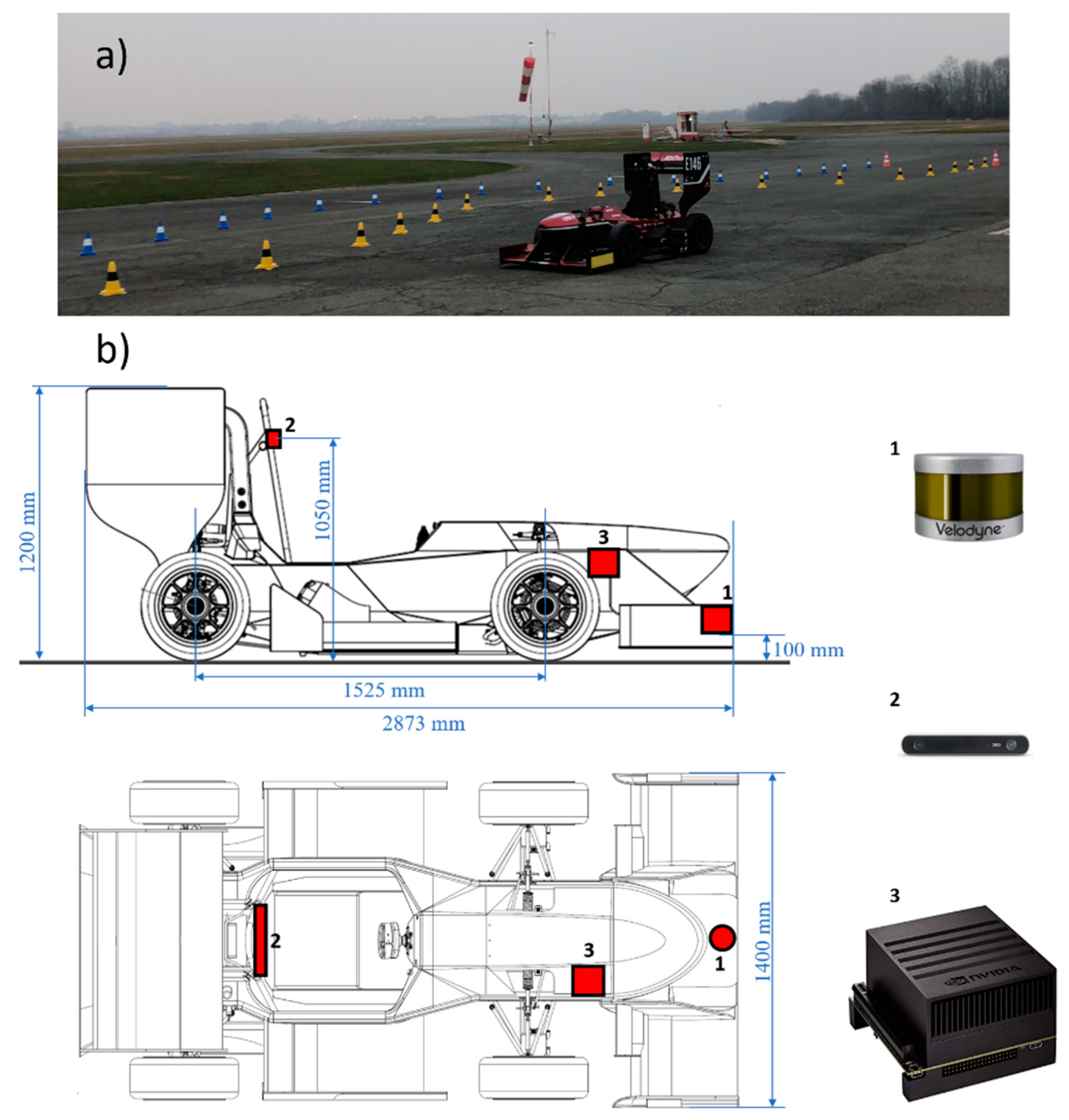
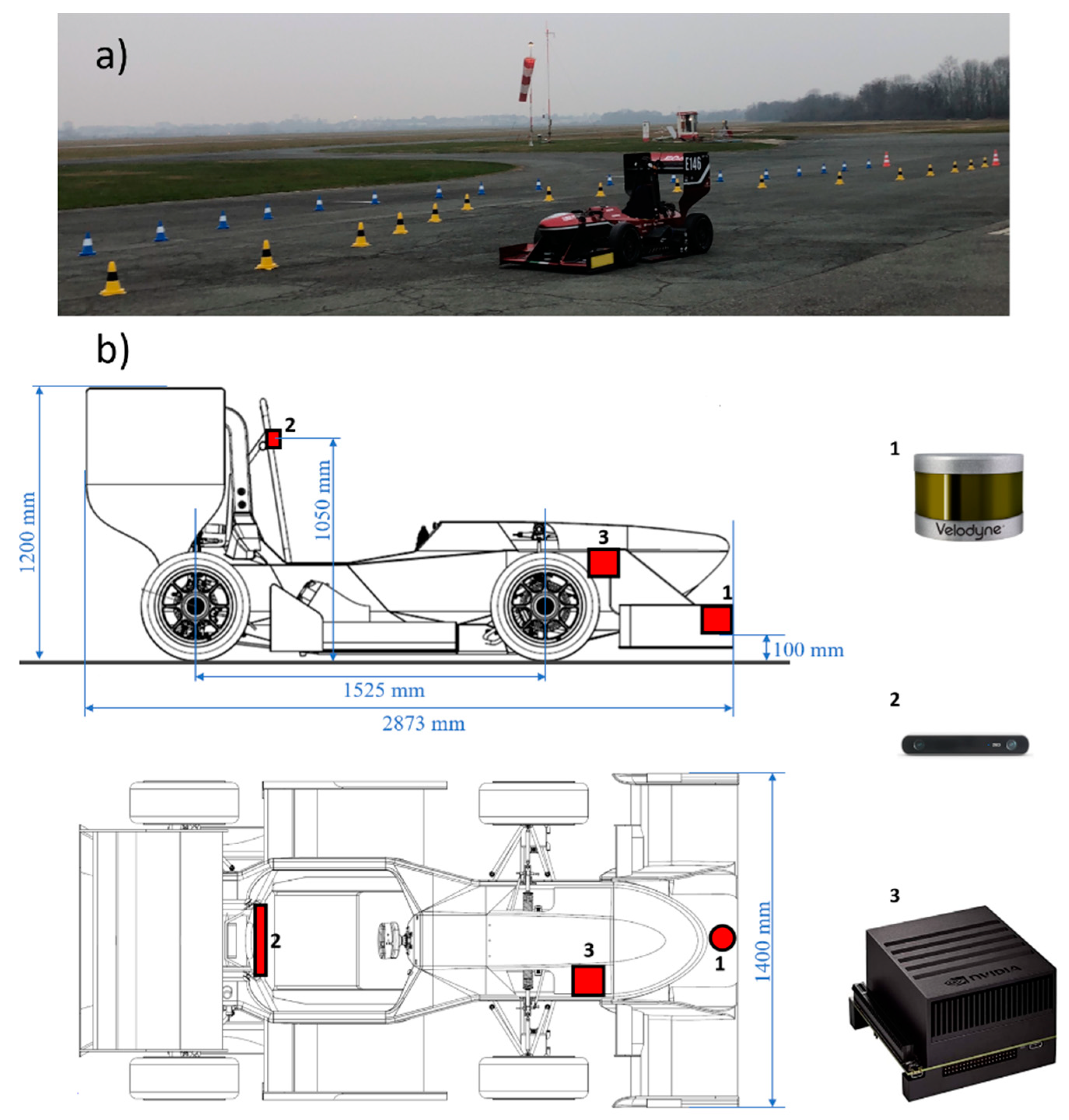
2.1. Autonomous Vehicle Pipeline and Vehicle Setup
2.1.1. Environment Perception
2.1.2. Path Planning
2.1.3. Vehicle Modeling
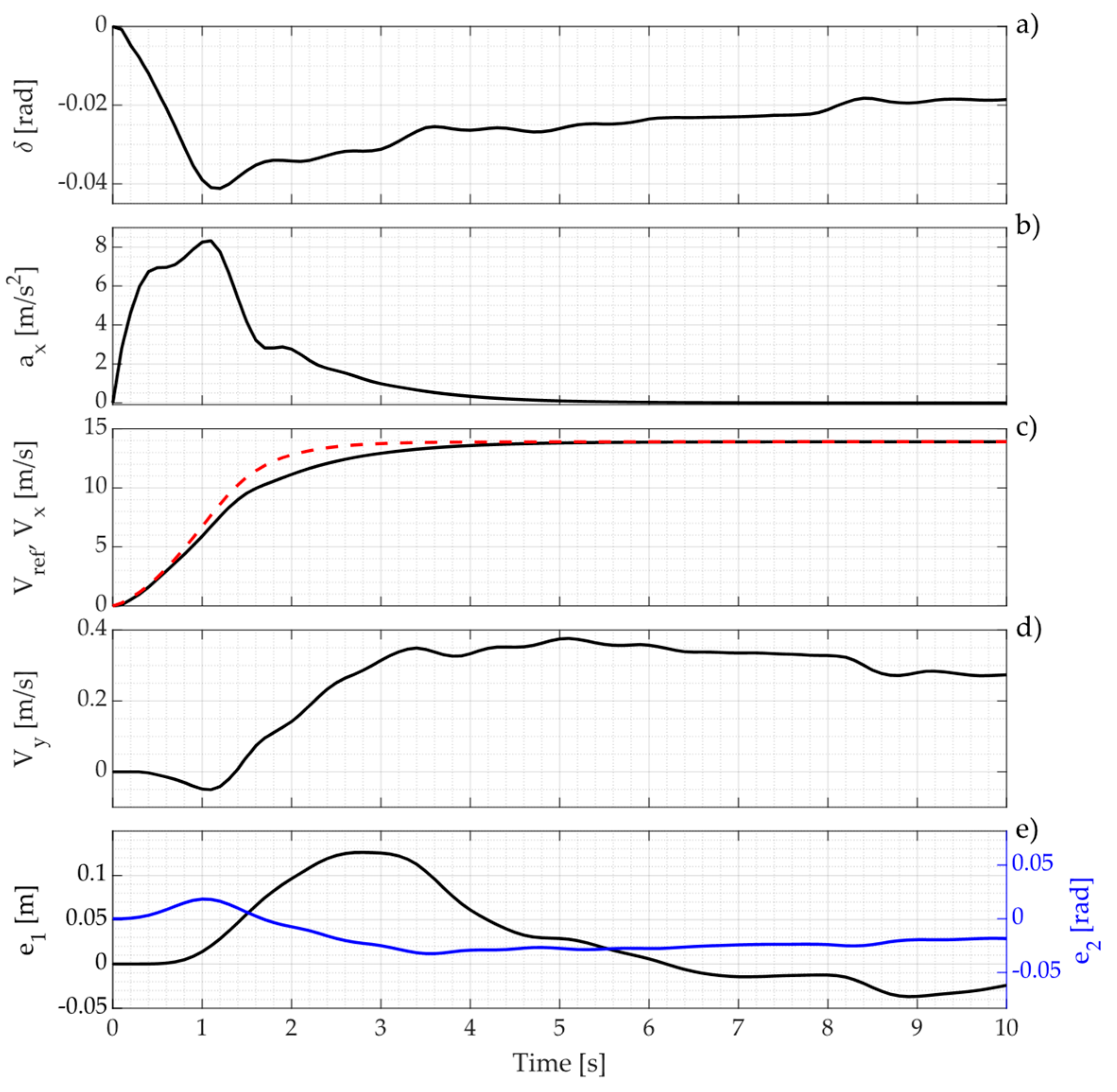
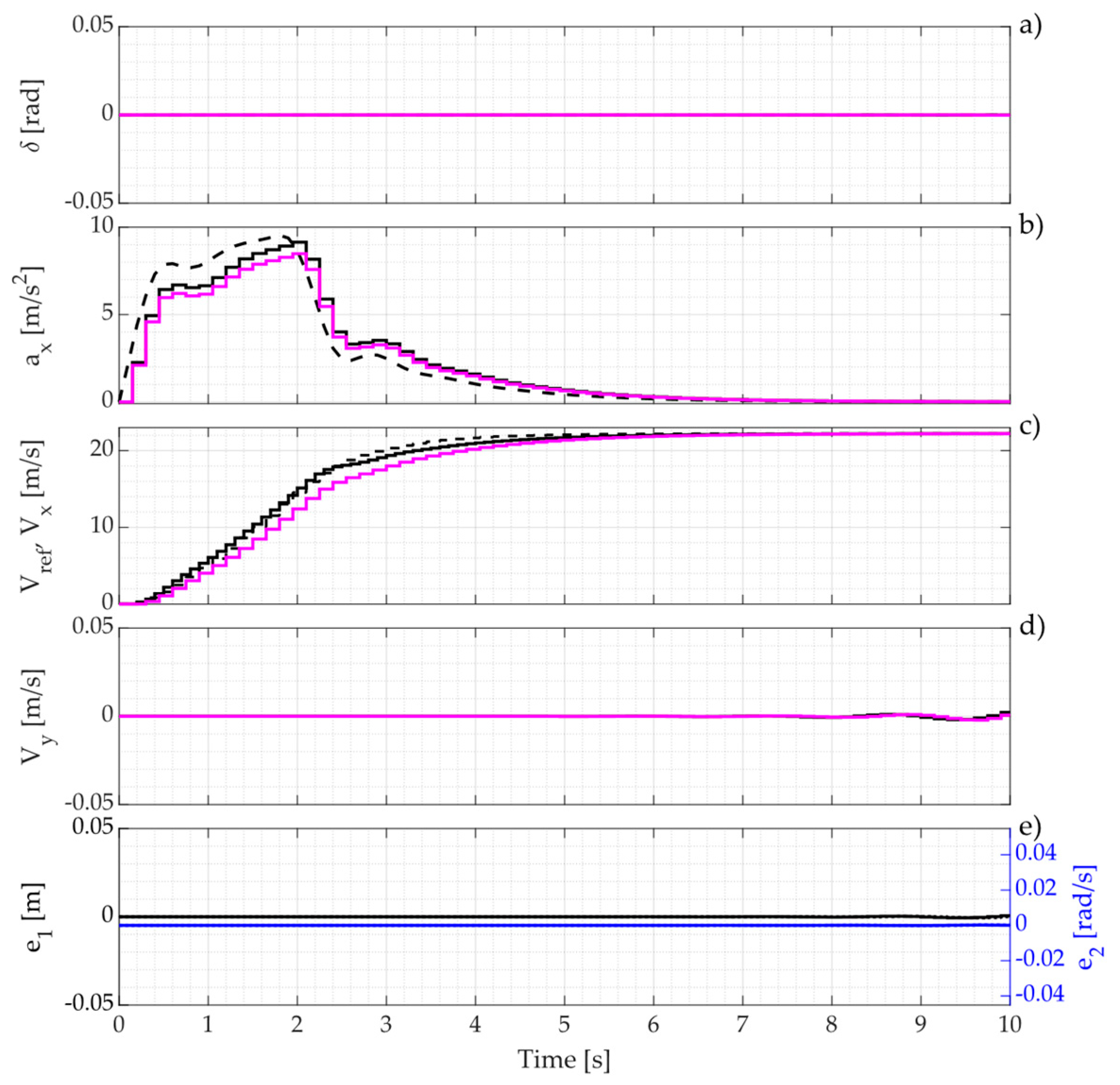
2.1.4. Control
2.2. Hardware Implementation and PIL Architecture
3. Results
3.1. Driving Scenarios and Environment Perception
3.2. Processor-in-the-Loop and Simulations Comparison
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chan, C.Y. Advancements, prospects, and impacts of automated driving systems. Int. J. Transp. Sci. Technol. 2017, 6, 208–216. [Google Scholar] [CrossRef]
- Silberg, G.; Manassa, M.; Everhart, K.; Subramanian, D.; Corley, M.; Fraser, H.; Sinha, V. Self-driving cars: Are we ready? Kpmg Llp 2013, 1–36. [Google Scholar]
- Litman, T. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, CB, Canada, 2017; p. 28. [Google Scholar]
- Ryan, M. The future of transportation: Ethical, legal, social and economic impacts of self-driving vehicles in the year 2025. Sci. Eng. Ethics 2020, 26, 1185–1208. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Raposo, M.A.; Grosso, M.; Mourtzouchou, A.; Krause, J.; Duboz, A.; Ciuffo, B. Economic implications of a connected and automated mobility in Europe. Res. Transp. Econ. 2021, 101072. [Google Scholar] [CrossRef]
- Bagloee, S.A.; Tavana, M.; Asadi, M.; Oliver, T. Autonomous vehicles: Challenges, opportunities, and future implications for transportation policies. J. Mod. Transp. 2016, 24, 284–303. [Google Scholar] [CrossRef] [Green Version]
- Rieber, J.M.; Wehlan, H.; Allgower, F. The ROBORACE contest. IEEE Control Syst. Mag. 2004, 24, 57–60. [Google Scholar]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Fong, P.; Gale, J.; Halpenny, M.; Hoffmann, G.; et al. Stanley: The robot that won the DARPA Grand Challenge. J. Field Robot. 2006, 23, 661–692. [Google Scholar] [CrossRef]
- Buehler, M.; Iagnemma, K.; Singh, S. (Eds.) The DARPA Urban Challenge: Autonomous Vehicles in City Traffic; Springer: Berlin/Heidelberg, Germany, 2009; Volume 56. [Google Scholar]
- Pendleton, S.D.; Andersen, H.; Du, X.; Shen, X.; Meghjani, M.; Eng, Y.H.; Rus, D.; Ang, M.H. Perception, planning, control, and coordination for autonomous vehicles. Machines 2017, 5, 6. [Google Scholar] [CrossRef]
- Kocić, J.; Jovičić, N.; Drndarević, V. Sensors and sensor fusion in autonomous vehicles. In Proceedings of the 26th Telecommunications Forum (TELFOR), Belgrade, Serbia, 20–21 November 2018; pp. 420–425. [Google Scholar]
- Feraco, S.; Bonfitto, A.; Amati, N.; Tonoli, A. A LIDAR-Based Clustering Technique for Obstacles and Lane Boundaries Detection in Assisted and Autonomous Driving. In Proceedings of the ASME 2020 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, St. Louis, MO, USA, 16–19 August 2020. [Google Scholar]
- Katrakazas, C.; Quddus, M.; Chen, W.H.; Deka, L. Real-time motion planning methods for autonomous on-road driving: State-of-the-art and future research directions. Transp. Res. Part C Emerg. Technol. 2015, 60, 416–442. [Google Scholar] [CrossRef]
- Schwarting, W.; Alonso-Mora, J.; Rus, D. Planning and decision-making for autonomous vehicles. Annu. Rev. Control Robot. Auton. Syst. 2018, 1, 187–210. [Google Scholar] [CrossRef]
- Feraco, S.; Bonfitto, A.; Khan, I.; Amati, N.; Tonoli, A. Optimal Trajectory Generation Using an Improved Probabilistic Road Map Algorithm for Autonomous Driving. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Online Conference, 17–19 August 2020; Volume 83938, p. V004T04A006. [Google Scholar]
- Feraco, S.; Luciani, S.; Bonfitto, A.; Amati, N.; Tonoli, A. A local trajectory planning and control method for autonomous vehicles based on the RRT algorithm. In Proceedings of the 2020 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Online Conference, 18–20 November 2020; pp. 1–6. [Google Scholar]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A survey of autonomous driving: Common practices and emerging technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Khan, I.; Feraco, S.; Bonfitto, A.; Amati, N. A Model Predictive Control Strategy for Lateral and Longitudinal Dynamics in Autonomous Driving. In Proceedings of the ASME 2020 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, St. Louis, MO, USA, 16–19 August 2020. [Google Scholar]
- Feraco, S.; Bonfitto, A.; Amati, N.; Tonoli, A. Combined lane keeping and longitudinal speed control for autonomous driving. In Proceedings of the ASME 2019 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Anaheim, CA, USA, 18–21 August 2019. [Google Scholar]
- Mina, J.; Flores, Z.; López, E.; Pérez, A.; Calleja, J.H. Processor-in-the-loop and hardware-in-the-loop simulation of electric systems based in FPGA. In Proceedings of the 13th International Conference on Power Electronics (CIEP), Mexico Guanajuato, Mexico, 20–23 June 2016; pp. 172–177. [Google Scholar]
- Hu, M.; Zeng, G.; Yao, H.; Tang, Y. Processor-in-the-loop demonstration of coordination control algorithms for distributed spacecraft. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 1008–1011. [Google Scholar]
- Francis, G.; Burgos, R.; Rodriguez, P.; Wang, F.; Boroyevich, D.; Liu, R.; Monti, A. Virtual prototyping of universal control architecture systems by means of processor in the loop technology. In Proceedings of the APEC 07-Twenty-Second Annual IEEE Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 25 February–1 March 2007; pp. 21–27. [Google Scholar]
- Mammarella, M.; Capello, E.; Park, H.; Guglieri, G.; Romano, M. Tube-based robust model predictive control for spacecraft proximity operations in the presence of persistent disturbance. Aerosp. Sci. Technol. 2018, 77, 585–594. [Google Scholar] [CrossRef]
- Vardhan, H.; Akin, B.; Jin, H. A low-cost, high-fidelity processor-in-the loop platform: For rapid prototyping of power electronics circuits and motor drives. IEEE Power Electron. Mag. 2016, 3, 18–28. [Google Scholar] [CrossRef]
- Taheri, E.; Ferdowsi, M.H.; Danesh, M. Fuzzy greedy RRT path planning algorithm in a complex configuration space. Int. J. Control Autom. Syst. 2018, 16, 3026–3035. [Google Scholar] [CrossRef]
- Deng, W.; Lee, Y.H.; Zhao, A. Hardware-in-the-loop simulation for autonomous driving. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 1742–1747. [Google Scholar]
- Brogle, C.; Zhang, C.; Lim, K.L.; Bräunl, T. Hardware-in-the-loop autonomous driving simulation without real-time constraints. IEEE Trans. Intell. Veh. 2019, 4, 375–384. [Google Scholar] [CrossRef]
- Betz, J.; Wischnewski, A.; Heilmeier, A.; Nobis, F.; Hermansdorfer, L.; Stahl, T.; Herrmann, T.; Lienkamp, M. A software architecture for the dynamic path planning of an autonomous racecar at the limits of handling. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019; pp. 1–8. [Google Scholar]
- Betz, J.; Wischnewski, A.; Heilmeier, A.; Nobis, F.; Stahl, T.; Hermansdorfer, L.; Lienkamp, M. A software architecture for an autonomous racecar. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–6. [Google Scholar]
- Sun, Y.; Goila, A.; Demir, D.; Tapli, T. Urban Pilot Motion Planning and Control Deployment Via Real-Time Multi-Core Multi-Thread Prototyping (No. 2020-01-0125). In SAE Technical Paper; 2020. Available online: https://www.sae.org/publications/technical-papers/content/2020-01-0125/ (accessed on 14 July 2021).
- Srinivas, N.; Panditi, N.; Schmidt, S.; Garrelfs, R. MIL/SIL/PIL Approach A new paradigm in Model Based Development. J. Syst. Softw. 2014. Available online: https://www.mathworks.com/content/dam/mathworks/mathworks-dot-com/solutions/automotive/files/in-expo-2014/mil-sil-pil-a-new-paradigm-in-model-based-development.pdf (accessed on 14 July 2021).
- Glennie, C.L.; Kusari, A.; Facchin, A. Calibration and Stability Analysis of the VLP-16 Laser Scanner. ISPRS Annals of Photogrammetry. Remote Sens. Spat. Inf. Sci. 2016, 9. Available online: https://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XL-3-W4/55/2016/isprs-archives-XL-3-W4-55-2016.pdf (accessed on 14 July 2021).
- Ortiz, L.E.; Cabrera, E.V.; Gonçalves, L.M. Depth data error modeling of the ZED 3D vision sensor from stereolabs. ELCVIA Electron. Lett. Comput. Vis. Image Anal. 2018, 17, 0001-15. [Google Scholar] [CrossRef]
- Ditty, M.; Karandikar, A.; Reed, D. Nvidia’s xavier SoC. In Proceedings of the Hot Chips: A Symposium on High Performance Chips, Cupertino, CA, USA, 19–21 August 2018. [Google Scholar]
- Formula Student Germany. FSG Competition Handbook 2019; 2019. Available online: https://www.formulastudent.de/fileadmin/user_upload/all/2019/rules/FSG19_Competition_Handbook_v1.0.pdf (accessed on 14 July 2021).
- Živojević, D.; Velagić, J. Path planning for mobile robot using Dubins-curve based RRT algorithm with differential constraints. In Proceedings of the 2019 International Symposium ELMAR, Zadar, Croatia, 23–25 September 2019; pp. 139–142. [Google Scholar]
- LaValle, S.M. Rapidly-Exploring Random Trees: A New Tool for Path Planning; 1998. Available online: http://lavalle.pl/papers/Lav98c.pdf (accessed on 14 July 2021).
- Delaunay, B. Sur la sphere vide, Otdelenie Matematicheskii i Estestvennyka Nauk 7. Izv. Akad. Nauk SSSR 1934, 1–2, 793–800. [Google Scholar]
- Dubins, L.E. On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents. Am. J. Math. 1957, 79, 497–516. [Google Scholar] [CrossRef]
- Manca, R.; Circosta, S.; Khan, I.; Feraco, S.; Luciani, S.; Amati, N.; Bonfitto, A.; Galluzzi, R. Performance Assessment of an Electric Power Steering System for Driverless Formula Student Vehicles. In Actuators; Multidisciplinary Digital Publishing Institute: 2021; Volume 10, p. 165. Available online: https://www.mdpi.com/2076-0825/10/7/165 (accessed on 14 July 2021).
- Li, L.; Wang, F.; Zhou, Q. Integrated longitudinal and lateral tire/road friction modeling and monitoring for vehicle motion control. IEEE Trans. Intell. Transp. Syst. 2016, 7, 1–19. [Google Scholar] [CrossRef]
- Luciani, S.; Bonfitto, A.; Amati, N.; Tonoli, A. Model predictive control for comfort optimization in assisted and driverless vehicles. Adv. Mech. Eng. 2020, 12, 1687814020974532. [Google Scholar] [CrossRef]
- Hill, D.; de Beeck, J.O.; Baja, M.; Djemili, I.; Reuther, P.; Sutra, I. Use of V-Cycle Methodology to Develop Mechatronic Fuel System Functions No. 2017-01-1614. In SAE Technical Paper; 2017. Available online: https://www.sae.org/publications/technical-papers/content/2017-01-1614/ (accessed on 14 July 2021).
- Yaghmour, K. Building Embedded Linux Systems; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2009. [Google Scholar]
- Carvalho, A.; Machado, C.; Moraes, F. Raspberry Pi Performance Analysis in Real-Time Applications with the RT-Preempt Patch. In Proceedings of the 2019 Latin American Robotics Symposium (LARS), 2019 Brazilian Symposium on Robotics (SBR) and 2019 Workshop on Robotics in Education (WRE), Rio Grande, RS, Brazil, 22–26 October 2019; pp. 162–167. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Mass | 190 | [kg] | |
| Moment of Inertia about z-axis | 95.81 | [kgm2] | |
| Vehicle wheelbase | 1.525 | [m] | |
| Overall length | 2.873 | [m] | |
| Front axle distance to CoG | 0.839 | [m] | |
| Rear axle distance to CoG | 0.686 | [m] | |
| Vehicle track width | 1.4 | [m] | |
| Overall width | 1.38 | [m] | |
| Height of CoG | 0.242 | [m] | |
| Wheel radius | 0.241 | [m] | |
| Longitudinal drag area | 2 | [m2] | |
| Longitudinal drag coefficient | 0.3 | - | |
| Longitudinal lift coefficient | 0.1 | - | |
| Longitudinal drag pitch moment | 0.1 | - | |
| Maximum power (total vehicle) | 80 | [kW] | |
| Motors peak torque | 84 | [Nm] | |
| Steering transmission ratio | 4.23 | [-] | |
| Maximum energy stored | 6.29 | [kWh] |
| Raspberry Pi 4B | Speedgoat Baseline | |
|---|---|---|
| CPU | Broadcom BCM2711 quad-core Cortex-A72 64-bit SoC @ 1.5 GHz | Intel Celeron 2 GHz 4 cores |
| Memory | 4 GB LPDDR4 | 4 GB DDR3 |
| EEE 802.11b/g/n/ac wireless | 1 × USB 3.0 and 2 × USB 2.0 | |
| Network | Bluetooth 5.0 | Gigabit Ethernet 2 (Intel I210) |
| Gigabit Ethernet | ||
| I/O | USB, 40-pin GPIO header | 4 × mPCIe |
| OS | Debian, Raspberry Pi OS | Simulink Real-Time™ |
| Power | 5 V DC via USB-C connector | 8–36 VDC Input Range |
| Raspberry | Speedgoat | ||||||
|---|---|---|---|---|---|---|---|
| Straight | Left Turn | Right Turn | Straight | Left Turn | Right Turn | ||
| RMSE | |||||||
| MAE | |||||||
| RMSE | 1.70 × 10−5 | 1.67 × 10−5 | 0.003 | ||||
| MAE | 7.26 × 10−6 | 6.89 × 10−6 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tramacere, E.; Luciani, S.; Feraco, S.; Bonfitto, A.; Amati, N. Processor-in-the-Loop Architecture Design and Experimental Validation for an Autonomous Racing Vehicle. Appl. Sci. 2021, 11, 7225. https://doi.org/10.3390/app11167225
Tramacere E, Luciani S, Feraco S, Bonfitto A, Amati N. Processor-in-the-Loop Architecture Design and Experimental Validation for an Autonomous Racing Vehicle. Applied Sciences. 2021; 11(16):7225. https://doi.org/10.3390/app11167225
Chicago/Turabian StyleTramacere, Eugenio, Sara Luciani, Stefano Feraco, Angelo Bonfitto, and Nicola Amati. 2021. "Processor-in-the-Loop Architecture Design and Experimental Validation for an Autonomous Racing Vehicle" Applied Sciences 11, no. 16: 7225. https://doi.org/10.3390/app11167225
APA StyleTramacere, E., Luciani, S., Feraco, S., Bonfitto, A., & Amati, N. (2021). Processor-in-the-Loop Architecture Design and Experimental Validation for an Autonomous Racing Vehicle. Applied Sciences, 11(16), 7225. https://doi.org/10.3390/app11167225