1. Introduction
The index of the refraction structure constant,
, is commonly used to quantify optical turbulence strength, which, in turn, can degrade both active and passive system performance, whether that of a laser central to a free space optical communication uplink, an inter-continental relay mirror high energy laser power-beaming architecture to transport energy to remote sites, or an upward-looking telescope pointed at a distant space object. Though valuable and ever more capable, a path-averaged and even a path-resolved measurement of
is available via optical means such as scintillometry [
1] and time-lapse imagery [
2,
3], respectively. Even so, continuous, high frequency, very localized, point measurement of causative temperature, moisture, and wind gradients near the source or image plane of one’s active/passive system can be difficult using optical means because one is observing a net optical effect. Such localized point measurements, however, are especially beneficial to engineers and scientists who develop and apply compensation and correction techniques and associated modalities, as well as those individuals endeavoring to develop, verify, and validate optical turbulence and effects models through carefully instrumented field tests and post-test forensics analysis. Similarly, these high-fidelity flux measurements are of interest to mission planners and system operators seeking to update/nudge an otherwise long range, days-to-weeks advance forecast of system performance to support up-to-the-minute mission briefs [
4] and current-mission system settings. The latter advance forecasts are built on a combination of increasingly sophisticated laser propagation and numerical weather prediction models.
By emphasizing the high frequency measurement of the time of flight of an acoustic pulse transmitted between two probes, 3D sonic anemometers were originally conceived, and subsequently extensively applied, to assess temperature gradients and, thus, the temperature structure constant. However, limiting one’s analysis to temperature gradients can lead to a sub-optimal assessment of optical turbulence strength during, for example, diurnal quiescent periods. During these periods, temperature gradients in all directions diminish to near zero—the evening quiescent period ends because the ground (due to radiative losses to space) cools the air near it and creates a vertical temperature gradient, and as the night goes along, horizontal gradients are established because of different cooling rates of different surfaces. The morning quiescent period breaks down because of the opposite effect of the sun heating the ground. At night (in stable conditions), waves along the stable layers—caused by wind and large object movement—create a spatial and temporal index of refraction fluctuations that create “optical turbulence” effects on laser/optical propagation. During the day, the sun heating the ground creates convection that supports more statistically characterize-able advecting turbulent eddies (e.g., Kolmogorov turbulence) that produce a spatial and temporal index of refraction fluctuations that, in turn, effect electromagnetic—especially optical and near infrared—wave propagation in the classical “optical turbulence” way. While temperature gradients are, in general, the largest contributor to the index of refraction gradients, humidity gradients and pressure perturbations also contribute. Calculating from in some cases, makes quiescent periods seem far more marked than they often are as measured by an optical instrument such as a scintillometer. Arrays of sonic anemometers measure the speed of sound in air in many directions, thus, they can conceivably capture gradients in the temperature, humidity (since this affects air density and the speed of sound), and the velocity. The velocity fluctuations are created by the small turbulent eddies or waves on the stratified layers that have small circulations (e.g., vortices) associated with them, which, in turn, produce pressure/density gradients that establish an index of refraction gradients with very little temperature change. These humidity and pressure/density variations often continue to exist during quiescent periods and in adiabatic layers, keeping actual levels significantly higher than those characterized through a consideration of only. This suggests the rationale for employing arrays of sonic anemometers as control research and test instrumentation to capture more fully the physics that create optical turbulence effects.
This study demonstrates the implementation of 3D sonic anemometers arrayed in a way to do what each sonic anemometer was originally designed to do best: acoustically interrogate eddies and sense temperature, moisture, and wind velocity (and hence pressure) gradients, which, in combination, lead to index of refraction gradients. Nosov et al. [
5] have similarly demonstrated a calibrated method to obtain
,
, and
from a small array of ultrasonic anemometers. This paper extends the relationships shown in [
5] with evidence demonstrating optical turbulence strength,
, can be derived from a parameter,
, which is more directly tied to the turbulent eddy distribution independent of non-adiabatic temperature gradients that many techniques tend to exploit to their advantage, but that can disappear when turbulence does not. Shikhovtsev et al. [
6] have noted the potential importance of quantifying the non-temperature gradient component that partially drives turbulent eddy production with their seasonal study of
strength near Lake Baykal that peaked in winter when winds are strongest. While underlining the benefits of employing local sonic anemometer arrays, this paper also seeks to set forth a solid set of relationships of equal relevance when one is using acoustic sounding—whether sonic anemometry or other familiar techniques such as Sound Detection and Ranging (SODAR)—to evaluate and characterize optical turbulence. A validation of these relationships will primarily be accomplished through a comparative evaluation of the results obtained through path-resolved optical means. Materials and Methods for the present work are described in
Section 2. This section derives, or when of common usage simply references, the key physical expressions enabling an investigation of optical turbulence strengths and effects using acoustically observed micro-meteorological parameters.
Section 2 also provides a description of the sonic anemometer arrays, supporting instrumentation, and the general field experiment set-up. It is in this section that the equivalency of the sonic and virtual temperature is demonstrated (they have previously been assumed different but approximately equal), and a new method to remove the non-turbulent layer vertical temperature change that is independent of atmospheric stability is introduced. Furthermore, a summary description of a path-resolved optical turbulence profiler used for comparative reference is included here as well. Representative optical turbulence point measurements, as collected from sonic anemometers installed on a static tower, will be profiled, analyzed, and comparatively evaluated with the reference path-resolved optical turbulence measurements in
Section 3.
Section 4 will conclude by summarizing the analysis and discussion of the preceding section, the implications of the findings, and future research directions.
3. Results and Discussion
The top set of plots in
Figure 4 shows calculated
profiles for 14 July 2020 that originated from
measurements recorded using the ATI sonic anemometers mounted at 6.4, 10.2, and 24.5 m above the surface. The profiles are a direct result of calculation of the structure function
according to Equation (2) and then through application of Equation (3). These profiles show typical quiescent periods at approximately an hour after sunrise (1130UTC) and an hour prior to sunset (2330UTC). Generally, the highest anemometer recorded the lower
values, while the lowest anemometer recorded the highest values. Of note are the periods where this general characteristic is reversed (e.g., ~0500 to ~0730UTC); these are periods of marked atmospheric stability.
The bottom set of plots shown in
Figure 4 illustrate the importance of removing the large-scale index of refraction and only using the portion of the refractive gradient that is driven by turbulence (i.e., the small-scale fluctuations in the index of refraction gradient
n’, per Equation (19)). The 24.5-meter
from the
plot in the bottom portion of
Figure 4 is the same as the 24.5-meter plot shown in the top portion of the figure, except that a 90-second ensemble averaging time is used instead of 180 s; this
from the
profile was used as a reference to verify the suitability of the
from the
calculation. Subsequently profiled in the bottom portion of
Figure 4 are
from
using alternate forms of the temperature gradient when deriving the vertical gradient of the index of refraction. The
from
using
Tv for the vertical temperature gradient (
∂Tv/∂z) plot deviates significantly from the
from
baseline plot during quiescent periods, stable periods, and the late afternoon—virtually throughout the entire period. This is expected, since
∂Tv/∂z contains the temperature decrease with height caused by air expanding adiabatically—this is the primary component of the large-scale index of refraction that is always present in the atmosphere to some degree and is not due to turbulence and the index of refraction structure function. A common practice to remove this adiabatic expansion cooling effect is to convert the temperature or virtual temperature to potential temperature or potential virtual temperature as conducted in the
Appendix A to arrive at Equation (5). This was conducted for the
from
using the potential virtual temperature,
θv, for the vertical temperature gradient (
∂θv/∂z)—and hence the index of refraction gradient—plot in the lower part of
Figure 4. While this brought the
from
using the
∂θv/∂z plot much more in line with the
from the
baseline plot, there remained a significant deviation during the stable period from ~0500UTC to ~0730UTC when
θv increased with height. Using
∂θv/∂z for the lapse with height should have corrected the
from the
plot to the baseline at all times. However, it did not because an accurate conversion from
Tv to
θv requires the instantaneous pressure value associated with each sonic
Tv measurement at each level utilized in the
∂θv/∂z calculation. Since the sonic anemometers did not provide instantaneous pressure measurements with each
Tv value, the pressure was calculated at the level of each sonic anemometer from the pressure at the level of the DELTA target board weather station assuming hydrostatic balance. This produced a dry adiabatic lapse of temperature and introduced large-scale index of refraction
∂θv/∂z errors at times when the atmosphere was markedly stable (not adiabatic). Thus, this research presents the methodology encapsulated in Equations (17)–(19) whereby the large-scale
Tv vertical gradient, and, in turn, the large-scale index of refraction gradient, is removed without the need for instantaneous pressure at each sonic
Tv measurement. The impact is quite apparent. As can be seen in the bottom part of
Figure 4, the
from
with the large scale
Tv vertical gradient removed plot follows the
from the
baseline plot throughout the entire day.
Figure 5 shows the calculated
profiles for 14 July 2020 at 24.5 m above the surface predicated on a calculation of the velocity structure constant,
, at that height as well as the ensemble average of the small scale fluctuations of the index of refraction gradient,
, and the ensemble average of the gradient of the wind velocity in the vertical direction
. As described in
Section 2, the latter gradients are determined via measurements recorded with a primary and secondary sonic anemometer, in this case the primary was at 24.5 m above the ground and the secondary at 10.2 m above the ground. The calculations were implemented after converting the primary and secondary sonic anemometer velocity measurements to the mean wind streamlined coordinate system through triple rotation about the sonic anemometer’s u, v, and w coordinate system summarily referenced in
Section 2.5 above.
Figure 5 also includes the
profile as derived from
. The correlation is quite good.
In turn,
Figure 6 and
Figure 7 show the effect of the streamwise rotation of the wind vector, wherein the sonic anemometer data is treated in a streamlined coordinate system.
The impact of streamwise rotation is especially significant for the measurements nearer the surface (i.e., at 10.2 m), which is to be expected given the increased proximity to topographical inhomogeneities at the lower height.
The profiles of
at both 24.5 and 10.2 m for July 14 are overlaid in
Figure 8. As is the case in
Figure 6 and
Figure 7 above, each profile at the height of interest is obtained by combining the wind velocity and calculated small scale fluctuations of the index of refraction gradients with the velocity structure constant,
Cv, using the primary sonic anemometer’s (whether at 24.5 or 10.2 m) point measurements. There is no discernible difference in the magnitude of the
at each level in
Figure 8, as is evident in the top image of
Figure 4; this is likely due to the turbulent refractive index gradient in the 10.2 to 24.5 m layer being the primary calculation component for the
at both levels.
In
Figure 9, the DELTA
profile overlays those of the sonic anemometers quite well through the day, even at the sunset/sunrise quiescent periods, though there is a notable separation at approximately 1700UTC to 2400UTC. The DELTA’s lower afternoon
values brought its mean
value for the day to less than half the mean value found using both sonic anemometer methods. Examining the DELTA camera images shown in
Figure 10 below seems to suggest this separation occurred as the target board’s feature points became more difficult to discern and track, specifically from approximately 1700UTC through 2100UTC, when the target board became more backlit as the sun transited to the western portion of the sky. Additionally, the 14/0006UTC image in
Figure 10 shows that the target board illumination that was used during the field test appears to overwhelm the near sunset lighting conditions causing such a high contrast that only large feature separation distances are discernible. This could have had the effect of limiting the number of weighting functions such that the DELTA would provide more of an integrated path
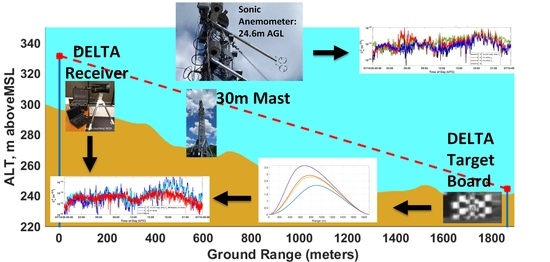
value weighted slightly toward the camera end of the path—which was 30 m high on a 60-meter tower. This increases the likelihood that the DELTA and 30-meter mast sonic anemometer instruments were sampling significantly different volumes of air. The 14/1200UTC image in
Figure 10 shows the target board clearly displayed many different feature separations such that the full number of weighting functions—including one peaking near the 600-meter distance from the DELTA receiver to the 30-meter mast—should have been available for a true profiling capability. Additionally, it is evident in
Figure 10 that the target board position shifted significantly in the images throughout the day, this had little consequence on the system’s ability to quantify and profile turbulence along the path since multiple feature separation distances were always visible within the camera’s processing “mask” field of view. Thus, the DELTA
profile measurement method is not susceptible to large-scale effects on the
quantification since DELTA only uses the measured differential tilt variances for the various feature separations rather than feature positions within the field of view.
Figure 11 shows
profiles for 15 July 2020 at 24.5 m above the surface using
or alternatively via direct calculation of the structure function
as was carried out for the 14 July 2020 profile.
The
plots using
and those obtained using
at 24.5 m match quite well, but do not show pronounced quiescent dips near sunset (15/0000UTC to 15/0130UTC) and sunrise (15/1130UTC) to 15/1230UTC). The DELTA plot, however, does, as it did for 14 July, show significant minima of
just prior to sunset on 15 July (UTC, 14 July local time) and just after sunrise on 15 July. The DELTA’s lower quiescent period
values again brought its mean
value for the day to less than half the mean value found using both sonic anemometer methods.
Figure 12 below shows DELTA camera images at two points in time, from which differential tilt variances are derived to arrive at the
profile shown in
Figure 11 (DELTA images and data were not available after 12UTC on 15 July). The image at 15/0006UTC in
Figure 12 looks nearly identical to the one at 14/0006UTC in
Figure 10. This suggests that the limited feature separation distances resulted in the lower DELTA
value being influenced more by the more quiescent air near the receiver camera that was ~30 m higher than the air volume the sonic anemometers were sampling at 10–25 m above the ground at the 30-meter mast (see
Figure 3). However, the 15/1122UTC image in
Figure 12 also looks identical to its counterpart in
Figure 10—this indicates that even with the multiple feature separation distances available, the DELTA weighting functions cannot be expected to provide exactly comparable data to that measured at a point along the path where the weighting function may peak. Additionally, the turbulence induced random motion of the high contrast features on the target board against relatively darker background areas in the morning results in some spurious banding effects in the images. This probably caused issues with tracking and error in estimating
.
4. Conclusions
In this paper, we revisit in detail an alternative approach to extracting
, which capitalizes on another structure constant rarely harvested from sonic anemometers, the velocity structure constant,
. As noted earlier, the 3D sonic anemometer provides a unique opportunity to simultaneously sample all of the interrelated physical parameters, which bear on the index of refraction fluctuations. To underscore this advantage, a stepwise summary of key physical relationships leading to an expression tying
to
, is presented. Beyond the traditional processing of wind velocity data to calculate
, the expression provides the occasion to draw on a key parameter of sonic anemometry, the sonic temperature and its equivalency to virtual temperature, to infer inherent air density and moisture fluctuations and, consequently, index of refraction gradients. The paper includes details on the field experiments and data analysis used to corroborate the feasibility and suitability of extracting representative
in this alternative manner using
. While the study did illustrate the ease and accuracy of obtaining
via
from a single anemometer, it is anticipated that the set of
from
equations (Equations (4), (5), and (19)) that do not require instantaneous sonic pressure measurements, could serve to amplify the strengths of volumetric instrumentation that measure wind velocities with more spatial/temporal fidelity than temperature, such as SODAR and Doppler LiDAR/LaDAR (Light Detection and Ranging, Laser Detection, and Ranging). Furthermore, the
Appendix A herein provides a unique derivation of how the velocity structure function,
, relates to the refractive index structure function,
, (Equation (5)) and eliminates the need to ignore the water vapor contribution to the index of refraction by combining temperature and moisture into one parameter, the virtual temperature.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











