
Compliance of Distribution System Reactive Flows with Transmission System Requirements

 ,
,  , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
1.1. Background and Motivation
1.2. Literature Review
1.3. Contribution and Organisation
- It introduces complex TSO requirements to a quadratically constrained quadratic programming optimisation problem that can be efficiently and timely solved.
- It considers the constraints of the distribution system to ensure that DER compensation does not compromise network currents and voltages.
- It cakes use of a short-term MPC framework that ensures control actions do not negatively affect the compliance with the requirement within the specified time frame set by the regulation.
2. Problem Formulation
2.1. Problem Definition
2.2. Model Formulation
2.2.1. Reformulating (18)
2.2.2. Expanding (23)
2.3. Control Strategy
3. Case Study
3.1. Case Description
3.2. Benchmark Case
3.3. Results, Single Hour
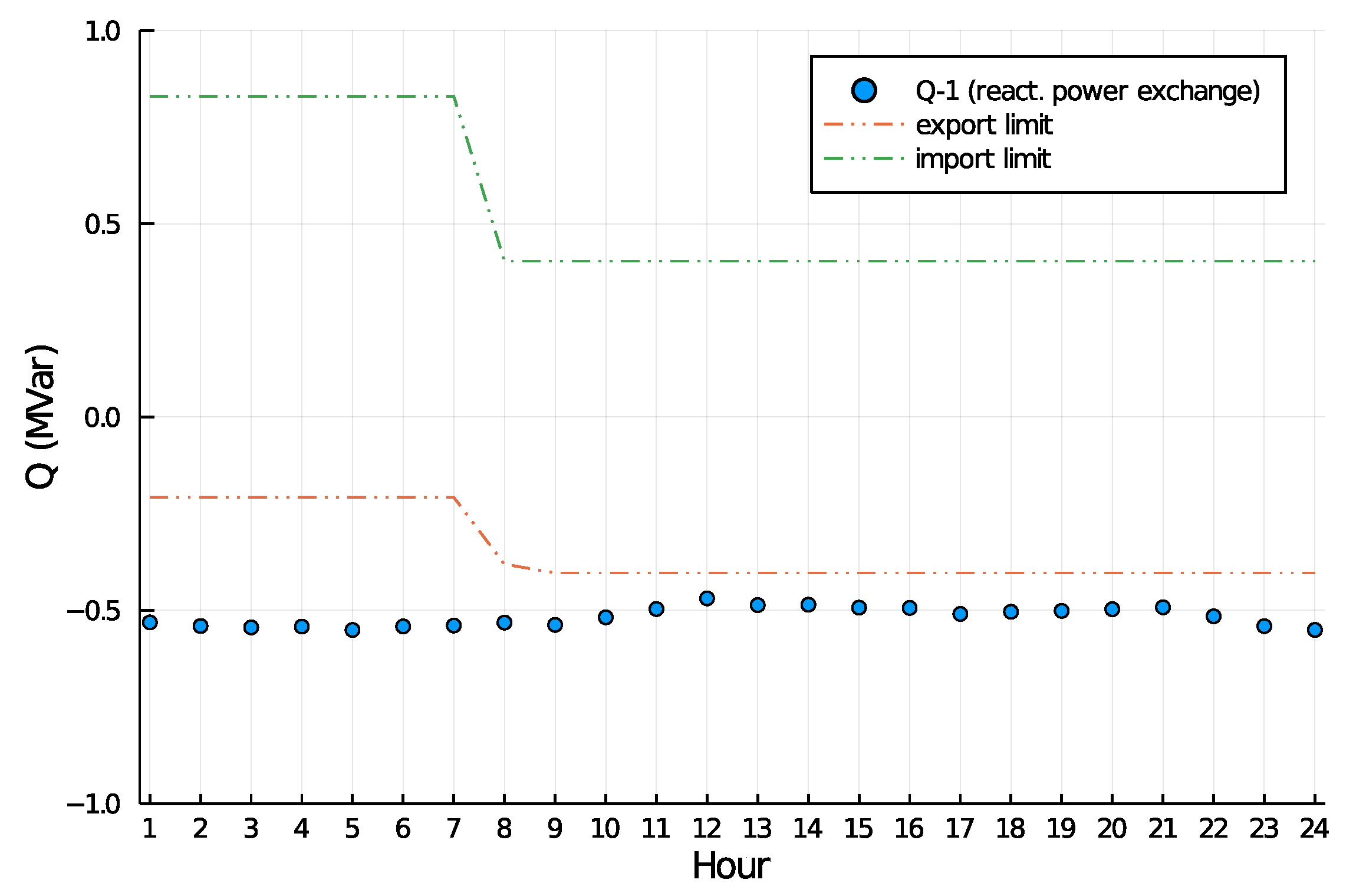
3.4. Results, Full Day
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pediaditis, P.; Ziras, C.; Hu, J.; You, S.; Hatziargyriou, N. Decentralized DLMPs with synergetic resource optimization and convergence acceleration. Electr. Power Syst. Res. 2020, 187, 106467. [Google Scholar] [CrossRef]
- Cuffe, P.; Smith, P.; Keane, A. Capability Chart for Distributed Reactive Power Resources. IEEE Trans. Power Syst. 2014, 29, 15–22. [Google Scholar] [CrossRef]
- Stanković, S.; Söder, L. Analytical Estimation of Reactive Power Capability of a Radial Distribution System. IEEE Trans. Power Syst. 2018, 33, 6131–6141. [Google Scholar] [CrossRef]
- Cabadag, R.I.; Schmidt, U.; Schegner, P. Reactive power capability of a sub-transmission grid using real-time embedded particle swarm optimization. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Istanbul, Turkey, 12–15 October 2014; pp. 1–6. [Google Scholar]
- Morin, J.; Colas, F.; Guillaud, X.; Grenard, S.; Dieulot, J.Y. Rules based voltage control for distribution networks combined with TSO- DSO reactive power exchanges limitations. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–6. [Google Scholar]
- Stock, D.S.; Venzke, A.; Hennig, T.; Hofmann, L. Model predictive control for reactive power management in transmission connected distribution grids. In Proceedings of the 2016 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Xi’an, China, 25–28 October 2016; pp. 419–423. [Google Scholar]
- Stock, D.S.; Sala, F.; Berizzi, A.; Hofmann, L. Optimal Control of Wind Farms for Coordinated TSO-DSO Reactive Power Management. Energies 2018, 11, 173. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Kraiczy, M.; Schmidt, S.; Wirtz, F.; Toebermann, C.; Ernst, B.; Kaempf, E.; Braun, M. Reactive Power Management at the Network Interface of EHV- and HV Level. In Proceedings of the International ETG Congress 2017, Bonn, Germany, 28–29 November 2017; pp. 1–6. [Google Scholar]
- Buire, J.; Colas, F.; Dieulot, J.Y.; Guillaud, X. Stochastic Optimization of PQ Powers at the Interface between Distribution and Transmission Grids. Energies 2019, 12, 4057. [Google Scholar] [CrossRef] [Green Version]
- Finland’s Trasmission System Operateor (FINGRID). Supply of Reactive Power and Maintenance of Reactive Power Reserves. 2021. Available online: https://www.fingrid.fi/globalassets/dokumentit/en/customers/power-transmission/supply-of-reactive-power-and-maintenance-of-reactive-power-reserves-2021-id-269130.pdf (accessed on 31 May 2021).
- Sirviö, K.; Laaksonen, H.; Kauhaniemi, K. Active Network Management Scheme for Reactive Power Control. In Proceedings of the CIRED Workshop 2018 on Microgirds and Local Energy Communities, Ljubljana, Slovenia, 7–8 June 2018. [Google Scholar]
- EU. Network Code on Demand Connection; EU: Brussels, Belgium, 2016. [Google Scholar]
- Finland’s Trasmission System Operateor (FINGRID). Supply of Reactive Power and Maintenance of Reactive Power Reserves; FINGRID: Helsinki, Finland, 2017. [Google Scholar]
- Laaksonen, H.; Hovila, P. Flexzone concept to enable resilient distribution grids—Possibilities in Sundom Smart Grid. In Proceedings of the CIRED Workshop 2016, Helsinki, Finland, 14–15 June 2016; pp. 1–4. [Google Scholar]
- Laaksonen, H.; Hovila, P. Future-proof islanding detection schemes in Sundom Smart Grid. CIRED Open Access Proc. J. 2017, 2017, 1777–1781. [Google Scholar] [CrossRef] [Green Version]
- Uebermasser, S. Requirements for coordinated ancillary services covering different voltage levels. CIRED Open Access Proc. J. 2017, 2017, 1421–1424. [Google Scholar] [CrossRef]
- Sirviö, K.; Mekkanen, M.; Kauhaniemi, K.; Laaksonen, H.; Salo, A.; Castro, F.; Ansari, S.; Babazadeh, D. Controller Development for Reactive Power Flow Management Between DSO and TSO Networks. In Proceedings of the 2019 IEEE PES Innovative Smart Grid Technologies Europe (ISGT-Europe), Bucharest, Romania, 29 September–2 October 2019; pp. 1–5. [Google Scholar]
- Sirviö, K.; Mekkanen, M.; Kauhaniemi, K.; Laaksonen, H.; Salo, A.; Castro, F.; Ansari, S.; Babazadeh, D. Testing an IEC 61850-based Light-weighted Controller for Reactive Power Management in Smart Distribution Grids. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 6469–6474. [Google Scholar]
- Sirviö, K.; Mekkanen, M.; Kauhaniemi, K.; Laaksonen, H.; Salo, A.; Castro, F.; Babazadeh, D. Accelerated Real-Time Simulations for Testing a Reactive Power Flow Controller in Long-Term Case Studies. J. Electr. Comput. Eng. 2020, 2020, 8265373. [Google Scholar] [CrossRef]
- Baran, M.; Wu, F. Network reconfiguration in distribution systems for loss reduction and load balancing. IEEE Trans. Power Deliv. 1989, 4, 1401–1407. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, MA, USA, 2004. [Google Scholar]
- Šulc, P.; Backhaus, S.; Chertkov, M. Optimal Distributed Control of Reactive Power Via the Alternating Direction Method of Multipliers. IEEE Trans. Energy Convers. 2014, 29, 968–977. [Google Scholar] [CrossRef] [Green Version]
- Bezanson, J.; Edelman, A.; Karpinski, S.; Shah, V.B. Julia: A fresh approach to numerical computing. SIAM Rev. 2017, 59, 65–98. [Google Scholar] [CrossRef] [Green Version]
- Dunning, I.; Huchette, J.; Lubin, M. JuMP: A Modeling Language for Mathematical Optimization. SIAM Rev. 2017, 59, 295–320. [Google Scholar] [CrossRef]
- Gurobi Optimization, LLC. Gurobi Optimizer Reference Manual; Gurobi Optimization, LLC: Houston, TX, USA, 2021. [Google Scholar]
- Laaksonen, H.; Sirviö, K.; Aflecht, S.; Hovila, P. Multi-objective active network management scheme studied in Sundom smart grid with MV and LV network connected DER units. In Proceedings of the 25th International Conference on Electricity Distribution: CIRED 2019, Madrid, Spain, 3–6 June 2019. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node | 2 | 3 | 4 | 5 | 6 | 7 | 9 | 12 |
|---|---|---|---|---|---|---|---|---|
| min P (MW) | 0.08 | 0.0 | 0.0 | 0.12 | 0.15 | 0.0 | 0.20 | 0.02 |
| max P (MW) | 0.22 | 0.0 | 0.0 | 0.37 | 0.47 | 0.0 | 0.73 | 0.07 |
| min Q (MVar) | −0.06 | 0.0 | 0.0 | −0.09 | −0.09 | 0.0 | −0.22 | −0.06 |
| max Q (MVar) | −0.04 | 0.0 | 0.0 | −0.06 | −0.05 | 0.0 | −0.14 | −0.05 |
| DER (Node) | PV (10) | WT (10) |
|---|---|---|
| Capacity (MW) | 0.6 | 3.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pediaditis, P.; Sirviö, K.; Ziras, C.; Kauhaniemi, K.; Laaksonen, H.; Hatziargyriou, N. Compliance of Distribution System Reactive Flows with Transmission System Requirements. Appl. Sci. 2021, 11, 7719. https://doi.org/10.3390/app11167719
Pediaditis P, Sirviö K, Ziras C, Kauhaniemi K, Laaksonen H, Hatziargyriou N. Compliance of Distribution System Reactive Flows with Transmission System Requirements. Applied Sciences. 2021; 11(16):7719. https://doi.org/10.3390/app11167719
Chicago/Turabian StylePediaditis, Panagiotis, Katja Sirviö, Charalampos Ziras, Kimmo Kauhaniemi, Hannu Laaksonen, and Nikos Hatziargyriou. 2021. "Compliance of Distribution System Reactive Flows with Transmission System Requirements" Applied Sciences 11, no. 16: 7719. https://doi.org/10.3390/app11167719
APA StylePediaditis, P., Sirviö, K., Ziras, C., Kauhaniemi, K., Laaksonen, H., & Hatziargyriou, N. (2021). Compliance of Distribution System Reactive Flows with Transmission System Requirements. Applied Sciences, 11(16), 7719. https://doi.org/10.3390/app11167719