
Design and Trajectory Tracking Control of a Magnetorheological Prosthetic Knee Joint




Abstract
:1. Introduction
2. Design of MR Prosthetic Knee Joint
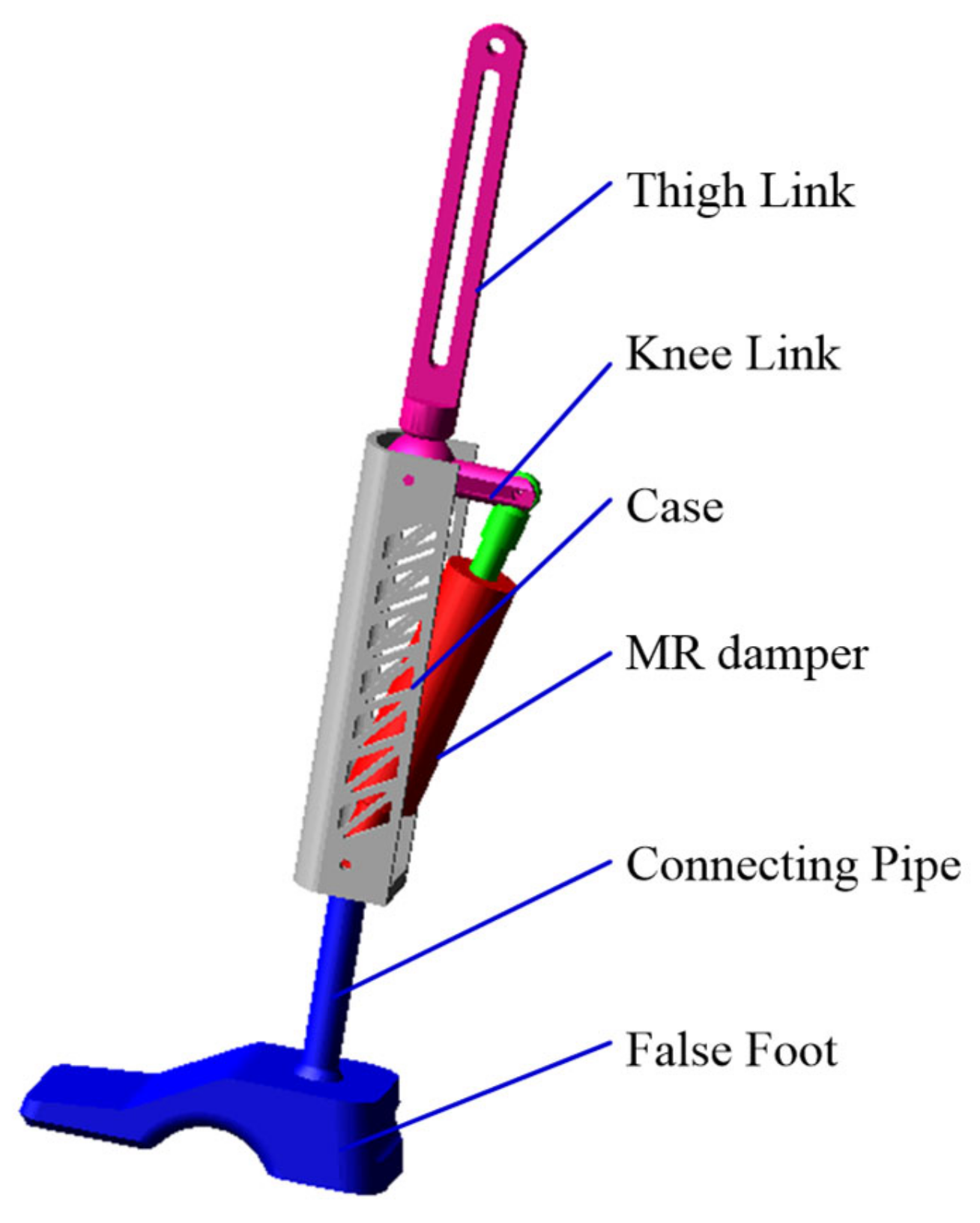
2.1. Working Principle of MR Prosthetic Knee Joint
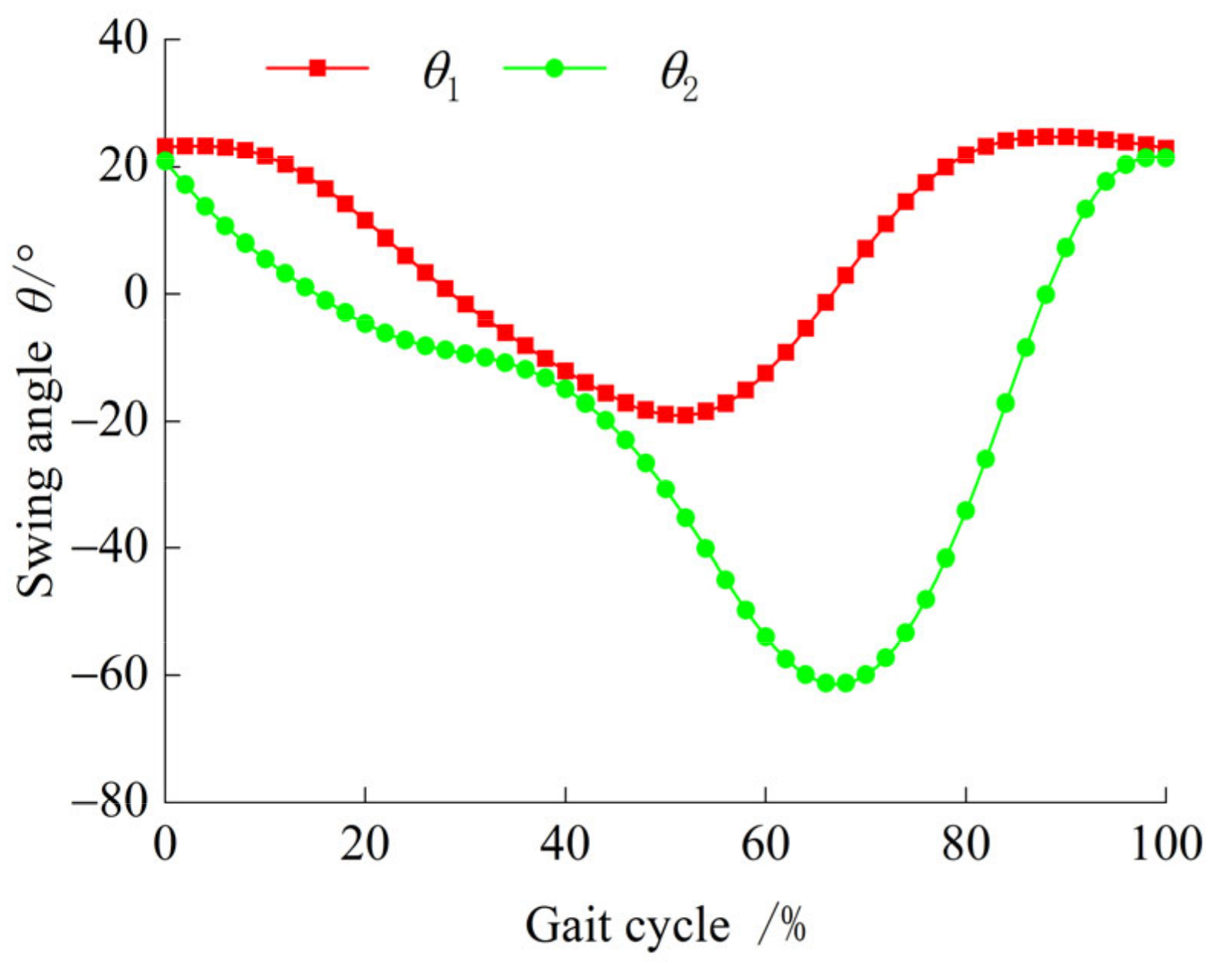
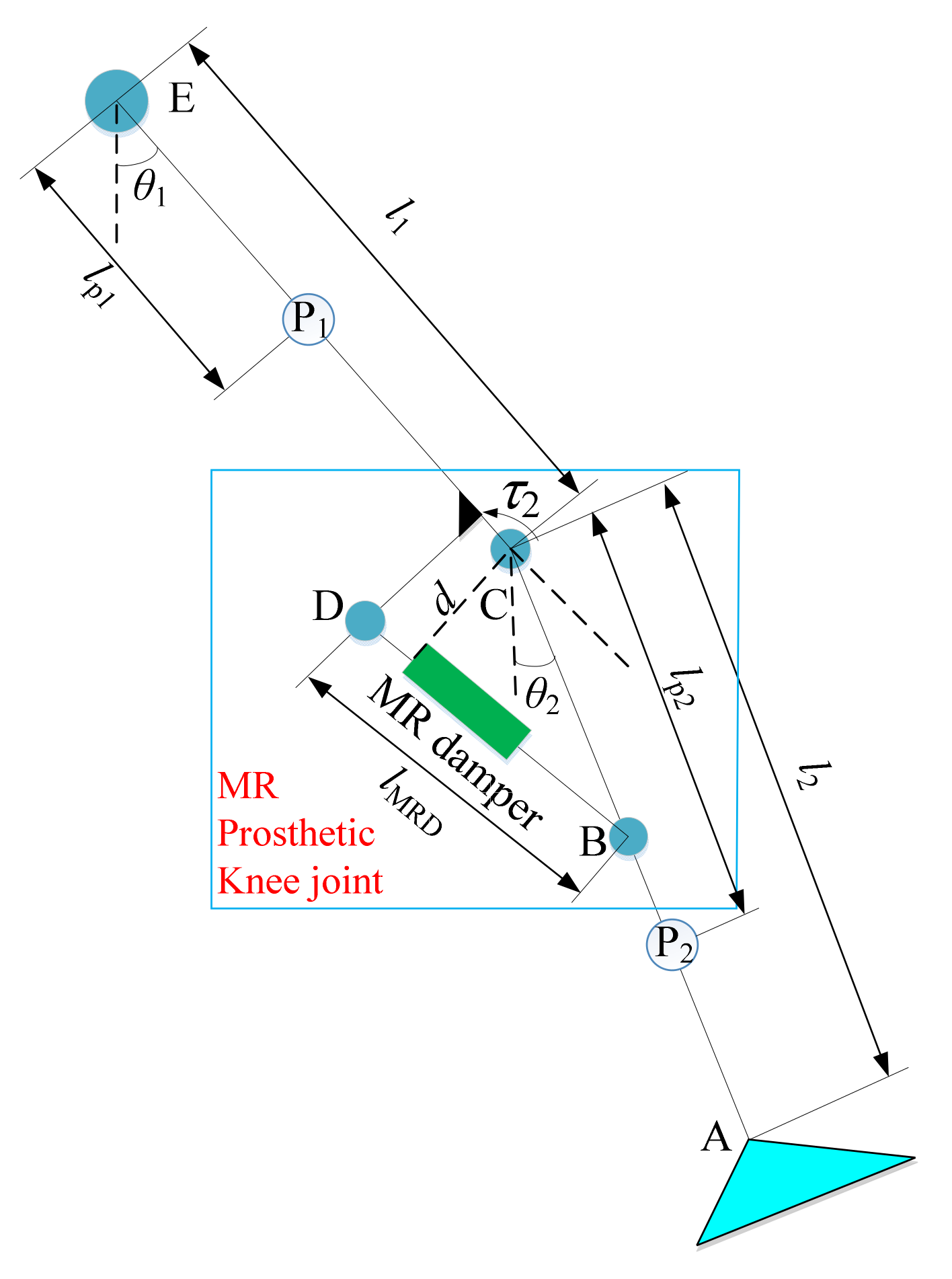
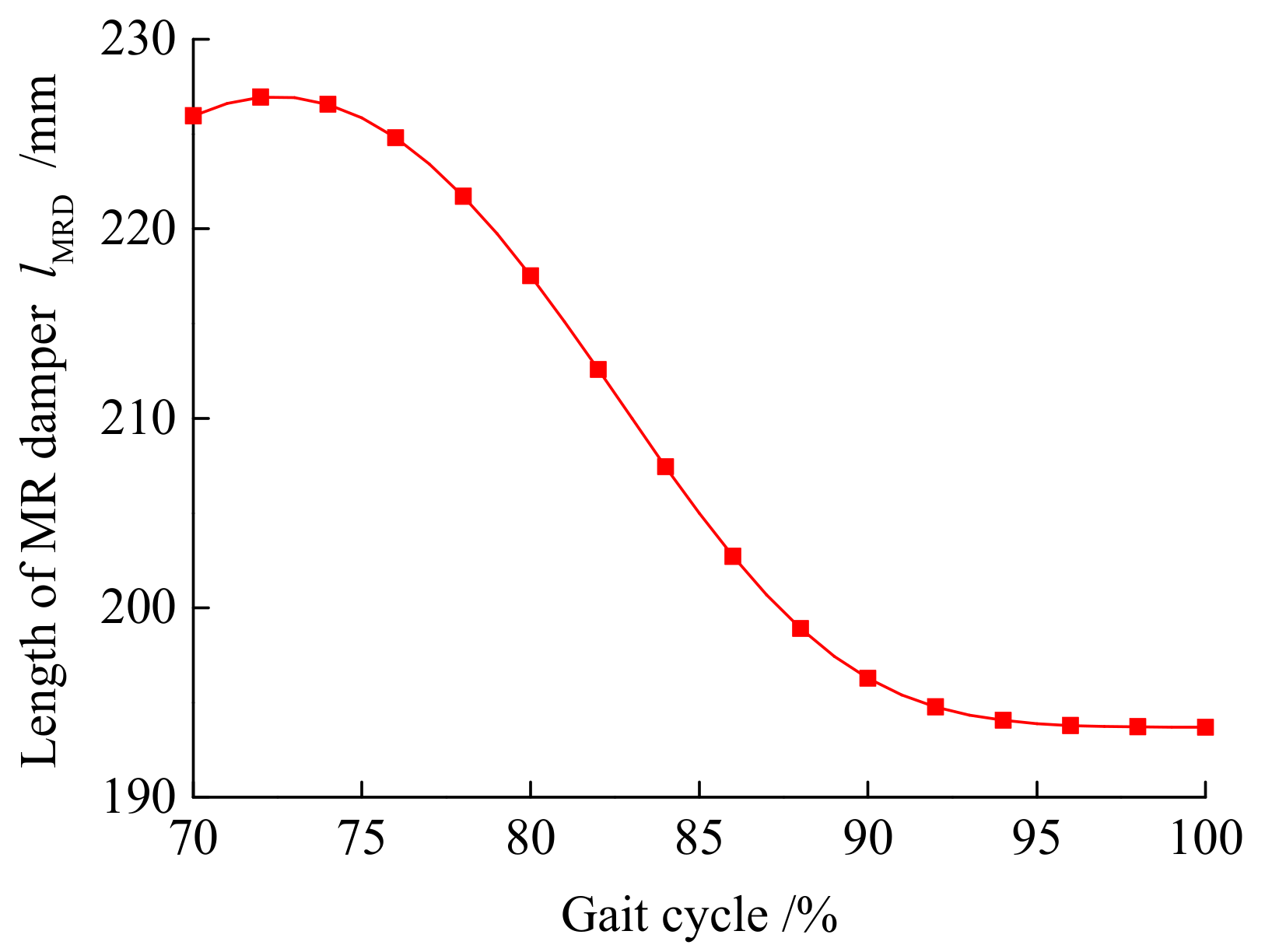
2.2. Kinetic Modeling of MR Prosthetic Knee Joint
3. Design of MR Damper Used in the MR Prosthetic Knee Joint
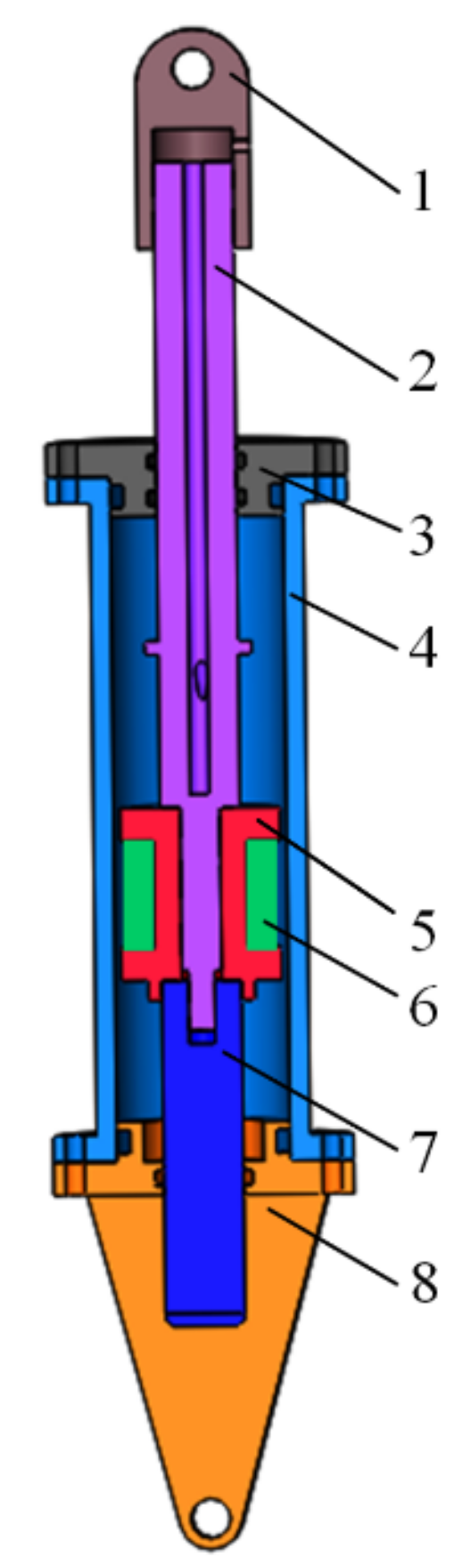
3.1. Structure Principle of the Proposed MR Damper
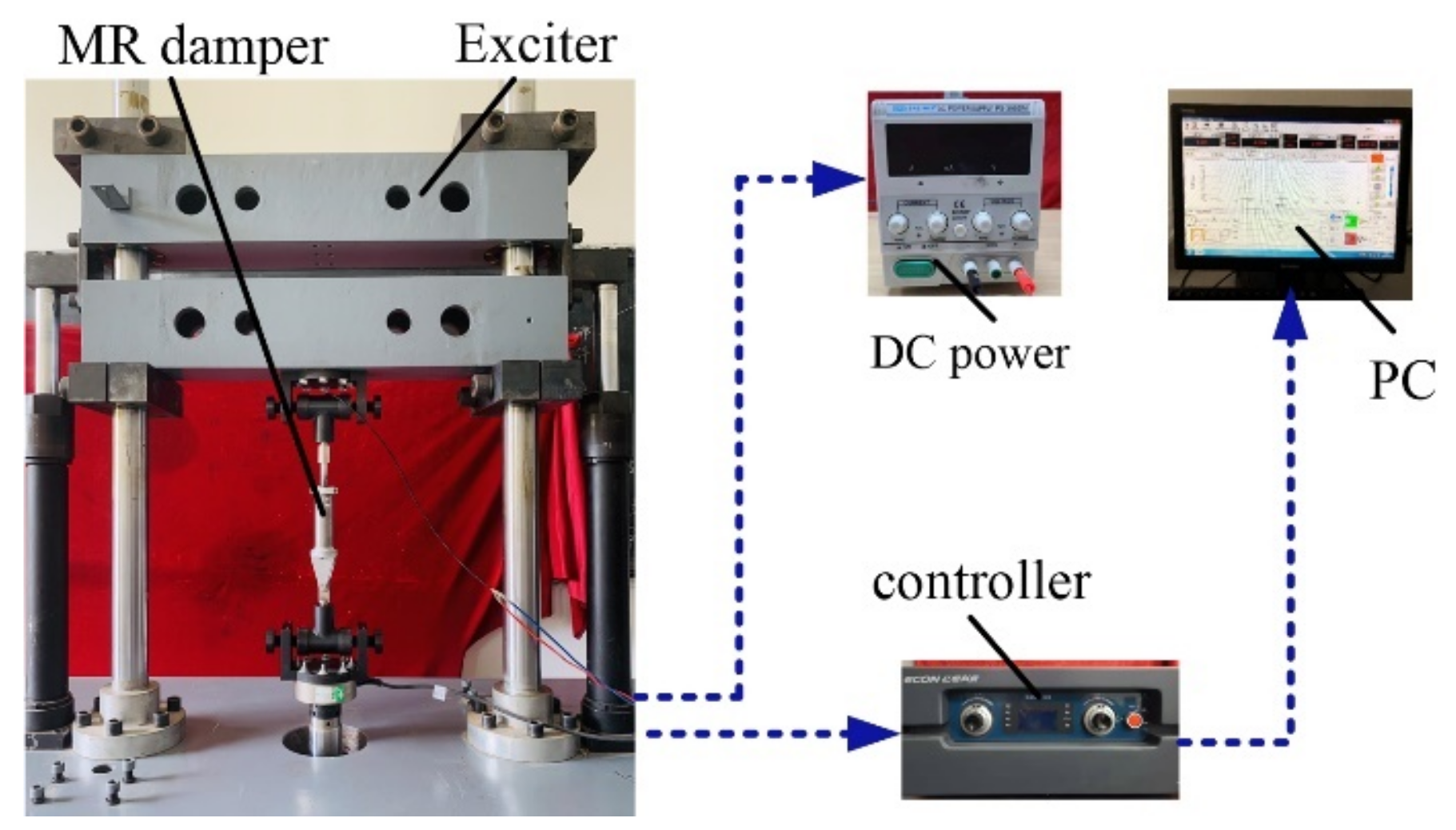
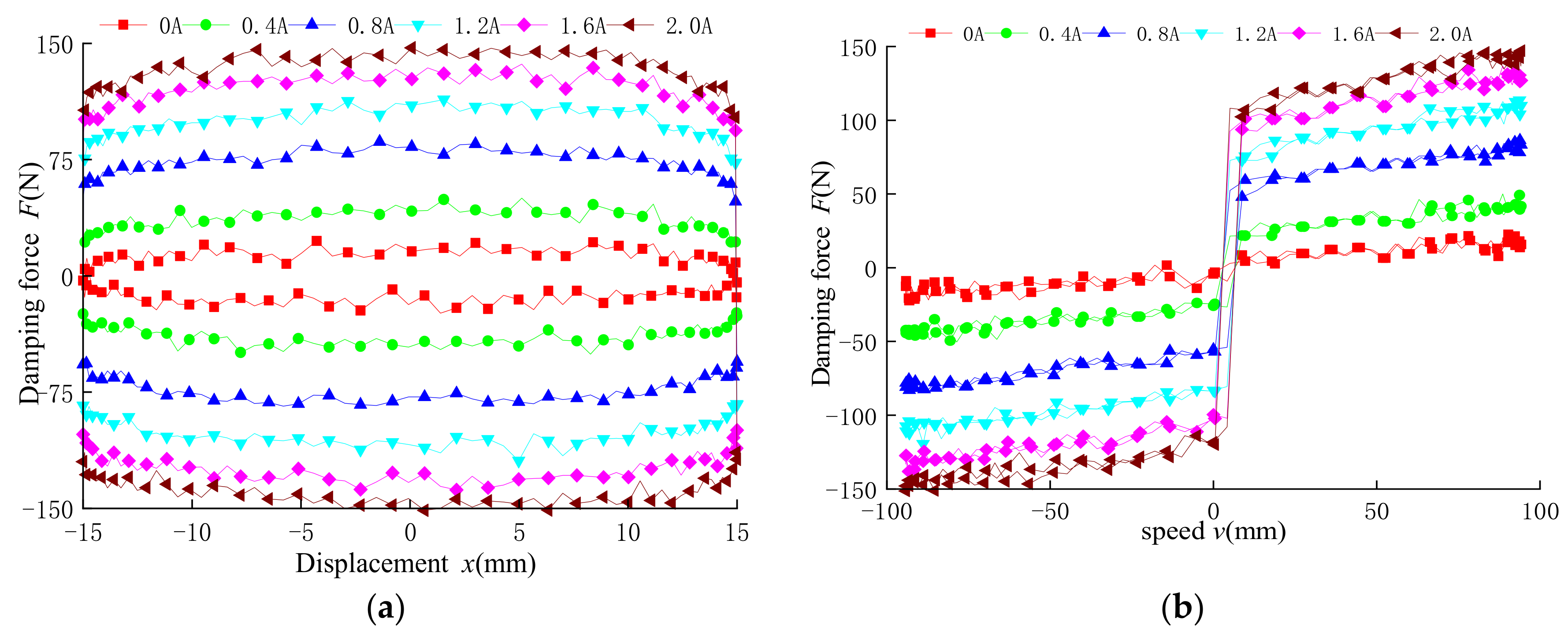
3.2. Dynamic Performance Tests of the Proposed MR Damper
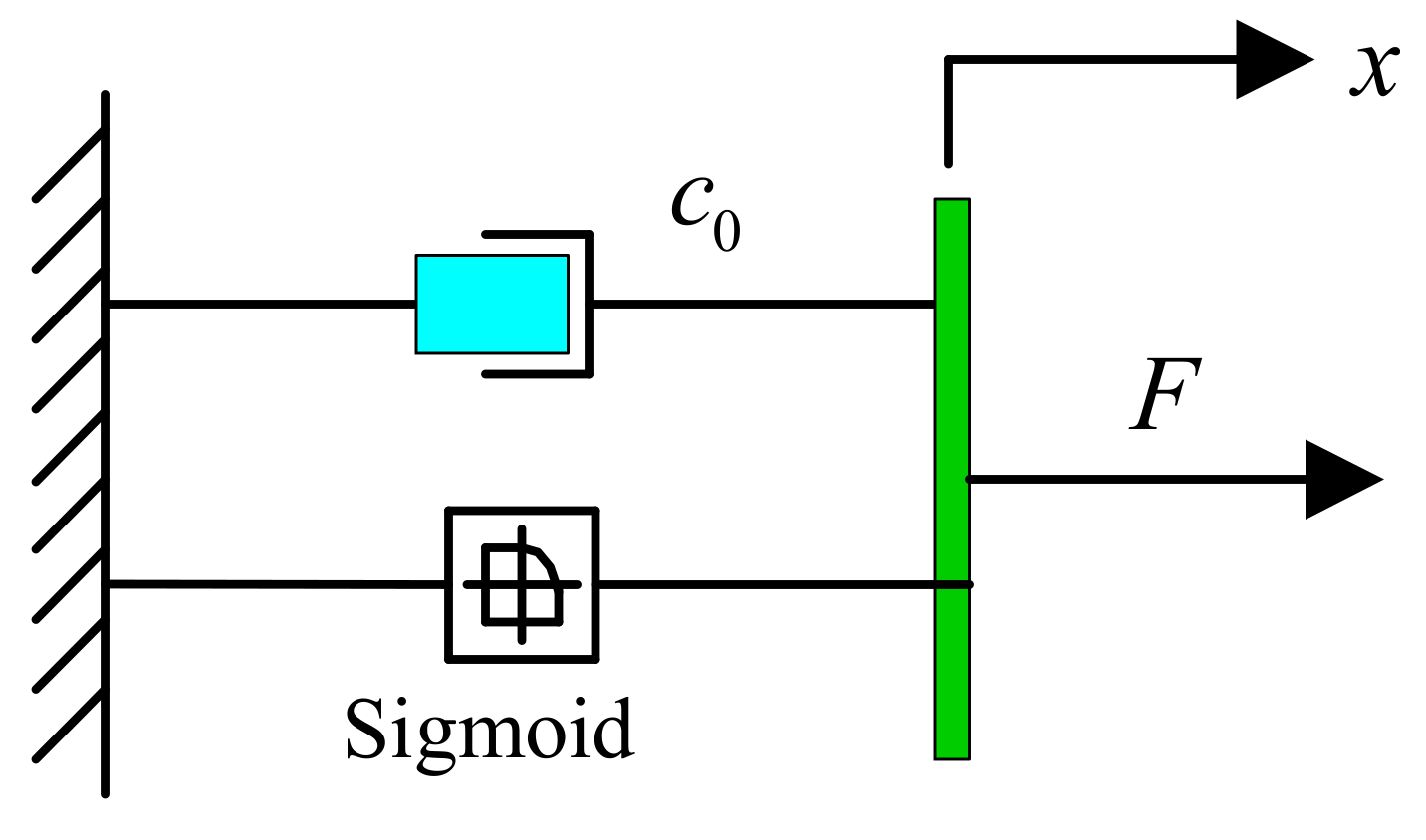
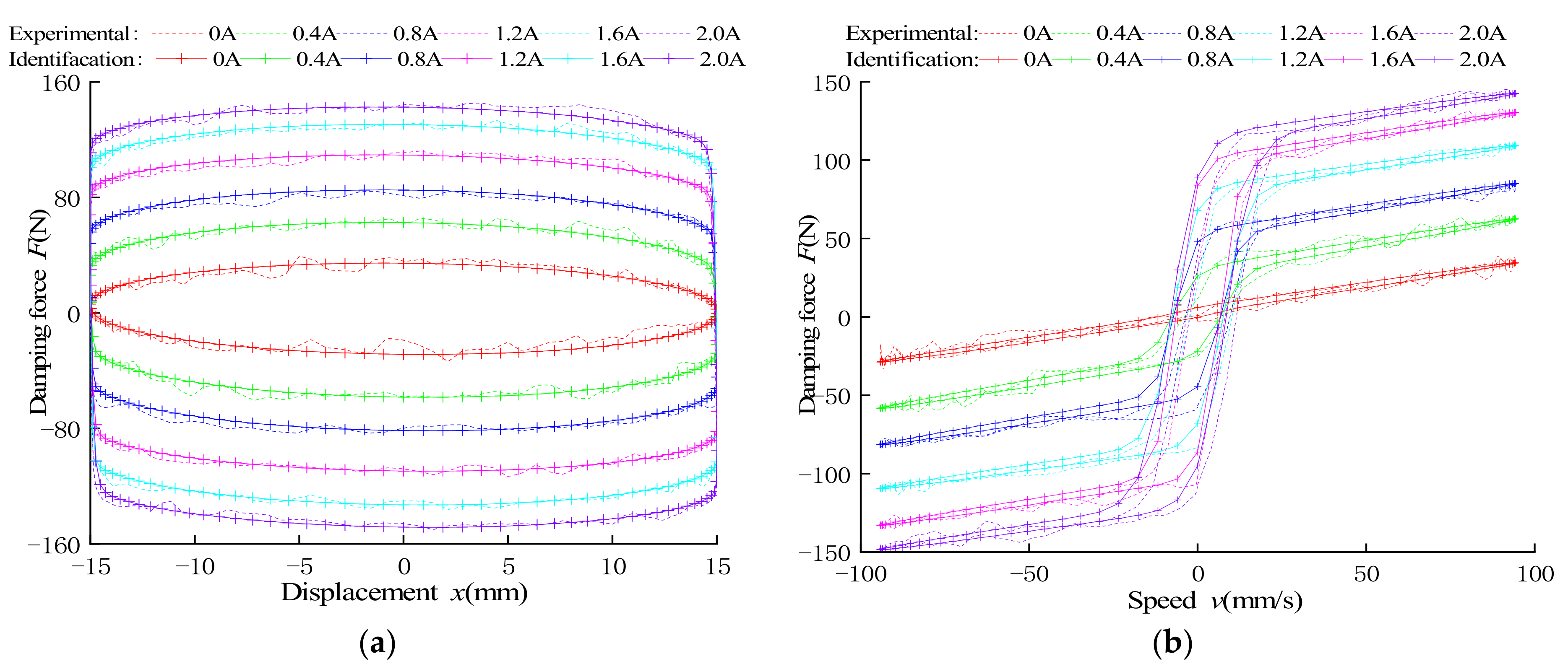
3.3. Establishment of Forward Mechanics Model of the MR Damper
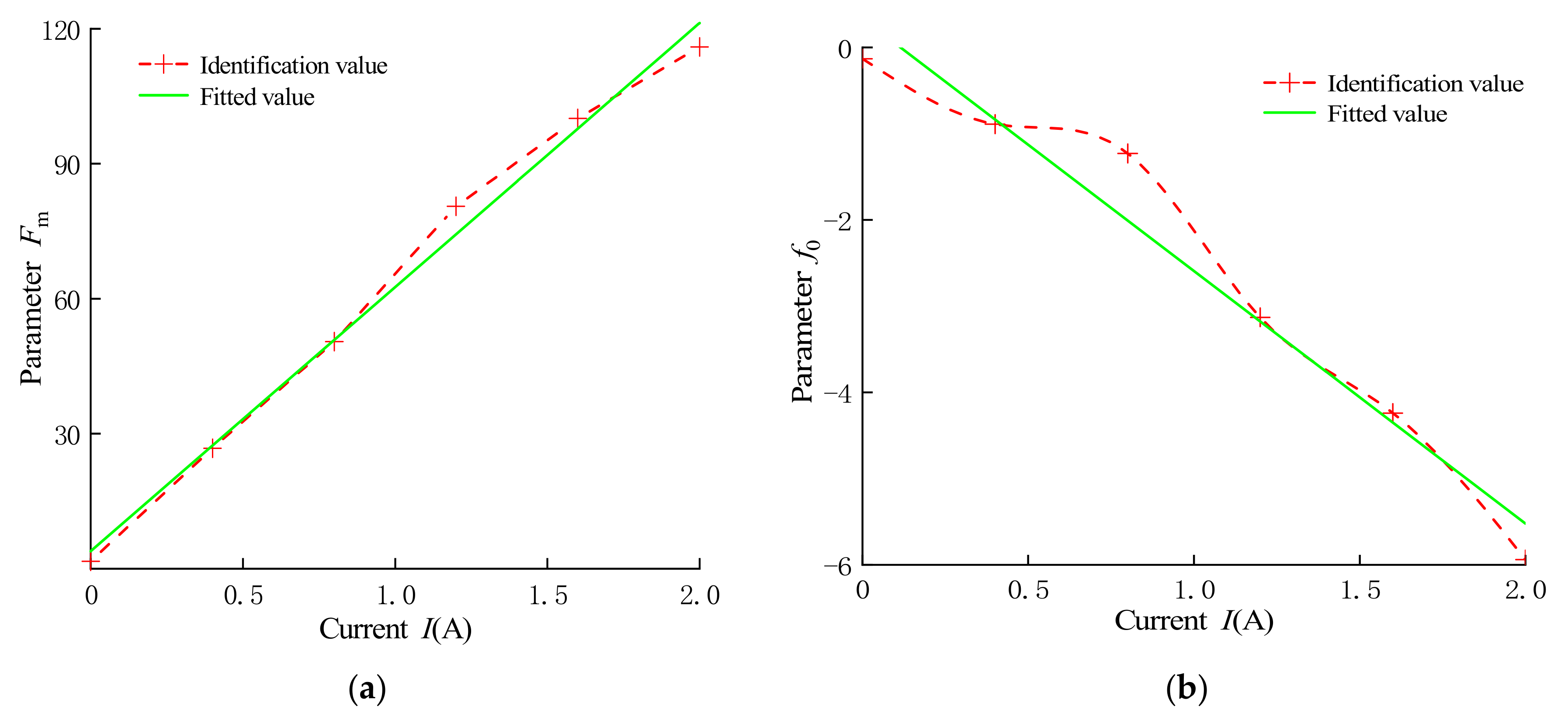
3.4. Establishment of Reverse Mechanics Model of the MR Damper
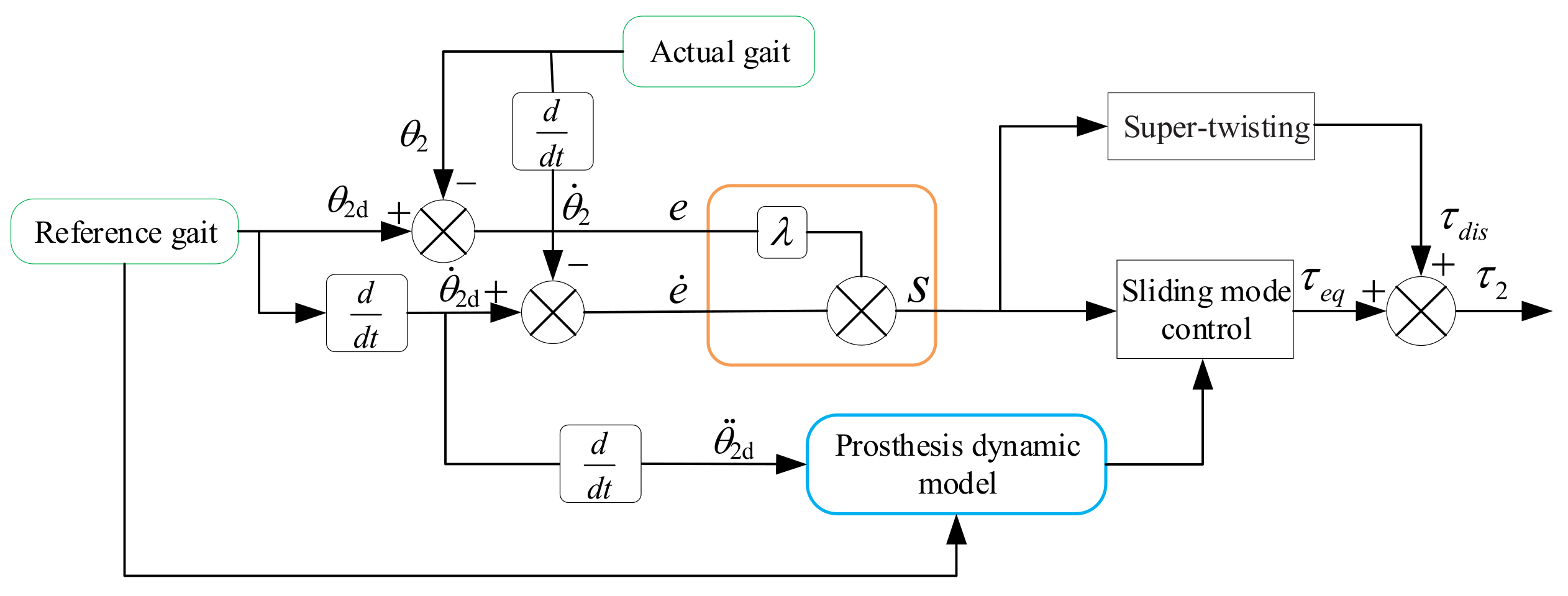
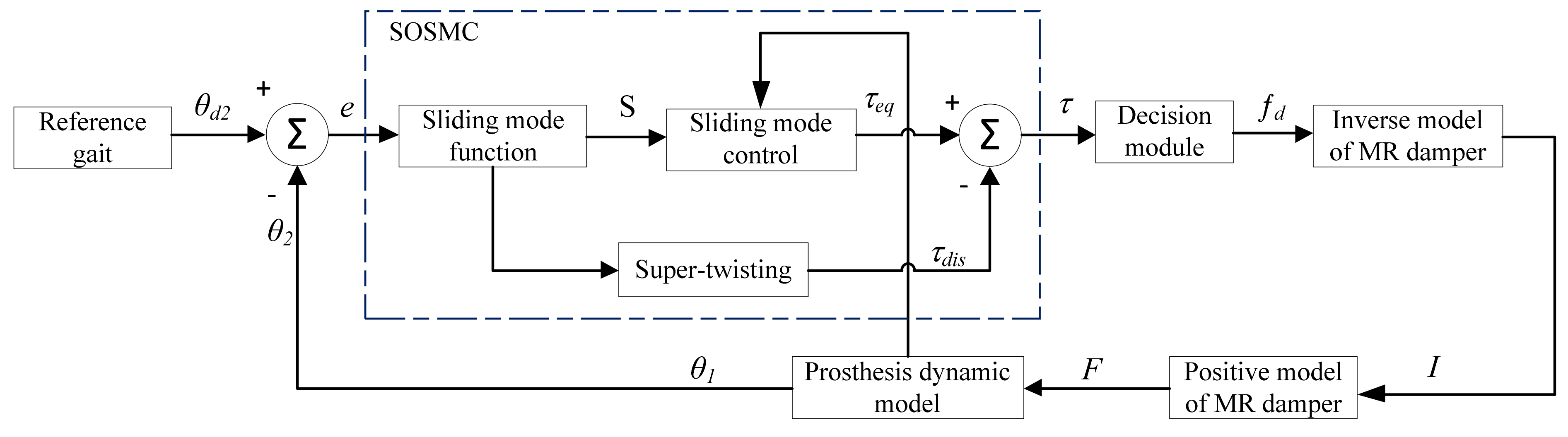
4. Trajectory Tracking Control Based on Second-Order Sliding Mode
5. Analysis of Trajectory Tracking Control of MR Prosthesis Knee Joint
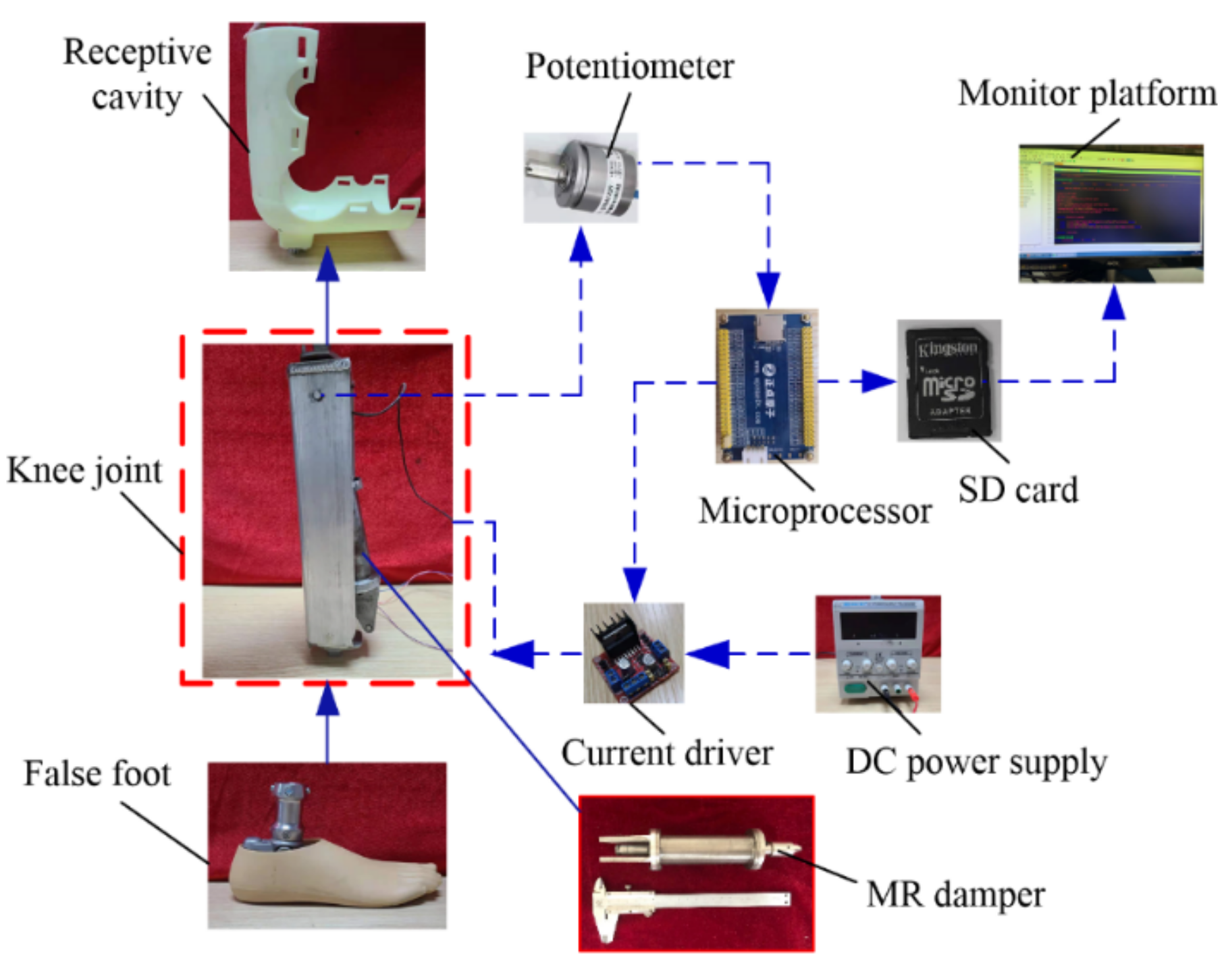
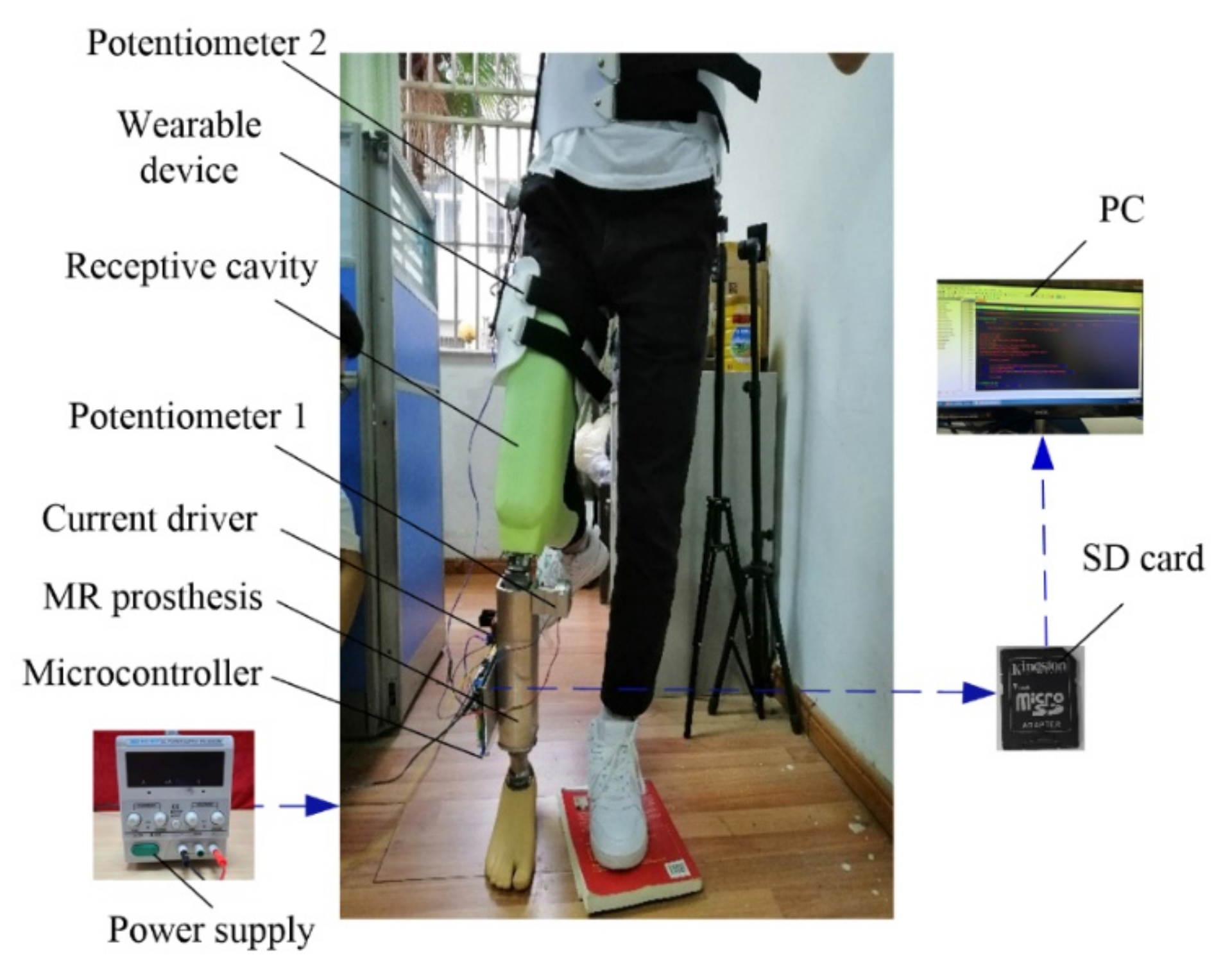
5.1. Test System Setup
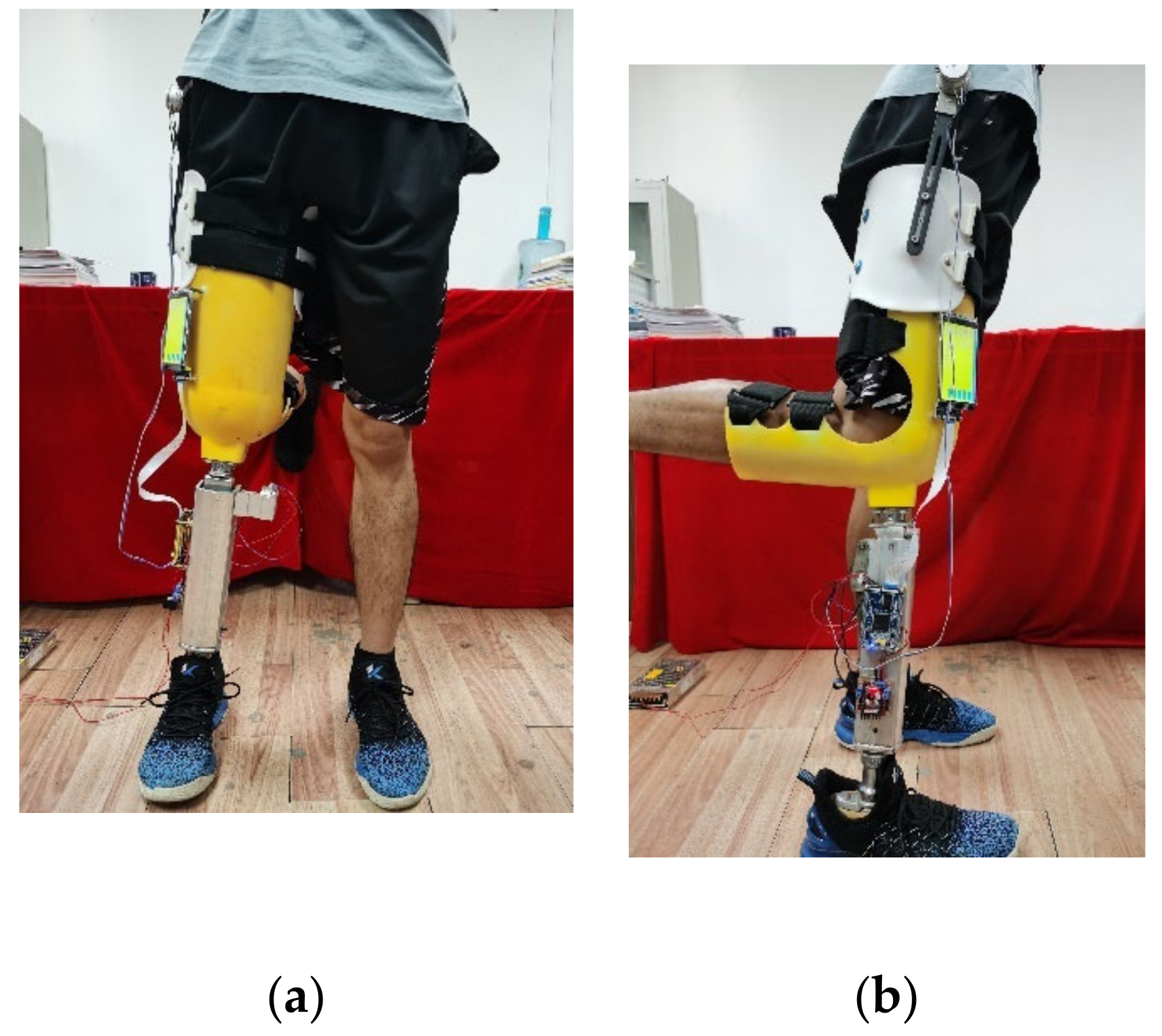
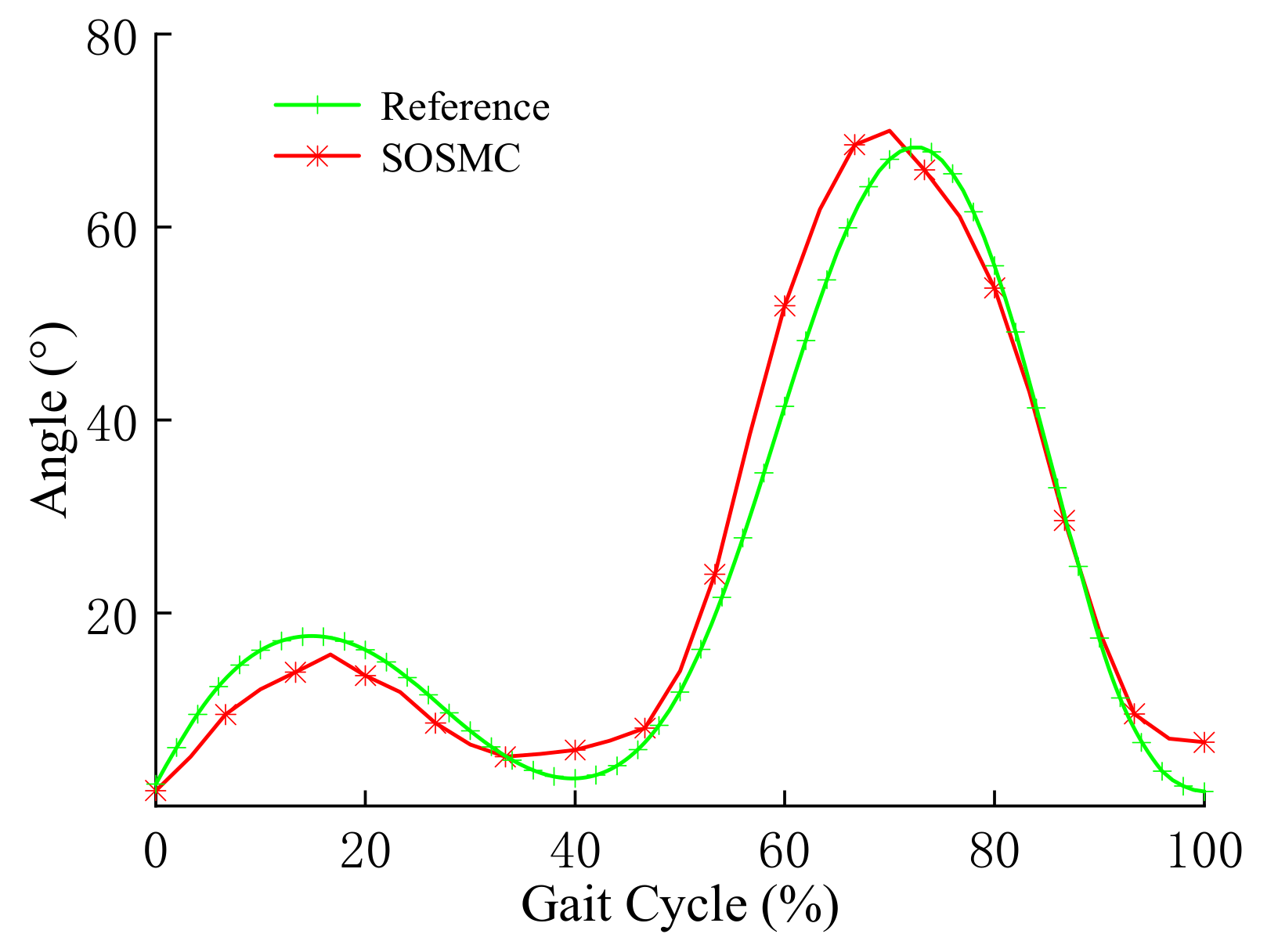
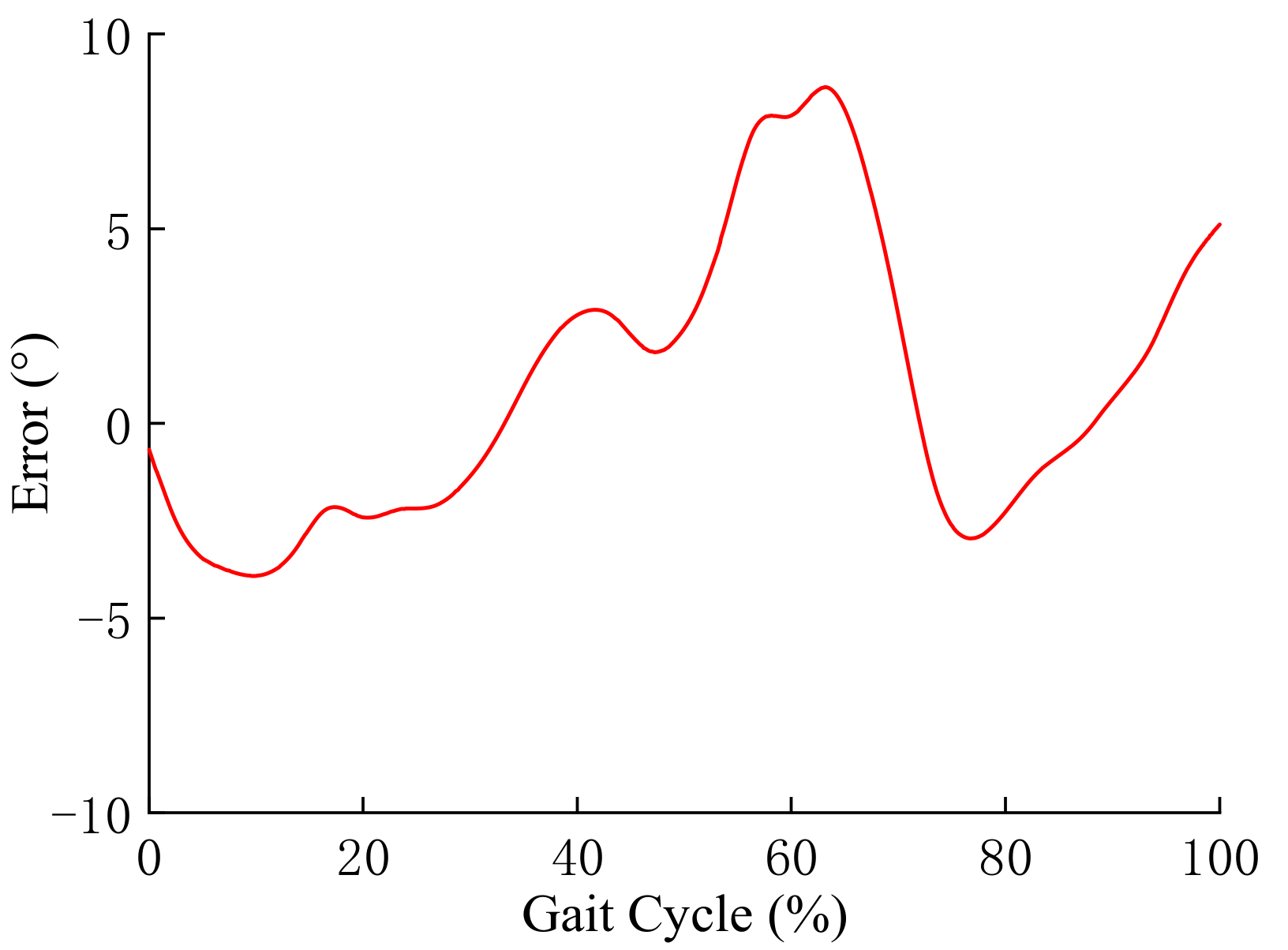
5.2. Analysis of Trajectory Tracking Control
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Segal, A.D.; Orendurff, M.S.; Klute, G.K.; Mcdowell, M.L.; Pecoraro, J.; Czerniecki, J.M. Kinematic and kinetic comparisons of transfemoral amputee gait using C-Leg and Mauch SNS prosthetic knees. J. Rehabil. Res. Dev. 2006, 43, 857–869. [Google Scholar] [CrossRef] [PubMed]
- Price, M.A.; Beckerle, P.; Sup, F.C. Design optimization in lower limb prostheses: A review. IEEE Trans. Neural Syst. Rehabilit 2019, 27, 1574–1588. [Google Scholar] [CrossRef] [PubMed]
- Pi, M.; Li, Z.; Li, Q.; Kan, Z.; Xu, C.; Kang, Y.; Su, C.; Yang, C. Biologically inspired deadbeat control of robotic leg prostheses. IEEE-ASME Trans. Mechatron. 2020, 25, 2733–2742. [Google Scholar] [CrossRef]
- Varol, H.A.; Goldfarb, M. Decomposition-based control for a powered knee and ankle transfemoral prosthesis. In Proceedings of the IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, The Netherlands, 13–15 June 2007; pp. 783–789. [Google Scholar]
- Pauw, K.D.; Serrien, B.; Baeyens, J.P.; Cherelle, P.; Meeusen, R. Prosthetic gait of unilateral lower-limb amputees with current and novel prostheses: A pilot study. Clin. Biomech. 2020, 71, 59–67. [Google Scholar] [CrossRef] [PubMed]
- Cho, J.; Kong, K. Mechanism design of a robotic leg for running considering radial force producibility and tangential mobility. Int. J. Control Autom. 2020, 34, 34–42. [Google Scholar] [CrossRef]
- Convens, B.; Dong, D.; Furnemont, R.; Verstraten, T.; Vanderborght, B. Modeling, design and test-bench validation of a semi-active propulsive ankle prosthesis with a clutched series elastic actuator. IEEE Robot. Autom. Lett. 2019, 4, 1823–1830. [Google Scholar] [CrossRef]
- Hu, G.; Zhang, J.; Zhong, F.; Yu, L. Performance evaluation of an improved radial magnetorheological valve and its application in the valve controlled cylinder system. Smart Mater. Struct. 2019, 28, 047003. [Google Scholar] [CrossRef]
- Ruan, X.; Xuan, S.; Zhao, J.; Bian, H.; Gong, X. Mechanical performance of a novel magnetorheological fluid damper based on squeeze-valve bi-mode of MRF. Smart Mater. Struct. 2020, 29, 55018. [Google Scholar] [CrossRef]
- Arteaga, O.; Terán, H.C.; Morales, H. Design of Human Knee Smart Prosthesis with Active Torque Control. Int. J. Mech. Eng. Robot. Res. 2020, 9, 14–22. [Google Scholar] [CrossRef]
- Ochoa-Diaz, C.; Rocha, T.S.; Oliveira, L.D.L.; Paredes, M.G.; Borges, G.A. An above-knee prosthesis with magnetorheological variable-damping. In Proceedings of the 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, IEEE, Sao Paulo, Brazil, 12–15 August 2014; pp. 108–113. [Google Scholar]
- Xu, L.; Wang, D.H.; Fu, Q.; Yuan, G.; Bai, X.X. A novel motion platform system for testing prosthetic knees. Measurement 2019, 51, 139–151. [Google Scholar] [CrossRef]
- Xie, H.L.; Liang, Z.; Li, F.; Guo, L.X. The knee joint design and control of above-knee intelligent bionic leg based on magnetorheological damper. Int. J. Autom. Comput. 2010, 7, 277–282. [Google Scholar] [CrossRef]
- Bulea, T.C.; Kobetic, R.; To, C.S.; Audu, M.L.; Schnellenberger, J.R.; Triolo, R.J. A Variable Impedance Knee Mechanism for Controlled Stance Flexion During Pathological Gait. IEEE-ASME Trans. Mechatron. 2012, 17, 822–832. [Google Scholar] [CrossRef]
- Herr, H.M.; Wilkenfeld, A.; Bleck, O. Speed-Adaptive and Patient-Adaptive Prosthetic Knee. U.S. Patent 6,610,101, 26 August 2003. [Google Scholar]
- Nandi, G.C.; Ijspeert, A.J.; Chakraborty, P.; Nandi, A. Development of adaptive modular active leg (AMAL) using bipedal robotics technology. Robot. Auton. Syst. 2009, 57, 603–616. [Google Scholar] [CrossRef]
- Park, J.; Yoon, G.H.; Kang, J.W.; Choi, S.B. Design and control of a prosthetic leg for above-knee amputees operated in semi-active and active modes. Smart Mater. Struct. 2016, 25, 085009. [Google Scholar] [CrossRef]
- Cong, D.; Xu, X. Swing phase control of magnetorheological fluid intelligent artificial leg. J. Syst. Simul. 2006, 18, 916–922. [Google Scholar]
- Kim, J.H.; Oh, J.H. Development of an above knee prosthesis using MRD and leg simulator. In Proceedings of the 2001 IEEE International Conference on Robotics and Automation, Seoul, Korea, 1 February 2001; pp. 3686–3691. [Google Scholar]
- Fu, Q.; Wang, D.H.; Xu, L.; Gang, Y. A magnetorheological damper-based prosthetic knee and sliding mode tracking control method for an MRPK-based lower limb prosthesis. Smart Mater. Struct. 2017, 26, 045030. [Google Scholar] [CrossRef]
- Scandaroli, G.; Borges, G.; Rocha, D.A.; Nascimento, D.O. Adaptive Knee Joint Control for an Active Amputee Prosthesis. In Proceedings of the 2008 IEEE Latin American Robotic Symposium, Salvador, Brazil, 29–30 October 2008; pp. 164–169. [Google Scholar]
- Peng, F.; Wen, H.; Zhang, C.; Xu, B. Adaptive robust force position control for flexible active prosthetic knee using gait trajectory. Appl. Sci. 2020, 10, 2755. [Google Scholar] [CrossRef]
- Huang, H.; Zhang, F.; Hargrove, L.J.; Dou, Z.; Rogers, D.R.; Englehart, K.B. Continuous locomotion-mode identification for prosthetic legs based on neuromuscular-mechanical fusion. IEEE Trans. Bio-Med. Eng. 2011, 58, 2867–2875. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, H.; Kuiken, T.A.; Lipschutz, R.D. A strategy for identifying locomotion modes using surface electromyography. IEEE Trans. Bio-Med. Eng. 2009, 56, 65–73. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stinus, H. Biomechanics and evaluation of the microprocessor-controlled c-leg exoprosthesis knee joint. Z. Orthopädie Ihre. Grenzgeb. 2000, 138, 278–282. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Control method | Advantage | Disadvantage | Citation |
|---|---|---|---|---|
| 1 | Finite state machine | Solves the problem that human gait cannot be fully measured | Open loop control, poor adaptability, unable to adjust for different sports and users | Herr et al. [15] |
| 2 | PD control | Simple structure and wide application | Parameter setting depends on experience | Nandi and Park [16,17] |
| 3 | PD+CT/Iterative Learning/Neural Network | Solves the problem of nonlinear and strong coupling interference in the prosthetic system | The system model is complex and has poor adaptability | Cong and Kim [18,19] |
| 4 | Sliding mode control | Solves the hysteresis effect of MR damper, with good robustness | It is easy to cause chattering in the control system | Fu [20] |
| 5 | Model reference adaptive control | Modeling and identification errors are small, and the adaptive ability is strong | The tracking effect depends on the accuracy of the reference model | Scandaroli [21] |
| 6 | Adaptive robust force/position control | Solves the problem of strong coupling of prosthetic system parameters, has better trajectory tracking characteristics, and has good robustness | Incorporating time delay estimation technology, sliding mode control, fuzzy control; the neural network that the control system uses is cumbersome and complicated | Fang et al. [22] |
| 7 | Electromyography signal control | Good bionics, high road condition recognition ability and human-machine coordination ability during the support period | Control effect is not good in the swing period, high cost in the system. | Huang et al. [23,24] |
| i | a1i | a2i | a3i | b1i | b2i | b3i |
|---|---|---|---|---|---|---|
| 1 | 9.169 | 23.88 | 0.582 | 2.798 | 0.495 | −2.289 |
| 2 | 9.522 | 14.17 | 0.041 | 12.5 | 1.494 | 2.525 |
| 3 | 23.54 | 37.13 | 3.735 | 5.175 | 2.398 | 1.184 |
| 4 | 10.37 | 3.573 | 9.817 | 19.38 | −6.663 | −2.905 |
| 5 | −13.07 | 3.119 | 5.362 | 24.8 | 0.2002 | −2.367 |
| 6 | 1.833 | 1.89 | 19.13 | 27.25 | −6.367 | −0.363 |
| Parameter | Symbol | Value |
|---|---|---|
| Thigh mass | m1 | 1.02 kg |
| Calf mass | m2 | 2.36 kg |
| Thigh length | l1 | 460 mm |
| Calf length | l2 | 430 mm |
| Thigh mass center to hip joint length | r1 | 360 mm |
| Calf mass center to knee joint length | r2 | 165 mm |
| Moment of inertia of thigh | I1 | 0.356 kg·m2 |
| Calf moment of inertia | I2 | 0.078 kg·m2 |
| Current /A | Parameter Value | ||||
|---|---|---|---|---|---|
| Fm | a | k | C0 | f0 | |
| 0 | 1.63 | 0.30 | −0.42 | 0.32 | −0.13 |
| 0.4 | 26.75 | 0.31 | −0.47 | 0.36 | −0.89 |
| 0.8 | 50.48 | 0.39 | −0.45 | 0.35 | −1.23 |
| 1.2 | 80.56 | 0.31 | −0.50 | 0.31 | −3.13 |
| 1.6 | 100.09 | 0.37 | −0.43 | 0.34 | −4.24 |
| 2.0 | 115.96 | 0.25 | −0.55 | 0.31 | −5.94 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, Q.; Zhao, J.; Mei, X.; Yi, F.; Hu, G. Design and Trajectory Tracking Control of a Magnetorheological Prosthetic Knee Joint. Appl. Sci. 2021, 11, 8305. https://doi.org/10.3390/app11188305
Zuo Q, Zhao J, Mei X, Yi F, Hu G. Design and Trajectory Tracking Control of a Magnetorheological Prosthetic Knee Joint. Applied Sciences. 2021; 11(18):8305. https://doi.org/10.3390/app11188305
Chicago/Turabian StyleZuo, Qiang, Jinpeng Zhao, Xin Mei, Feng Yi, and Guoliang Hu. 2021. "Design and Trajectory Tracking Control of a Magnetorheological Prosthetic Knee Joint" Applied Sciences 11, no. 18: 8305. https://doi.org/10.3390/app11188305
APA StyleZuo, Q., Zhao, J., Mei, X., Yi, F., & Hu, G. (2021). Design and Trajectory Tracking Control of a Magnetorheological Prosthetic Knee Joint. Applied Sciences, 11(18), 8305. https://doi.org/10.3390/app11188305