
Online Control for Biped Robot with Incremental Learning Mechanism


Abstract
:1. Introduction
- As compared with the control scheme developed in [26], ours newly equips with a neural-network estimator and an incremental mechanism, with which those newly coming data can be used straightforwardly to update the original well-trained model in real time. This implies that it is possible for a robot to achieve better locomotion stability in dynamic environment, e.g., from flat ground to uneven terrain;
- Traditional optimization-based methods, such as those in [23,24,25,26] are involved in many adaption laws to be updated or computed online, which may result in a computation burden during control implementation. To remove this restriction, we achieve the fusion of the random vector functional-link neural network with an incremental mechanism, so that the entire retraining from beginning can be effectively avoided. Furthermore, by designing an interval type-2 fuzzy weight identifier (IT2FWI), both horizontal and vertical locomotion stabilities are successfully taken into account in training procedure.
| Algorithm 1 Online Updating with increment learning algorithm |
| Input: |
| incoming new samples ; |
| Output: |
| 1: Randomly initiate , , , , set training error ; |
| 2: Calculate the matrix ; |
| 3: Calculate with Equation (11); |
| 4: while; do |
| 5: Randomly initiate , ; |
| 6: Set and |
| 7: Calculate and by Equations (12)–(14); |
| 8: end while |
| 9: Calculate |
2. System Description and Some Preliminaries
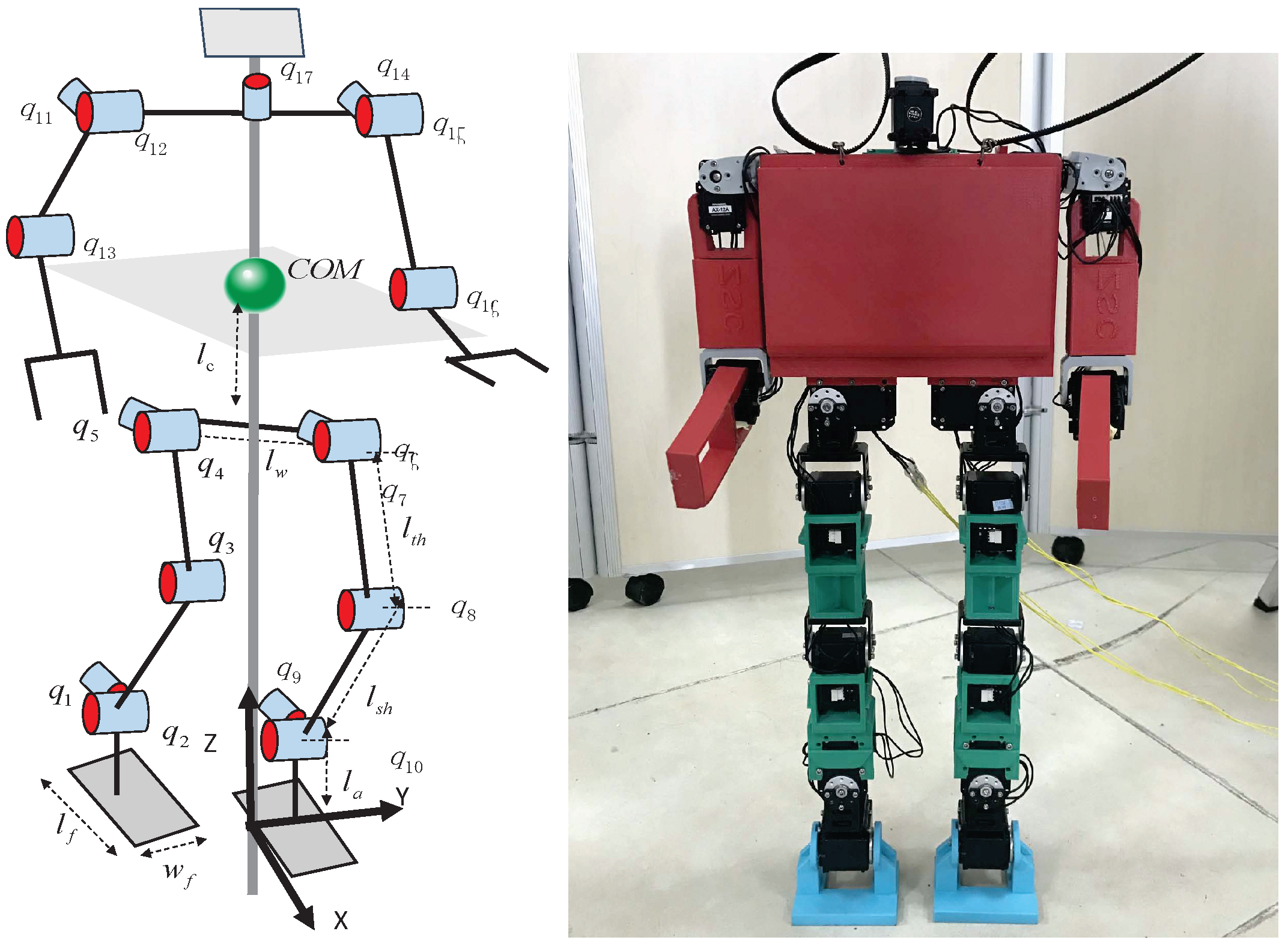
2.1. Overview of Biped Robot BRZ-4
2.2. Kinematics and Dynamics
2.3. Bipedal Locomotion Stability
3. Online Control System Design
3.1. Weighted Neural-Network Estimator
3.2. Incremental Learning Method Design
3.3. Interval Type-2 Fuzzy Identifier Design
4. Experiment Results and Analysis
4.1. Experiment: Walking on Flat Ground
4.2. Simulation: Climbing Stairs
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, L.; Liu, Z.; Zhang, Y. Energy-efficient yaw moment control for humanoid robot utilizing arms swings. Int. J. Precis. Eng. Manuf. 2016, 17, 1121–1128. [Google Scholar] [CrossRef]
- Yu, Z.; Zhou, Q.; Chen, X.; Li, Q.; Meng, L.; Zhang, W.; Huang, Q. Disturbance rejection for biped walking using zero-moment point variation based on body acceleration. IEEE Trans. Ind. Inform. 2018, 15, 2265–2276. [Google Scholar] [CrossRef]
- Kim, S.; Hirota, K.; Nozaki, T.; Murakami, T. Human motion analysis and its application to walking stabilization with COG and ZMP. IEEE Trans. Ind. Inform. 2018, 14, 5178–5186. [Google Scholar] [CrossRef]
- Kim, E.; Kim, T.; Kim, J.W. Three-dimensional modelling of a humanoid in three planes and a motion scheme of biped turning in standing. IET Control. Theory Appl. 2009, 3, 1155–1166. [Google Scholar] [CrossRef]
- Lai, X.; Zhang, A.; She, J.; Wu, M. Motion control of underactuated three-link gymnast robot based on combination of energy and posture. IET Control. Theory Appl. 2011, 5, 1484–1493. [Google Scholar] [CrossRef]
- Tamayo, A.J.M.; Bustamante, P.V.; Ramos, J.J.M.; Cobo, A.E. Inverse models and robust parametric-step neuro-control of a Humanoid Robot. Neurocomputing 2017, 233, 90–103. [Google Scholar]
- Winkler, A.W.; Farshidian, F.; Pardo, D.; Neunert, M.; Buchli, J. Fast trajectory optimization for legged robots using vertex-based zmp constraints. IEEE Robot. Autom. Lett. 2017, 2, 2201–2208. [Google Scholar] [CrossRef]
- Huan, T.T.; Van Kien, C.; Anh, H.P.H.; Nam, N.T. Adaptive gait generation for humanoid robot using evolutionary neural model optimized with modified differential evolution technique. Neurocomputing 2018, 320, 112–120. [Google Scholar] [CrossRef]
- Yan, L.; Zhen, T.; Kong, J.L.; Wang, L.M.; Zhou, X.L. Walking Gait Phase Detection Based on Acceleration Signals Using Voting-Weighted Integrated Neural Network. Complexity 2020, 2020, 4760297. [Google Scholar] [CrossRef]
- Kuindersma, S.; Deits, R.; Fallon, M.; Valenzuela, A.; Dai, H.; Permenter, F.; Koolen, T.; Marion, P.; Tedrake, R. Optimization-based locomotion planning, estimation, and control design for the atlas humanoid robot. Auton. Robot. 2016, 40, 429–455. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, J.; Zhong, J. Skill Learning for Intelligent Robot by Perception-Action Integration: A View from Hierarchical Temporal Memory. Complexity 2017, 2017, 7948684. [Google Scholar] [CrossRef] [Green Version]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Harada, K.; Yokoi, K.; Hirukawa, H. Biped walking pattern generation by using preview control of zero-moment point. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 2, pp. 1620–1626. [Google Scholar]
- Lee, B.J.; Stonier, D.; Kim, Y.D.; Yoo, J.K.; Kim, J.H. Modifiable Walking Pattern of a Humanoid Robot by Using Allowable ZMP Variation. IEEE Trans. Robot. 2008, 24, 917–925. [Google Scholar] [CrossRef]
- Shin, H.K.; Kim, B.K. Energy-Efficient Gait Planning and Control for Biped Robots Utilizing the Allowable ZMP Region. IEEE Trans. Robot. 2014, 30, 986–993. [Google Scholar] [CrossRef]
- Caron, S.; Pham, Q.C.; Nakamura, Y. Zmp support areas for multicontact mobility under frictional constraints. IEEE Trans. Robot. 2017, 33, 67–80. [Google Scholar] [CrossRef] [Green Version]
- Hirabayashi, T.; Ugurlu, B.; Kawamura, A.; Zhu, C. Yaw moment compensation of biped fast walking using 3D inverted pendulum. In Proceedings of the 10th IEEE International Workshop on Advanced Motion Control, Trento, Italy, 26–28 March 2008; pp. 296–300. [Google Scholar]
- Park, J. Synthesis of natural arm swing motion in human bipedal walking. J. Biomech. 2008, 41, 1417–1426. [Google Scholar] [CrossRef]
- Xing, D.; Su, J. Arm/trunk motion generation for humanoid robot. Sci. China Inf. Sci. 2010, 53, 1603–1612. [Google Scholar] [CrossRef]
- Ugurlu, B.; Saglia, J.A.; Tsagarakis, N.G.; Caldwell, D.G. Yaw moment compensation for bipedal robots via intrinsic angular momentum constraint. Int. J. Humanoid Robot. 2012, 9, 1250033. [Google Scholar] [CrossRef]
- Fu, G.; Chen, J.; Yang, Y. A yaw moment counteracting method for humanoid robot based on arms swinging. Jiqiren (Robot) 2012, 34, 498–504. [Google Scholar] [CrossRef]
- Yang, L.; Fu, Y.; He, H. A Yaw Moment Control Method for Humanoid Robot Based on Leg Joints Control. Control. Decis. 2016, 31, 79–83. [Google Scholar]
- Yu, W.; Bao, G.; Wang, Z.; Wu, W. fast walking pattern generation for humanoid robot using waist joint moment. Jiqiren (Robot) 2010, 32, 219–225. [Google Scholar]
- Hu, L.; Zhou, C.; Sun, Z. Estimating biped gait using spline-based probability distribution function with Q-learning. IEEE Trans. Ind. Electron. 2008, 55, 1444–1452. [Google Scholar]
- Erbatur, K.; Kurt, O. Natural ZMP trajectories for biped robot reference generation. IEEE Trans. Ind. Electron. 2009, 56, 835–845. [Google Scholar] [CrossRef] [Green Version]
- Tao, G. Online Regulation of the Walking Speed of a Planar Limit Cycle Walker via Model Predictive Control. IEEE Trans. Ind. Electron. 2013, 61, 2326–2333. [Google Scholar]
- Wang, L.; Liu, Z.; Chen, C.L.P.; Zhang, Y.; Lee, S.; Chen, X. Energy-efficient SVM learning control system for biped walking robots. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 831–837. [Google Scholar] [CrossRef]
- Yang, L.; Deng, C. Yaw Moment Compensation for Humanoid Robot via Arms Swinging. Open Autom. Control. Syst. J. 2014, 6, 1371–1377. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Liu, Z.; Zhang, Y. Online walking control system for biped robot with optimized learning mechanism: An experimental study. Nonlinear Dyn. 2016, 86, 2035–2047. [Google Scholar] [CrossRef]
- Chen, C.; Liu, Z. Broad Learning System: An Effective and Efficient Incremental Learning System Without the Need for Deep Architecture. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 10–24. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Wang, Y. A Type-2 Fuzzy Switching Control System for Biped Robots. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1202–1213. [Google Scholar] [CrossRef]
- Bessonnet, G.; Seguin, P.; Sardain, P. A parametric optimization approach to walking pattern synthesis. Int. J. Robot. Res. 2005, 24, 523–536. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | Trunk | Thigh | Shank | Arm | Foot | |
|---|---|---|---|---|---|---|
| BRZ-4 | Length (cm) | 20 | 17.5 | 15.5 | 24.7 | 5 |
| Mass (kg) | 1.05 | 0.256 | 0.156 | 0.156 | 0.075 |
| Proposed Method | Method in [26] | |
|---|---|---|
| RMS error () | 0.0322 | 0.0341 |
| RMS error () | 0.0251 | 0.0276 |
| RMS error () | 0.0617 | 0.0745 |
| Learning time of each cycle (s) | 0.23 | 1.56 |
| Link | Trunk | Thigh | Shank | Foot | |
|---|---|---|---|---|---|
| BRZ-5 | Length (cm) | 38.3 | 37.1 | 35.0 | 11.0 |
| Mass (kg) | 1.38 | 3.58 | 2.18 | 1.048 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Lai, G.; Chen, Y.; Guo, Z. Online Control for Biped Robot with Incremental Learning Mechanism. Appl. Sci. 2021, 11, 8599. https://doi.org/10.3390/app11188599
Yang L, Lai G, Chen Y, Guo Z. Online Control for Biped Robot with Incremental Learning Mechanism. Applied Sciences. 2021; 11(18):8599. https://doi.org/10.3390/app11188599
Chicago/Turabian StyleYang, Liang, Guanyu Lai, Yong Chen, and Zhihui Guo. 2021. "Online Control for Biped Robot with Incremental Learning Mechanism" Applied Sciences 11, no. 18: 8599. https://doi.org/10.3390/app11188599