The BEV model for an L-7 vehicle and the methods developed for achieving estimations of the battery SoC variation and the residual driving range are presented within this section. Both battery SoC and residual range were estimated by relying upon previous battery power demand data acquired under real-world conditions. Since battery power demands can be considered as directly related to the vehicle’s velocity along a driving mission, the availability of experimental data was viewed as an important opportunity to include driver behaviour, road and traffic conditions simultaneously in the analyses.
2.1. Vehicle Model
A schematic representation of the BEV model developed for the present study is shown in
Figure 1. Vehicle velocity was used as the only input signal to compute the traction or braking power required for the vehicle. A backward-facing approach was therefore employed for the analyses in which the power demanded by the road is back-propagated throughout the driveline, starting from the wheels and reaching the battery. Consistently, with traction or braking (i.e., battery regeneration) events, energy was considered to be flowing out of (red arrow) or into (green arrow) the battery, respectively. Accordingly, the resistant forces (and powers) were defined for each powertrain component (i.e., wheels, frontal final drive, gearbox) until the motor/generator (MG). The latter was responsible for providing the vehicle with the proper propulsion through the front axle (i.e., driven axle). Finally, the electric power required by the MG was considered as the real power demand of the battery.
The resistant force
experienced by the vehicle can be calculated as the sum of rolling
, aerodynamic (i.e., air drag)
, inertia
and grade resistances
. The complete formula is:
where
is the vehicle mass,
is the gravitational acceleration,
is the rolling resistance coefficient,
is the road slope,
is the air density,
is the vehicle velocity,
is the vehicle frontal area,
is the drag coefficient and
is the vehicle acceleration. The apparent translating mass
is calculated as:
with
as the rolling radius,
representing the i-th rotating component in the vehicle (e.g., final drive), and
and
representing the inertia coefficient and the transmission ratio of the i-th rotating component, respectively. Once the resistant force is defined, the resistant power can be calculated as:
Moreover, the value of the resistant force can be used to estimate the different torque requests at any stage of the driveline, starting from the wheels turning in reverse to the MG. The torques at the wheels
, final drive
and gearbox
can be estimated as follows:
where
is wheel radius,
and
are the transmission ratio and the efficiency of the final drive, respectively, and
and
are the transmission ratio and the efficiency of the gearbox, respectively. Both the
and
depend upon the gearbox model involved in the study. In this paper, a continuously variable transmission (CVT) has been modelled and the transmission ratios were estimated as a function of the vehicle speed and resistant power. The actual values of the CVT transmission ratio were derived from signals recorded during the experimental driving missions. Specifically, starting from the vehicle speed and electric motor traces, the look-up table (LUT) shown in
Figure 2 was generated. Of note, the considered range for the transmission ratio was between 2 and 4.5.
The computation of the rotational speed at the wheels
, final drive
, gearbox
and motor
is important for the evaluation of the power requested by the MG and hence to the battery. The equations used for the estimation of the rotational speed along the driveline are:
Once
and
were evaluated, the motor torque
could be computed. In the present paper, a positive torque was considered as representative of traction phases, whereas a negative torque was considered as representative of braking phases. According to traction scenarios, the torque demand of the MG was considered to be equal to the torque at the gearbox level. On the other hand, a reduced MG torque demand was considered during braking conditions. In such cases, the negative torque request is split on the two axles. On the non-driven axle, the braking action is achieved only by the effect of mechanical brakes, whereas it is given by the electric motor working as a generator (i.e., regenerative braking operating mode) on the driven axle. Therefore, the required motor torque can be computed as:
where
is the percentage of weight on the driving axle. Hence, the mechanical power and the electric power can be evaluated as:
in which
represents the motor efficiency,
is the motor mechanical power and
is the motor electric power. The latter was calculated by multiplying or dividing the mechanical power by the motor efficiency according to braking or traction conditions, respectively. The motor efficiency was calculated according to a downscaled version of the efficiency map of a reference MG made for a passenger car application. The original map is shown in
Figure 3. The efficiency map allowed for evaluation of the losses at the motor level to be considered based upon its torque
and rotational speed
. The efficiency assumed positive values when in the range of −277 Nm and 370 Nm, whereas it was null outside this interval. The rotational speed was limited to 15,000 rpm.
The downscaling operation was performed according to a linear which started from the definition of a scaling factor
between the actual and the reference motors:
in which
and
represent the mechanical peak power of the downsized and the reference motors, respectively. Assuming the motor speed range to be constant, the motor torque can be defined as:
Finally, the motor mass and its inertia were re-calculated following the same approach. At the end of the downscaling procedure, the power and torque limit curves were obtained, as shown in
Figure 4. A distinction between peak and continuous MG outputs was involved in the study to include the effects of the BTMS control on the battery. In fact, a possible action of the BTMS is to reduce battery power after peak power/torque values have been demanded for a given amount of time. Such a condition is typically involved in the control of the BTMS for electrified vehicles to prevent overheating phenomena. To clarify, non-complex strategies are typically involved for cooling the battery pack of very light vehicles (e.g., L7). A common solution is to embed a passive air-cooling system. Nevertheless, given the target of this research, the authors have chosen to avoid such an assumption and include the possibility of the BTMS to cut the current and power of the electric sources.
Assuming that the power demanded to the MG can be delivered (i.e., the operating point falls within the working map), battery power can be computed by including the losses at the AC/DC converter level. The latter has been simply modelled as an additional efficiency to be multiplied or divided during braking or traction phases, respectively. The formula is:
in which,
represents the efficiency of the AC/DC converter. This value was assumed constant despite the traction or braking phases.
Once the assessment of the power required by the battery was performed, the battery SoC variation and residual driving range could be estimated.
2.2. Battery Model and Estimation of the Battery State of Charge
In terms of the battery model, [
24] stated that a low-throughput battery model can represent the best trade-off between the accuracy of the model and the computational effort required for the simulations. Given the aim of the present paper, consisting of the assessment of the driving range of an L-7 BEV, such a low-throughput model was used in the analyses.
In
Figure 5 and
Figure 6, the curves of the open-circuit voltage (OCV)
and the equivalent resistance
considered for the battery cells are presented, respectively. The curves are considered as a function of the battery SoC.
In particular, the OCV increased with the battery SoC, whereas the equivalent resistance showed a significant drop for low SoC values and plateaued for SoC higher than 20–30%. The battery features are reported in
Table 1 and refer to a valve-regulated lead-acid (VRLA) battery. To clarify, a VRLA battery was considered in the study only because of data availability. Nevertheless, the entire methodology would not be affected by a change in the battery model (e.g., Li-Ion or others) and could easily be adapted.
In terms of the battery pack architecture, a single module constituted by six parallel units (
) was considered in the analyses. Each battery unit was assumed to be constituted by six cells in series. The battery current
can be assessed along with the information of the electric power demand
:
in which
and
represent the OCV and internal resistance of the battery, respectively, based on the battery architecture considered in the present study. The maximum value of the battery current
was set to 200
and included in the model. This value was considered constant for any traction phase, while a saturation was analysed during braking conditions. Since relevant power might flow into the system due to impressive regenerative braking phases, the possibility of cutting the maximum current at the AC/DC converter might be necessary to avoid harmful events in the battery. Accordingly, several levels of the maximum recharging current (saturation current,
) were considered in the following analyses and an assessment of the effects on the overall battery SoC trajectory was carried out over experimental driving missions. To clarify, the efficiency of the AC/DC converter
was considered as a constant value despite different values of the saturation current.
Hence, the maximum power that can be provided by the battery during traction phases can be computed by identifying the minimum value between the two following power contributions:
For details about the distinction between the battery power expressed through (16) and (17), please refer to [
24]. Alternatively, the maximum power admitted by the battery during braking phases can be estimated as:
in which
is equal to
during braking events. Once the current requested by the battery is estimated, the variation of the battery SoC can be calculated as:
in which
represents the SoC at the time instant of the calculation and
the battery capacity.
The definition of a more realistic approach that was used for the estimation of the battery SoC variations, is reported in the following section.
2.3. Estimation of the Residual Driving Range for a Battery Electric Vehicle
Of all the different methods for the estimation of SoC [
12], the ECC approach was chosen.
In classic coulomb counting method (CC), battery capacity is considered as a constant value, therefore the influence of any battery operating condition on its available capacity is neglected [
7]. Conversely, according to the ECC approach, multiple correction factors must be included when estimating the real battery capacity, such as the temperature and aging of the battery pack. The additional features we considered for the application of the ECC were:
A higher accuracy with respect to the reference approach [
13];
A low computational burden [
25];
The lack of parameters to be tuned [
12].
Thereby, relying upon the ECC approach, a more precise estimation of the battery SoC variation can be made according to the following equation:
where
represents the charge consumed,
is an overall correction factor constituted by the product of a correction factor related to the battery pack temperature
, and a correction factor that considers the battery SoH
. Equation (22) shows a different formulation with respect to (21), as a given set of additional parameters must be estimated. To achieve this, the two correction factors were estimated based on the relative variation of the available battery capacity with respect to the battery capacity nominal value (100%). The data were processed according to the technical specifications of the L-7 BEV considered within the STEVE project [
23], and two different LUTs were generated.
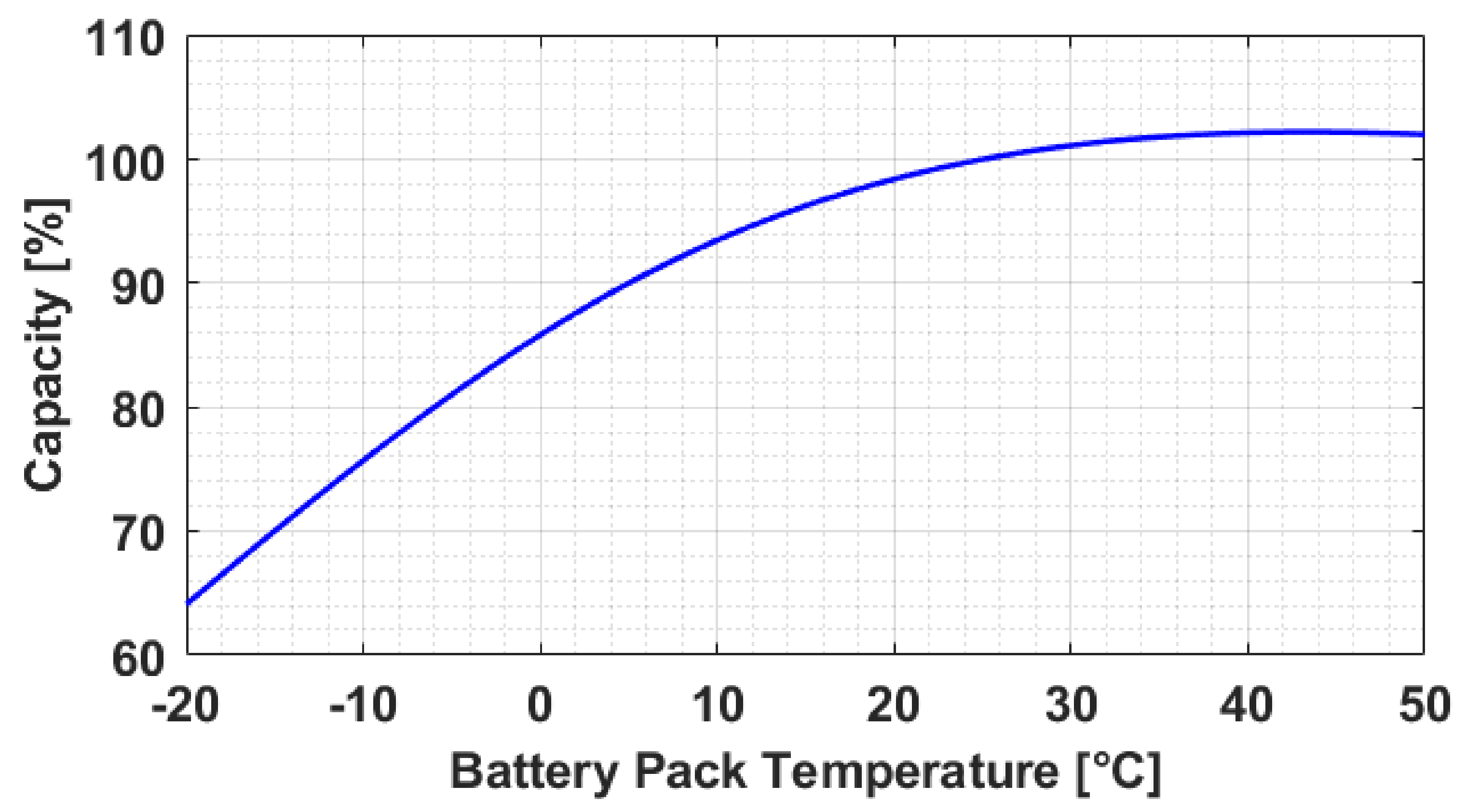
In terms of the correction factor for the battery pack temperature, the trend of the battery capacity as a function of the battery pack temperature is reported in
Figure 7. A particular phenomenon was highlighted by temperatures over 25 °C as the battery capacity tended to overcome the nominal value. Nevertheless, high battery pack temperatures were typically responsible for producing faster aging and a drastic reduction in battery performance. More precisely, a reduction in the battery internal resistance and a higher frequency of over-discharging phenomena occurred, as shown in [
26]. However, allowing the battery to work at any temperature level did not represent a beneficial solution.
The fluctuations of battery capacity due to a variation of the battery pack temperature was considered through the value in the range (0.64, 1.03).
With regard to the correction factor accounting for the reduction in battery capacity due to its SoH, the trend shown in
Figure 8 was considered for the analyses. To clarify, a life-cycle was considered as a complete discharge until the DoD was reached, followed by a complete recharge of the battery. It can be noted that a significant effect on the available capacity was produced by a change in the DoD. In fact, increasing the DoD can lead to an increase in the driving range of the vehicle but also to a reduction of the maximum life-cycles admitted. Specifically for the data shown in
Figure 8, a DoD equal to 80% could allow the battery to improve the life cycles by 50%, increasing from 400 (with DoD equal to 100%) to 600 life-cycles. This value was selected on the assumption that it could represent the best trade-off between battery usage (i.e., battery longevity) and electric range.
Accordingly, two distinct scenarios were analysed in the present paper regarding
: within the first scenario, the maximum DoD admitted was set to 100%; in the second scenario, the maximum DoD admitted was reduced to 80%. Within the two different scenarios, the reduction in battery capacity over time differs, as shown in
Figure 9. According to the data extracted from [
26,
27], battery capacity showed a nearly flat trend in the case of DoD80 (blue curve), whereas a steeper reduction was observed for DoD100 (red curve), as the termination condition was found at 400 cycles. In the case of DoD100, a peak occurred in the early stages of battery life, and was related to over-discharging phenomena which were responsible for a very fast capacity fading (i.e., roughly −20% in 200 cycles). To clarify, the termination of both curves was correlated to the number of cycles at which 20% of the battery capacity was depleted.
Using the same approach as for , the values of were considered in the range (0.8, 1).
Once the available capacity of the battery was determined, a correct evaluation of the battery SoC was performed by producing a good estimation of the current flowing into the battery (see Equation (20)). To achieve this, the power required by the road (i.e., the traction/braking power) must be coupled with any further power demand. For a BEV, auxiliary loads assume a relevant role and therefore their inclusion in the model is needed [
12]. Specifically, the larger amount of auxiliary power can be referred to cabin heating and cooling operations (i.e., HVAC). Within the present model, a reversible vapor compressor–heat pump (VC–HP) layout was considered as the vehicle’s HVAC system. This choice was made due to the higher reliability shown by the VC–HP relative to other systems (e.g., evaporative cooling integrated thermal management) [
28], which has increasingly spread throughout the automotive market [
29]. According to the R32 coolant [
29] and based upon the model suggested in [
30], the curve shown in
Figure 10 was built considering HVAC power consumption
as a function of the ambient temperature, assuming the optimal cabin temperature is 24 °C (
). The model equations are:
As highlighted in
Figure 10, power consumption has always been considered as a positive value. A baseline of 50 W was used to account for the fans’ load. Moreover, human metabolic heat was taken into account, given the relatively small volume of an L-7 quadricycle cabin. The formulation of the metabolic power is:
in which
is the metabolic power,
is the metabolic rate and
is the body surface area. To clarify, a fixed BSA based on the European average value (1.73 m
2) [
31] was considered whereas two different metabolic rates accounted for the driver and the passenger (85 W/m
2 for the driver and 55 W/m
2 for each passenger) [
32]. The heat produced by human bodies was added when the system was under cooling conditions, whereas it was subtracted under heating mode. No other thermal loads were considered in the study (e.g., sun irradiation) since they represent a minor impact on overall HVAC consumption [
30]. As a final contribution, the sum of the loads coming from any other vehicle auxiliary (e.g., headlights, electric wipers, electric power window, etc.) was fixed at 200 W.
Once
had been calculated, the Equivalent Battery Voltage (EBV) [
25] can be defined according to the following equation:
where
,
while
and
are the initial and final time steps of the driving mission, respectively. According to (25), the EBV refers to the entire driving mission. The energy consumption of the vehicle
over the mission can be calculated as follows:
According to [
25], the electric vehicle energy index is computed as:
in which
represents the number of kilometers that could be travelled by the vehicle with an energy consumption of 1 kWh. Finally, the BEV residual range can be estimated as:
in which
is the battery available capacity estimated through:
where
is the initial value of the battery SoC for a given driving mission. According to this procedure, a more precise evaluation of both
(including the power demanded by the auxiliaries) and
(considering thermal conditions and battery ageing) can be performed and, hence, a more reliable estimation of the real residual driving range can be obtained.









































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}