Grey Wolf and Weighted Whale Algorithm Optimized IT2 Fuzzy Sliding Mode Backstepping Control with Fractional-Order Command Filter for a Nonlinear Dynamic System


Abstract
:1. Introduction
2. Materials and Methods
2.1. Dynamic Equaiton of a Nonlinear MIMO System
2.2. Fractional-Order Calculus
2.3. Function Approximation Using IT2 Fuzzy Logic Systems
2.4. Controller Design
2.5. Stability Analysis
2.6. Hybrid Optimization of Grey Wolf and Weighted Whale Algorithm
3. Results and Discussion
3.1. GWO-WWOA Learning Process
| Algorithm 1 GWO-WWOA |
| 1: Initialize the grey wolf and whale population |
| 2: |
| 3: Initialize a, A, and C |
| 4: Calculate the fitness of each search agent |
| 5: = the best search agent of whale |
| 6: = the second-best search agent of grey wolf |
| 7: = the third-best search agent of grey wolf |
| 8: while (t < Max number of epoch) do |
| 9: for each search agent |
| 10: Update a, A, and C |
| 11: Update the position of the current search agent by above equations |
| 12: Calculate the fitness of all search agents |
| 13: fitness = simulation-simulink-script-file |
| 14: Update , , and |
| 15: |
| 16: end while |
| 17: return and |
| Algorithm 2 simulation-simulink-script-file code |
| 1: function [fitness] = simulation-simulink-script- file(u) |
| 2: = u(1)… |
| 3: simopt = simset‘(‘solver’,’ode5’,’SrcWorkspace’,’Current’,…‘DstWorkspace’,‘Current’); |
| 4: out = sim(‘Simulink_file_name’,[t0,tf], simopt); |
| 5: return fitness |
| 6: end |
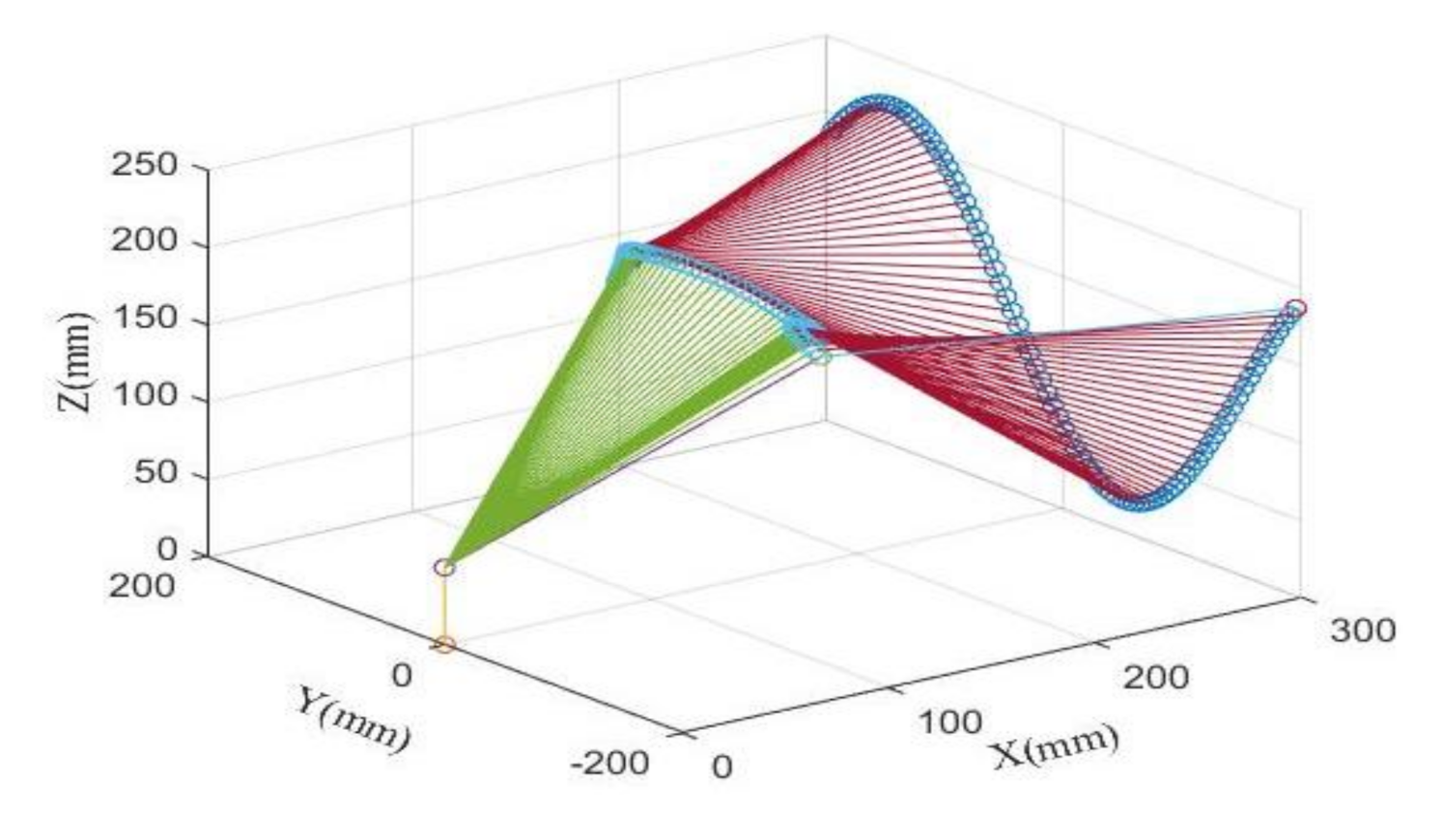
3.2. Simulation Results of the End Effector Positioning
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviation
| BSC, FLS, DSC | backstepping control, fuzzy logic system, dynamic surface control |
| SMC, IT2 | sliding mode control, interval type-2 |
| ACO, PSO | ant colony optimization, particle swarm optimization |
| GWO,WOA | grey wolf optimization, whale optimization algorithm |
| WWOA | weighted whale optimization algorithm |
| ITAE | integral time absolute error |
| FSBSC | fractional-order sliding mode backstepping control |
| fractional-order constants | |
| approximated function, approximation error | |
| tracking error, command filtering error | |
| command filter state varibale, virtual control input | |
| state variable, sliding mode surface | |
| uncertainty, external disturbance, lumped disturbance | |
| gains of command filter | |
| gains of sliding mode surface |
References
- Kristic, M.; Kanellakopoulos, I.; Kokotovic, P.V. Nonlinear and Adaptive Control Design; Wiley: New York, NY, USA, 1995. [Google Scholar]
- Fang, Y.; Fei, J.; Yang, Y. Adaptive backstepping desoign of a microgyroscope. Micromachines 2018, 9, 338. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, X.; Zhu, Z.C.; Rui, G.C.; Cheng, D.; Shen, G.; Tang, Y. Force loading tracking control of an electro-hydraulic actuator based on a nonlinear adaptive fuzzy backstepping control scheme. Symmetry 2018, 10, 155. [Google Scholar] [CrossRef] [Green Version]
- Tran, D.T.; Nguyen, M.N.; Ahn, K.K. RBF neural network based backstepping control for an eletrcohydraulic elastic manipulator. Appl. Sci. 2019, 9, 2237. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.H. A rectified reiterative sieved-pollaczek polynomials neural network backstepping control with improved fish school search for motor drive system. Mathematics 2020, 8, 1699. [Google Scholar] [CrossRef]
- Swaroop, S.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef] [Green Version]
- Han, S.I. Partial tracking error constrained fuzzy dynamic surface control for a strict feedback nonlinear dynamic system. IEEE Trans. Fuzzy Syst. 2014, 22, 1049–1061. [Google Scholar] [CrossRef]
- Guo, Q.; Liu, Y.; Jiang, D.; Wang, Q.; Xiong, W.; Liu, J.; Li, X. Prescribed performance constraint regulation of electrohydraulic control based on backstepping with dynamic surface. Appl. Sci. 2018, 8, 76. [Google Scholar] [CrossRef] [Green Version]
- Ma, H.; Liang, H.; Zhou, Q.; Ahn, C.K. Adaptive neural network dynamic surface control of strict-feedback nonlinear systems with full state constraints and unmodeled dynamics. IEEE Trans. Syst. Man Cyber Syst. 2019, 49, 506–515. [Google Scholar] [CrossRef]
- Li, Y.; Li, K.; Tong, S. Finite-time adaptive fuzzy output feedback dynamic surface control for MIMO nonstrict feedback systems. IEEE Trans. Fuzzy Syst. 2019, 27, 96–110. [Google Scholar] [CrossRef]
- Yu, J.; Shi, P.; Zhao, L. Finite-time command filter backstepping control for a class of nonlinear systems. Automatica 2018, 92, 173–180. [Google Scholar] [CrossRef]
- Zhang, J.; Xia, J.; Sun, W.; Wang, Z.; Shen, H. Command filter-based finite-time adaptive fuzzy control for nonlinear systems with uncertain disturbance. J. Frankl. Inst. 2019, 356, 11270–11284. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Ma, C.; Hori, Y. Fractional-order control: Theory and applications in motion control [Past and Present]. IEEE Ind. Electron. Mag. 2007, 1, 6–16. [Google Scholar] [CrossRef]
- Padula, F.; Visioli, A. Tuning rules for optimal PID and fractional-order PID controllers. J. Process. Control 2011, 21, 69–81. [Google Scholar] [CrossRef]
- Bandyopadhyay, B.; Kamal, S. Stabilization and Control of Fractional Order Systems: A Sliding Mode Approach; Springer: Berlin/Heidelberg, Germany, 2015; Volume 317. [Google Scholar]
- Aghababa, M.P. Design of a chatter-free terminal sliding mode controller for nonlinear fractional-order dynamical system. Int. J. Control 2013, 86, 1744–1756. [Google Scholar] [CrossRef]
- Yaoyao, W.; Surong, J.; Bai, C.; Hongtao, W. A new continuous fractional-order nonsingular terminal sliding mode control for cable-driven manipulator. Adv. Eng. Softw. 2018, 119, 21–29. [Google Scholar]
- Gong, P.; Lan, W. Adaptive robust tracking control for multiple unknown fractional-order nonlinear systems. IEEE Trans. Cybern. 2019, 49, 1365–1376. [Google Scholar] [CrossRef] [PubMed]
- Slotine, J.J.; Li, W. Applied Nonlinear Control; Prentice-Hall: New York, NY, USA, 1991. [Google Scholar]
- Lin, C.Y.; Jheng, H.W. Active vibration suppression of a motor-driven piezoelectric smart structure using adaptive fuzzy sliding mode control and repetitive control. Appl. Sci. 2017, 7, 240. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.; Song, A.; Cao, Y. An extended proxy-based sliding mode control of pneumatic muscle actuators. Appl. Sci. 2019, 9, 1571. [Google Scholar] [CrossRef] [Green Version]
- Mendal, J.M.; John, R.I.; Liu, F. Interval type-2 fuzzy logic systems made simple. IEEE Trans. Fuzzy Syst. 2006, 14, 808–821. [Google Scholar] [CrossRef] [Green Version]
- Mohadeszadeh, M.; Helavari, H. Synchronization of uncertain fractional-order hyperchaotic systems via a novel adaptive interval type-2 fuzzy active sliding mode controller. Int. J. Dyn. Control 2017, 5, 135–144. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, Q. Admissibility analysis for interval type-2 fuzzy descriptor systems based on sliding mode control. IEEE Trans. Cybern. 2019, 49, 3032–3040. [Google Scholar] [CrossRef] [PubMed]
- Bernal, E.; Castillo, O.; Soria, J.; Valdez, F. Optimization of fuzzy controller using galactic swarm optimization with type-2 fuzzy dynamic parameter adjustment. Axioms 2019, 8, 26. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Zhang, D.; Hu, J.; Lennox, B.; Arvin, F. Hysteresis modelling and feedforward control of piezoelectric actuator based on simlified interval type-2 fuzzy system. Sensors 2020, 20, 2587. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Sadati, N.; Zamani, I. H∞ disturbance attenuation of fuzzy large-scale systems. In Proceedings of the 2011 IEEE International Conference on Fuzzy Systems, Taipei, Taiwan, 27–30 June 2011; pp. 2364–2368. [Google Scholar]
- Liang, Z.; Li, Y.; Xu, L. Grain sieve loss fuzzy control system in rice combine harvesters. Appl. Sci. 2019, 9, 114. [Google Scholar] [CrossRef] [Green Version]
- Dorigo, M.; Blum, C. Ant colony optimization: A survey. Theor. Comput. Sci. 2005, 344, 243–278. [Google Scholar] [CrossRef]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization: An overview. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Oliveira, J.; Oliveira, P.M.; Boaventura-Cunha, J.; Pinho, T. Chaos-based grey wolf optimizer for higher order sliding mode position control of a robotic manipulator. Nonlinear Dyn. 2017, 90, 1353–1362. [Google Scholar] [CrossRef]
- Obadina, O.O.; Thaha, M.; Althoefer, K.; Shaheed, M.H. A modified computed torque control approach for a master-slave robot manipulator system. In Proceedings of the Annual Conference Towards Automation Robotic Systems, Bristol, UK, 25–27 July 2018; pp. 28–39. [Google Scholar]
- Zhou, Z.; Wang, C.; Zhu, Z.; Wang, Y.; Yang, D. Sliding mode control based on a hybrid grey-wolf-optimized extreme earning machine for robot manipulators. Int. J. Light Electron. Opt. 2019, 185, 364–380. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Ghahremani-Nahr, J.; Kian, R.; Sabet, E. A robust fuzzy methematical programming model for the closed-loop suppy chain network design and a whale optimization solution algorithm. Expert Syst. Appl. 2019, 116, 454–471. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Wang, W.; Tong, S.; Liu, Y. Robust adaptive tracking control for nonlinear systems based on bounds of fuzzy approximation parameters. IEEE Trans. Fuzzy Syst. 2010, 40, 170–184. [Google Scholar] [CrossRef]
- Wu, D.; Mendel, J.M. Enhanced Karnik-Mendel algorithms. IEEE Trans. Fuzzy Syst. 2009, 17, 923–934. [Google Scholar]
- Wang, L. Adaptive Fuzzy Systems and Control: Design and Stablility Analysis; Prentice-Hall: Englewood Cliffs, NJ, USA, 1994. [Google Scholar]
- Levant, A. Robust exact differentiation via sliding mode technique. Automatica 1998, 34, 379–384. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output- feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. A Lyapunov approach to second-order sliding mode controllers and observers. In Proceedings of the 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 2856–2861. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | Optimized Values |
|---|---|
| Joint 1 | |
| Joint 2 | |
| Joint 3 |
| Joint | Optimized Values of Each Parameter |
|---|---|
| Joint 1 | |
| Joint 2 | |
| Joint 3 |
| Technique | Joint 1 | Joint 2 | Joint 3 |
|---|---|---|---|
| WOA | 0.035 (100%) | 0.0063 (100%) | 0.020 (100%) |
| GWO | 0.025 (71%) | 0.0029 (46%) | 0.018 (90%) |
| GWO-WOA | 0.020 (57%) | 0.0028 (44%) | 0.017 (85%) |
| GWO-WWOA | 0.017 (49%) | 0.25 (40%) | 0.011 (55%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S. Grey Wolf and Weighted Whale Algorithm Optimized IT2 Fuzzy Sliding Mode Backstepping Control with Fractional-Order Command Filter for a Nonlinear Dynamic System. Appl. Sci. 2021, 11, 489. https://doi.org/10.3390/app11020489
Han S. Grey Wolf and Weighted Whale Algorithm Optimized IT2 Fuzzy Sliding Mode Backstepping Control with Fractional-Order Command Filter for a Nonlinear Dynamic System. Applied Sciences. 2021; 11(2):489. https://doi.org/10.3390/app11020489
Chicago/Turabian StyleHan, Seongik. 2021. "Grey Wolf and Weighted Whale Algorithm Optimized IT2 Fuzzy Sliding Mode Backstepping Control with Fractional-Order Command Filter for a Nonlinear Dynamic System" Applied Sciences 11, no. 2: 489. https://doi.org/10.3390/app11020489