
Hardware-in-the-Loop Test of a Prosthetic Foot


Abstract
:1. Introduction
2. State-of-the-Art
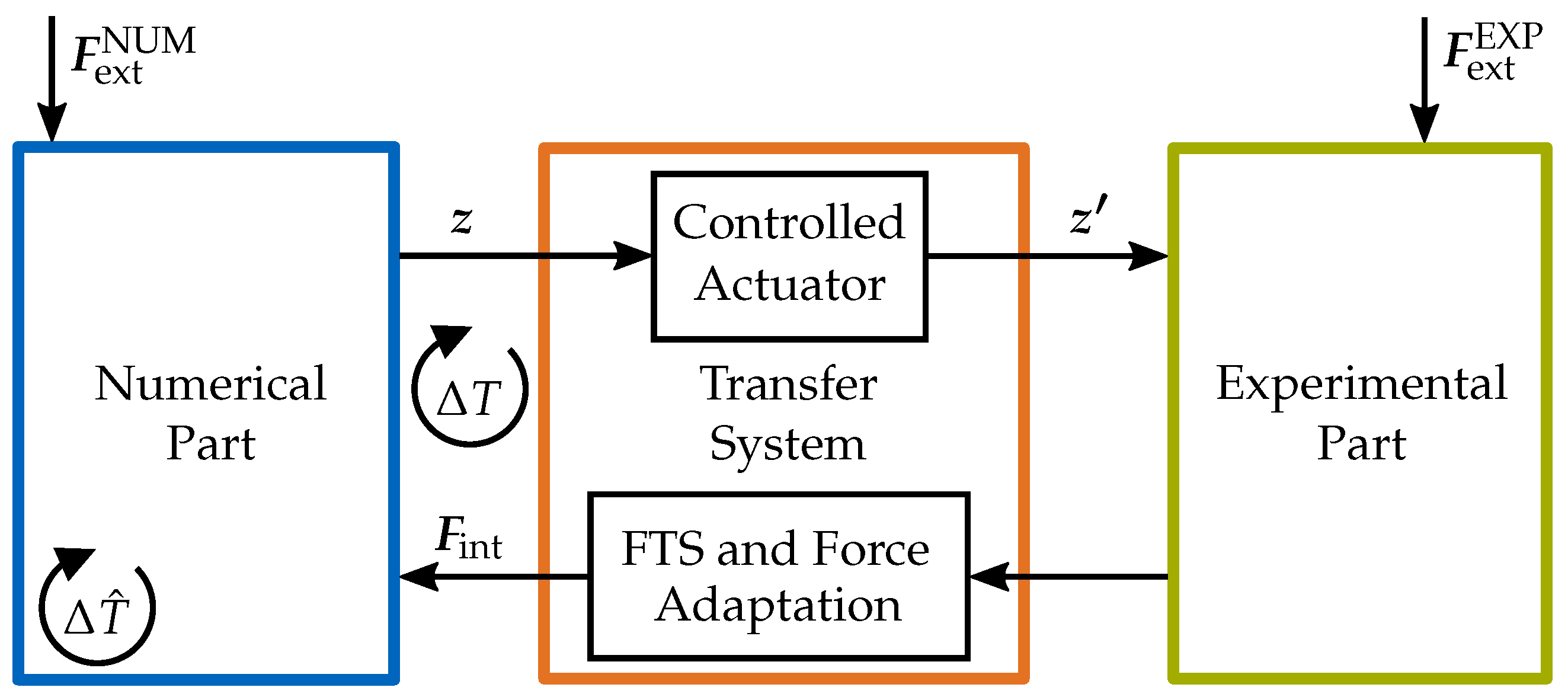
2.1. Fundamentals of Hardware-in-the-Loop
2.2. Basic Human Gait Models
3. Experimental Setup and Parameters
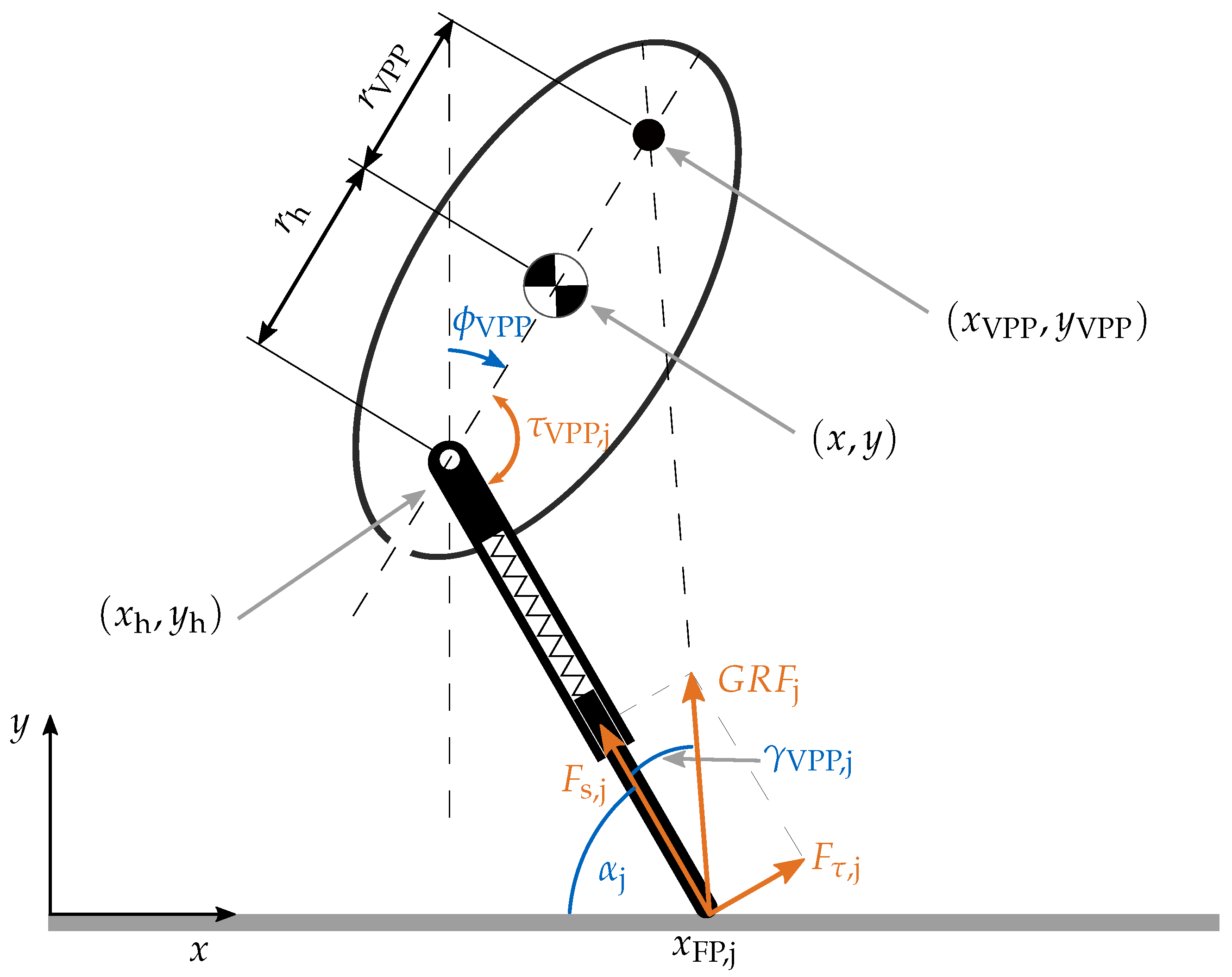
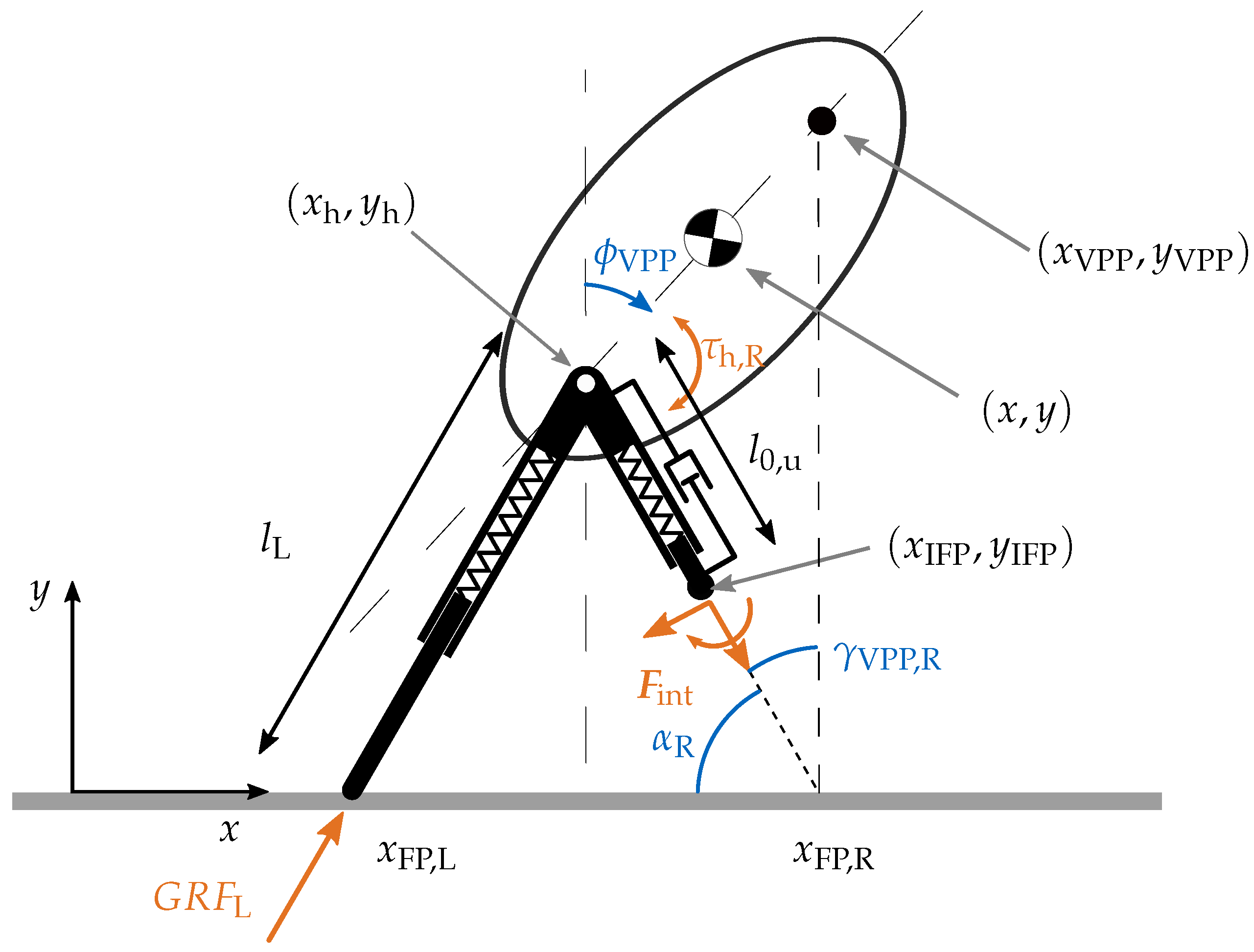
3.1. Modeling an Amputee Using the VPP Model
3.1.1. Model of the Amputated Leg
3.1.2. Center of Pressure Shift
3.1.3. Equations of Motion
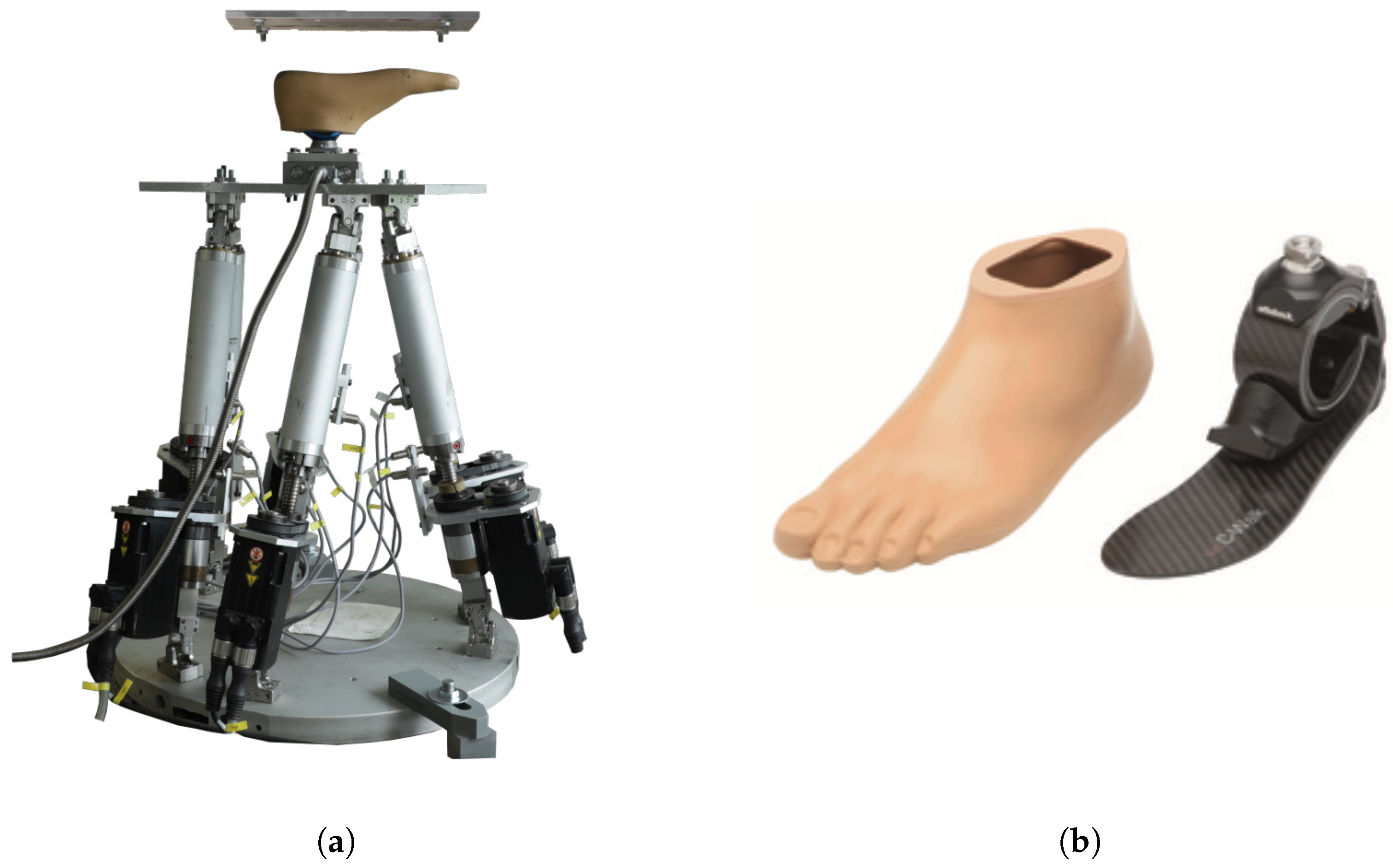
3.2. Transfer System
3.3. Experimental Part
3.4. Parameters
4. Experimental Results
4.1. Results of One Gait Cycle
4.2. Discussion
5. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CoM | Center of Mass |
| CoP | Center of Pressure |
| DoF | Degree of Freedom |
| DSP | Digital Signal Processor |
| EoMs | Equations of Motion |
| FP | Foot Point |
| FTS | Force–Torque Sensor |
| GC | Gait Cycle |
| GRF | Ground Reaction Force |
| HiL | Hardware-in-the-Loop |
| IFP | Interface Point |
| SLIP | Spring-Loaded Inverted Pendulum |
| TD | Touch Down |
| TO | Take Off |
| VP | Virtual Pendulum |
| VPP | Virtual Pivot Point |
Appendix A. Equations to Evaluate the VPP Model
Appendix B. Principle of Angular Momentum in the VPP Model
References
- Tryggvason, H.; Starker, F.; Lecompte, C.; Jónsdóttir, F. Modeling and simulation in the design process of a prosthetic foot. In Proceedings of the 58th Conference on Simulation and Modelling (SIMS 58), Reykjavik, Iceland, 25–27 September 2017; Linköping Electronic Conference Proceedings. Linköping University Electronic Press: Linköping, Sweden, 2017; pp. 398–405. [Google Scholar] [CrossRef] [Green Version]
- Kwon, S.; Park, J. Kinesiology-Based Robot Foot Design for Human-Like Walking. Int. J. Adv. Robot. Syst. 2012, 9, 259. [Google Scholar] [CrossRef] [Green Version]
- Murphy, D. 20—Gait Deviations after Limb Loss. In Fundamentals of Amputation Care and Prosthetics; Demos Medical Publishing: New York, NY, USA, 2013. [Google Scholar]
- Gailey, R.; Allen, K.; Castles, J.; Kucharik, J.; Roeder, M. Review of secondary physical conditions associated with lower-limb amputation and long-term prosthesis use. J. Rehabil. Res. Dev. 2008, 45, 15–29. [Google Scholar] [CrossRef] [PubMed]
- International Organization for Standardization. Prosthetics–Structural Testing of Lower-Limb Prostheses–Requirements and Test Methods; Standard; ISO/TC 168 Prosthetics and Orthotics; International Organization for Standardization: Geneva, Switzerland, 2016. [Google Scholar]
- International Organization for Standardization. Prosthetics–Quantification of Physical Parameters of Ankle Foot Devices and Foot Units; Standard; ISO/TC 168 Prosthetics and Orthotics; International Organization for Standardization: Geneva, Switzerland, 2016. [Google Scholar]
- Yang, Z. Development of a Gait Simulator for Testing Lower Limb Prostheses. Ph.D. Thesis, University of Bath, Bath, UK, 2020. [Google Scholar]
- Timmers, N. Simulating Gait with the 3R60 Knee Prosthesis and a Control Moment Gyroscope. Master’s Thesis, TU Delft, Delft, The Netherlands, 2020. [Google Scholar]
- Windrich, M.; Grimmer, M.; Christ, O.; Rinderknecht, S.; Beckerle, P. Active lower limb prosthetics: A systematic review of design issues and solutions. BioMed. Eng. OnLine 2016, 15, 5–19. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Richter, H.; Simon, D.; Smith, W.A.; Samorezov, S. Dynamic modeling, parameter estimation and control of a leg prosthesis test robot. Appl. Math. Model. 2015, 39, 559–573. [Google Scholar] [CrossRef]
- Marinelli, C. Design, Development and Engineering of a Bench for Testing Lower Limb Prosthesis, with Focus on High-Technological Solutions. Ph.D. Thesis, Politecnico di Milano, Milan, Italy, 2016. [Google Scholar]
- Predovic, J. Walking Cycle Man. Available online: https://svg-clipart.com/man/YS0etCS-walking-cycle-man-clipart (accessed on 8 May 2012).
- Millitzer, J.; Mayer, D.; Henke, C.; Jersch, T.; Tamm, C.; Michael, J.; Ranisch, C. Recent Developments in Hardware-in-the-Loop Testing. In Model Validation and Uncertainty Quantification; Barthorpe, R., Ed.; Springer International Publishing: Cham, Switzerland, 2019; Volume 3, pp. 65–73. [Google Scholar]
- Perry, J.; Burnfield, J.M. Gait Analysis: Normal and Pathological Function, 2nd ed.; SLACK: Thorofare, NJ, USA, 2010. [Google Scholar]
- Whittle, M.W. Gait Analysis: An Introduction; Butterworth-Heinemann: Oxford, UK, 1991. [Google Scholar]
- Murphy, D. 19—Normal Human Gait. In Fundamentals of Amputation Care and Prosthetics; Demos Medical Publishing: New York, NY, USA, 2013. [Google Scholar]
- Winter, D.A. The Biomechanics and Motor Control of Human Gait; University of Waterloo Press: Waterloo, ON, Cananda, 1987. [Google Scholar]
- Maus, H.M.; Lipfert, S.W.; Gross, M.; Rummel, J.; Seyfarth, A. Upright human gait did not provide a major mechanical challenge for our ancestors. Nat. Commun. 2010, 1, 70. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Blickhan, R. The spring-mass model for running and hopping. J. Biomech. 1989, 22, 1217–1227. [Google Scholar] [CrossRef]
- Maus, H.M. Towards Understanding Human Locomotion. Ph.D. Thesis, Technical University of Ilmenau, Ilmenau, Germany, 2012. [Google Scholar]
- Vielemeyer, J.; Müller, R.; Staufenberg, N.S.; Renjewski, D.; Abel, R. Ground reaction forces intersect above the center of mass in single support, but not in double support of human walking. J. Biomech. 2021, 120, 110387. [Google Scholar] [CrossRef] [PubMed]
- Maus, H.M. Stabilisierung des Oberkörpers beim Rennen und Gehen. Diploma Thesis, Friedrich Schiller University Jena, Jena, Germany, 2008. [Google Scholar]
- Holzberger, F. Vergleich von Gehmodellen des Menschen zur Verwendung in Prothesen-Tests. Semester Thesis, TU München, Munich, Germany, 2020. [Google Scholar]
- Fan, K. Setting up a Hybrid Substructuring Test for Prosthetic Feet. Master’s Thesis, Technical University of Munich, Munich, Germany, 2020. [Google Scholar]
- Nolan, K.J.; Yarossi, M.; Mclaughlin, P. Changes in center of pressure displacement with the use of a foot drop stimulator in individuals with stroke. Clin. Biomech. 2015, 30, 755–761. [Google Scholar] [CrossRef] [PubMed]
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer: Berlin, Germany, 2016; Chapter 18. [Google Scholar]
- Insam, C.; Göldeli, M.; Klotz, T.; Rixen, D.J. Comparison of Feedforward Control Schemes for Real-Time Hybrid Substructuring (RTHS). In Dynamic Substructures; Springer International Publishing: Cham, Switzerland, 2021; pp. 1–14. [Google Scholar]
- Kistler Group. Instruction Manual, Multicomponent Dynamometer Type 9129AA; Kistler Group: Winterthur, Switzerland, 2015. [Google Scholar]
- Geyer, H.; Herr, H. A muscle-reflex model that encodes principles of legged mechanics produces human walking dynamics and muscle activities. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 263–273. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Variable | Value |
|---|---|---|---|
| , | 1 m | 0.84 m | |
| 30 kg | 0.16 m | ||
| 3 kgm2 | 0.005 kg | ||
| 4.69 /s | |||
| 0.25 m | 0.1 m | ||
| 0 m | 0.97633 m/s | ||
| 1.0709 m | 0 m/s | ||
| 0 rad | −0.0071 /s | ||
| Solver | Euler | 0.0002 s | |
| 0.001 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Insam, C.; Ballat, L.-M.; Lorenz, F.; Rixen, D.J. Hardware-in-the-Loop Test of a Prosthetic Foot. Appl. Sci. 2021, 11, 9492. https://doi.org/10.3390/app11209492
Insam C, Ballat L-M, Lorenz F, Rixen DJ. Hardware-in-the-Loop Test of a Prosthetic Foot. Applied Sciences. 2021; 11(20):9492. https://doi.org/10.3390/app11209492
Chicago/Turabian StyleInsam, Christina, Lisa-Marie Ballat, Felix Lorenz, and Daniel Jean Rixen. 2021. "Hardware-in-the-Loop Test of a Prosthetic Foot" Applied Sciences 11, no. 20: 9492. https://doi.org/10.3390/app11209492