2.1. Precision Agriculture (PA)
Precision agriculture is a fundamental component of the third wave of modern agricultural revolutions. The first agricultural revolution took place during the strengthening the mechanization from 1900 to 1930. Throughout this period, each farmer produced enough food to feed about 26 people. In the 1990s, there was the Green Revolution with new genetic modification methods, which resulted in each farmer can feed about 155 people. The world population is expected to reach 9.6 billion by 2050 [
16], and to meet demand, food production must double from current levels. Precision agriculture is a system of crop productivity management based on complex aerospace, information, and communication technologies [
17]. It provides irrigation and fertilization only for those fields that need it and chemical treatment for only diseased plants. This involves carrying out all agro-technical activities at the optimum time, depending on the specific conditions, etc., which allows obtaining savings of 10% to 50% [
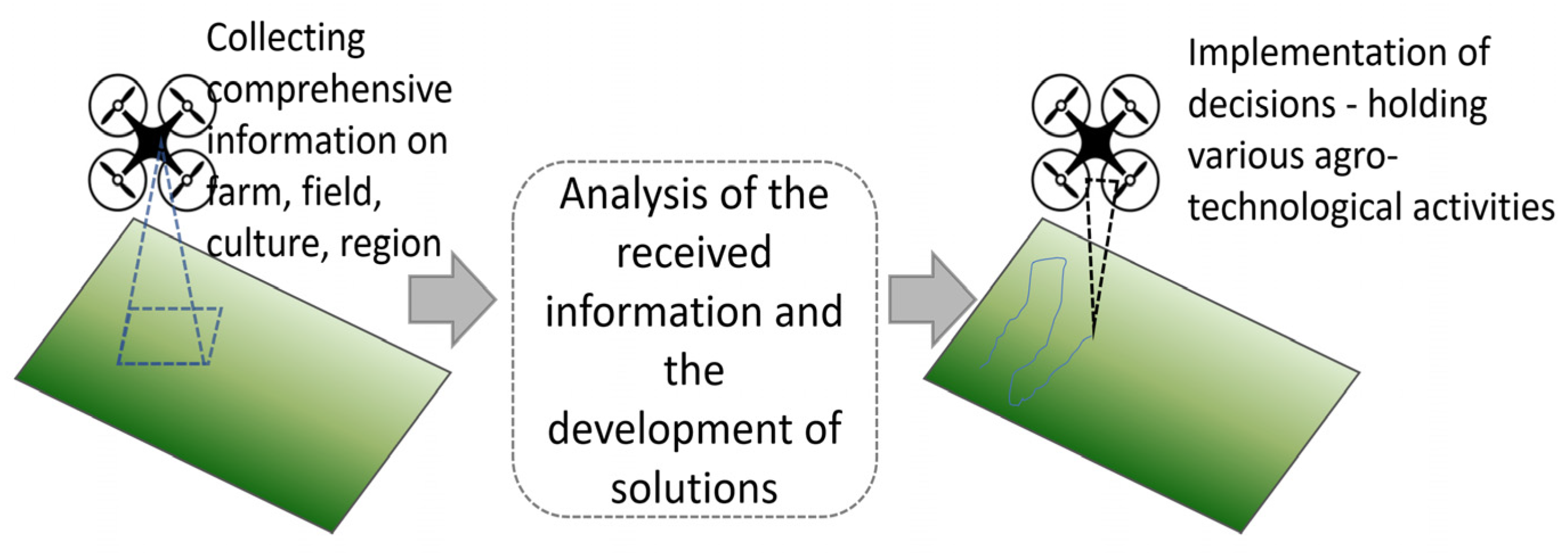
18]. Precision agriculture involves multiple elements and three main steps; the order of applying them is presented in
Figure 2:
Collecting comprehensive information on the farm, field, culture, and region;
Analysis of the received information to plan agro-technological events and the development of solutions;
Implementation of decision-holding various agro-technological events (application of fertilizers, herbicides, biophages).
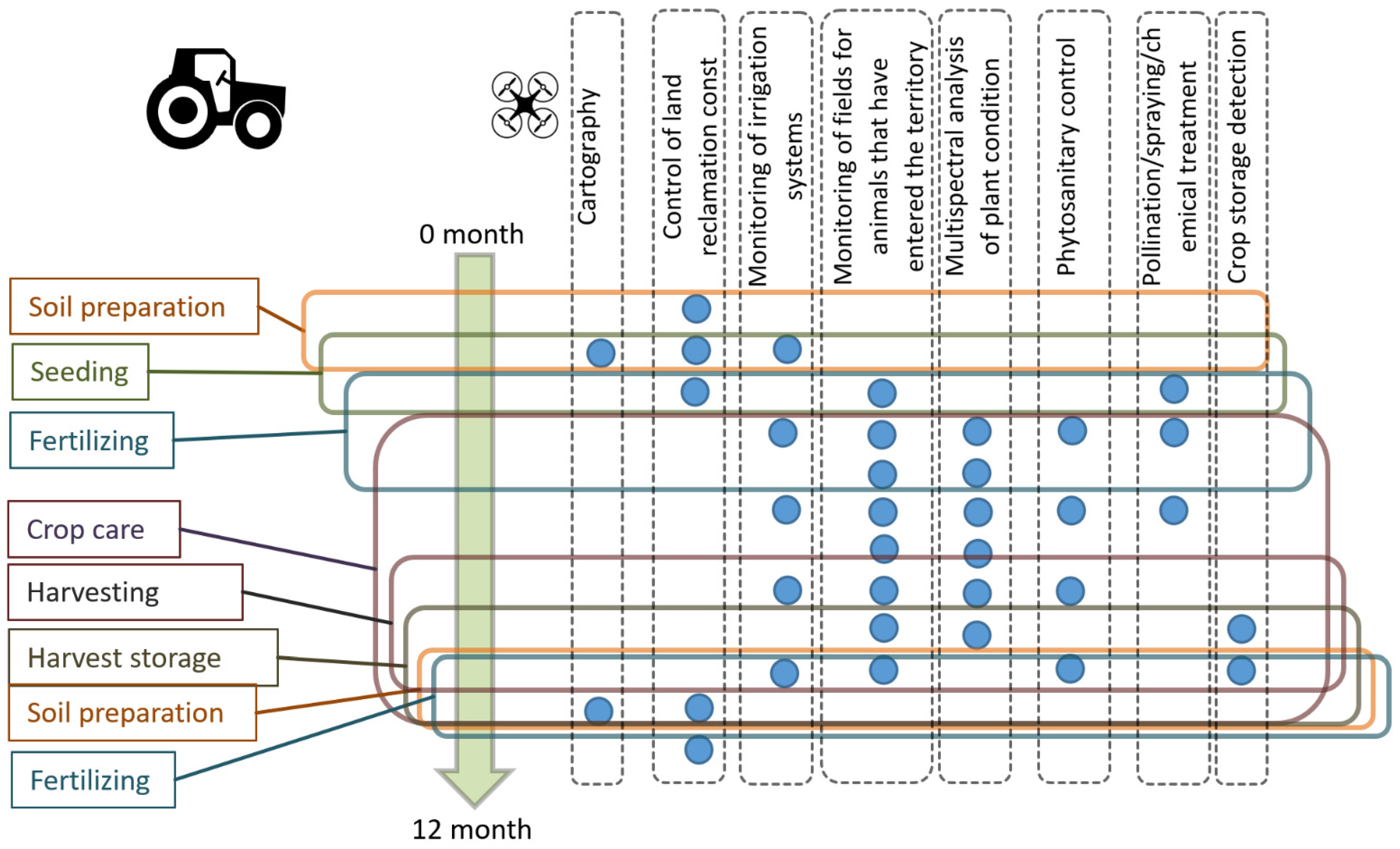
UAVs make it possible to use the potential of precision agriculture at full scale, not only at the stage of information gathering (the creation of accurate field maps with all their characteristics and features, determination of soil moisture, identification of pests [
19], etc.), but also at the stage of implementation of decisions (for example, spot treatment with pesticides) [
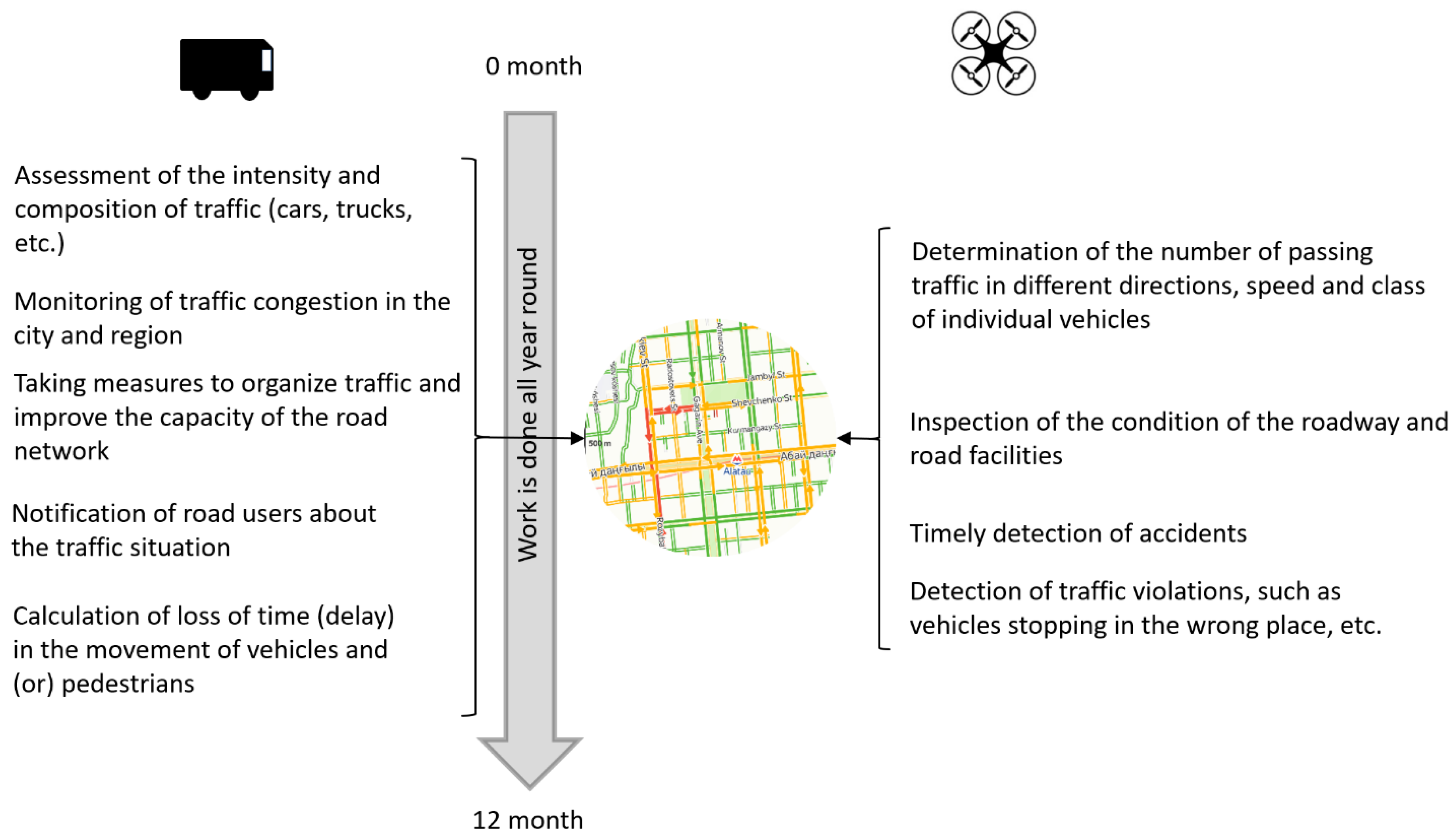
20] (see
Figure 3). The figure shows the main agricultural activities on the cultivation of crops during the year (left) and the possible participation of UAVS in solving the tasks of PA (right).
The UAV can be equipped with different sensors, but most often they use GPS, a multi/hyperspectral camera, a humidity sensor, and a barometer [
20]. In particular, it is important to have a camera covering the visible and near-infrared (NIR) range, since multispectral camera recording is used to determine the normalized difference vegetation index (NDVI); it has become one of the most reliable tools for easy and rapid remote assessment of plant and crop conditions since 1973.
To this day, the NDVI is the most common vegetation index used in agriculture.
NDVI allows agronomists and farmers to see fading crops in the field two weeks before the human eye can detect them. Diseased plants can be identified more quickly in the infrared range than with the unaided eye, so farmers can identify potential problems, such as diseases, pests, fungi, or arid zones, and solve the problems faster and without serious consequences.
Kazakhstan implements the precision agriculture on test sites. These test sites demonstrate 20–40% savings and a significant increase in the yield [
21,
22]. Nevertheless, there are no complex solutions with a wide use of mobile data collection platforms in the market of Kazakhstan. It creates the certain lag with the global trends. As a result, the competitiveness of agro-industrial complex of the Republic of Kazakhstan is significantly reduced [
23]. At the same time, the application of new methods based on UAV suggests a substantial increase in yields and efficiency.
The results will have a significant impact on the development of the domestic market for agricultural UAVs, and can also be used for the development of agricultural drones’ solutions abroad.
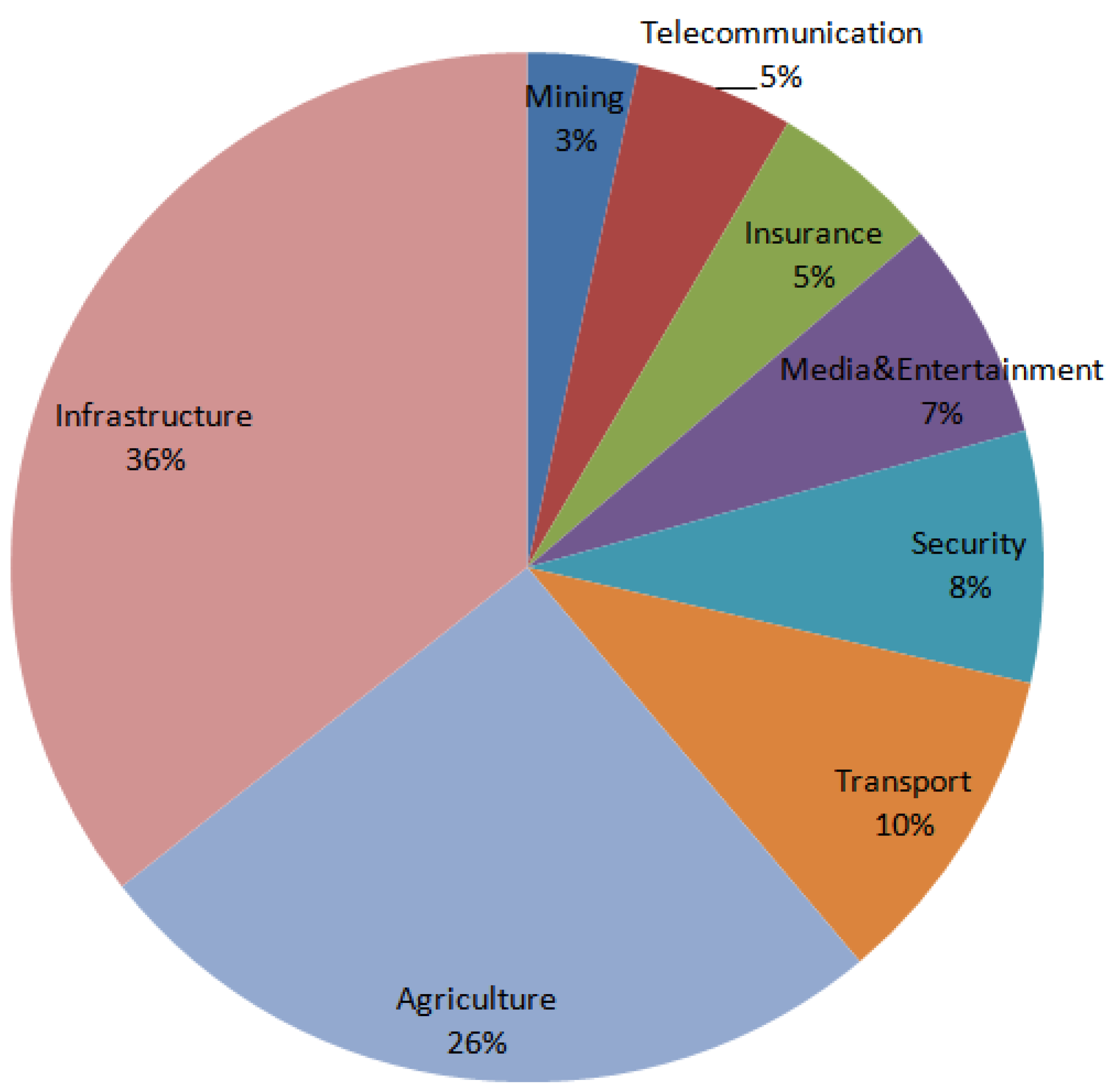
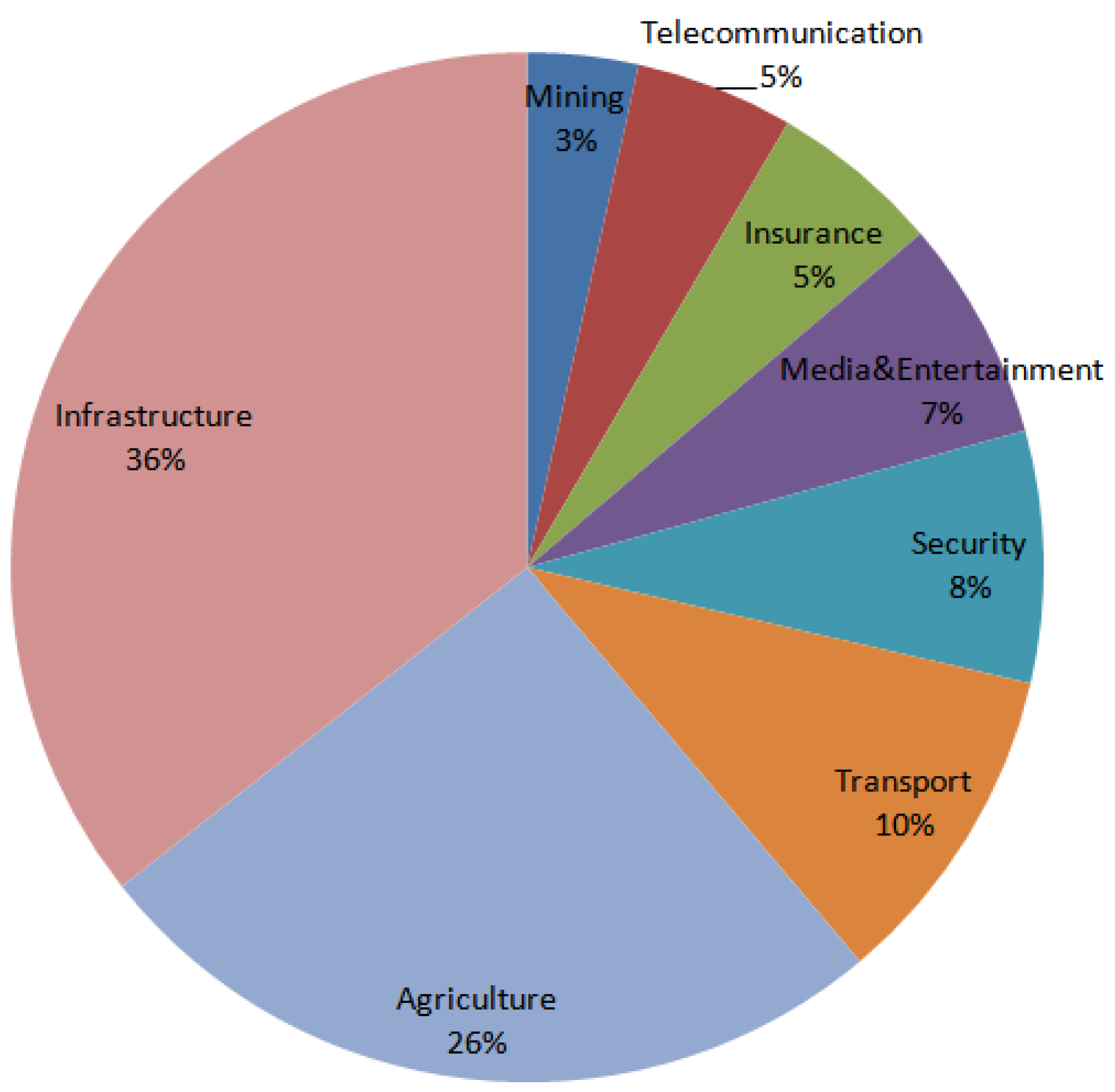
Internationally, the expected volume of the market for agricultural drones will be USD 4.8 billion by 2024, and the USA will continue keeping the main market share [
24]. The main sources of growth will be: increasing venture capital financing, awareness of the benefits of agricultural UAVs, and software solutions for field research and data analysis.
By extrapolating this amount by the size of the population and the income level in Kazakhstan, it is possible to assume the formation of the agricultural UAV market of several tens of millions of dollars.
The advantage of application of precision agriculture models for the main crops of Kazakhstan can be estimated based on the data [
25,
26].
Table 1 shows generalized data on the current yield of the main crops grown in the Republic of Kazakhstan in comparison with the expected yield. According to [
26], the introduction of precision agriculture leads to yield improvements from 42 to 80% for different crops.
The prerequisites of employing IUAVT is low productivity in the field and growing demand for the organic products [
1]. With the widespread integration of precise agriculture methods in the Republic of Kazakhstan, the expected profit increased is USD 5.4 billion. Here, 6% or USD 324 million, according to data [
27], will be associated with the application of agricultural drones, without taking into account market the features of grain sales.
To implement the precision agriculture systems, it is necessary to develop the models and methods of decision support systems using machine learning algorithms which are based on processing the heterogeneous data obtained with the use of UAVs. It is needed to develop models and methods of decision support using machine learning based on processing the heterogeneous data obtained with the use of UAVs, and to develop methods for UAV group control to perform plant protection and fertilization tasks. Another issue is solving the computer vision problems for processing multi-spectral images from low-flying platforms (see
Appendix A Table A2).
2.2. Monitoring of Environmental Pollution (MoEP)
Environmental pollution as a result of industrial development, mining, and urban growth is a serious problem. Environmental pollution affects human health [
28], agriculture [
29], the climate system, and the hydrological cycle [
30]. Fast-growing cities face the atmospheric pollution problems [
31]. Polluted air, water, and soil increase risk of coronary heart disease, lung cancer, cerebrovascular disease, chronic obstructive pulmonary disease (COPD), and respiratory infections, resulting in morbidity and mortality.
One of the promising practices for collecting data related to environmental pollution is using UAVs, equipped with cameras of various spectral ranges, a set of sensors, as well as spectrometric and gamma-radiometric equipment [
32]. Existing examples show the possibilities of using UAVs to assess the radiation situation in the areas, dangerous for humans [
33], for example, radiation mapping [
34] and examining forests near Chernobyl [
35]. In addition, UAV-based complexes are used for the detection of volatile organic substances (VOC) emitted as a result of emergencies [
36] and for monitoring air pollution [
37].
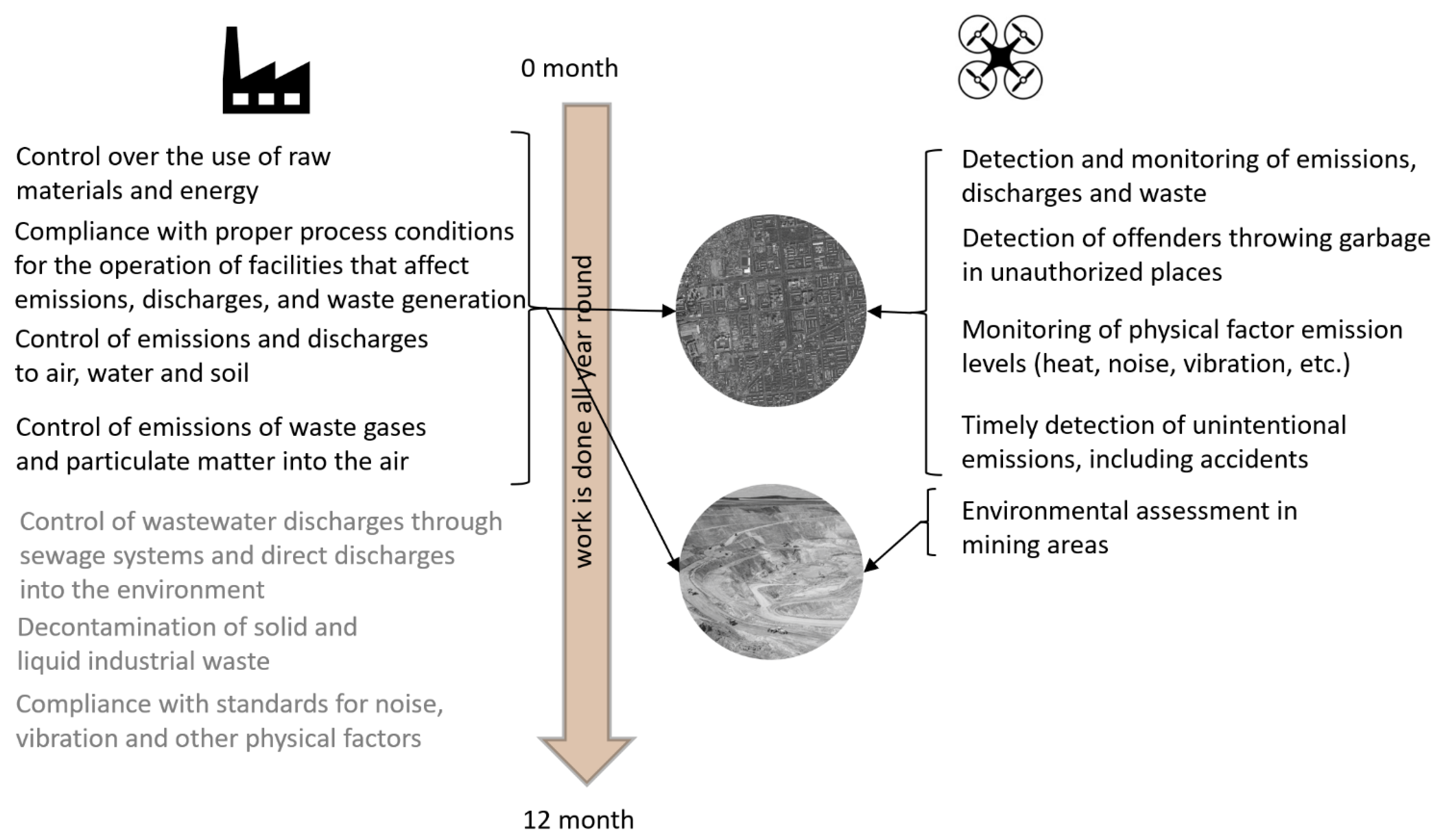
The scheme in
Figure 4 shows the main tasks of environmental control (left) [
38] and the way that UAVs can help in solving these tasks.
Kazakhstan’s environmental problems are associated with the growth of cities, the use of coal and oil for energy and heat generation, and the work of the extractive industry.
Intensive development of natural resources, often without regard for environmental impacts, inevitably leads to land and soil contamination. According to the land balance data for 1 November 2015, there are over 240 thousand hectares of disturbed lands in the Kazakhstan, where overburden and rock dumps, tailing ponds, ash dumps, coal and mining quarries, etc. are located. Most of these lands are located in Karaganda, Kostanay, Mangistau, Akmola, East Kazakhstan, and Turkestan regions [
39].
It can be noted that the largest city of Kazakhstan, Almaty, has one of the highest levels of atmospheric pollution [
31,
40], which leads to a significant growth of chronic obstructive pulmonary disease, almost twice exceeding the average level in post-Soviet countries [
41].
According to the World Bank estimates, polluted air increases healthcare costs in Kazakhstan by about USD 1 billion per year [
42]. Reducing the concentration of the smallest PM2.5 dust particles by only 1 microgram will save about USD 56.7 million annually by reducing mortality and increasing the number of working days [
43].
Payments for environmental emissions in Kazakhstan, which amounted to USD 216.7 million in 2017, are increasing annually by 8% according to the Organization for Economic Cooperation and Development [
44].
The use of UAVs for the environmental monitoring tasks is conditioned by significant economic losses and a threat to public health [
43]; it is expected that the use of UAVs will increase the intensity and quality of control over emissions into the atmosphere, which can reduce industrial environmental violations [
37], reduce the number of smog days [
45], and reduce greenhouse gas emissions into the atmosphere [
46]. The estimated annual expenses are USD 1555 million.
It is necessary to develop the methods of operational control of hazardous substances emissions at the production facility and quality assessment of reclamation works based on heterogeneous data received from the UAV board. The following problems should be solved in this area: increasing flight time, payload, accuracy, and sensitivity of sensors; and data processing software, including computer vision systems (to assess the quality of remediation work) when performing crop protection and fertilization tasks. The evaluated economic effect of IUAVT employment is USD 87.9 million (see
Appendix A Table A3).
2.3. Exploration of Minerals (EoM)
In the minerals’ exploration sphere, due to the gradual depletion of the existing field resources [
47], it is necessary to apply new methods that intensify the processes of geological exploration. This task is quite acute in Kazakhstan, thereby the President of the Republic instructed to develop a program of geological exploration [
48]. The concept of the program was recently proposed in [
49]. In recent years, the use of UAVs in the mining industry is rapidly expanding, changing the entire industry. The leader in this field is the Canadian company known as Pioneer Aerial Surveys [
50]. Its main spheres of UAV application are as follows [
51]:
One of the main advantages of using UAVs compared to the airborne surveys or traditional field surveys is the significantly lower cost of exploration, especially for remote regions with poor infrastructure.
At the same time, the use of drones is possible at all stages of the field development: during prospecting, development [
52], and reclamation. The use of the UAVs becomes useful for geological applications due to its low operating costs and ease of use.
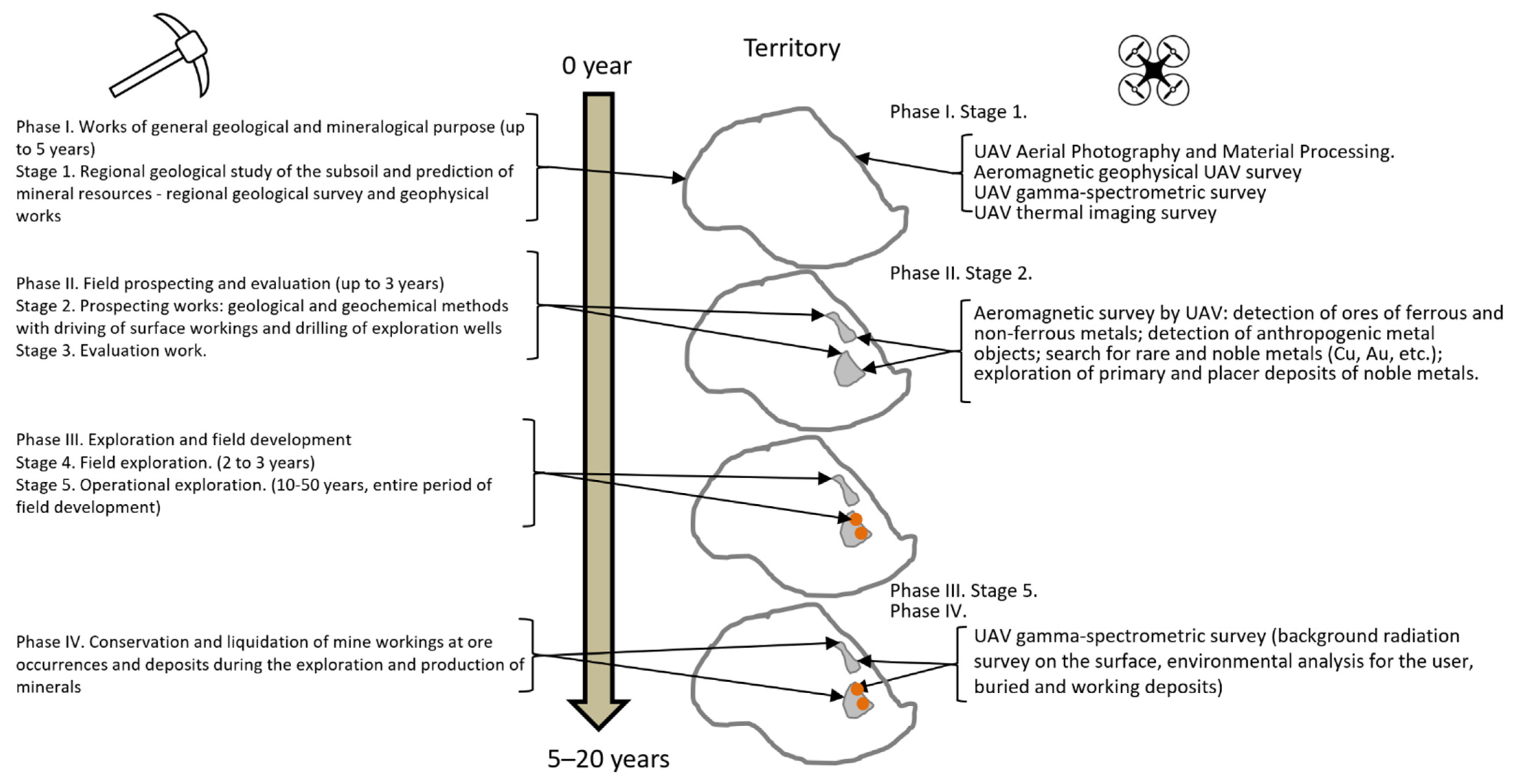
The period of geological exploration and mining can average up to 50 years, they are divided into stages or phases. The first phase is regional geological studies, making the geological maps of small scales, accompanied by regional geological and geophysical studies. A large area of several hundred km is usually investigated at this stage. The photogrammetric, aeromagnetic, gamma-spectrometric, and thermometric surveys can be performed with the use of UAVs, thereby it is possible to carry out part of geological exploration over a large area more economically and efficiently.
The next phase is the stage of exploration and evaluation of resources in a large area of sites with increased concentrations of useful components. An aeromagnetic survey can also be used in the areas of ore occurrence; this survey can identify ore or non-metallic objects, magnet-susceptible or not, radioactive or not, and further several wells will be drilled and several ditches will be dug.
In the third phase, the deposits and an assessment of mineral reserves and resources can already be identified for all the performed studies. At this stage, the main types of drilling are carried out according to the certain network, and the geochemical and other types of sampling are taken directly from the object. At this stage, the use of UAVs is not provided.
At the last stage (the stage of development of mineral deposits), as well as after the end of production, UAVs can be used to assess radioactive and other types of man-made environmental pollution.
The stages of exploration and mining operations and the possibilities of using the UAVs are shown in
Figure 5. The figure was created based on the sources [
53,
54,
55,
56].
Magnetic and hyperspectral studies are of particular interest for mineral exploration, and groups of authors have published studies of magnetic data collected by the UAVs for such applications [
57,
58]. Magnetic measurements play an important role in mineral exploration, as magnetization in rocks is mainly related to magnetite and other iron minerals that can be used in mapping and exploration [
59]. Currently, magnetic imaging is limited to mapping iron-containing minerals, such as hematite, jarosite, and goethite, which also have spectral characteristic features in the visible and near-infrared range.
Hyperspectral imaging (HSI) is a powerful method of exploration and mapping in areas where the rock surface is well exposed, and where geological bodies and minerals composition can be estimated by the spectral characteristics of the electromagnetic spectrum in the visual and infrared range [
60]. The system can also identify vegetation features that can be used as indicators of mineralization (i.e., different vegetation types that correlate with major rock types [
61]). Other potential applications include rare earth element mapping and mine tailings monitoring [
62].
When searching for deposits, it is necessary to analyze a large amount of data: space images, soil and groundwater samples, presence of minerals-indicators, geophysical survey data, and many others. It is difficult for a person to process such a large amount of information. In particular, at the stage of exploration, identification of potentially prospective sites of ore, oil, and gas can occur after determining the correlation of field and well survey data; laboratory analysis of samples; and data recorded by drone sensors for ore, oil, and gas bearing and low potential sited. This problem has many parameters and hidden dependencies; it cannot be formalized and accurately solved by classical methods, but approximate solution can be obtained by machine learning methods. Algorithms such as artificial neural networks (ANN), support vector machines (SVM), and convolutional neural networks (CNN) are most often used in exploration geophysics [
63].
The set of sensors installed on the UAV is determined by the task, but most often it is a hyperspectral camera, magnetometer, and GPS [
60]. Due to the limitations imposed on the weight and size of the equipment, a camera operating in the VNIR band (400–1100 nm), such as RICOLA, is usually installed as a hyperspectral camera [
64]. The spectral characteristics in this range allow the detection of iron oxides (range 800–1000 nm) as well as rare earth elements (Nb, Ta, …) [
65]. Data validation is performed by ground-based measurements, in particular, X-ray fluorescence analysis, X-ray diffraction analysis, and optical microscopy [
47]. Apart from VNIR range cameras, a SWIR range camera (1400–3000 nm), e.g., SWIR 640 P-Series, can be installed if necessary [
66]. In general, it is necessary to work in a variety of spectral ranges to find different groups of minerals [
67]. Given the presence of large uranium deposits in Kazakhstan, it is also necessary to equip the drone with a radiometer.
The main problem of remote sensing with drones is the need to maintain accurately the height above the ground, bypassing the terrain elements. If this condition is not met, significant distortions to the data may occur, and a complex system of corrections should be developed and implemented [
68]. In addition, the corrections for the atmospheric phenomena, illumination, surface inclination angle, etc. have to be made [
69]. These issues require the development of the new methods of searching for minerals. These methods can be based on the employment of mobile platforms for collecting heterogeneous data, computer vision systems, and new search criteria identified by machine learning.
So far, the unsolved problem is the development of the criteria for the search for minerals using computer vision, machine learning and UAVs. For example, for oil and gas fields, the search criteria are powerful accumulations of sedimentary rocks limited by deep faults; the composition of rocks is mainly carbonate with traces of bituminosity. For copper-porphyry copper deposits, the most important factor of the regional forecast is the substrate in which ore-magmatic systems are located. They should be tectonic zones and terranes composed of oceanic and island-arc melanocratic formations and metasomatic changes at the boundary of the magmatic body and the host rocks. The possibility of using highly mobile platforms and artificial intelligence methods for reliable identification of search criteria requires further research.
The countries of the world spend huge sums of money for exploration works, but the discovered fields do not pay off these expenses. According to MinEx Consulting [
70], USD 140 billion was spent between 2005 and 2014, while the value of discovered mineral resources was USD 93 billion only. The technologies developed under the program will reduce exploration costs, which may result in significant savings on a global scale.
The use of unmanned technologies, combined with artificial intelligence techniques, will speed up geological exploration on large areas. For example, on an area of 10,000 square km, a comparative calculation of the cost of the traditional ground-based method (using motor vehicles) with manual geochemical sampling (USD 335,000) and the use of UAVs equipped with a hyperspectral camera and compact magnetometer (USD 68,000) shows almost five-fold advantage of using UAVs for some types of geological exploration. Two main sedimentary basins have been identified in Southern Kazakhstan with the total area of 248,000 square km: the Shu-Sarysu basin (168,000 square km) and the South-Torgay basin (80,000 square km) [
71]. Consequently, the application of the described technology can result in savings of about USD 6 million for the territory of Southern Kazakhstan only.
In accordance with the program [
72], it is necessary to study about 5.5% of the territory of Republic (149,000 square km) and to increase the degree of geological and geophysical exploration of sedimentary basins (900,000 square km [
73]). The costs of such work using traditional methods of geological exploration will amount to about USD 42 million. The costs of these works with employment of IUAVT can amount to about USD 8.5 million.
In total, for the territory of Kazakhstan, savings in geological exploration with the use of UAVs and machine learning methods may amount to more than USD 18 million compared to the traditional methods. At the same time, the increase in labor productivity will amount to more than 300%. We would like to note that this assessment concerns only the part of necessary work. We also assume that the use of a hyperspectral camera could reduce sampling for laboratory studies. At the same time, some types of deposits require sampling, laboratory studies and well drilling.
The use of IUAVT for solving the tasks of minerals exploration has some prerequisites, the main of them are significant exploration costs that currently do not provide return [
70] and the concept of the State program of geological exploration for 2021–2025 in Kazakhstan [
72]. The estimated annual expenses are USD 41 million.
It is necessary to develop the methods of mineral exploration based on the application of highly mobile platforms for the collection of heterogeneous data, computer vision systems, and new search criteria identified by machine learning. The following problems should be solved in this area: increased flight time; payload; accuracy and sensitivity of sensors; data processing software, including computer vision; and control systems. The evaluated economic effect of IUAVT employment is USD 33 million (see
Appendix A Table A4).
2.4. Monitoring of Wild Animal Life (MoWAL)
Kazakhstan is not only rich in minerals, but also in biological resources, one of which is wild animals. Considering the nature management, there is a need for transition from extensive methods of hunting to their intensification. At present, the country has all the prerequisites for the introduction of “green” technologies for hunting activities. This implies a combination of different uses of wildlife and its protection, including habitats and hunting grounds, increasing their productivity, reproduction, and game ranching. Experience of a number of countries (USA, Canada, Germany, Czech Republic, Sweden, Finland, etc.) shows that such hunting management allows obtaining its products in quantities comparable to the corresponding animal industries. For example, in Sweden, with an area 6 times less than the area of the Republic of Kazakhstan and three times more population density, the population of moose alone is 400 thousand, and the annual production volume is about 100 thousand heads [
74]. For comparison, a limit of 78 heads has been allocated in the Republic of Kazakhstan in 2015 (according to the Committee for Forestry of Wildlife of the Ministry of Agriculture of the Republic of Kazakhstan).
One of the ways of sustainable use of animals assigned to hunting sites is through economic assessment of their cost and productivity of hunting grounds. It is difficult to justify the amount of investment in some measures for the reproduction, protection, and sustainable use of animal resources without such estimation. This assessment should be based, first of all, on knowledge of productivity of hunting grounds and number of animals included in hunting sites. This, in turn, should become the basis for determining the economic indicators of natural resources. All these factors serve as a basis for the development of payment standards for the use of wildlife and hunting grounds. The solution of this problem is one of the priorities of the world community in the field of sustainable natural resources management.
According to the International Convention on Biodiversity Conservation (Rio de Janeiro 1992, [
75]), ratified by the Cabinet of Ministers of the Republic of Kazakhstan in 1995, each country involved in the convention, on the one hand, independently determines the principles and methods of sustainable use of biodiversity in its territory (in accordance with the convention and domestic legislation), and, at the same time, is responsible for the conservation of natural resources. In the Republic of Kazakhstan, these principles are laid down in the Constitution, the Environmental Code, and, in respect of wildlife, in the Law on Protection, Reproduction, and Use of Wildlife (2004) and relevant regulations. They also define the procedure for monitoring, cadaster, and accounting of animal resources related to hunting sites. At the same time, these documents do not define the participants of the monitoring, and the available methods of accounting are not adapted to hunting farms and specially protected natural areas. In order to eliminate this contradiction, it is necessary to monitor the number of wildlife representatives in a given area and to develop decision support systems for management and maintenance of biological and landscape diversity of unique natural ecosystems and their monitoring.
Collecting field zoogeographic data is a rather time-consuming process, mainly dependent not on the observer but on the representative of the animal world. It is impossible to calculate directly the population of commercial ungulates of mountain ecosystems of Kazakhstan by ground methods. However, it is possible to estimate roughly the number of animals, for example, boars, by indirect decoding signs. Such signs for them are trails, beds, and gusts. Data on the density of wild boar trails, obtained at different times of the year, allow determining the preferences of these animals in different periods foraging and staying on the territory of the reserve and outside its borders, depending on the hunting season.
Thus, the program should develop models and methods for operational monitoring, assessment and forecasting of biological and economic productivity of commercially exploited ungulate species.
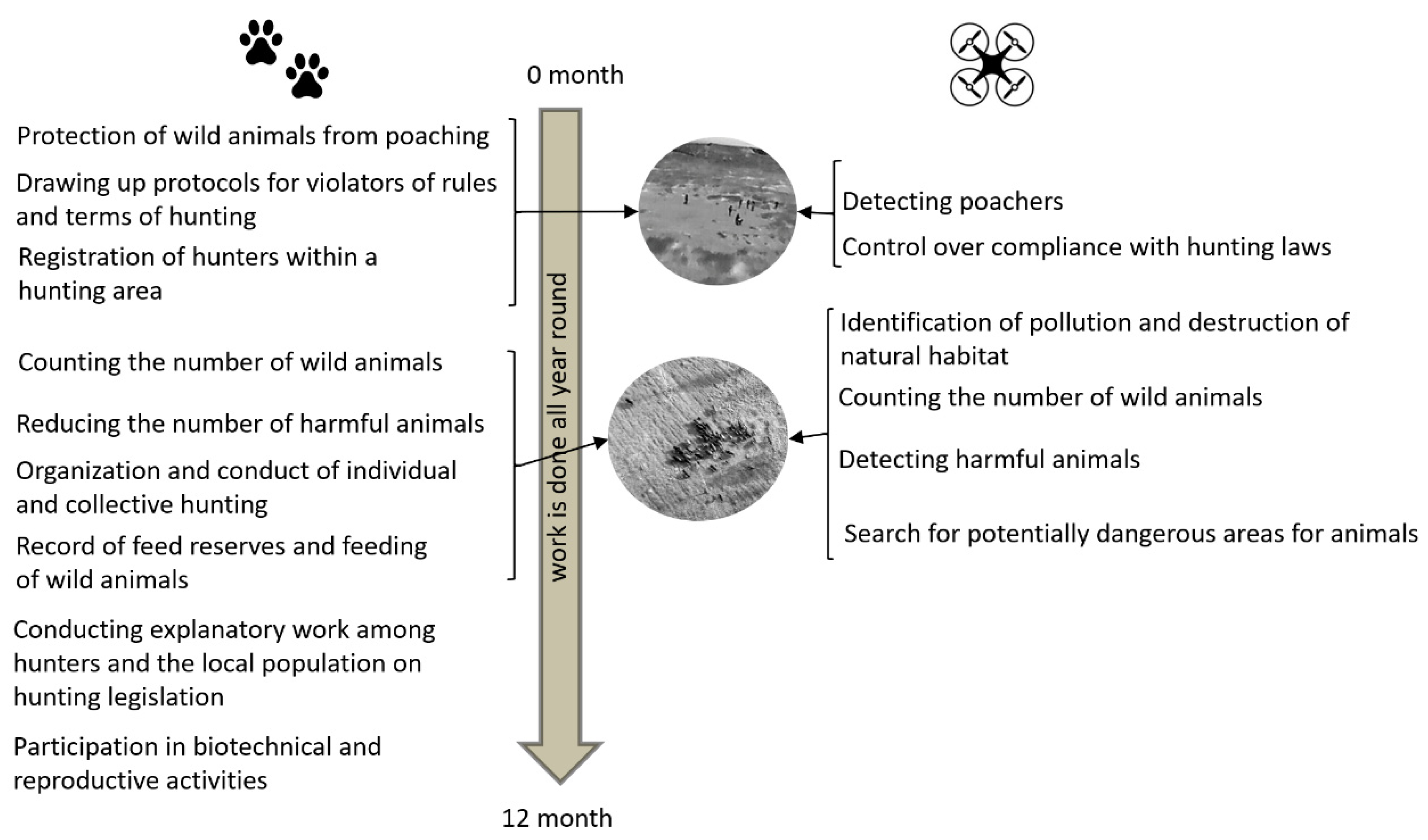
Figure 6 shows the tasks of the huntsman [
76] (left) and the possible use of UAVs to solve them (right). The data from the UAVs make it possible to determine the distribution ranges and the number of individuals [
77]. UAVs can be used to control pollution in wild nature [
78]. The employment of a multispectral and thermal camera enhances the capabilities of the method. Thus, UAVs equipped with an infrared camera are used to combat poachers [
79]. The work on searching for wild animals can be reduced by several times with the use of a thermal imaging camera [
80].
Comparative analysis of the cost of monitoring shows that aerial photography carried out once a quarter for 50 hunting grounds of Turkestan region with the total area of 80 thousand square km will be approximately twice as expensive (about USD 2.8 million) as compared to UAV (USD 1.4 million); these amounts are shown even without taking into account a number of unique features of the combined UAV platform and artificial intelligence system (for example a weaker impact on the ecosystem and the ability to perform operational monitoring). According to [
80,
81], IUAVT allows significant savings in animal monitoring.
It is necessary to develop models and methods for operational monitoring, assessment, and forecasting of biological and economic productivity of commercially exploited ungulate species. The areas of research and development are increased flight time; payload; accuracy and sensitivity of sensors; data processing software, including computer vision; and control systems. In general, savings from UAV technology and machine learning, related to all hunting grounds in Kazakhstan (702) with the area of 1,100,000 square km, are estimated at about USD 18 million per year (see
Appendix A Table A5).
2.6. Monitoring of Technical and Engineering Structures (MoTES)
The new industrial revolution, Industry 4.0 [
91], is based on the paradigm of the industrial Internet of Things (IIoT). IIoT provides a new type of business model [
92]. A key element of these models is collecting and processing the data throughout the entire life cycle of a product or structure.
IIoT application areas are as follows: transportation systems and vehicles, machinery, construction, houses, firefighting equipment, agricultural systems, mining and related equipment, medical devices, and personal products, etc. [
93].
UAVs are used for monitoring, for 3D models construction, for the detection and assessment of damages, etc. [
94].
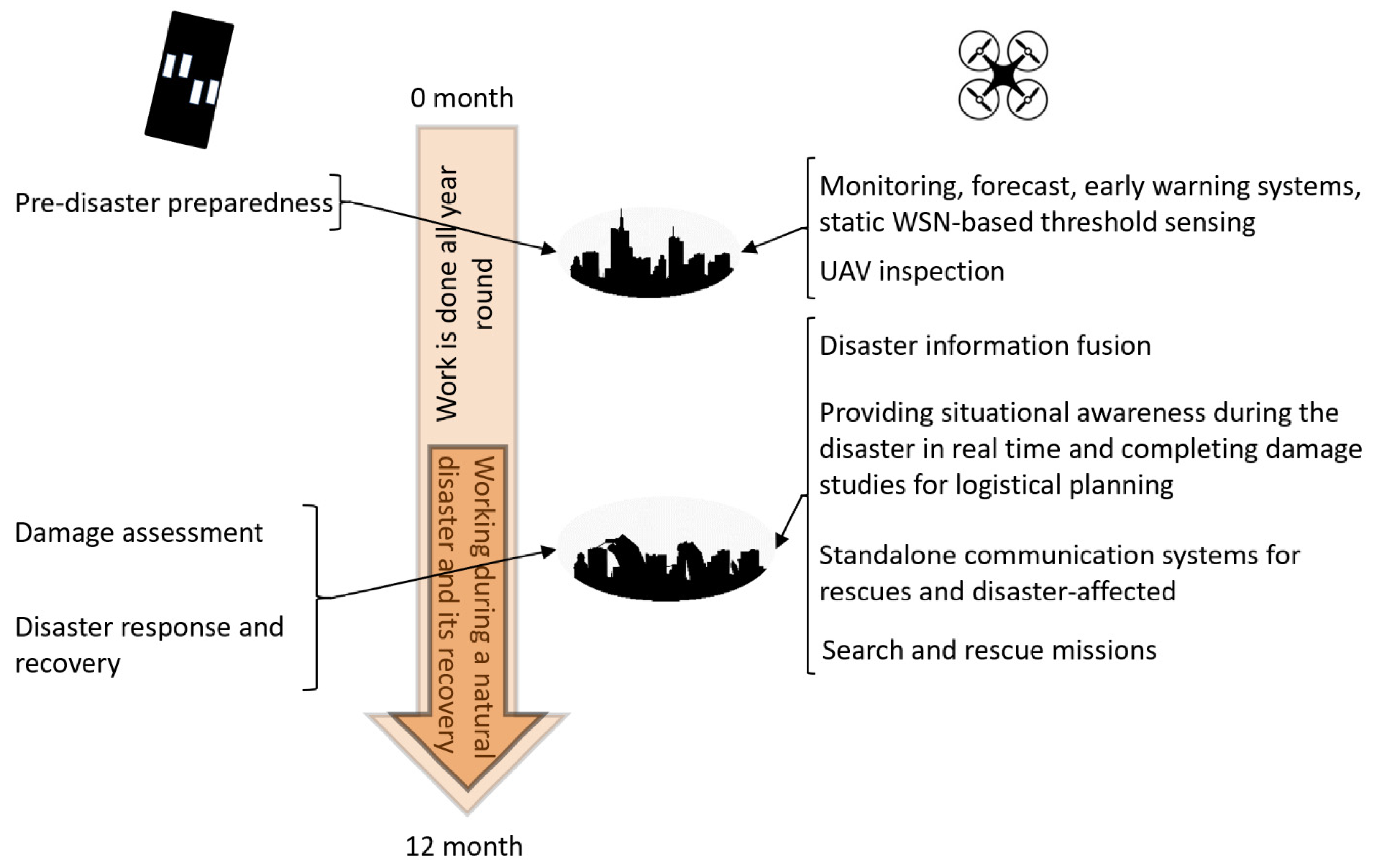
Figure 8 based on [
95,
96] illustrates usage of UAVs for tasks of such type.
UAVs allow getting quickly the collections of 3D images, including ones from hard-to-reach places [
97]. The obtained images are classified using deep learning, for example, to assess the condition of the wings of wind turbines [
98]. The use of noise sensors makes it possible to detect the increasing destruction [
99]. UAVs additionally equipped with an infrared camera can be used for monitoring of vast areas of photovoltaic stations [
100]. Re-equipment with additional ultrasonic and laser scanners allows the use of UAVs for monitoring of the steel structures [
101]. Along with the advantages of such use of UAVs, there are also disadvantages among which are flight restrictions, weather dependence, and weight restricting equipment.
The assessment of the economic effect of the use of UAVs for air patrolling pipelines in Kazakhstan is given in [
11], and its volume is about USD 7.9 million per year.
The main prerequisites of using IUAVT for monitoring of technical and engineering structures are the necessity to collect information on the condition of machinery and facilities, especially in hard-to-reach places for the implementation of tasks [
97,
98,
99,
100,
101].
It is necessary to develop methods for monitoring engineering structures using computer vision systems and machine learning to identify and prevent violations in their work and to predict their condition. Scientific and technical problems, such as the development of software for machine vision, image classification, and indoor flight control applications, should be solved in this area. The evaluated economic effect of IUAVT employment is USD 10 million (see
Appendix A Table A7).


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}