
An Air Spring Vibration Isolator Based on a Negative-Stiffness Structure for Vehicle Seat


Abstract
:1. Introduction
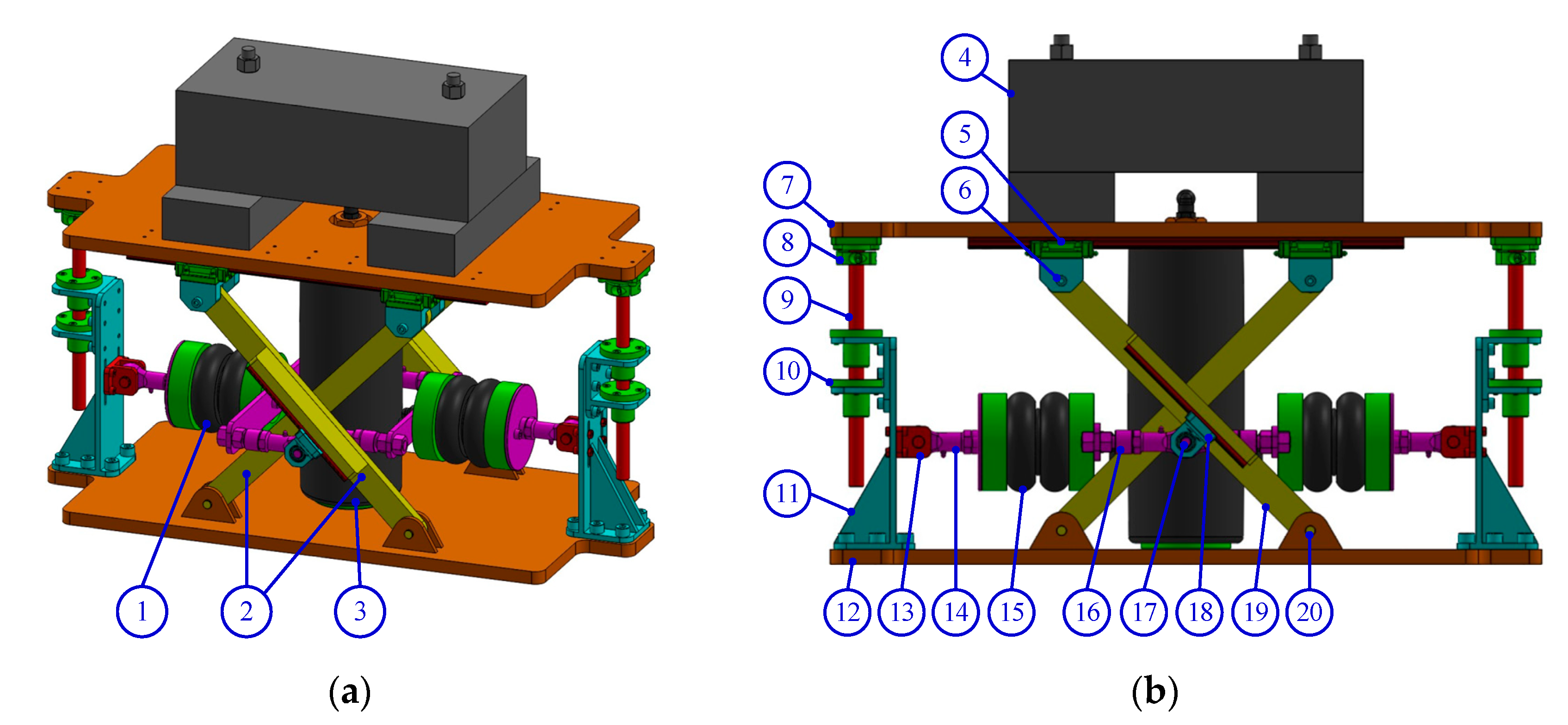
2. Design of the Air-Spring Vibration Isolator System
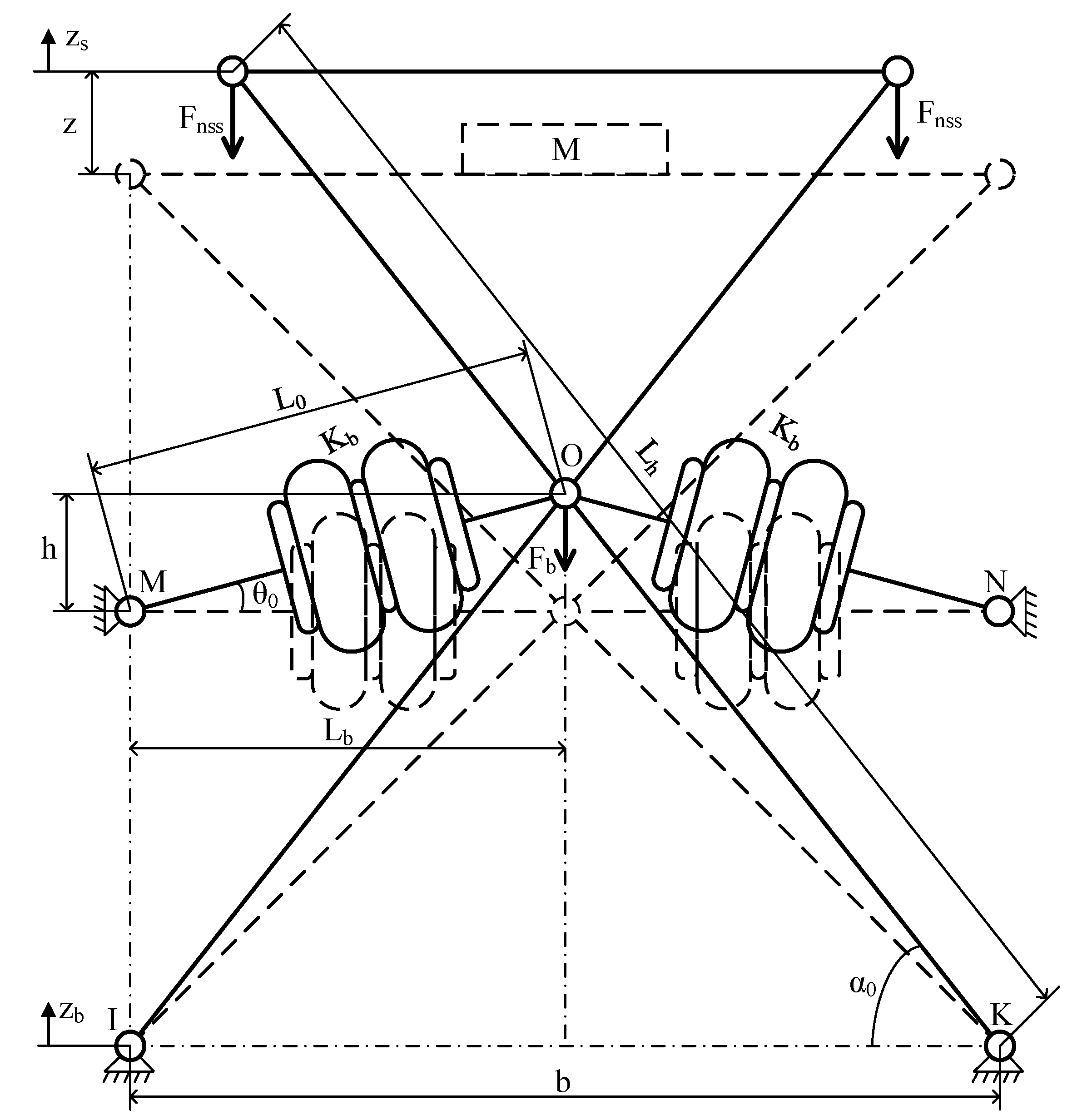
2.1. Model Description
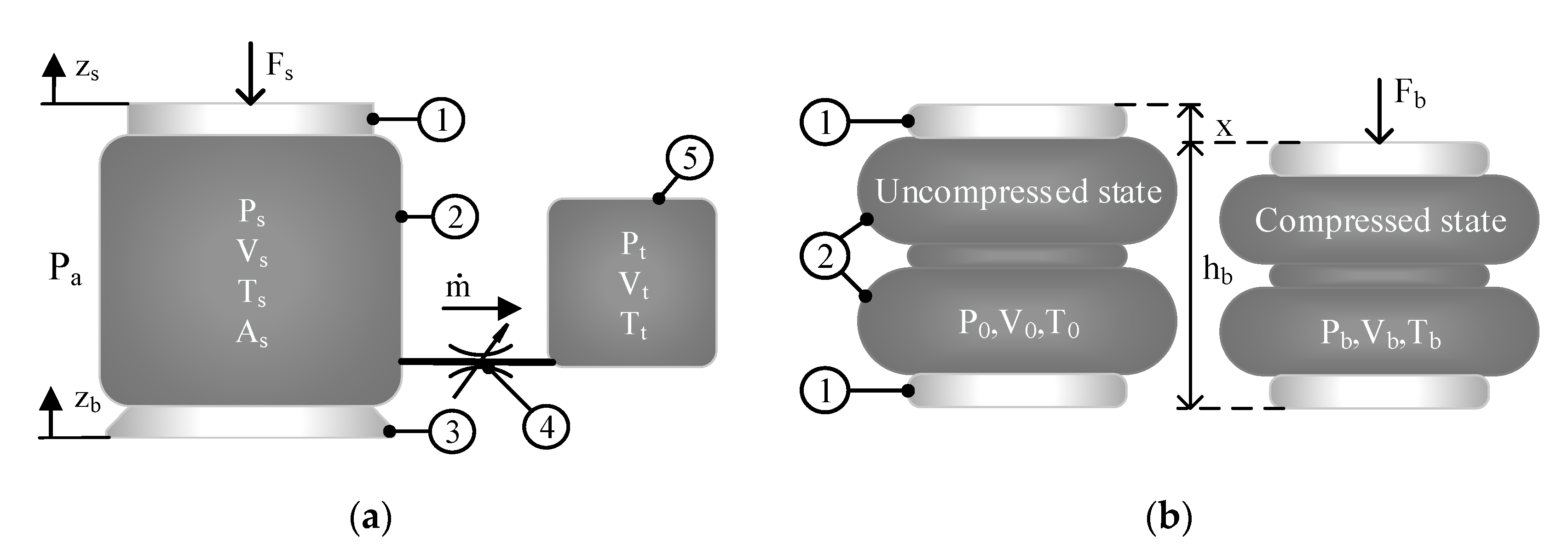
2.2. Analysis of the Characteristics of the Air Spring
3. Stability Analysis of the Air-Spring Vibration Isolator System
4. Simulation Results of the Air-Spring Vibration Isolator System
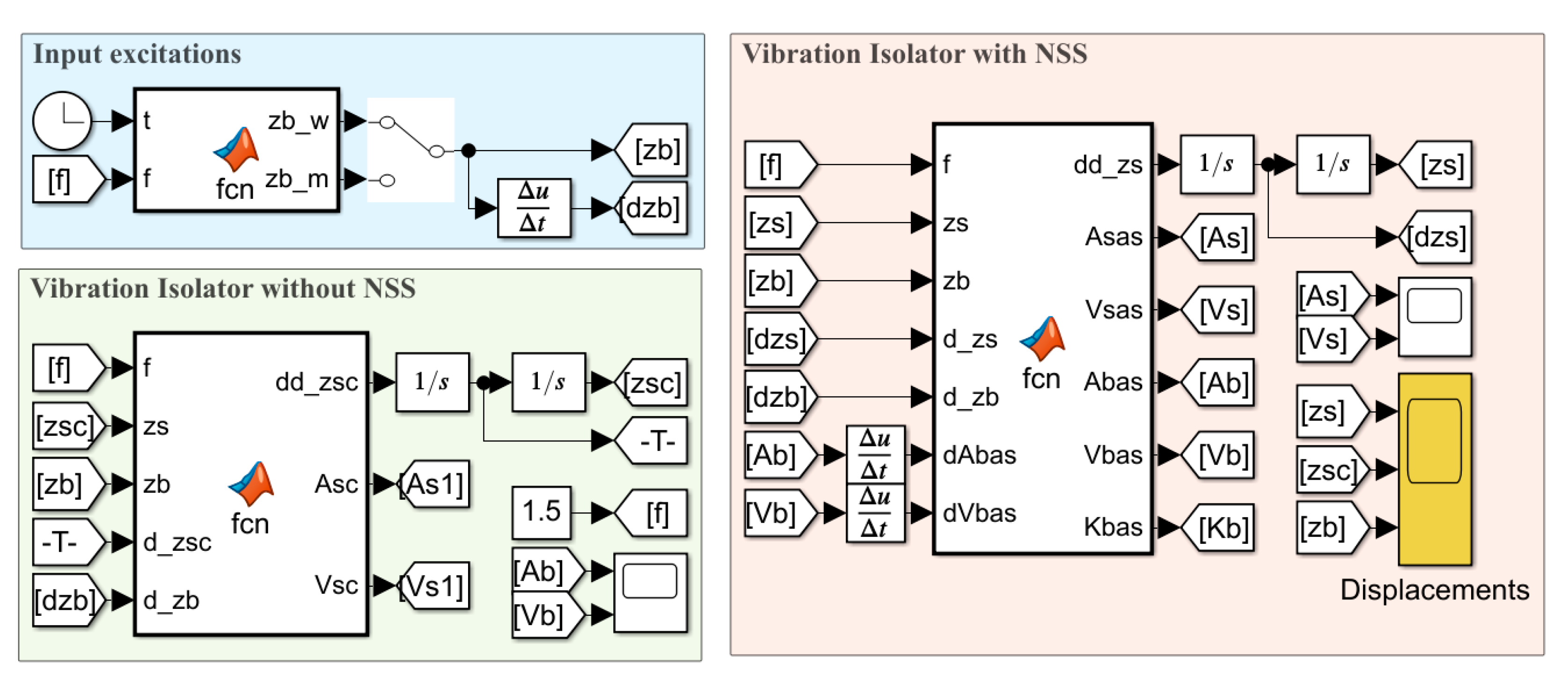
4.1. Numerical Simulation
4.2. Simulation Results
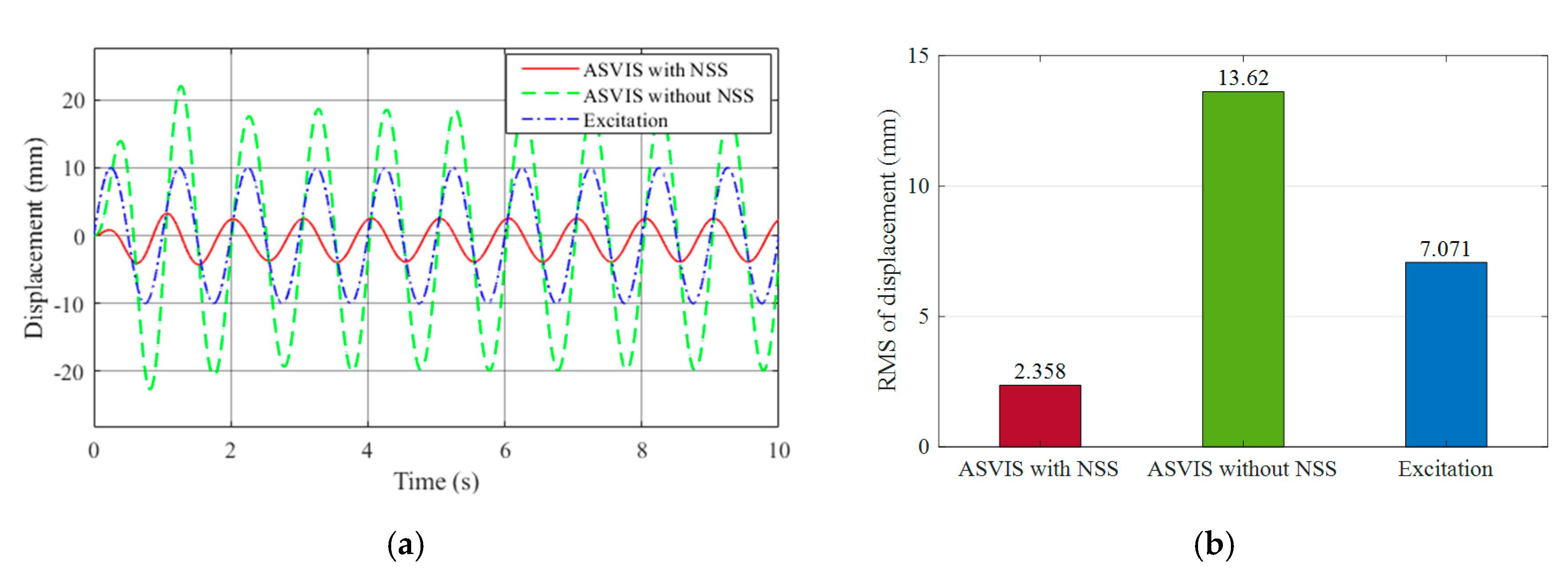
4.2.1. ASVIS under Sinusoidal Excitation
4.2.2. ASVIS under Multi-Frequency Wave Excitation
- When the input frequency was lower than the natural frequency of the proposed system, the ASVIS with NSS reduced the excitation amplitude at each frequency component by more than 77.16%. On the contrary, the ASVIS without NSS increased the excitation amplitude to 102.41%.
- When the input frequency was higher than the natural frequency of the proposed system, the displacement response of the classical isolator without the NSS decreased by up to 68.15%, while the displacement of the ASVIS with NSS remarkably was reduces by 89.59%.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Griffin, M.J. Preface. In Handbook of Human Vibration; Griffin, M.J., Ed.; Academic Press: London, UK, 1990; pp. v–vii. [Google Scholar]
- Mansfield, N.J. Human Response to Vibration; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar] [CrossRef]
- Paddan, G.S.; Griffin, M.J. Evaluation of Whole-Body Vibration in Vehicles. J. Sound Vib. 2002, 253, 195–213. [Google Scholar] [CrossRef]
- Meng, X.; Tao, X.; Wang, W.; Zhang, C.; Cheng, B.; Wang, B.; Zhou, C.; Jin, X.; Zeng, C.; Cavanaugh, J.; et al. Effects of Sinusoidal Whole Body Vibration Frequency on Drivers’ Muscle Responses. SAE Tech. Pap. 2015, 1, 1396. [Google Scholar]
- Rivin, E.I. Passive Vibration Isolation; ASME Press: New York, NY, USA, 2003. [Google Scholar]
- Yang, J. Force transmissibility and vibration power flow behaviour of inerter-based vibration isolators. J. Phys. Conf. Ser. 2016, 744, 012234. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Jiang, J.Z.; Zhu, X.; Chen, H. Performance of a dual-stage inerter-based vibration isolator. Procedia Eng. 2017, 199, 1822–1827. [Google Scholar] [CrossRef]
- Karnovsky, I.A.; Lebed, E. Theory of Vibration Protection; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Alabuzhev, P.M.; Rivin, E.I. Vibration Protection and Measuring Systems with Quasi-Zero Stiffness; Taylor & Francis: Abingdon, UK, 1989. [Google Scholar]
- Platus, D. Negative-Stiffness-Mechanism Vibration Isolation Systems; SPIE Technical: OPTCON ‘91; SPIE: San Jose, CA, USA, 1992. [Google Scholar]
- Le, T.D.; Ahn, K.K. A vibration isolation system in low-frequency excitation region using negative stiffness structure for a vehicle seat. J. Sound Vib. 2011, 330, 6311–6335. [Google Scholar] [CrossRef]
- Danh, L.T.; Ahn, K.K. Active pneumatic vibration isolation system using negative stiffness structures for a vehicle seat. J. Sound Vib. 2014, 333, 1245–1268. [Google Scholar] [CrossRef]
- Yang, J.; Xiong, Y.P.; Xing, J.T. Dynamics and power flow behaviour of a nonlinear vibration isolation system with a negative stiffness mechanism. J. Sound Vib. 2013, 332, 167–183. [Google Scholar] [CrossRef]
- Shi, B.; Yang, J.; Li, T. Enhancing Vibration Isolation Performance by Exploiting Novel Spring-Bar Mechanism. Appl. Sci. 2021, 11, 8852. [Google Scholar] [CrossRef]
- Sun, M.; Dong, Z.; Song, G.; Sun, X.; Liu, W. A Vibration Isolation System Using the Negative Stiffness Corrector Formed by Cam-Roller Mechanisms with Quadratic Polynomial Trajectory. Appl. Sci. 2020, 10, 3573. [Google Scholar] [CrossRef]
- Yao, Y.; Li, H.; Li, Y.; Wang, X. Analytical and experimental investigation of a high-static-low-dynamic stiffness isolator with cam-roller-spring mechanism. Int. J. Mech. Sci. 2020, 186, 105888. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, X.; Luo, Y.; Yan, B.; Ma, C. Design and experiment of a high-static–low-dynamic stiffness isolator using a negative stiffness magnetic spring. J. Sound Vib. 2016, 360, 31–52. [Google Scholar] [CrossRef]
- Palomares, E.; Nieto, A.J.; Morales, A.L.; Chicharro, J.M.; Pintado, P. Numerical and experimental analysis of a vibration isolator equipped with a negative stiffness system. J. Sound Vib. 2018, 414, 31–42. [Google Scholar] [CrossRef]
- Carrella, A.; Brennan, M.J.; Waters, T.P. Static analysis of a passive vibration isolator with quasi-zero-stiffness characteristic. J. Sound Vib. 2007, 301, 678–689. [Google Scholar] [CrossRef]
- Lan, C.-C.; Yang, S.-A.; Wu, Y.-S. Design and experiment of a compact quasi-zero-stiffness isolator capable of a wide range of loads. J. Sound Vib. 2014, 333, 4843–4858. [Google Scholar] [CrossRef]
- Chang, Y.; Zhou, J.; Wang, K.; Xu, D. A quasi-zero-stiffness dynamic vibration absorber. J. Sound Vib. 2021, 494, 115859. [Google Scholar] [CrossRef]
- Liu, C.; Yu, K. Accurate modeling and analysis of a typical nonlinear vibration isolator with quasi-zero stiffness. Nonlinear Dyn. 2020, 100, 2141–2165. [Google Scholar] [CrossRef]
- Yang, J.; Jiang, J.Z.; Neild, S.A. Dynamic analysis and performance evaluation of nonlinear inerter-based vibration isolators. Nonlinear Dyn. 2019, 99, 1823–1839. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Wang, X.; Xu, D.; Bishop, S. Nonlinear dynamic characteristics of a quasi-zero stiffness vibration isolator with cam–roller–spring mechanisms. J. Sound Vib. 2015, 346, 53–69. [Google Scholar] [CrossRef]
- Ye, K.; Ji, J.C.; Brown, T. Design of a quasi-zero stiffness isolation system for supporting different loads. J. Sound Vib. 2020, 471, 115198. [Google Scholar] [CrossRef]
- Yuan, S.; Sun, Y.; Zhao, J.; Meng, K.; Wang, M.; Pu, H.; Peng, Y.; Luo, J.; Xie, S. A tunable quasi-zero stiffness isolator based on a linear electromagnetic spring. J. Sound Vib. 2020, 482, 115449. [Google Scholar] [CrossRef]
- Sun, X.; Jing, X.; Xu, J.; Cheng, L. Vibration isolation via a scissor-like structured platform. J. Sound Vib. 2014, 333, 2404–2420. [Google Scholar] [CrossRef]
- Sun, M.; Song, G.; Li, Y.; Huang, Z. Effect of negative stiffness mechanism in a vibration isolator with asymmetric and high-static-low-dynamic stiffness. Mech. Syst. Signal Process. 2019, 124, 388–407. [Google Scholar] [CrossRef]
- Wei, C.; Zhang, K.; Hu, C.; Wang, Y.; Taghavifar, H.; Jing, X. A tunable nonlinear vibrational energy harvesting system with scissor-like structure. Mech. Syst. Signal Process. 2019, 125, 202–214. [Google Scholar] [CrossRef]
- Quaglia, G.; Sorli, M. Air Suspension Dimensionless Analysis and Design Procedure. Veh. Syst. Dyn. 2001, 35, 443–475. [Google Scholar] [CrossRef]
- Lee, C.M.; Goverdovskiy, V.N.; Temnikov, A.I. Design of springs with “negative” stiffness to improve vehicle driver vibration isolation. J. Sound Vib. 2007, 302, 865–874. [Google Scholar] [CrossRef]
- Palomares, E.; Morales, A.L.; Nieto, A.J.; Chicharro, J.M.; Pintado, P. Improvement of Comfort in Suspension Seats with a Pneumatic Negative Stiffness System. Actuators 2020, 9, 126. [Google Scholar] [CrossRef]
- Qi, Z.; Li, F.; Yu, D. A three-dimensional coupled dynamics model of the air spring of a high-speed electric multiple unit train. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 231, 3–18. [Google Scholar] [CrossRef]
- Chen, J.-J.; Yin, Z.-H.; Rakheja, S.; He, J.-H.; Guo, K.-H. Theoretical modeling and experimental analysis of the vertical stiffness of a convoluted air spring including the effect of the stiffness of the bellows. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 232, 547–561. [Google Scholar] [CrossRef]
- Beater, P. “Pneumatic Drives”, System Design, Modelling and Control; Springer Nature: Cham, Switzerland, 2007; p. XIV, 324. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Valve | Unit |
|---|---|---|
| n | 1.4 | |
| T | 293 | K |
| 1.103 × 105 | Pa | |
| 3.77 × 105 | Pa | |
| 3.50 × 105 | Pa | |
| 200 | mm | |
| 80 | mm |
| Parameter | Valve | Unit |
|---|---|---|
| m | 150 | kg |
| a | 200 | mm |
| b | 200 | mm |
| 200 | mm | |
| 282.84 | mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, C.H.; Ho, C.M.; Ahn, K.K. An Air Spring Vibration Isolator Based on a Negative-Stiffness Structure for Vehicle Seat. Appl. Sci. 2021, 11, 11539. https://doi.org/10.3390/app112311539
Nguyen CH, Ho CM, Ahn KK. An Air Spring Vibration Isolator Based on a Negative-Stiffness Structure for Vehicle Seat. Applied Sciences. 2021; 11(23):11539. https://doi.org/10.3390/app112311539
Chicago/Turabian StyleNguyen, Cong Hung, Cong Minh Ho, and Kyoung Kwan Ahn. 2021. "An Air Spring Vibration Isolator Based on a Negative-Stiffness Structure for Vehicle Seat" Applied Sciences 11, no. 23: 11539. https://doi.org/10.3390/app112311539