
Trajectory Tracking Control of Intelligent Electric Vehicles Based on the Adaptive Spiral Sliding Mode

Abstract
:1. Introduction
2. Intelligent Vehicle Dynamics Model
2.1. Vehicle Dynamics Model
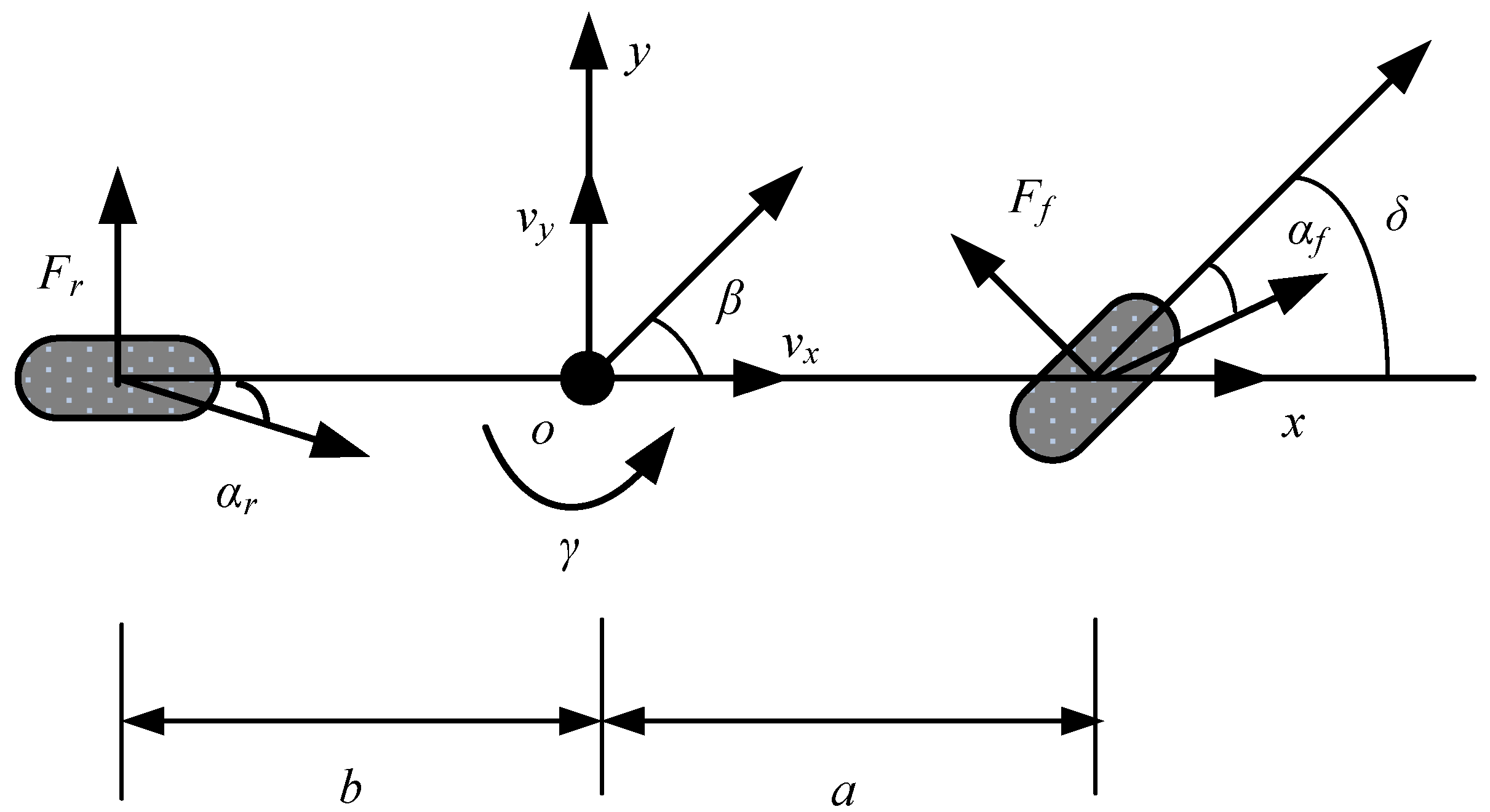
2.1.1. Three-Degrees-of-Freedom Vehicle Model
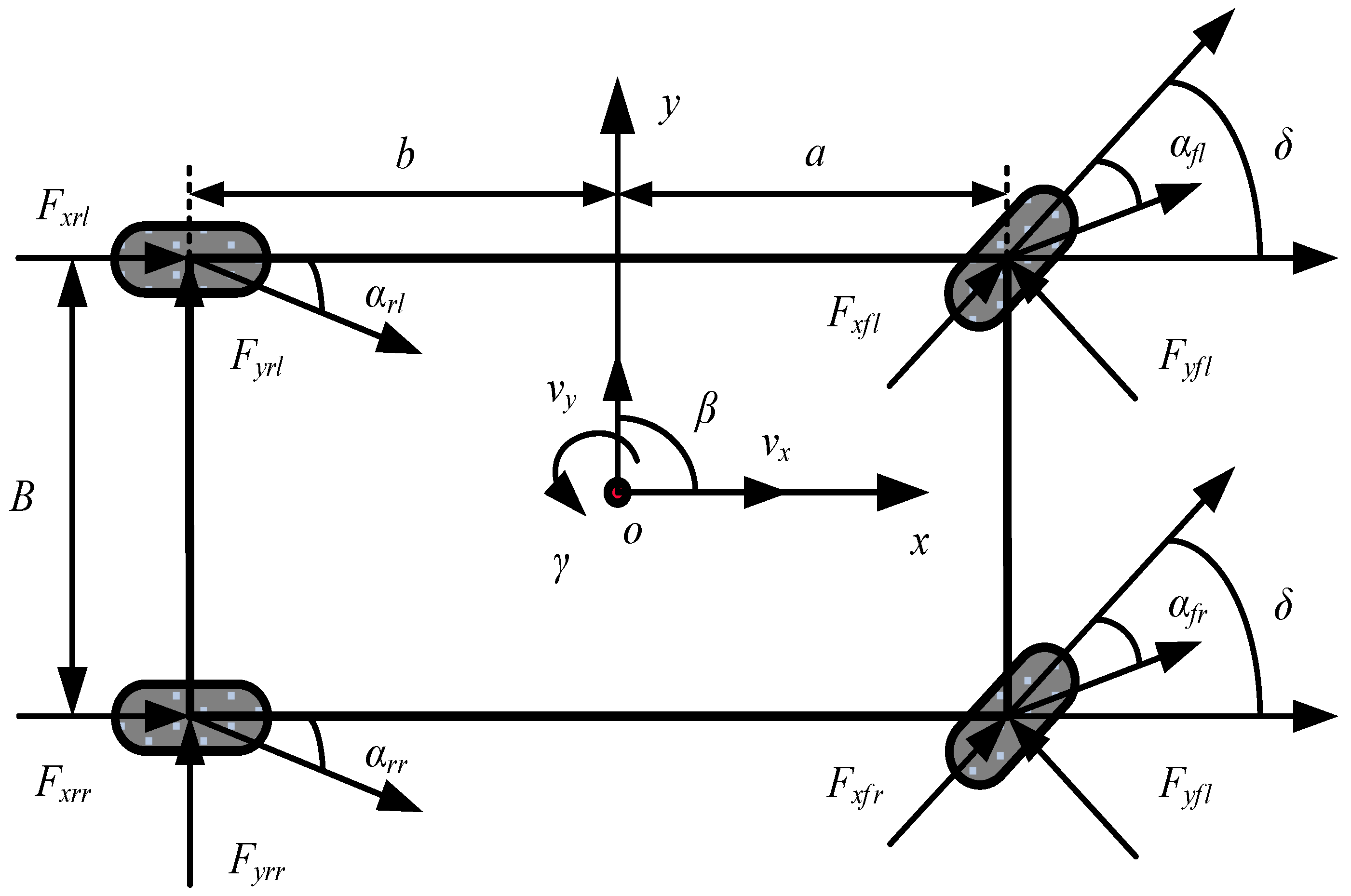
2.1.2. Seven-Degrees-of-Freedom Vehicle Model
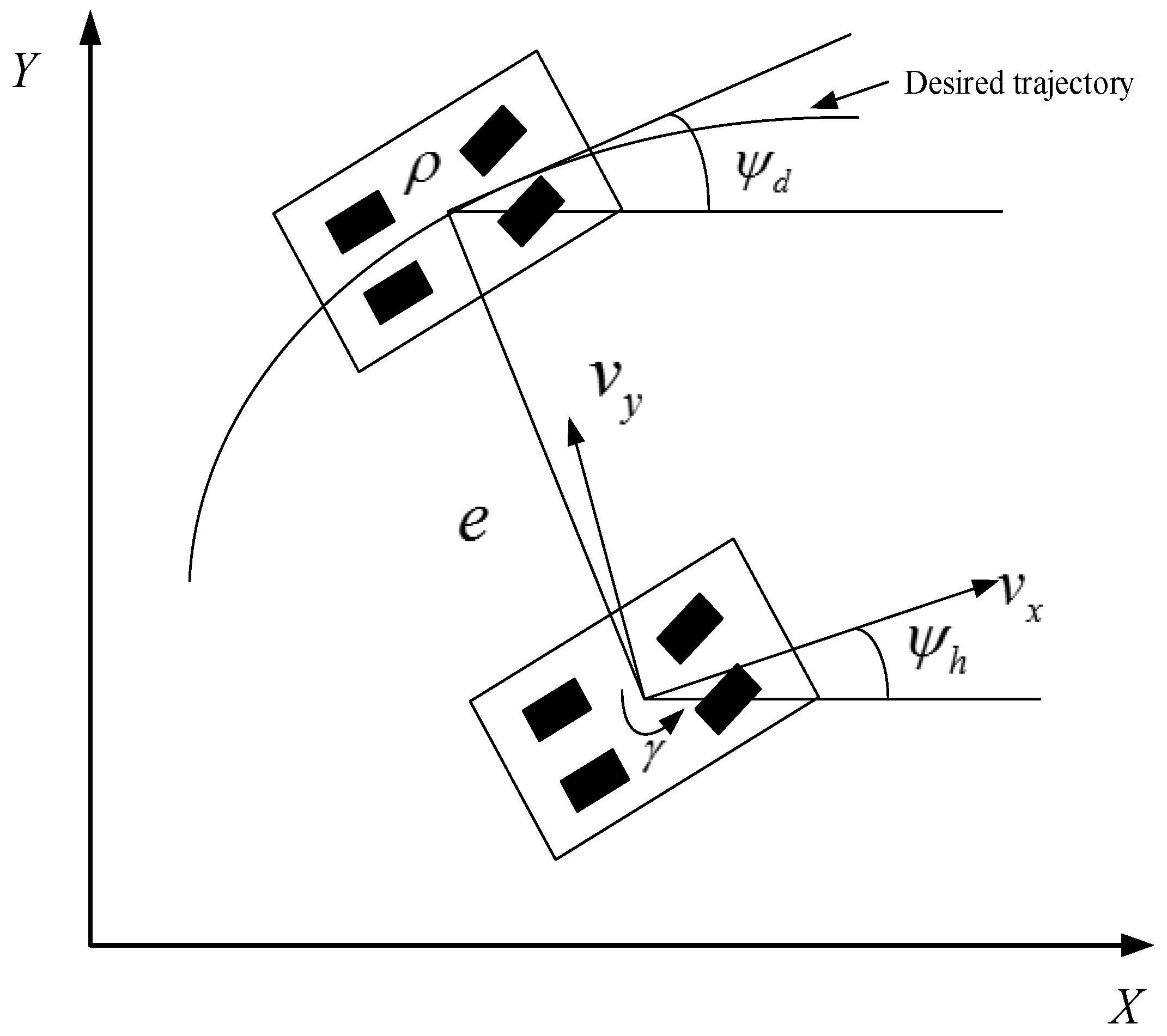
2.2. Trajectory Tracking Model
3. Control System Design
3.1. Problem Formulation
3.2. Upper Controller
3.2.1. Theoretical Basis of High-Order Sliding Mode Control
3.2.2. Definition of the High-Order Sliding Mode Control Algorithm
3.2.3. Actual Slip and Finite Time Convergence
3.2.4. Design of the Upper-Level Controller Based on the ASSM Algorithm
3.2.5. Stability Analysis of the Upper Controller
3.3. Design of Lower-Level Controller
4. Simulation Results
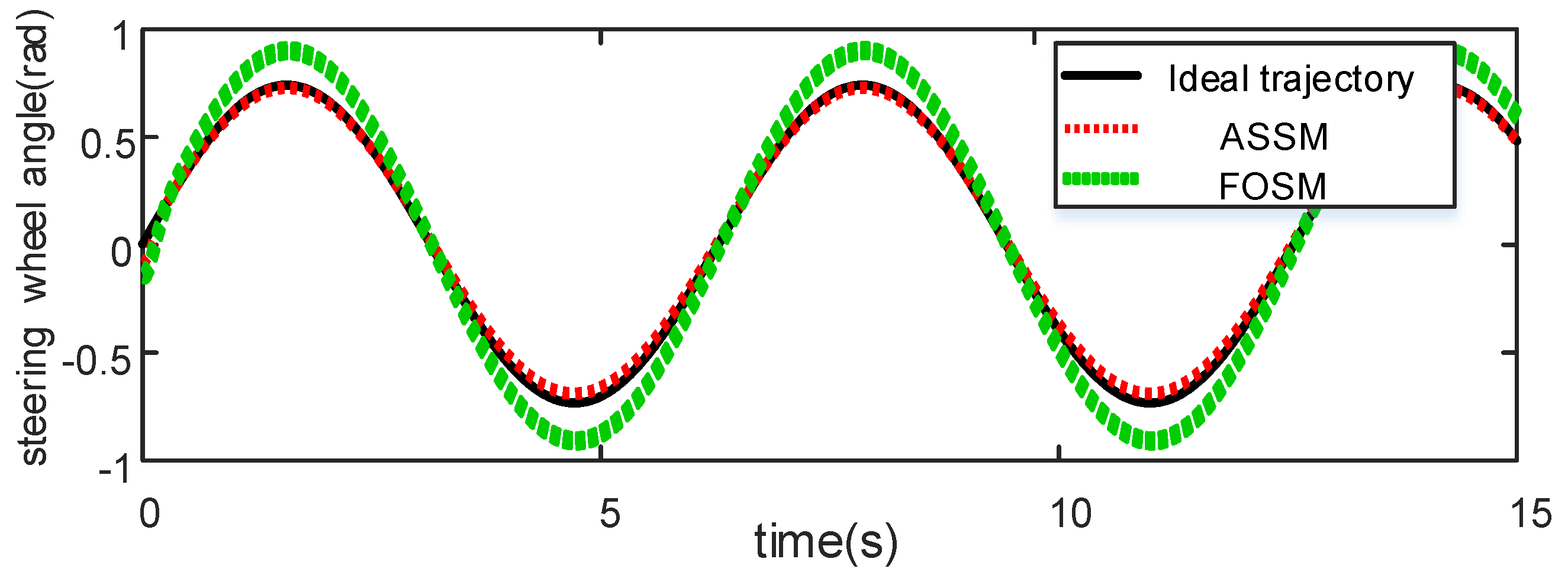
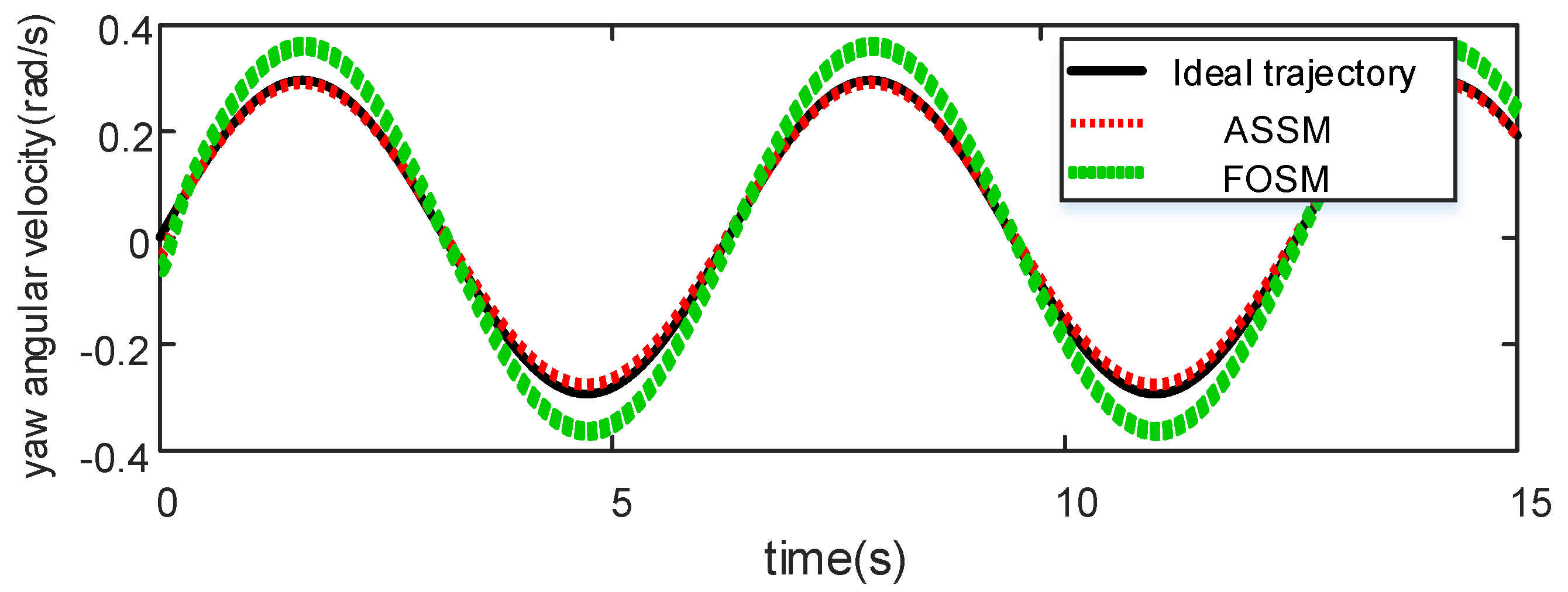
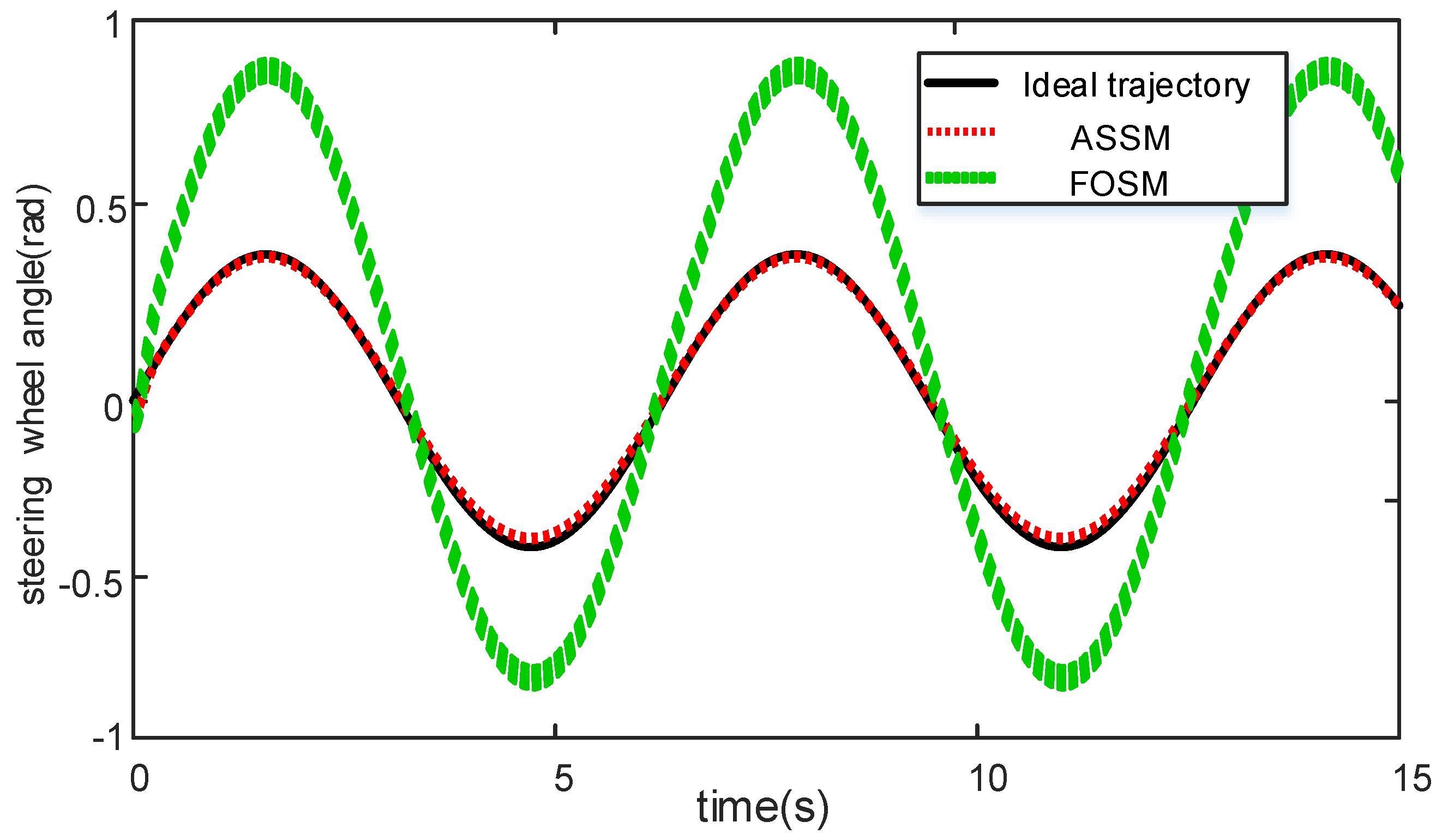
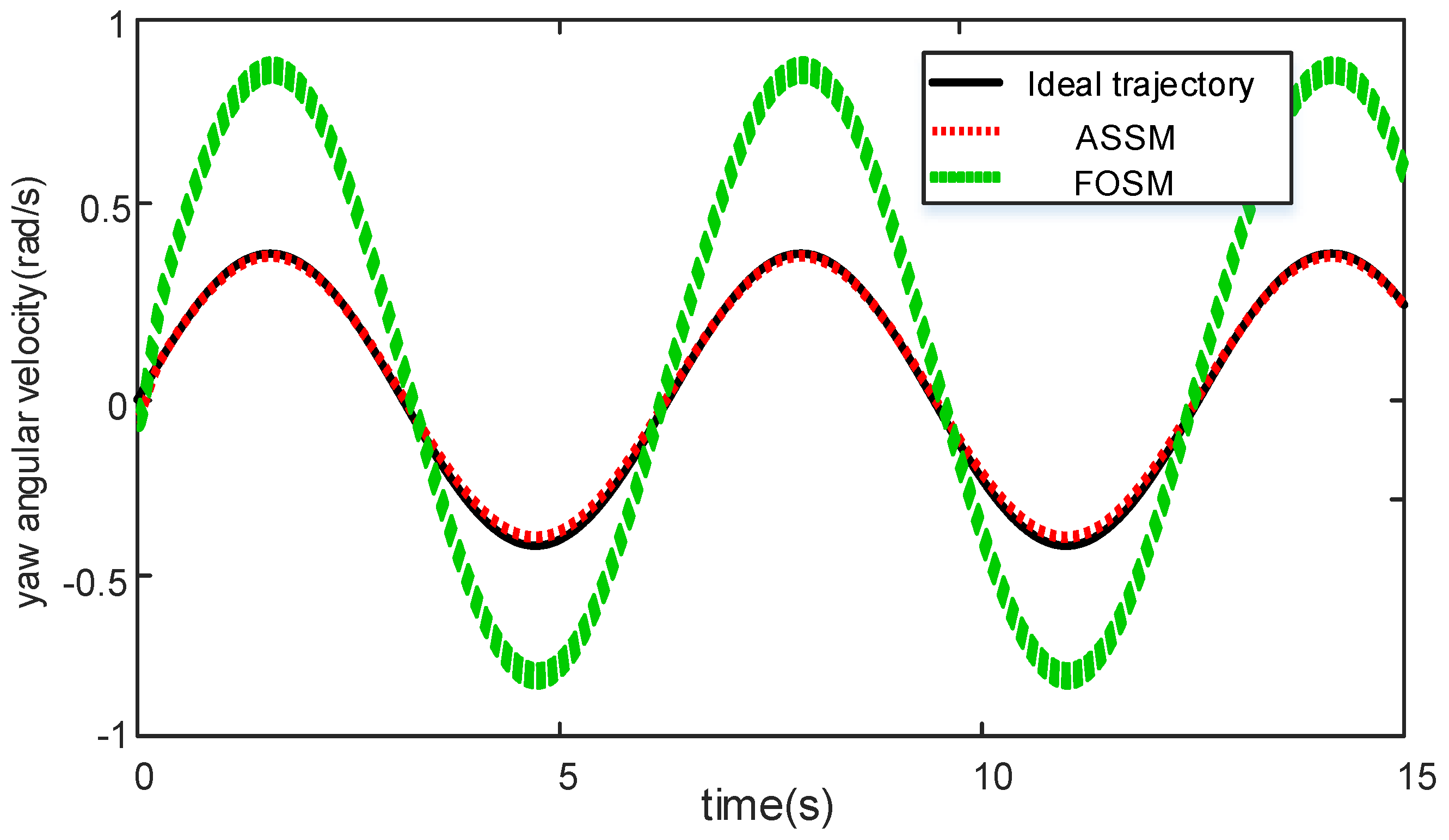
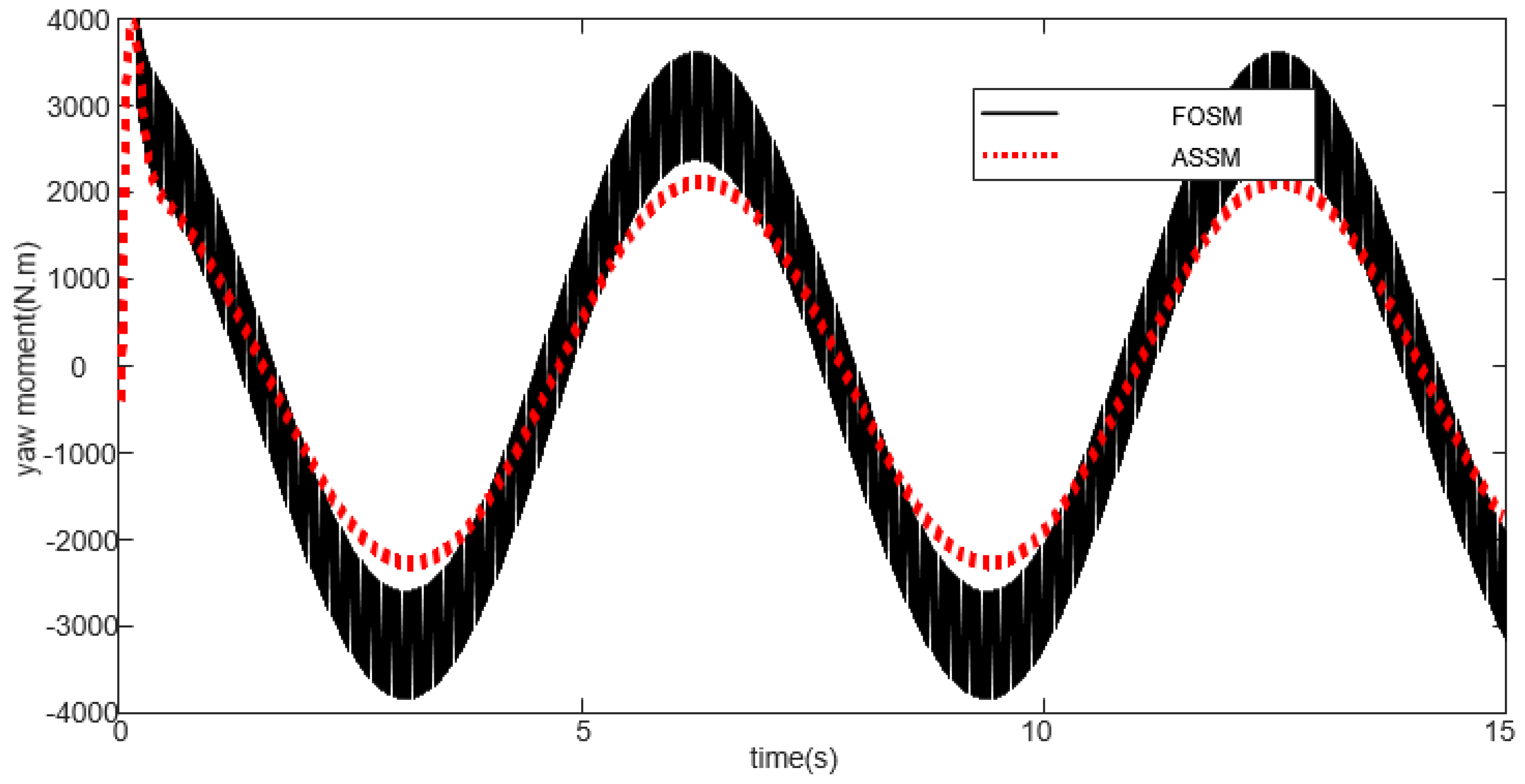
4.1. Slalom Condition 1: The Uniform Road Adhesion Coefficient μ = 0.85, and the Vehicle Speed Is 65 km/h
4.2. Slalom Condition 1: The Uniform Road Adhesion Coefficient μ = 0.3, and the Vehicle Speed Is 65 km/h
5. Conclusions
- The three-degrees-of-freedom and seven-degrees-of-freedom vehicle dynamics model and trajectory tracking model of the intelligent electric vehicle were established respectively, and were used as the basis for the design of vehicle path tracking and lateral stability controllers.
- A layered intelligent electric vehicle lateral stability controller was designed. The upper-level controller was designed based on the ASSM algorithm, and the stability of the upper-level controller was analyzed, and the stability conditions were obtained. The optimal longitudinal force distribution algorithm was proposed, based on which the lower-level controller was designed.
- A joint simulation model of CarSim and Simulink was built and a simulation experiment was carried out. The results show that the proposed vehicle coordinated control strategy can achieve accurate and rapid vehicle path tracking control effects, keep the lateral error in the path tracking process within a small range, and also ensure the lateral stability of the vehicle.
- It should be noted that the intelligent distributed drive electric vehicle model and road with a low adhesion coefficient in the slalom test are not real ones, but were simulated in experiments. Thus, the experimental platform does not completely match the real scenario at this stage. However, our control design and experimental validation are still valuable for industrial references. Our future work is to improve the experimental platform as a real intelligent distributed drive electric vehicle which can run on the road.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tan, D.K.; Chen, W.W.; Wang, H.B. On the use of Monte-Carlo simulation and deep fourier neural network in lane departure warning. IEEE Intell. Transp. Syst. Mag. 2017, 9, 76–90. [Google Scholar] [CrossRef]
- Cai, J.; Jiang, H.; Chen, L.; Liu, J.; Cai, Y.; Wang, J. Implementation and development of a trajectory tracking control system for intelligent vehicle. J. Intell. Robot. Syst. 2019, 94, 251–264. [Google Scholar] [CrossRef]
- Kayacan, E.; Chowdhary, G. Tracking error learning control for precise mobile robot path tracking in outdoor environment. J. Intell. Robot. Syst. 2019, 95, 975–986. [Google Scholar] [CrossRef]
- Wang, H.R.; Wang, Q.D.; Chen, W.W.; Zhao, L.F.; Tan, D.K. Path tracking based on model predictive control with variable predictive horizon. Trans. Inst. Meas. Control 2021, 43, 2676–2688. [Google Scholar] [CrossRef]
- Son, Y.S.; Kim, W.; Lee, S.-H.; Chung, C.C. Robust multirate control scheme with predictive virtual lanes for lane-keeping system of autonomous highway driving. IEEE Trans. Veh. Technol. 2015, 64, 3378–3391. [Google Scholar] [CrossRef]
- Li, B.Y.; Du, H.P.; Li, W.H. A potential field approach-based trajectory control for autonomous electric vehicles with in-wheel motors. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2044–2055. [Google Scholar] [CrossRef] [Green Version]
- Guo, H.; Liu, J.; Cao, D.; Chen, H.; Yu, R.; Lv, C. Dual-envelop-oriented moving horizon path tracking control for fully automated vehicles. Mechatronics 2018, 50, 422–433. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.R.; Jing, H.; Hu, C.; Yan, F.; Chen, N. Robust H∞ path following control for autonomous ground vehicles with delay and date dropout. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2042–2049. [Google Scholar] [CrossRef]
- Behrooz, M.; Pouyan, A.; Majid, M.; Mahmoodi-Kaleybar, M. Integrated robust controller for vehicle path following. Multibody Syst. Dyn. 2015, 33, 207–228. [Google Scholar]
- Cui, Q.J.; Ding, R.J.; Zhou, B.; Wu, X. Path-tracking of an autonomous vehicle via model predictive control and nonlinear filtering. Proc. IMechE Part D J. Automob. Eng. 2018, 232, 1237–1252. [Google Scholar] [CrossRef]
- Ding, S.; Levant, A.; Li, S. Simple homogeneous sliding-mode controller. Automatica 2016, 67, 22–32. [Google Scholar] [CrossRef]
- Ding, S.H.; Wang, J.D.; Zheng, W.X. Second-order sliding mode control for nonlinear uncertain systems bounded by positive functions. IEEE Trans. Ind. Electron. 2015, 62, 5899–5909. [Google Scholar] [CrossRef]
- Yang, J.; Chen, W.H.; Li, S.; Guo, L.; Yan, Y. Disturbance/uncertainty estimation and attenuation techniques in PMSM drives-A survey. IEEE Trans. Ind. Electron. 2016, 64, 3273–3285. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Wu, B.; Li, S.; Yu, X. Design and qualitative robustness analysis of a DOBC approach for DC-DC buck converters with unmatched circuit parameter perturbations. IEEE Trans. Circuits Syst. I-Regul. Pap. 2016, 63, 551–560. [Google Scholar] [CrossRef]
- Liu, J.; Vazquez, S.; Wu, L.; Marquez, A.; Gao, H.; Franquelo, L.G. Extended state observer based sliding mode control for three-phase power converters. IEEE Trans. Ind. Electron. 2017, 64, 22–31. [Google Scholar] [CrossRef] [Green Version]
- Levant, A.; Li, S.; Yu, X. Accuracy of some popular non-homogeneous 2-sliding modes. IEEE Trans. Autom. Control 2013, 58, 2615–2619. [Google Scholar] [CrossRef]
- Wu, L.; Su, X.; Shi, P. Sliding mode control with bounded L2 gain performance of Markovian jump singular time-delay systems. Automatica 2012, 48, 1929–1933. [Google Scholar] [CrossRef]
- Fridman, L. Chattering Analysis in sliding mode systems with inertial sensors. Int. J. Control 2003, 76, 906–912. [Google Scholar] [CrossRef]
- Ding, S.H.; Liu, L.; Zheng, W.X. Sliding Mode Direct Yaw-Moment Control Design for In-Wheel Electric Vehicles. IEEE Trans. Ind. Electron. 2017, 64, 22–31. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Dimension | Value |
|---|---|---|
| m | kg | 1296 |
| Iz | kg·m2 | 1750 |
| hg | m | 0.54 |
| a | m | 1.25 |
| b | m | 1.32 |
| B | m | 1.405 |
| r | m | 0.286 |
| Jw | kg·m2 | 0.8 |
| k1 | N/rad | 100,000 |
| k2 | N/rad | 100,000 |
| i | - | 20.4 |
| Parameter | Value |
|---|---|
| k | 1.3 |
| ω | 110 |
| θ | 180 |
| ρ | 6 |
| λ | 11 |
| αt | 18 |
| βt | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nie, Y.; Zhang, M.; Zhang, X. Trajectory Tracking Control of Intelligent Electric Vehicles Based on the Adaptive Spiral Sliding Mode. Appl. Sci. 2021, 11, 11739. https://doi.org/10.3390/app112411739
Nie Y, Zhang M, Zhang X. Trajectory Tracking Control of Intelligent Electric Vehicles Based on the Adaptive Spiral Sliding Mode. Applied Sciences. 2021; 11(24):11739. https://doi.org/10.3390/app112411739
Chicago/Turabian StyleNie, Yanxin, Minglu Zhang, and Xiaojun Zhang. 2021. "Trajectory Tracking Control of Intelligent Electric Vehicles Based on the Adaptive Spiral Sliding Mode" Applied Sciences 11, no. 24: 11739. https://doi.org/10.3390/app112411739
APA StyleNie, Y., Zhang, M., & Zhang, X. (2021). Trajectory Tracking Control of Intelligent Electric Vehicles Based on the Adaptive Spiral Sliding Mode. Applied Sciences, 11(24), 11739. https://doi.org/10.3390/app112411739