
Design of Optical Free-Form Surface Milling Machine Based on Mechanical Shunt and Dynamic Analysis


Abstract
:1. Introduction
2. Design of Optical Free-Form Surface Milling Machine
3. Function Description of Optical Free-Form Surface Milling Machine
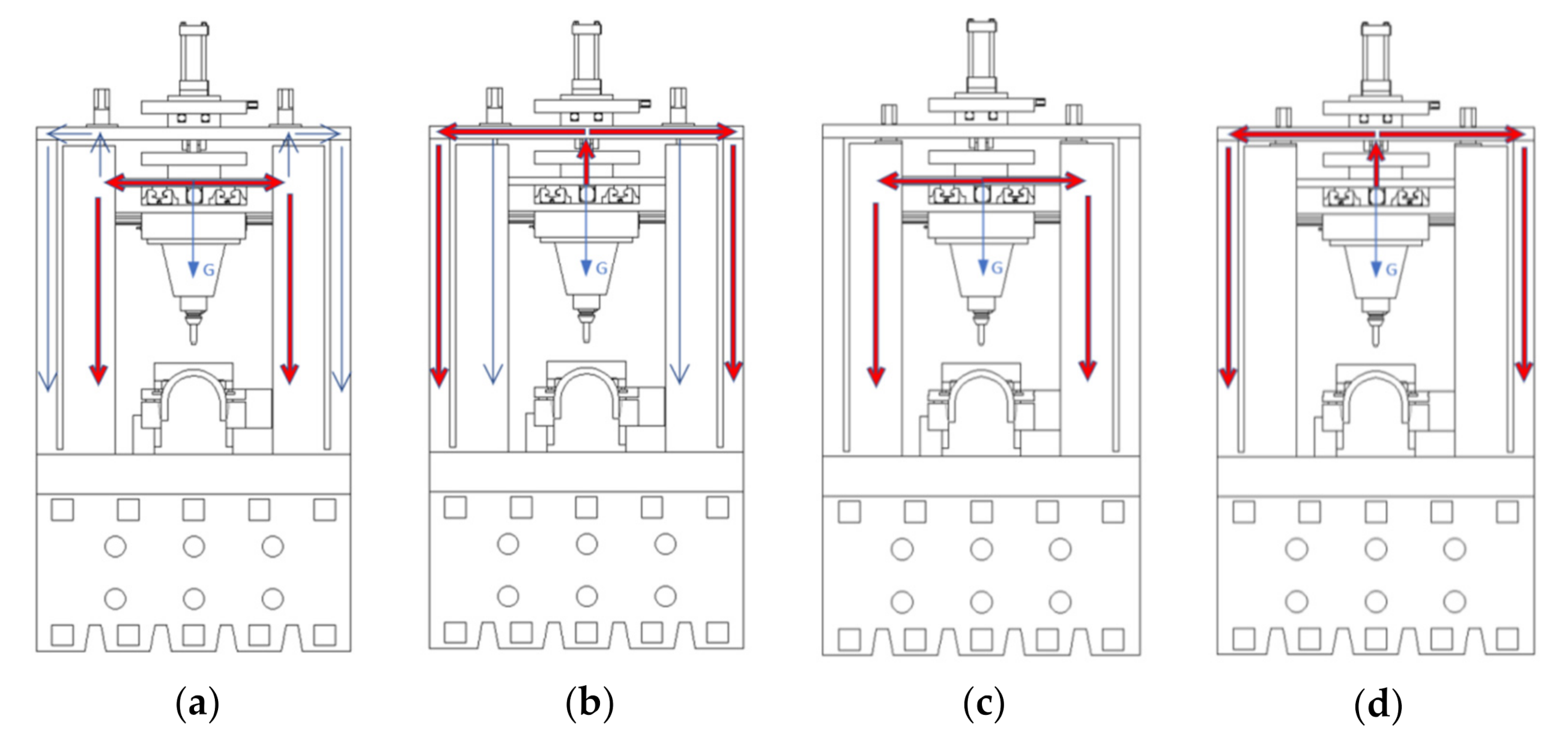
3.1. Features of Optical Free-Form Surface Milling Machine
3.2. Advantages of Optical Free-Form Surface Milling Machine
4. Establishment and Simulation of Virtual Prototype for Optical Free-Form Surface Milling Machine
4.1. ADAMS Dynamics Equation
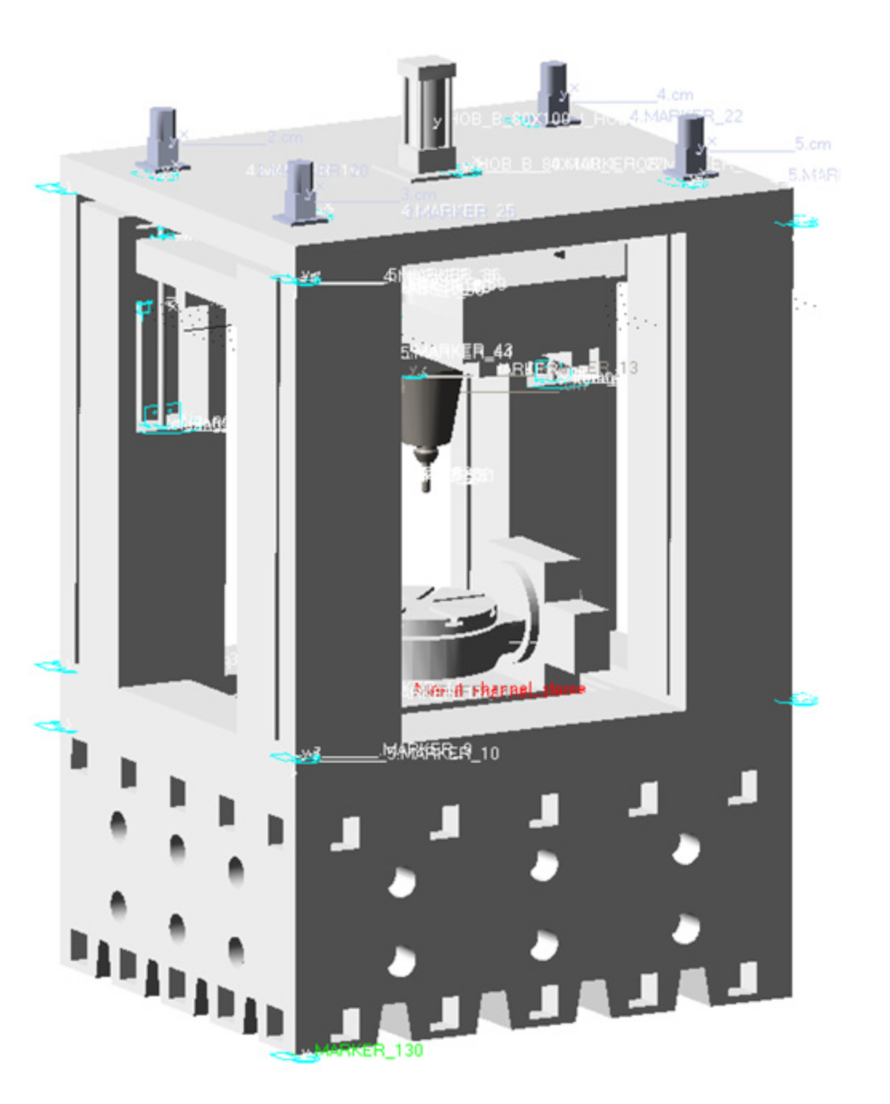
4.2. Virtual Prototype of Optical Free-Form Surface Milling Machine
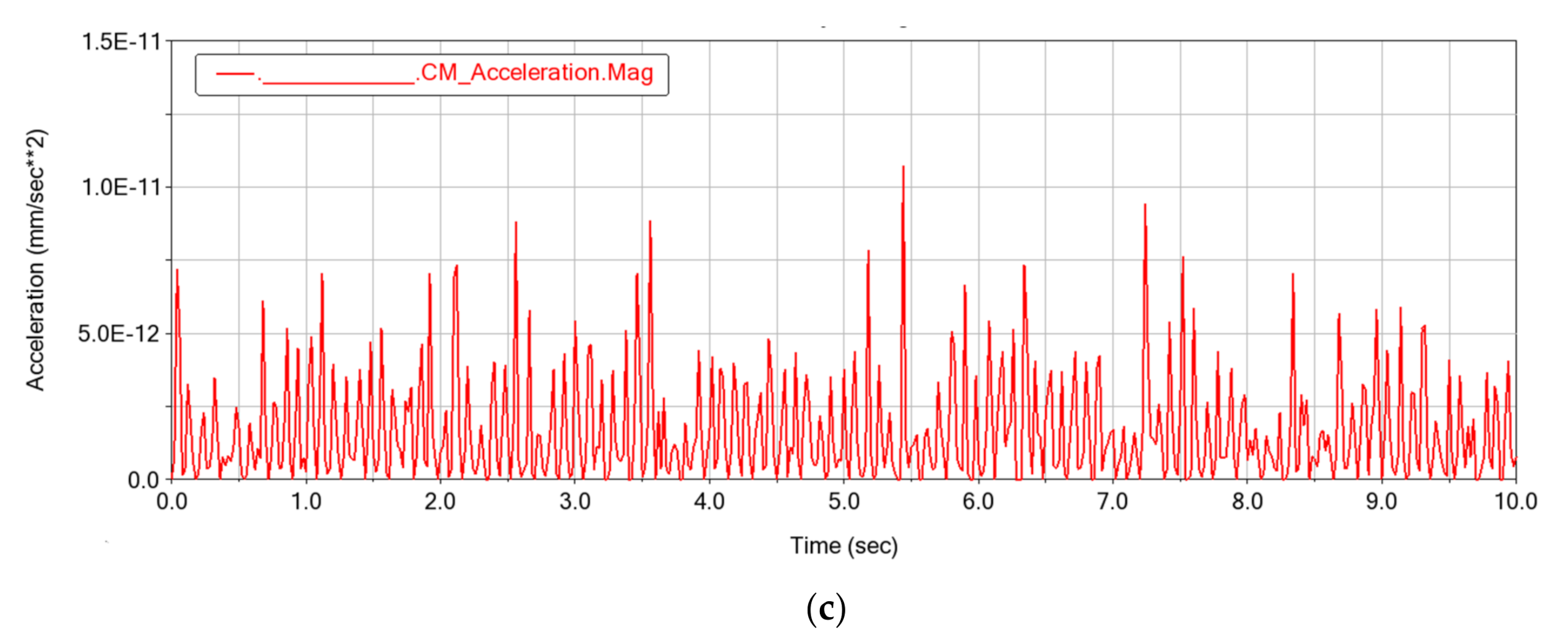
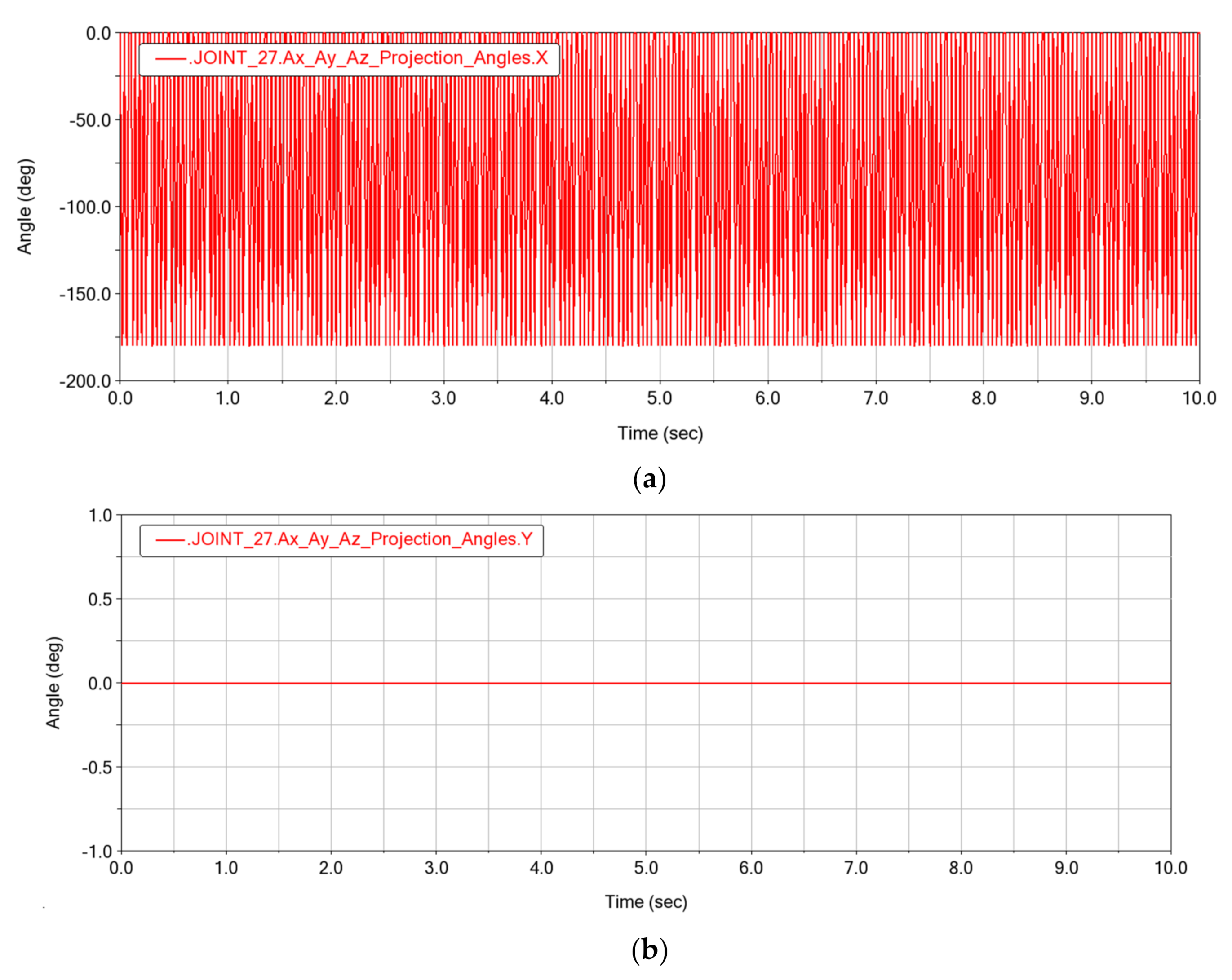
4.3. Virtual Simulation of Optical Free-Form Surface Milling Machine
5. Conclusions
- (1)
- An optical free-form surface milling machine is creatively designed (Patent No.: ZL 2020 1 0008995. 1), and a virtual prototype (VP) of the optical free-form surface milling machine is established based on the basic theory of rigid multibody dynamics (RMBD) and the basic theory of flexible multibody dynamics (FMBD). The dynamic simulation research on the optical free-form surface milling machine is carried out according to the comparison method. The results show that the simulation results of the rigid multibody dynamics model and the flexible multibody dynamics model are numerically consistent. The virtual prototype technology used in the design stage of machine tools can obtain more accurate dynamic characteristic information than traditional design methods of machine tools.
- (2)
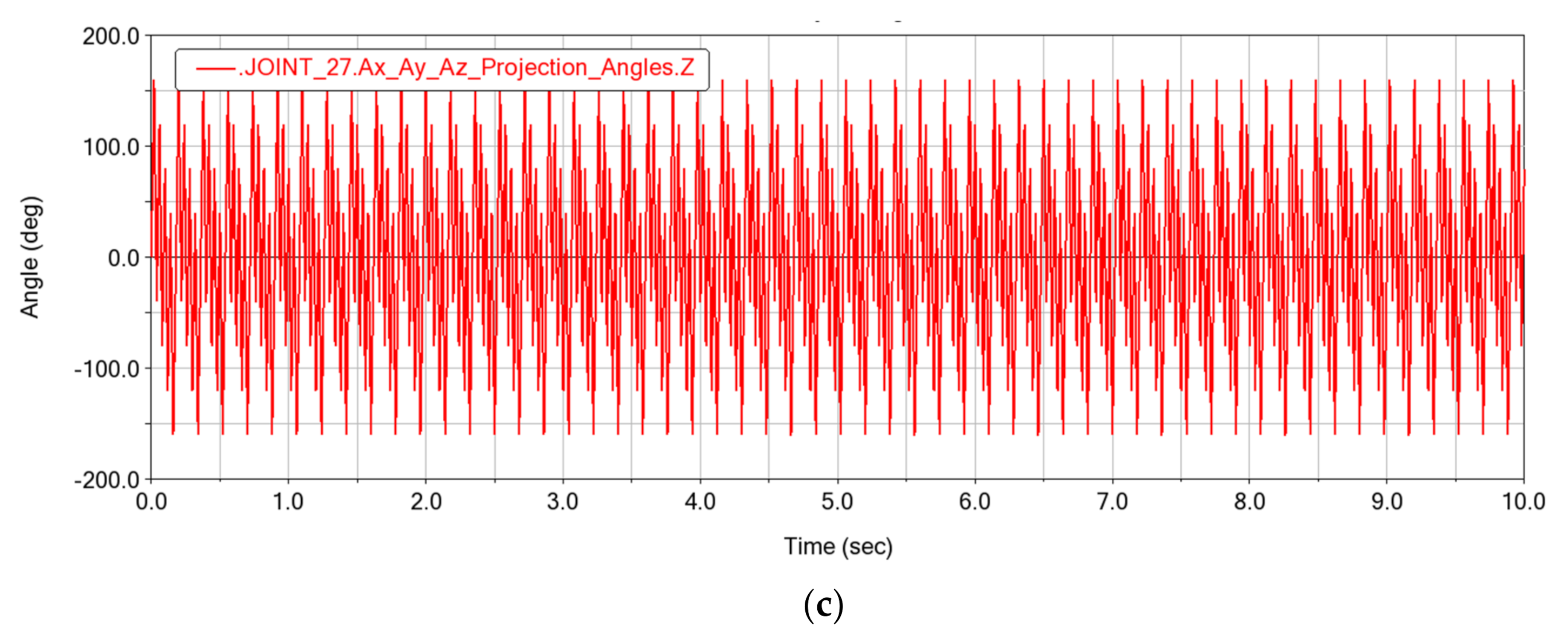
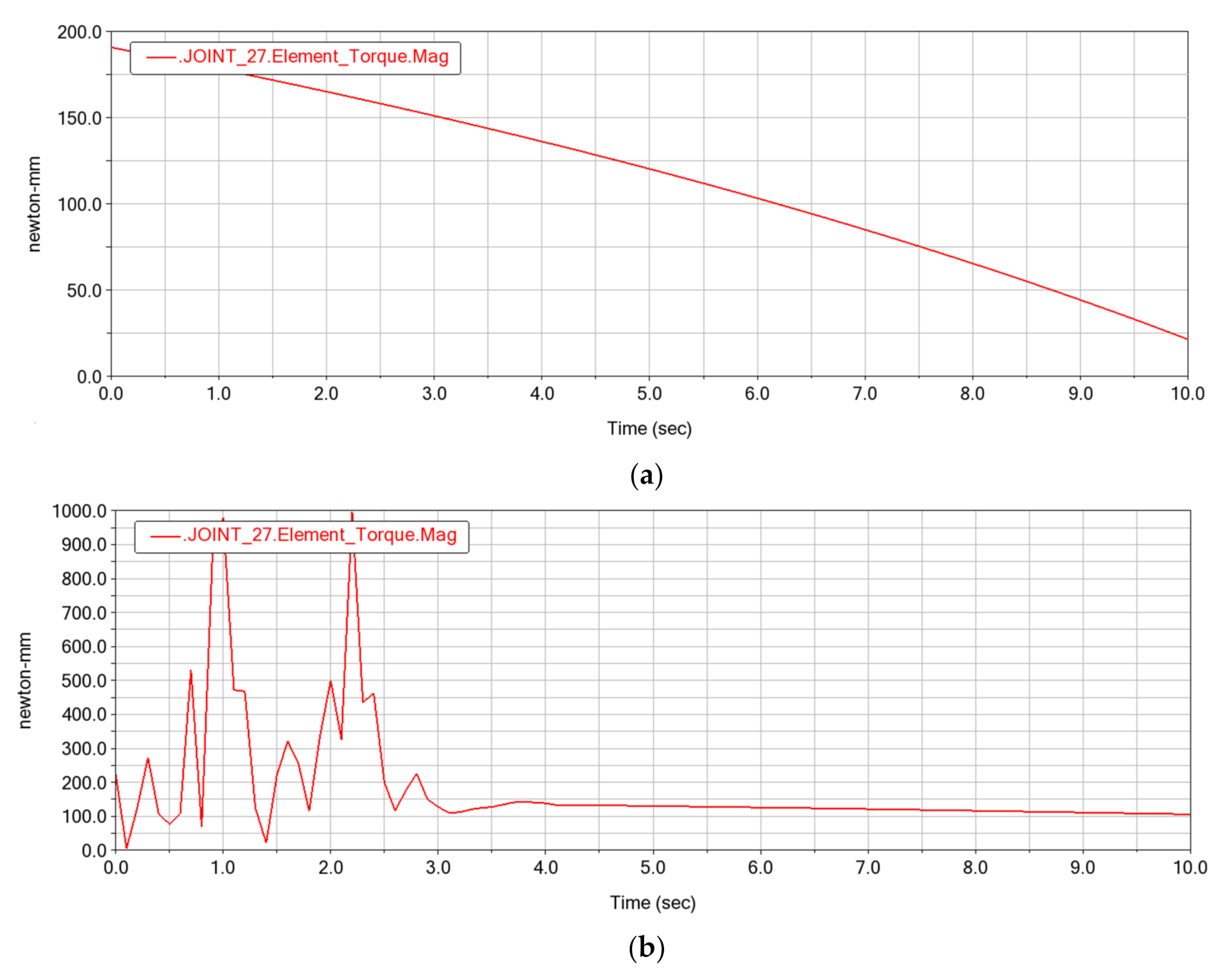
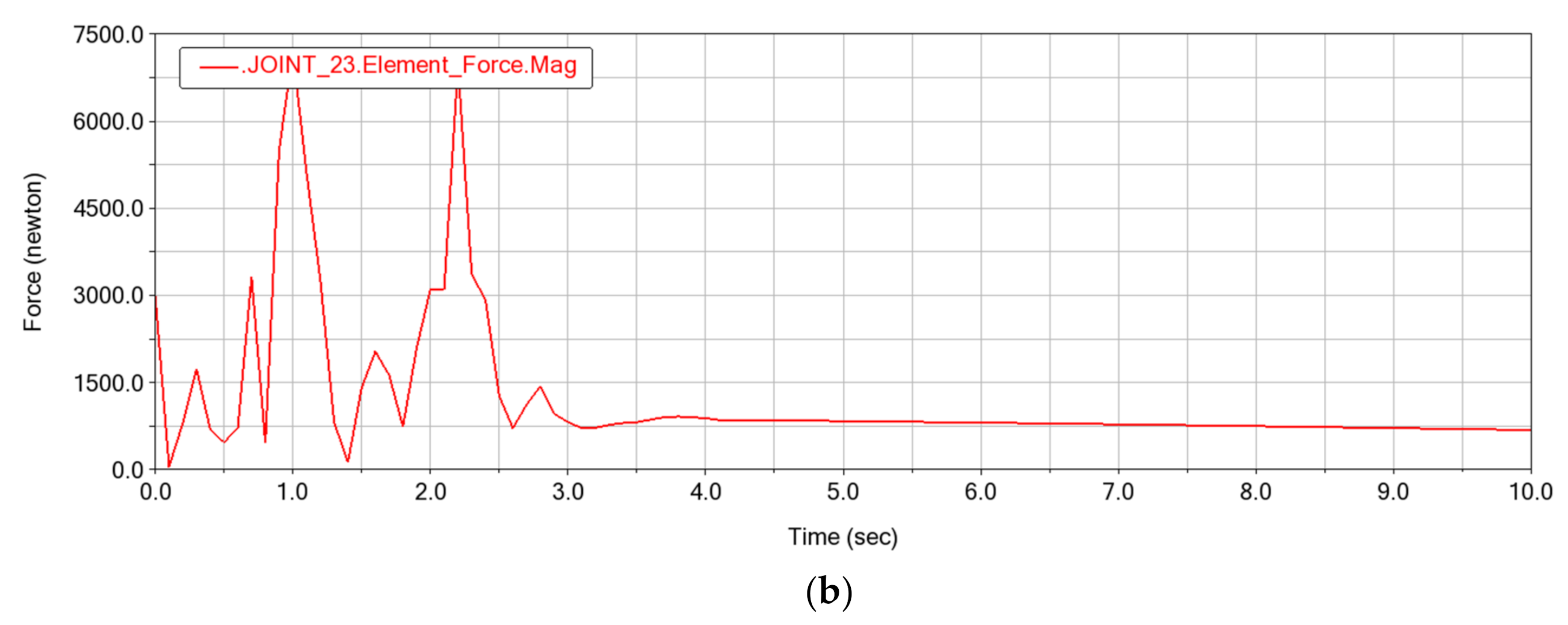
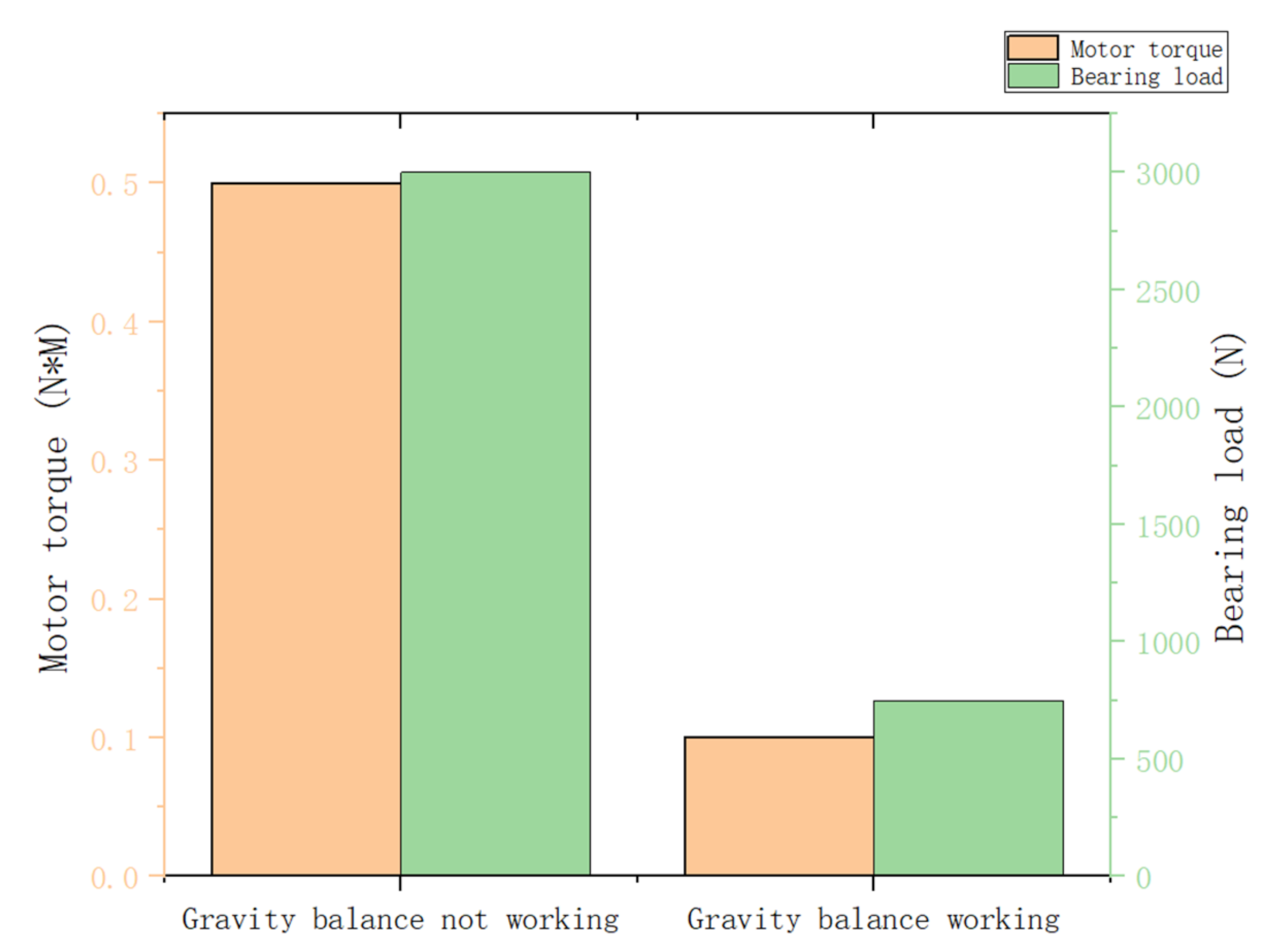
- The Z-axis characteristics of optical free-form surface milling machine is analyzed. The simulation results show that the Z-axis of the optical free-form surface milling machine has excellent dynamic characteristics. The Z-axis load can be reduced effectively and the load fluctuation range becomes more gentle when the gravity balance device is working. When the gravity balance device is not working, the average torque of Z-axis motor is 0.5 N·m, when the gravity balance device is working, the average torque of Z-axis motor is 0.1 N·m, and the average torque is reduced by 80%. When the gravity balance device is not working, the average force of Z-axis end bearing is 3000 N, when the gravity balance device is working, the average force of Z-axis end bearing is 750 N and the average force is reduced by 75%. Therefore, the gravity balance device can suppress the load fluctuation of Z-axis and obviously improve the efficiency of the milling machine.
- (3)
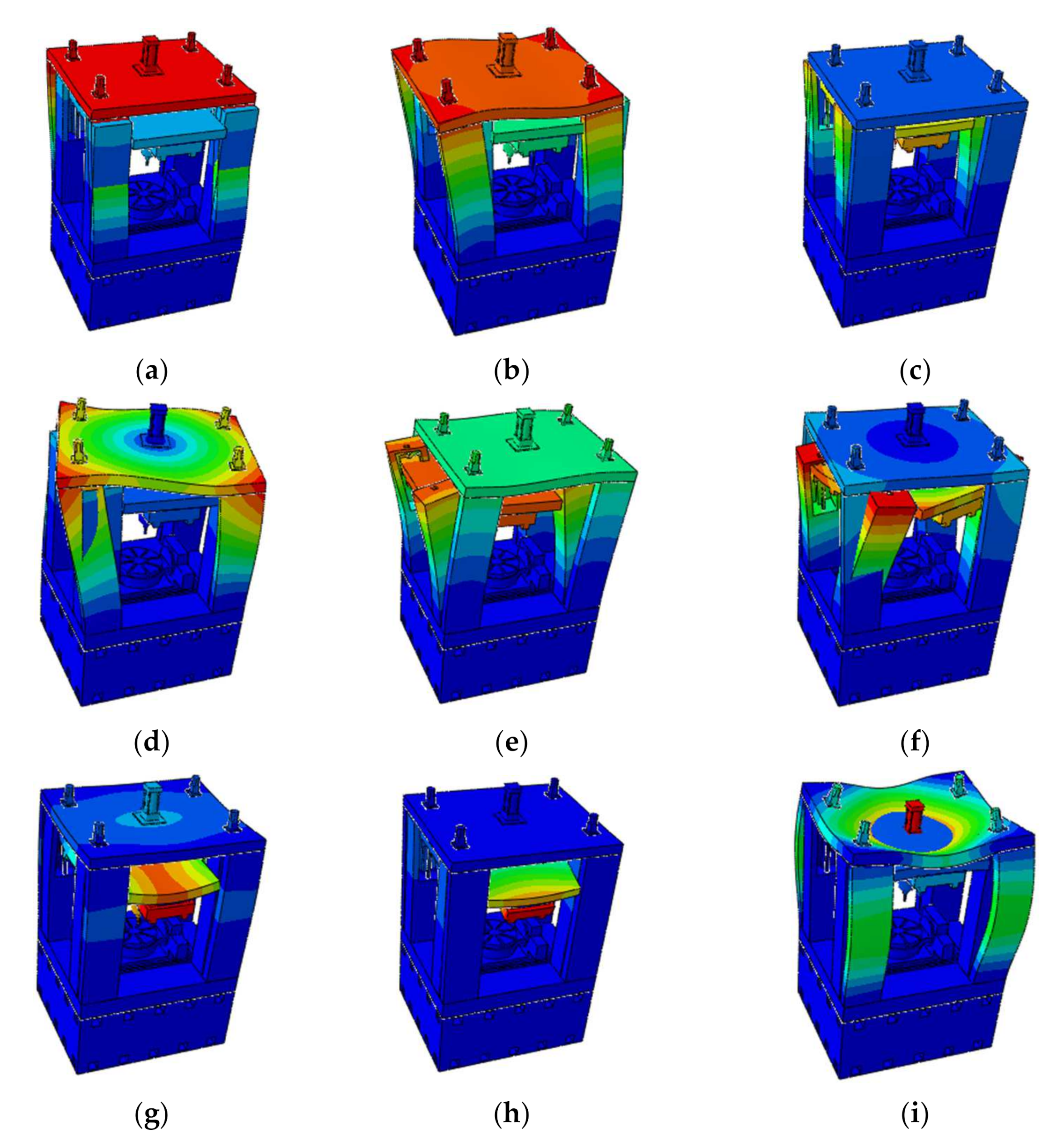
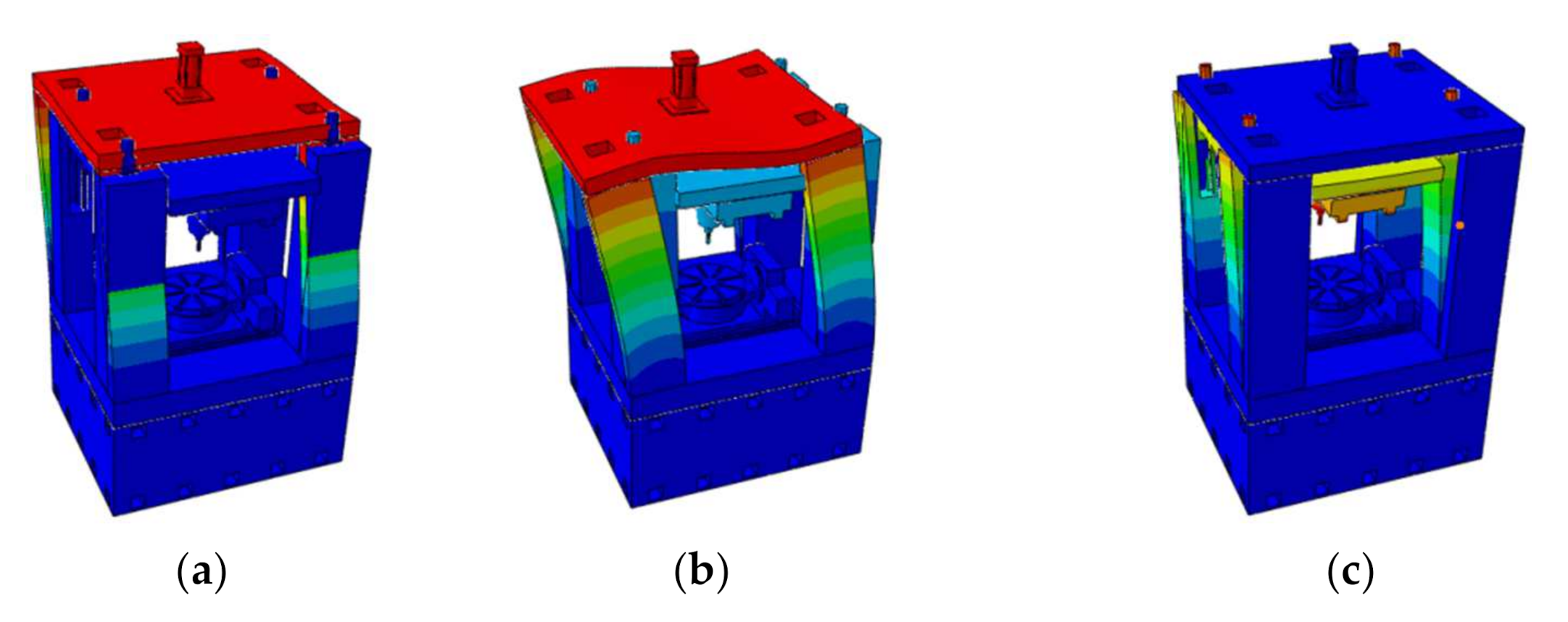
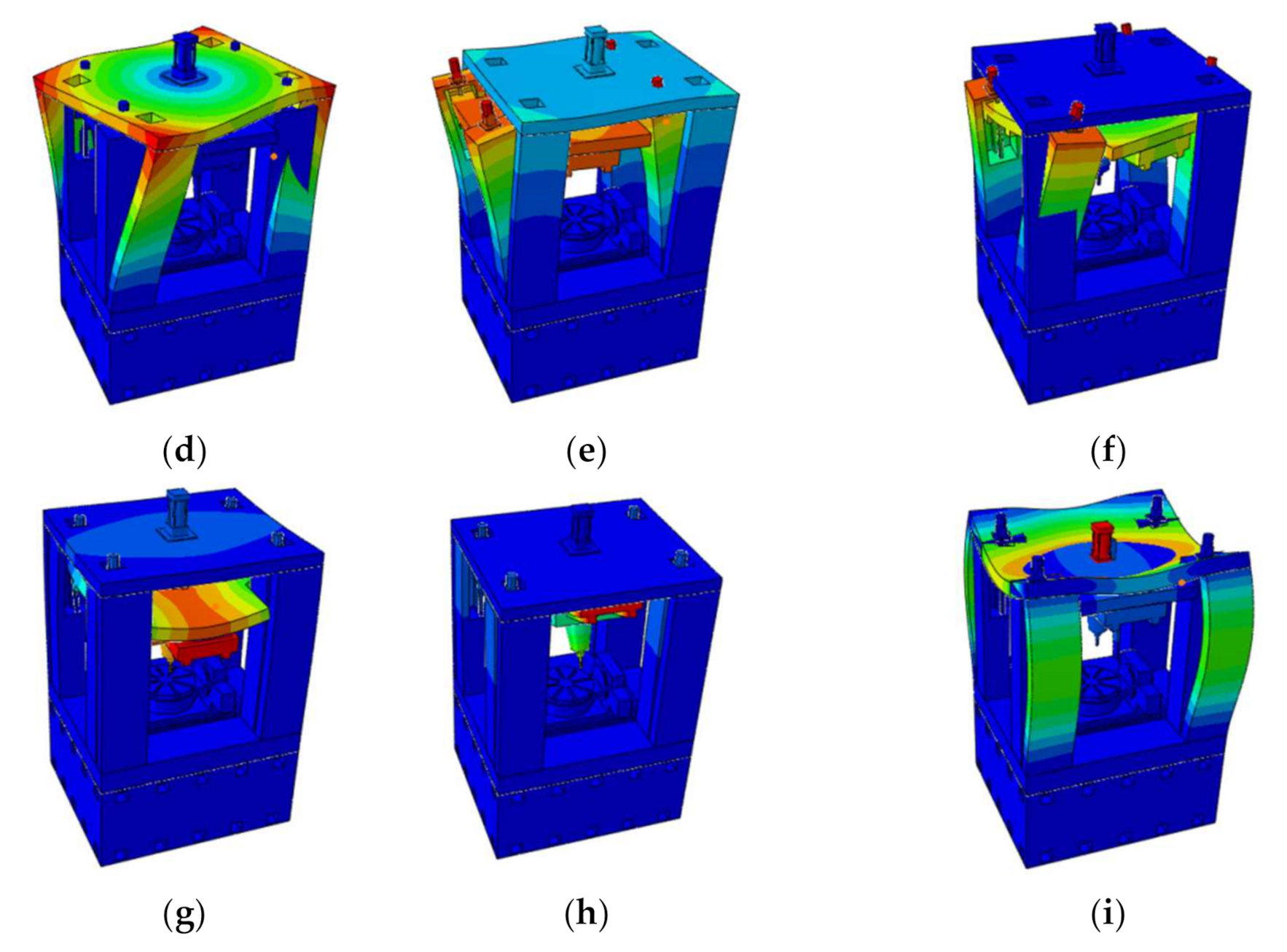
- The natural frequencies of optical free-form surface milling machine adopting different structural schemes and material schemes are analyzed. The simulation results show that the first vibration mode of the milling machine affecting manufacturing precision is the third order, and the optimal dynamic characteristic design scheme is that the Z-axis motor is installed on the roof and the structure material is natural granite; the first natural frequency of milling machine affecting manufacturing precision is 68 HZ. The structure material using natural granite compared with cast iron can significantly improve the dynamic characteristics of the machine tool.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Möhring, H.C.; Brecher, C.; Abele, E.; Fleischer, J.; Bleicher, F. Materials in machine tool structures. CIRP Ann. Manuf. Technol. 2015, 64, 725–748. [Google Scholar] [CrossRef]
- Liu, S. Multi-objective optimization design method for the machine tool’s structural parts based on computer-aided engineering. Int. J. Adv. Manuf. Technol. 2015, 78, 1053–1065. [Google Scholar] [CrossRef]
- Shi, Y.; Zhao, X.; Zhang, H.; Nie, Y.; Zhang, D. A new top-down design method for the stiffness of precision machine tools. Int. J. Adv. Manuf. Technol. 2016, 83, 1887–1904. [Google Scholar] [CrossRef]
- Wojciechowski, S.; Mrozek, K. Mechanical and technological aspects of micro ball end milling with various tool inclinations. Int. J. Mech. Sci. 2017, 134, 424–435. [Google Scholar] [CrossRef]
- Gomez-Acedo, E.; Olarra, A.; Orive, J.; Lopez de la Calle, L.N. Methodology for the design of a thermal distortion compensation for large machine tools based in state-space representation with Kalman filter. Int. J. Mach. Tools Manuf. 2013, 75, 100–108. [Google Scholar] [CrossRef]
- Gomez-Acedo, E.; Olarra, A.; Lopez de la Calle, L.N. A method for thermal characterization and modeling of large gantry-type machine tools. Int. J. Adv. Manuf. Technol. 2012, 62, 875–886. [Google Scholar] [CrossRef]
- Wojciechowski, S.; Wiackiewicz, M.; Krolczyk, G.M. Study on metrological relations between instant tool displacements and surface roughness during precise ball end milling. Meas. J. Int. Meas. Confed. 2018, 129, 686–694. [Google Scholar] [CrossRef]
- Abdul Kadir, A.; Xu, X.; Hämmerle, E. Virtual machine tools and virtual machining-A technological review. Robot. Comput. Integr. Manuf. 2011, 27, 494–508. [Google Scholar] [CrossRef] [Green Version]
- Ding, W.Z.; Huang, X.D.; Wang, M.L.; Zhu, S.Q. An approach to evaluate the effects of nonlinear traveling joints on dynamic behavior of large machine tools. Int. J. Adv. Manuf. Technol. 2013, 68, 2025–2032. [Google Scholar] [CrossRef] [Green Version]
- Doman, D.A.; Warkentin, A.; Bauer, R. Finite element modeling approaches in grinding. Int. J. Mach. Tools Manuf. 2009, 49, 109–116. [Google Scholar] [CrossRef]
- Bais, R.S.; Gupta, A.K.; Nakra, B.C.; Kundra, T.K. Studies in dynamic design of drilling machine using updated finite element models. Mech. Mach. Theory 2004, 39, 1307–1320. [Google Scholar] [CrossRef]
- Ford, D.G.; Widiyarto, M.H.N.; Myers, A.; Longstaff, A.P.; Fletcher, S. Structural analysis and characterisation technique applied to a CNC vertical machining centre. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2014, 228, 2357–2371. [Google Scholar] [CrossRef] [Green Version]
- Liang, Y.; Chen, W.; Bai, Q.; Sun, Y.; Chen, G.; Zhang, Q.; Sun, Y. Design and dynamic optimization of an ultraprecision diamond flycutting machine tool for large KDP crystal machining. Int. J. Adv. Manuf. Technol. 2013, 69, 237–244. [Google Scholar] [CrossRef]
- Huo, D.; Cheng, K.; Wardle, F. Design of a five-axis ultra-precision micro-milling machine-UltraMill. Part 2: Integrated dynamic modelling, design optimisation and analysis. Int. J. Adv. Manuf. Technol. 2010, 47, 879–890. [Google Scholar] [CrossRef] [Green Version]
- Aurich, J.C.; Biermann, D.; Blum, H.; Brecher, C.; Carstensen, C.; Denkena, B.; Klocke, F.; Kröger, M.; Steinmann, P.; Weinert, K. Modelling and simulation of process: Machine interaction in grinding. Prod. Eng. 2009, 3, 111–120. [Google Scholar] [CrossRef]
- Fleischer, J.; Munzinger, C.; Tröndle, M. Simulation and optimization of complete mechanical behaviour of machine tools. Prod. Eng. 2008, 2, 85–90. [Google Scholar] [CrossRef]
- Brecher, C.; Witt, S. Simulation of machine process interaction with flexible multi-body simulation. In Proceedings of the 9th CIRP International Workshop on Modeling of Machining Operations, Bled, Slovenia, 11–12 May 2006. [Google Scholar]
- Cano, T.; Chapelle, F.; Lavest, J.M.; Ray, P. A new approach to identifying the elastic behaviour of a manufacturing machine. Int. J. Mach. Tools Manuf. 2008, 48, 1569–1577. [Google Scholar] [CrossRef]
- Zhang, G.P.; Huang, Y.M.; Shi, W.H.; Fu, W.P. Predicting dynamic behaviours of a whole machine tool structure based on computer-aided engineering. Int. J. Mach. Tools Manuf. 2003, 43, 699–706. [Google Scholar] [CrossRef]
- Renton, D.; Elbestawi, M.A. Motion control for linear motor feed drives in advanced machine tools. Int. J. Mach. Tools Manuf. 2001, 41, 479–507. [Google Scholar] [CrossRef]
- Zaeh, M.; Siedl, D. A new method for simulation of machining performance by integrating finite element and multi-body simulation for machine tools. CIRP Ann. Manuf. Technol. 2007, 56, 383–386. [Google Scholar] [CrossRef]
- Hijink, J.A.W.; van der Wolf, A.C.H. Analysis of a milling machine: Computed results versus experimental data. In Proceedings of the Fourteenth International Machine Tool Design and Research Conference; Macmillan International Higher Education: London, UK, 1974; pp. 553–558. [Google Scholar] [CrossRef] [Green Version]
- Mustafina, R.M.; Plotnikov, I.A.; Plotnikova, I.V.; Tchaikovskaya, O.N. Choice of parameters and stability of nonlinear vibration isolation device. J. Phys. Conf. Ser. 2016, 671, 012046. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | Structural Schemes | Material Schemes | Frequency (HZ) | Mode |
|---|---|---|---|---|
| 1 | Z-axis motor is installed on the roof | Cast iron | 28.93 | The external frame of milling machine swingsaround the Y-axis |
| Natural granite | 34.445 | |||
| Z-axis motor is installed on the column | Cast iron | 24.237 | ||
| Natural granite | 26.011 | |||
| 2 | Z-axis motor is installed on the roof | Cast iron | 57.651 | The external frame of milling machine swingsaround the X-axis |
| Natural granite | 63.086 | |||
| Z-axis motor is installed on the column | Cast iron | 57.027 | ||
| Natural granite | 61.171 | |||
| 3 | Z-axis motor is installed on the roof | Cast iron | 61.382 | The internal frame of milling machine swingsaround Y-axis |
| Natural granite | 68.173 | |||
| Z-axis motor is installed on the column | Cast iron | 58.306 | ||
| Natural granite | 62.119 | |||
| 4 | Z-axis motor is installed on the roof | Cast iron | 64.686 | Torsional vibration of milling machine external frame around Z-axis |
| Natural granite | 73.179 | |||
| Z-axis motor is installed on the column | Cast iron | 63.457 | ||
| Natural granite | 70.952 | |||
| 5 | Z-axis motor is installed on the roof | Cast iron | 75.199 | The internal frame of milling machine swingsaround the X-axis |
| Natural granite | 83.764 | |||
| Z-axis motor is installed on the column | Cast iron | 72.21 | ||
| Natural granite | 76.863 | |||
| 6 | Z-axis motor is installed on the roof | Cast iron | 96.653 | Torsional vibration of milling machine internal frame around Z-axis |
| Natural granite | 108.8 | |||
| Z-axis motor is installed on the column | Cast iron | 92.83 | ||
| Natural granite | 99.533 | |||
| 7 | Z-axis motor is installed on the roof | Cast iron | 109.11 | The slide carriage and its mounting parts vibratein Z-axis direction |
| Natural granite | 119.29 | |||
| Z-axis motor is installed on the column | Cast iron | 109.45 | ||
| Natural granite | 119.9 | |||
| 8 | Z-axis motor is installed on the roof | Cast iron | 113.41 | The slide carriage and its mounting parts swingaround the Y-axis |
| Natural granite | 129.55 | |||
| Z-axis motor is installed on the column | Cast iron | 113.21 | ||
| Natural granite | 123.5 | |||
| 9 | Z-axis motor is installed on the roof | Cast iron | 150.79 | The external frame of milling machine vibratesin Z-axis direction |
| Natural granite | 168.73 | |||
| Z-axis motor is installed on the column | Cast iron | 118.75 | ||
| Natural granite | 129.17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; Yu, T.; Wang, Z.; Wang, W. Design of Optical Free-Form Surface Milling Machine Based on Mechanical Shunt and Dynamic Analysis. Appl. Sci. 2021, 11, 11764. https://doi.org/10.3390/app112411764
Li Q, Yu T, Wang Z, Wang W. Design of Optical Free-Form Surface Milling Machine Based on Mechanical Shunt and Dynamic Analysis. Applied Sciences. 2021; 11(24):11764. https://doi.org/10.3390/app112411764
Chicago/Turabian StyleLi, Qi, Tianbiao Yu, Zixuan Wang, and Wanshan Wang. 2021. "Design of Optical Free-Form Surface Milling Machine Based on Mechanical Shunt and Dynamic Analysis" Applied Sciences 11, no. 24: 11764. https://doi.org/10.3390/app112411764