
Spatiotemporal Monitoring and Evaluation Method for Sand-Filling of Immersed Tube Tunnel Foundation

Abstract
:1. Introduction
2. Elastic Wave Monitoring for Sand-Filling of Immersed Tube Tunnel
2.1. Elastic Wave Monitoring Method
- Time domain analysis
- 2.
- Frequency domain analysis
- 3.
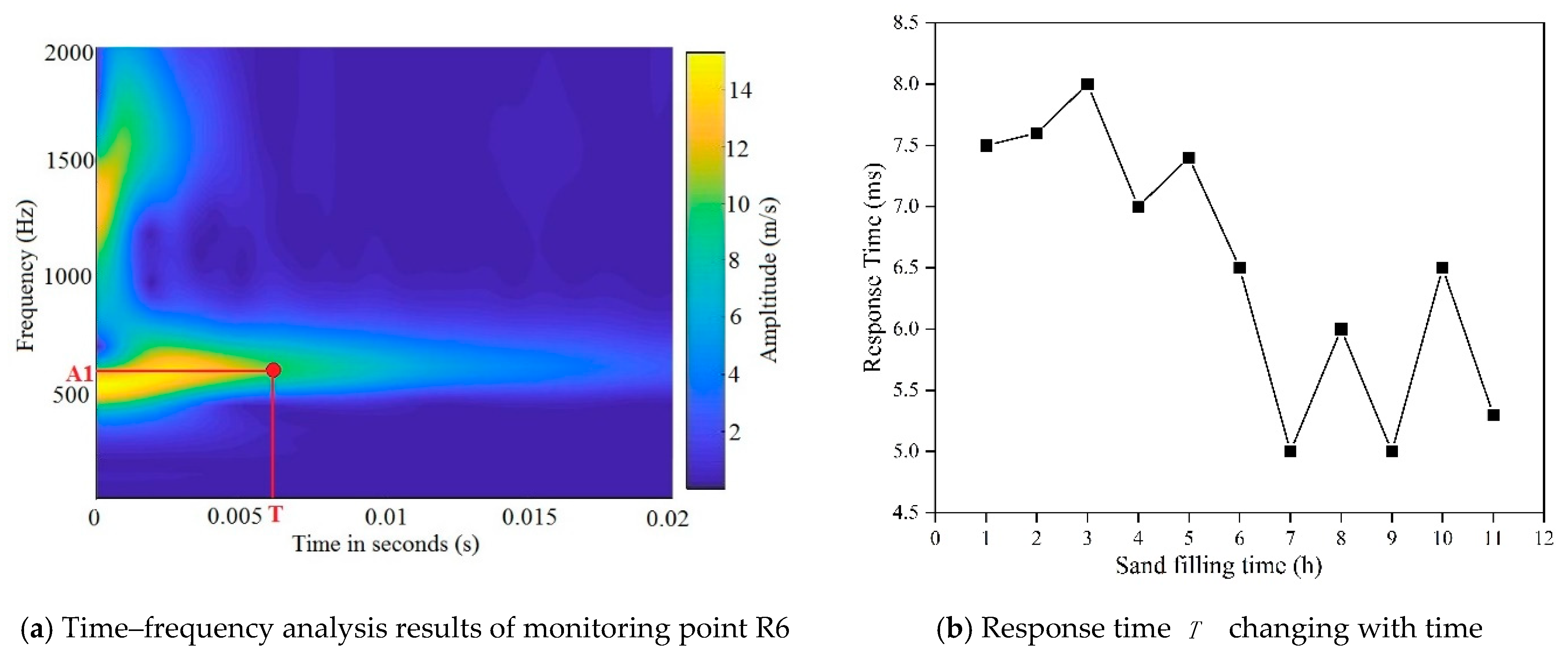
- Time-frequency analysis
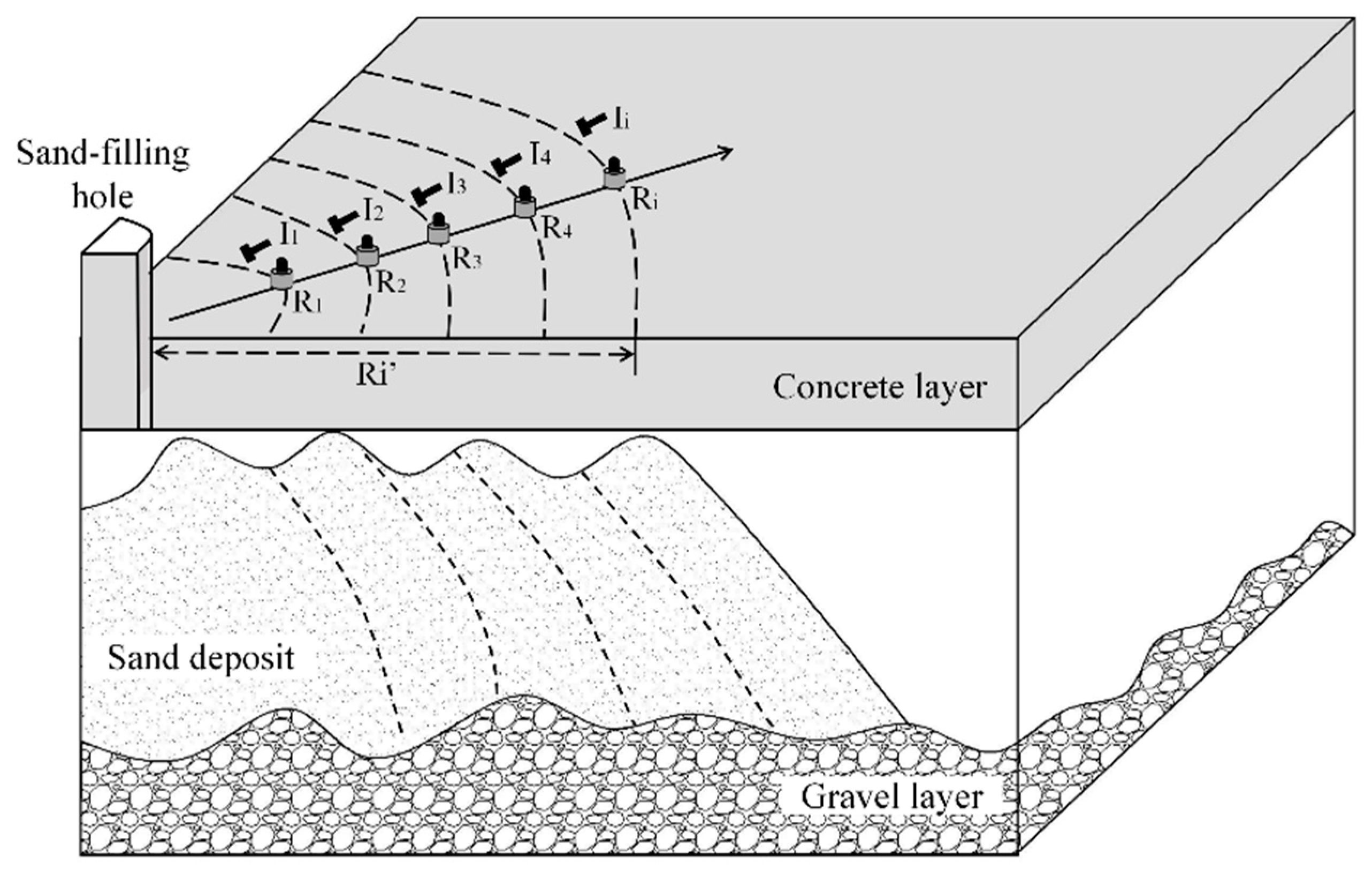
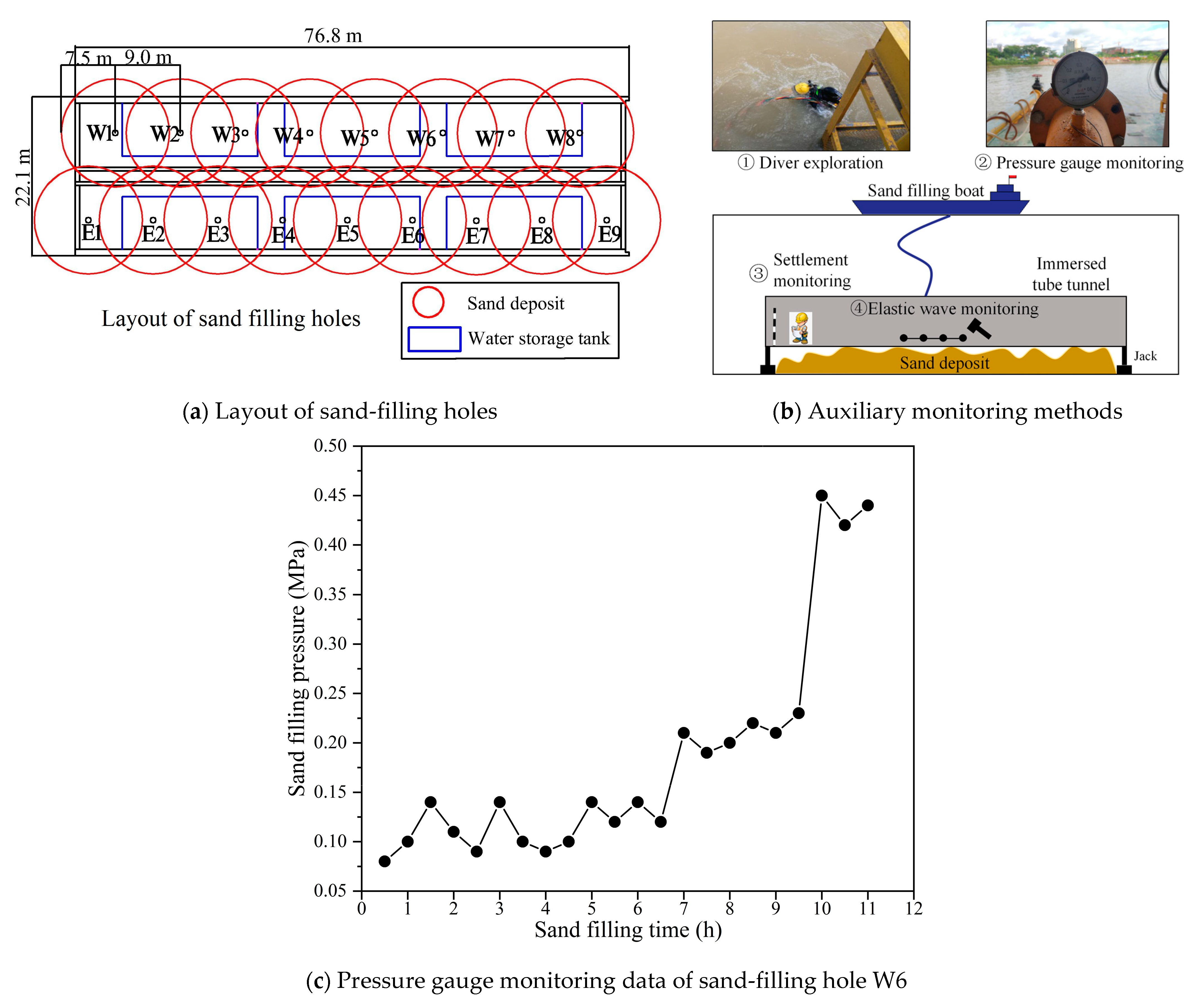
2.2. Sand-Filling Project of Immersed Tube Tunnel Foundation
- Case study: Jinguangdong immersed tube tunnel
- 2.
- Monitoring the cushion filling effect
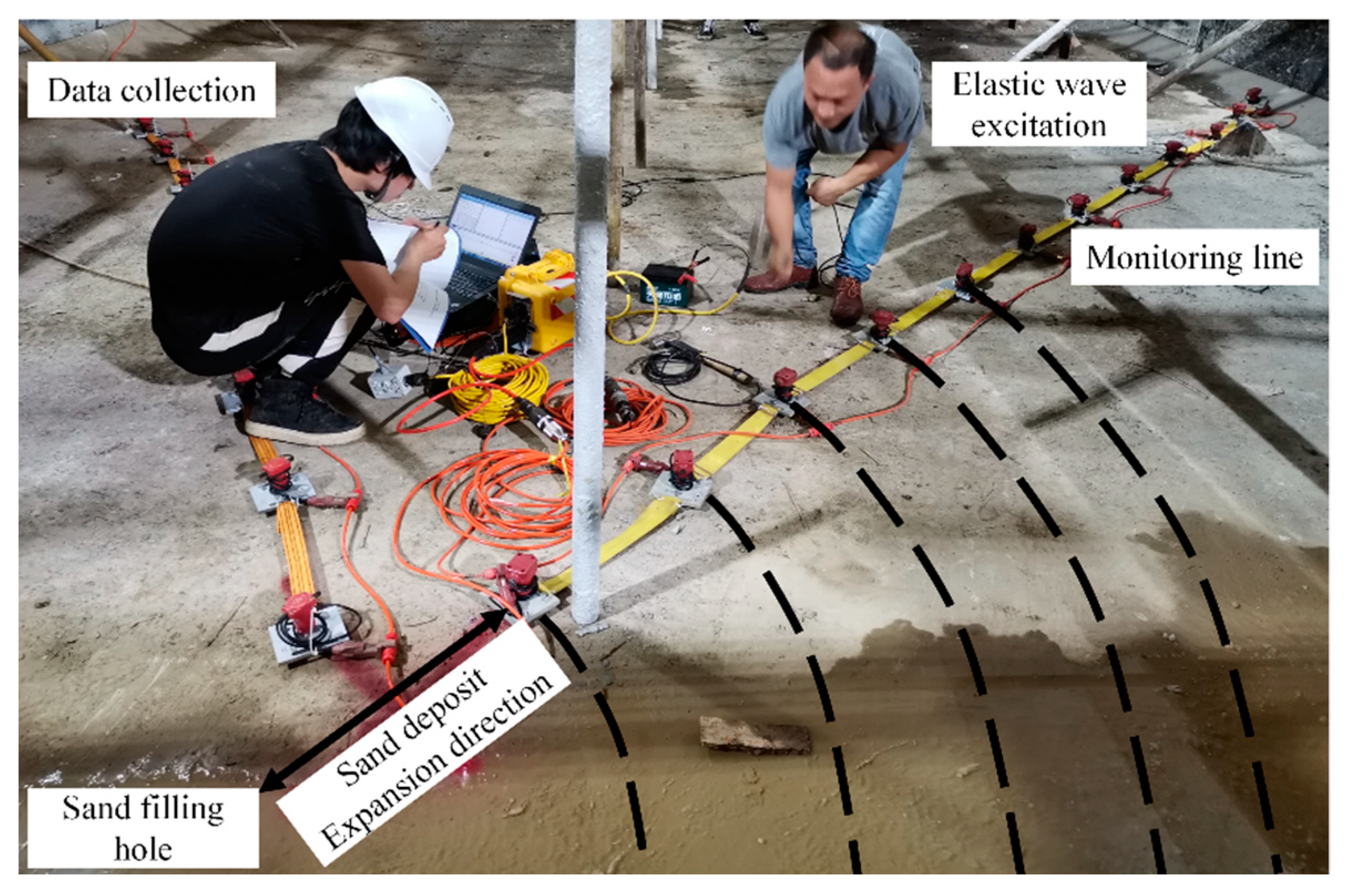
2.3. Elastic Wave Monitoring
2.3.1. Elastic Wave Monitoring System
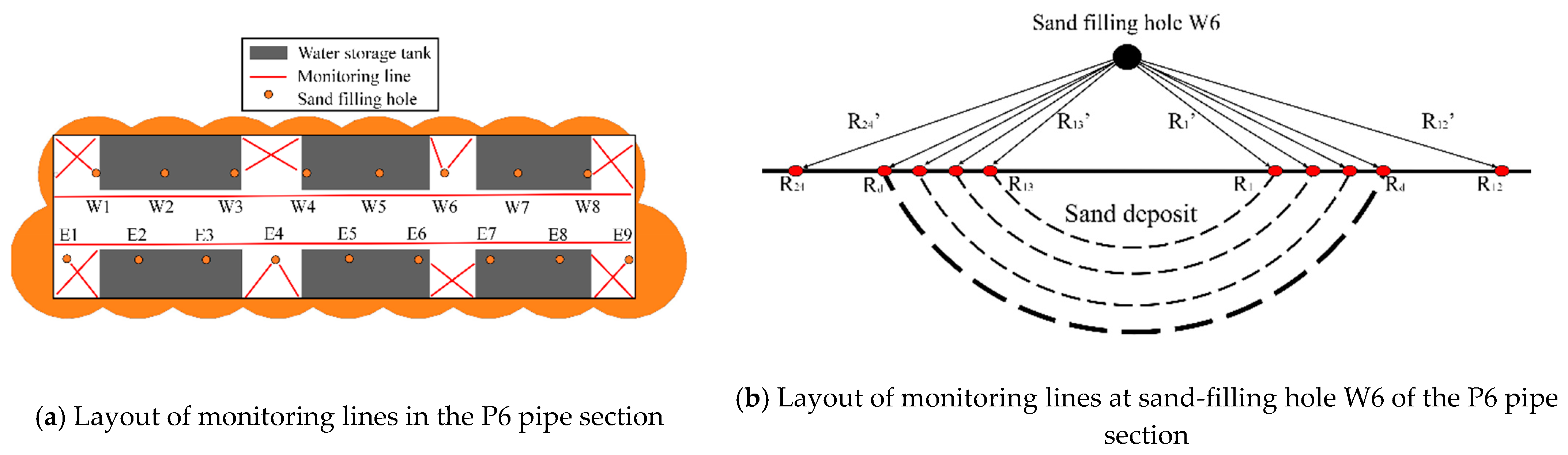
2.3.2. Monitoring Line
3. Evaluation Model of Foundation Cushion Filling Effect Based on Elastic Wave Monitoring
3.1. Monitoring Data Analysis
3.2. Elastic Wave Monitoring: BP Neural Network
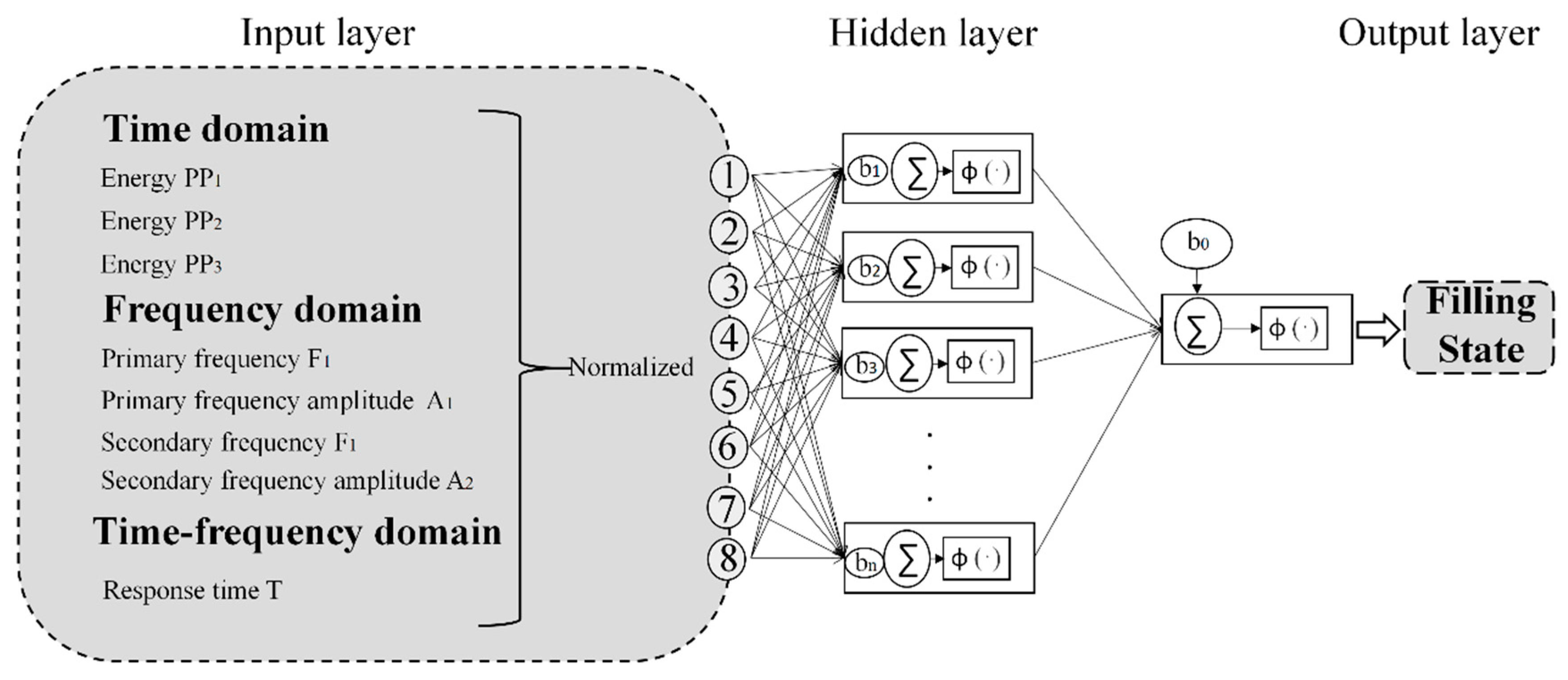
3.2.1. BP Neural Network Method
3.2.2. Sample Selection and Training
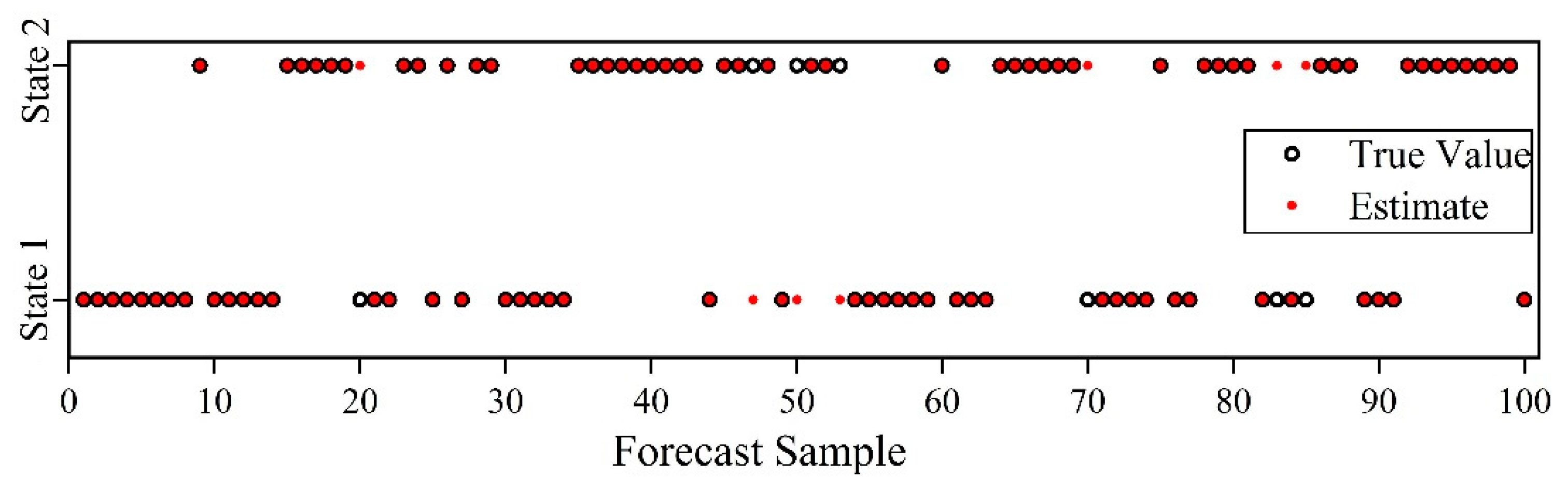
3.2.3. Test for BP Neural Network
4. Application of Spatiotemporal Monitoring Model
4.1. Spatiotemporal Monitoring for Sand-Filling
4.2. Monitoring Evaluation for Cushion Filling Results of P5 Pipe Section
5. Conclusions
- By analyzing the elastic wave data in the time, frequency, and time–frequency domains, it was possible to determine the feature parameters , , , , , , and to characterize the elastic wave. The feature parameters of elastic wave data change with the sand-filling process and exhibit nonlinearity and strong randomness.
- Using a neural network model, the mapping relationship between the collected elastic wave data and the sand-filling state was established to evaluate the sand-filling state. The accuracy of the proposed model for the test set was 93%.
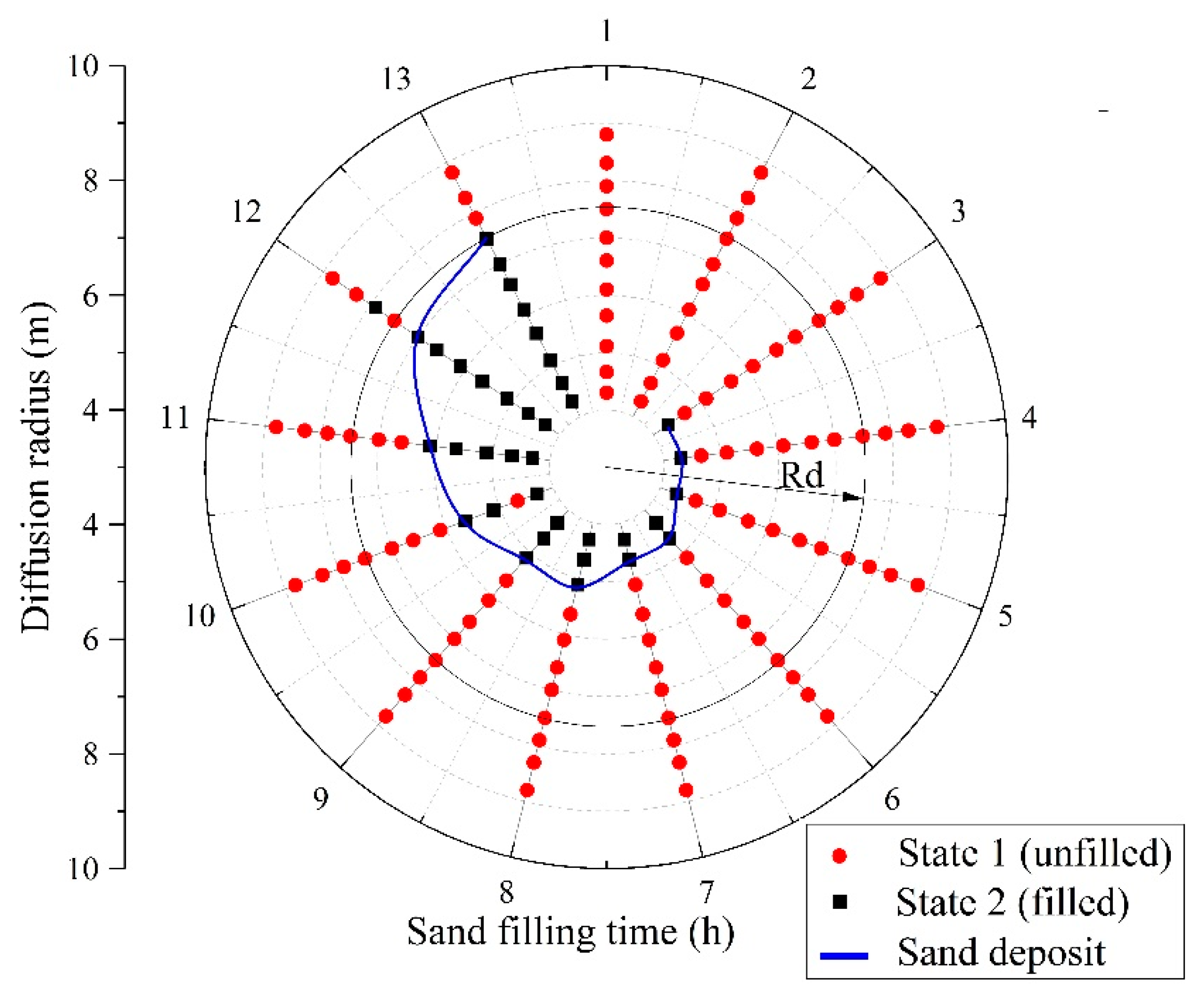
- The side holes and middle holes were classified and examined to analyze the diffusion characteristics of the sand deposit. For sand-filling hole W8, the proposed model effectively reflected the sand-filling state. The model could monitor the state of the sand deposit during the sand-filling construction process through the elastic wave monitoring results to provide knowledge about the sand-filling construction.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wei, G.; Qiu, H. Summary of model tests and settlement characteristics of base layer in immersed tube tunnel. Appl. Mech. Mater. 2013, 2574, 1421–1425. [Google Scholar] [CrossRef]
- Glerum, A. Developments in immersed tunneling in Holland. Tunn. Undergr. Space Technol. 1995, 10, 455–462. [Google Scholar] [CrossRef]
- Norman, D. The DEAS tunnel. Soc. Am. Mil. Eng. 1959, 342, 289–292. [Google Scholar]
- Stingl, V.; Eidelsburger, S.; Fruehauf, J.; Hangebrock, D. Jin Shazhou tunnel on the high-speed railway line Wuhan-Guangzhou- one of the most challenging tunnel constructions in China. Bauingenieur 2010, 85, 105–111. [Google Scholar]
- Grantz, W. Immersed tunnel settlements—Part 2: Case histories. Tunn. Undergr. Space Technol. 2001, 16, 203–210. [Google Scholar] [CrossRef]
- Wei, G.; Su, Q. Application of three-parameter model in settlement calculation of immersed tube tunnel. Appl. Mech. Mater. 2013, 470, 298–303. [Google Scholar] [CrossRef]
- Li, Y.; Cui, J.; Mo, H.; Li, W.; Yuan, J. Sand deposit arrangement and construction optimization for large-section immersed tube tunnel foundations via the sand flow method. Soil Mech. Found. Eng. 2017, 54, 324–329. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, X.; Bai, Y. Comparative study on foundation treatment methods of immersed tunnels in China. Front. Struct. Civ. Eng. 2020, 14, 82–93. [Google Scholar] [CrossRef]
- Li, B.; Chen, Z.; Liu, Z. Foundation settlement prediction of immersed tunnel based on monitoring data. IOP Conf. Ser. Mater. Sci. Eng. 2020, 780, 072028. [Google Scholar] [CrossRef]
- Li, W.; Fang, Y.; Mo, H. Model test of immersed tube tunnel foundation treated by sand-flow method. Tunn. Undergr. Space Technol. 2014, 40, 102–108. [Google Scholar] [CrossRef]
- Weng, X.; Feng, Y.; Lou, Y. The mechanical performance of shear key of immersed tube tunnel with differential foundation settlement. J. Sens. 2015, 2016, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Zhou, C.; Lu, Y.; Yang, X.; Liang, Y.; Zhang, L. Application of FRP Bolts in Monitoring the Internal Force of the Rocks Surrounding a Mine-Shield Tunnel. Sensors 2018, 18, 2763. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Che, A.; Zhu, R.; Fan, Y. An impact imaging method for monitoring on construction of immersed tube tunnel foundation treated by sand-filling method. Tunn. Undergr. Space Technol. 2019, 85, 1–11. [Google Scholar] [CrossRef]
- Cao, R.; Ma, M.; Liang, R.; Niu, C. Detecting the Void behind the Tunnel Lining by Impact-Echo Methods with Different Signal Analysis Approaches. Appl. Sci. 2019, 9, 3280. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Irfan, M.; Uchimura, T.; Cheng, G.; Nie, W. Elastic wave velocity monitoring as an emerging technique for rainfall-induced landslide prediction. Landslides 2018, 15, 1155–1172. [Google Scholar] [CrossRef]
- Chroscielewski, J.; Rucka, M.; Wilde, K.; Witkowski, W. Elastic wave propagation in frame structure in the context of structural health monitoring. In Proceedings of the Fourth European Workshop on Structural Health Monitoring, Cracow, Poland, 2–4 July 2008; pp. 467–473. [Google Scholar]
- Tao, S.; Uchimura, T.; Fukuhara, M.; Tang, J.; Chen, Y.; Huang, D. Evaluation of Soil Moisture and Shear Deformation Based on Compression Wave Velocities in a Shallow Slope Surface Layer. Sensors 2019, 19, 3406. [Google Scholar] [CrossRef] [Green Version]
- Zak, A.; Radzien’ski, M.; Krawczuk, M.; Ostachowicz, W. Damage detection strategies based on propagation of guided elastic waves. Smart Mater. Struct. 2012, 21, 035024. [Google Scholar] [CrossRef]
- Zima, B.; Rucka, M. Guided waves for monitoring of plate structures with linear cracks of variable length. Arch. Civ. Mech. Eng. 2016, 16, 387–396. [Google Scholar] [CrossRef]
- Chaki, S.; Bourse, G. Guided ultrasonic waves for non-destructive monitoring of the stress levels in prestressed steel strands. Ultrasonics 2009, 49, 162–171. [Google Scholar] [CrossRef]
- Worden, K.; Staszewski, W.; Hensman, J. Natural computing for mechanical systems research: A tutorial overview. Mech. Syst. Signal. Process. 2011, 25, 4–111. [Google Scholar] [CrossRef]
- Bao, Y.; Chen, Z.; Wei, S. The state-of-art of data science and engineering in structural health monitoring. Engineering 2019, 5, 234–242. [Google Scholar] [CrossRef]
- Sattari, M.T.; Avram, A.; Apaydin, H.; Matei, O. Soil Temperature Estimation with Meteorological Parameters by Using Tree-Based Hybrid Data Mining Models. Mathematics 2020, 8, 1407. [Google Scholar] [CrossRef]
- Noori Hoshyar, A.; Rashidi, M.; Liyanapathirana, R.; Samali, B. Algorithm Development for the Non-Destructive Testing of Structural Damage. Appl. Sci. 2019, 9, 2810. [Google Scholar] [CrossRef] [Green Version]
- Ni, K.; Ramanathan, N.; Chehade, M.; Balzano, L.; Nair, S.; Zahedi, S. Sensor network data fault types. ACM Trans. Sens. Netw. 2009, 5, 29. [Google Scholar] [CrossRef] [Green Version]
- Luo, Y.; Ye, Z.; Guo, X.; Qiang, X.; Chen, X. Data missing mechanism and missing data real-time processing methods in the construction monitoring of steel structures. Adv. Struct. Eng. 2015, 18, 585–601. [Google Scholar] [CrossRef]
- Yang, Y.; Nagarajaiah, S. Harnessing data structure for recovery of randomly missing structural vibration responses time history: Sparse representation versus low-rank structure. Mech. Syst. Signal Process. 2016, 74, 165–182. [Google Scholar] [CrossRef]
- Zhang, Z.; Luo, Y. Restoring method for missing data of spatial structural stress monitoring based on correlation. Mech. Syst. Signal Process. 2017, 91, 266–277. [Google Scholar] [CrossRef]
- Flood, I. Towards the next generation of artificial neural networks for civil engineering. Adv. Eng. Inf. 2008, 22, 4–14. [Google Scholar] [CrossRef]
- Hinton, G.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef] [Green Version]
- Nazarko, P.; Ziemia’nski, L. Damage detection in aluminum and composite elements using neural networks for Lamb waves signal processing. Eng. Fail. Anal. 2016, 69, 97–107. [Google Scholar] [CrossRef]
- Samarin, M.; Zweifel, L.; Roth, V.; Alewell, C. Identifying Soil Erosion Processes in Alpine Grasslands on Aerial Imagery with a U-Net Convolutional Neural Network. Remote Sens. 2020, 12, 4149. [Google Scholar] [CrossRef]
- Beskopylny, A.; Lyapin, A.; Anysz, H.; Meskhi, B.; Veremeenko, A.; Mozgovoy, A. Artificial Neural Networks in Classification of Steel Grades Based on Non-Destructive Tests. Materials 2020, 13, 2445. [Google Scholar] [CrossRef]
- Nazarko, P. Axial force prediction based on signals of the elastic wave propagation and artificial neural networks. MATEC Web Conf. 2019, 262, 10009. [Google Scholar] [CrossRef]
- Ratnam, T.; Ghosh, D.; Negash, B. The integration of elastic wave properties and machine learning for the distribution of petrophysical properties in reservoir modeling. IOP Conf. Ser. Mater. Sci. Eng. 2018, 352, 012024. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sand-Filling Hole | Sand-Filling Time (h) | Pipe Section Lifting State |
|---|---|---|
| W8 | 13 | Not uplifted |
| W7 | 7 | Not uplifted |
| W6 | 11 | Not uplifted |
| W5 | 8 | Not uplifted |
| W4 | 6 | The pipe was lifted by 4 cm at the 12th hour |
| W3 | 11 | Not uplifted |
| W2 | 12 | Not uplifted |
| W1 | 12 | Not uplifted |
| E9 | 13 | Not uplifted |
| E8 | 8 | Not uplifted |
| E7 | 11 | Not uplifted |
| E6 | 7 | Not uplifted |
| E5 | 12 | Not uplifted |
| E4 | 13 | Not uplifted |
| E3 | 12 | The pipe was lifted by 4 cm at the 10th hour |
| Part | Parameters |
|---|---|
| Geode seismograph | Recording channel: 24 channels Analogue-to-digital conversion: 24 bit Minimum sampling interval: 0.02 ms Low cutoff frequency: 10 Hz Manufacturer: Geode, USA |
| Detector and coupling device | Moving coil-type velocity detector Natural frequency: 100 Hz Manufacturer: China Chongqing Geological Instrument Factory |
| Computer | Installed with self-developed data acquisition software |
| Excitation hammer | Weight: 300 g |
| Power supply device | DC power supply: 24 V |
| Connection lines | Long enough |
| Classification | State |
|---|---|
| State 1 | Not filled |
| State 2 | Filled |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, P.; Che, A. Spatiotemporal Monitoring and Evaluation Method for Sand-Filling of Immersed Tube Tunnel Foundation. Appl. Sci. 2021, 11, 1084. https://doi.org/10.3390/app11031084
Wu P, Che A. Spatiotemporal Monitoring and Evaluation Method for Sand-Filling of Immersed Tube Tunnel Foundation. Applied Sciences. 2021; 11(3):1084. https://doi.org/10.3390/app11031084
Chicago/Turabian StyleWu, Peng, and Ailan Che. 2021. "Spatiotemporal Monitoring and Evaluation Method for Sand-Filling of Immersed Tube Tunnel Foundation" Applied Sciences 11, no. 3: 1084. https://doi.org/10.3390/app11031084