
EMG Based Gesture Recognition Using the Unbiased Difference Power

Abstract
:1. Introduction
2. Materials and Methods
2.1. Database Information
2.2. EMG Gesture Recognition
3. Proposed Method
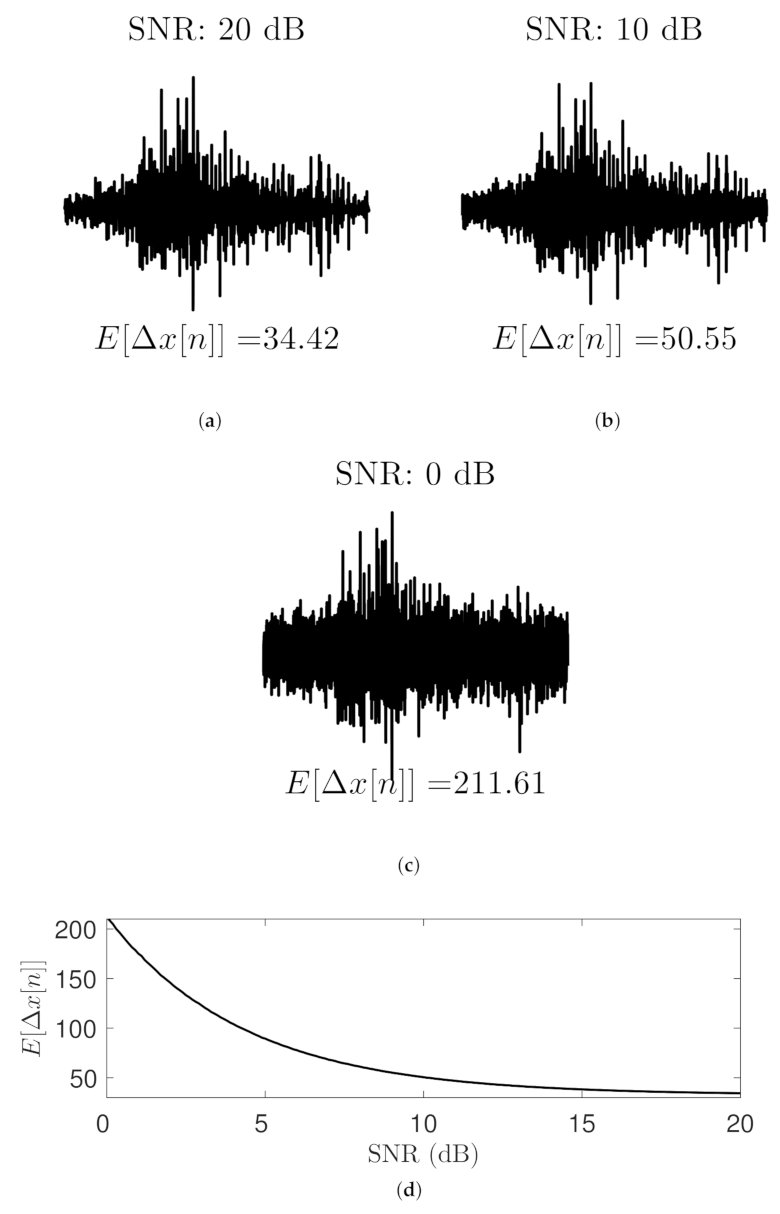
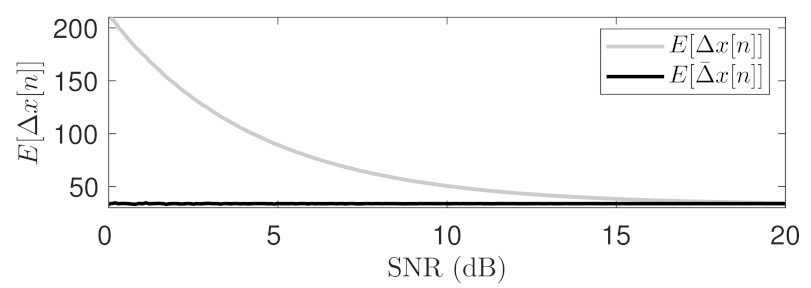
3.1. Unbiased Difference Power
3.2. Noise Power Estimation
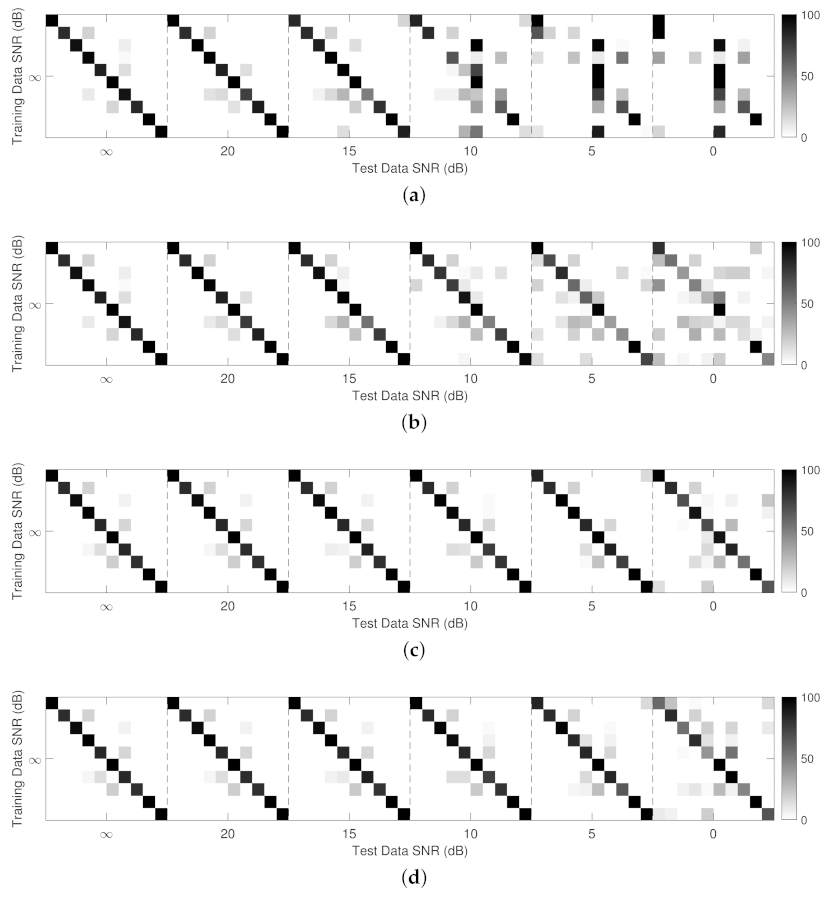
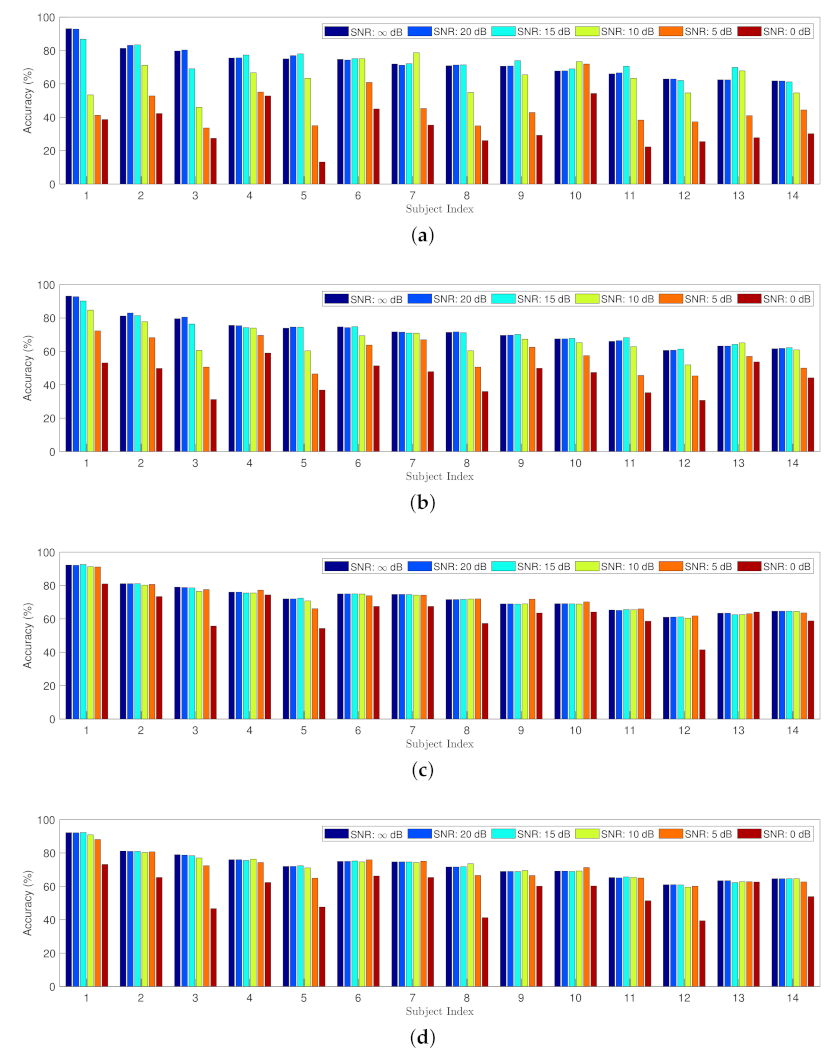
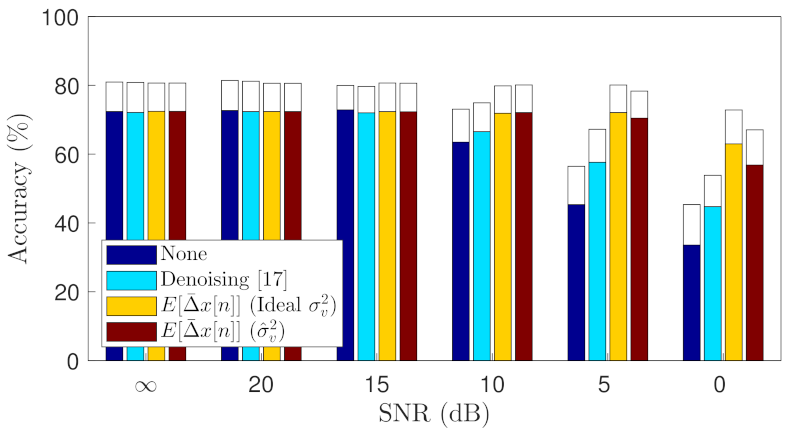
4. Result
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| EMG | Electromyography |
| SNR | Signal-to-noise ratio |
| LDA | Linear discriminant analysis |
References
- Matrone, G.C.; Cipriani, C.; Secco, E.L.; Magenes, G.; Carrozza, M.C. Principal components analysis based control of a multi-DoF underactuated prosthetic hand. J. Neuroeng. Rehabil. 2010, 7, 7–16. [Google Scholar] [CrossRef] [Green Version]
- Castellini, C.; Van Der Smagt, P. Surface EMG in advanced hand prosthetics. Biol. Cybern. 2009, 100, 35–47. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Naik, G.R.; Nguyen, H.T. Non Negative Matrix Factorization for the Identification of EMG Finger Movements: Evaluation Using Matrix Analysis. IEEE J. Biomed. Health Inf. 2015, 19, 478–485. [Google Scholar] [CrossRef]
- Lu, Z.; Chen, X.; Li, Q.; Zhang, X.; Zhou, P. A hand gesture recognition framework and wearable gesture-based interaction prototype for mobile devices. IEEE Trans. Hum.-Mach. Syst. 2014, 44, 293–299. [Google Scholar] [CrossRef]
- Englehart, K.; Hudgins, B.; Parker, P.A.; Stevenson, M. Classification of the myoelectric signal using time-frequency based representations. Med. Eng. Phys. 1999, 21, 431–438. [Google Scholar] [CrossRef]
- Atzori, M.; Gijsberts, A.; Kuzborskij, I.; Elsig, S.; Mittaz Hager, A.G.; Deriaz, O.; Castellini, C.; Muller, H.; Caputo, B. Characterization of a Benchmark Database for Myoelectric Movement Classification. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 73–83. [Google Scholar] [CrossRef] [PubMed]
- Chowdhury, R.H.; Reaz, M.B.I.; Ali, M.A.M. Surface Electromyography Signal Processing and Classification Techniques. Sensors 2013, 13, 12431–12466. [Google Scholar] [CrossRef]
- Boyali, A.; Hashimoto, N. Spectral Collaborative Representation based Classification for hand gestures recognition on electromyography signals. Biomed. Signal Process. Control. 2016, 24, 11–18. [Google Scholar] [CrossRef] [Green Version]
- Jiang, N.; Dosen, S.; Farina, D. Myoelectric Control of Artificial Limbs—Is There a Need to Change Focus? IEEE Signal Process. Mag. 2012, 29, 12–15. [Google Scholar] [CrossRef]
- Rafiee, J.; Rafiee, M.A.; Yavari, F.; Schoen, M.P. Feature Extraction of Forearm EMG Signals for Prosthetics. Expert Syst. Appl. 2011, 38, 4058–4067. [Google Scholar] [CrossRef]
- Ju, Z.; Ouyang, G.; Wilamowska-Korsak, M.; Liu, H. Surface EMG Based Hand Manipulation Identification via Nonlinear Feature Extraction and Classification. IEEE Sens. J. 2013, 13, 3302–3311. [Google Scholar] [CrossRef]
- Altin, C.; Er, O. Comparison of different time and frequency domain feature extraction methods on elbow gesture’s EMG. Eur. J. Interdiscip. Stud. 2016, 2, 35–44. [Google Scholar] [CrossRef] [Green Version]
- Arief, Z.; Sulistijono, I.A.; Ardiansyah, R.A. Comparison of five time series EMG features extractions using Myo Armband. In Proceedings of the International Electronics Symposium, Surabaya, Indonesia, 29–30 September 2015; pp. 11–14. [Google Scholar]
- Phinyomark, A.; Limsakul, C.; Phukpattaranont, P. A Novel Feature Extraction for Robust EMG Pattern Recognition. J. Comput. 2009, 1, 71–80. [Google Scholar]
- Phinyomark, A.; Qu, F.; Chrbonnier, S.; Serviere, C.; Tarpin-Benard, F.; Laurillau, Y. EMG feature evaluation for improving myoelectric pattern recognition robustness. Expert Syst. Appl. 2013, 40, 4832–4840. [Google Scholar] [CrossRef]
- Luca, C.J.D.; Gilmore, L.D.; Kuznetsov, M.; Roy, S.H. Filtering the surface EMG signal: Movement artifact and baseline noise contamination. J. Biomech. 2010, 43, 1573–1579. [Google Scholar] [CrossRef]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Wavelet-Based Denoising Algorithm for Robust EMG Pattern Recognition. Fluct. Noise Lett. 2011, 10, 157–167. [Google Scholar] [CrossRef]
- Messer, S.R.; Agzarian, J.; Abbott, D. Optimal wavelet denoising for phonocardiograms. Microelectron. J. 2001, 32, 931–941. [Google Scholar] [CrossRef]
- Khan, S.M.; Khan, A.A.; Farooq, O. Selection of Features and Classifiers for EMG-EEG-Based Upper Limb Assistive Devices—A Review. IEEE Rev. Biomed. Eng. 2020, 13, 248–260. [Google Scholar] [CrossRef]
- Phinyomark, A.; Quaine, F.; Charbonnier, S.; Serviere, C.; Tarpin-Bernard, F.; Laurillau, Y. Feature extraction of the first difference of EMG time series for EMG pattern recognition. Comput. Methods Programs Biomed. 2014, 117, 247–256. [Google Scholar] [CrossRef]
- Phinyomark, A.; Khushaba, R.N.; Ibanez-Marcelo, E.; Patania, A.; Scheme, E.; Petri, G. Navigating features: A topologically informed chart of electromyographic features space. J. R. Soc. Interface 2017, 14, 20170734. [Google Scholar] [CrossRef] [Green Version]
- Phinyomark, A.; Khushaba, R.N.; Scheme, E. Feature extraction and selection for myoelectric control based on wearable EMG sensors. Sensors 2018, 18, 1615. [Google Scholar] [CrossRef] [Green Version]
- Atzori, M.; Gijsberts, A.; Castellini, C.; Caputo, B.; Hager, A.G.M.; Elsig, S.; Giatsidis, G.; Bassetto, F.; Müller, H. Electromyography data for non-invasive naturally-controlled robotic hand prostheses. Sci. Data 2014, 1, 140053. [Google Scholar] [CrossRef] [Green Version]
- Atzori, M. Ninapro Repository. Available online: http://ninapro.hevs.ch (accessed on 8 February 2021).
- Englehart, K.; Hudgin, B.; Parker, P.A. A wavelet-based continuous classification scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 2001, 48, 302–311. [Google Scholar] [CrossRef] [PubMed]
- Kaufmann, P.; Englehart, K.; Platzner, M. Fluctuating emg signals: Investigating long-term effects of pattern matching algorithms. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 6357–6360. [Google Scholar]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Fang, J.; Agarwal, G.C.; Shahani, B.T. Decomposition of EMG signal by wavelet spectrum matching. In Proceedings of the 19th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 30 October–2 November 1997; Volume 3, pp. 1253–1256. [Google Scholar]
- Thexton, A.J. A randomisation method for discriminating between signal and noise recordings of rhythmic electromyographic activity. J. Neurosci. Methods 1996, 66, 93–98. [Google Scholar] [CrossRef]
- Martin, R. Noise power spectral density estimation based on optimal smoothing and minimum statistics. IEEE Trans. Speech Audio Process. 2001, 9, 504–512. [Google Scholar] [CrossRef] [Green Version]
- Rangachari, S.; Loizou, P.C. A noise-estimation algorithm for highly non-stationary environments. Speech Commun. 2005, 48, 220–231. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Description | |
|---|---|---|
| Hand Postures | 1 | Flexion of ring and little finger |
| 2 | Thumb opposing base of little finger | |
| 3 | Abduction of the fingers | |
| 4 | Fingers closed together | |
| Wrist Movements | 5–6 | Wrist supination and pronation |
| (rotation axis through the middle finger) | ||
| 7–8 | Wrist supination and pronation | |
| (rotation axis through the little finger) | ||
| 9 | Wrist radial and ulnar deviation | |
| 10 | Wrist extension with closed hand |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, K.; Shin, H.-C. EMG Based Gesture Recognition Using the Unbiased Difference Power. Appl. Sci. 2021, 11, 1526. https://doi.org/10.3390/app11041526
Kang K, Shin H-C. EMG Based Gesture Recognition Using the Unbiased Difference Power. Applied Sciences. 2021; 11(4):1526. https://doi.org/10.3390/app11041526
Chicago/Turabian StyleKang, Kimoon, and Hyun-Chool Shin. 2021. "EMG Based Gesture Recognition Using the Unbiased Difference Power" Applied Sciences 11, no. 4: 1526. https://doi.org/10.3390/app11041526