
Viscous Vortex Particle Method Coupling with Computational Structural Dynamics for Rotor Comprehensive Analysis


Abstract
:1. Introduction
2. Panel/Viscous Vortex Particle Aerodynamic Model
2.1. Panel Method
2.2. Vortex Particle Method
2.3. Hybrid Method
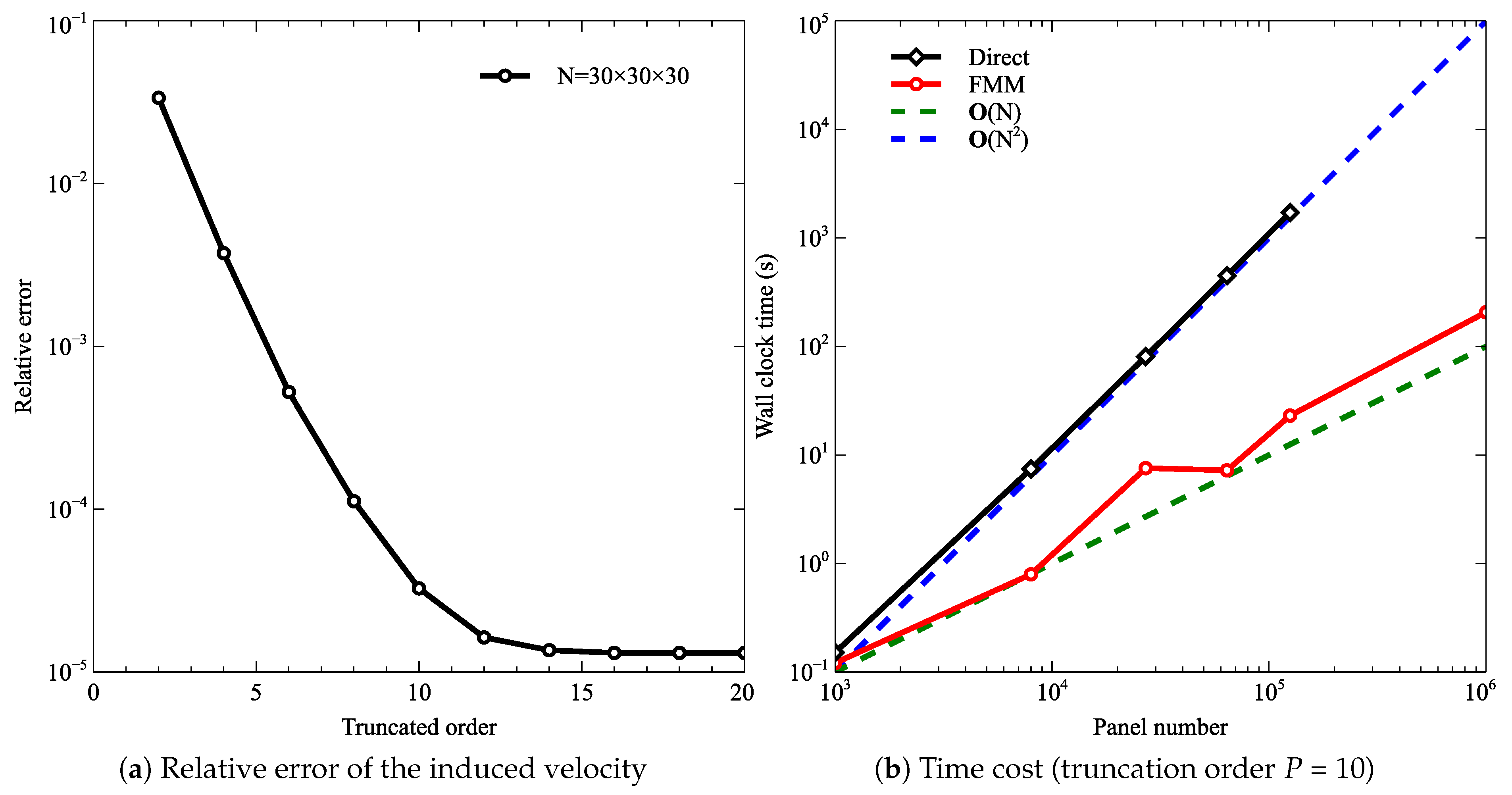
2.4. Fast Summation Method
3. CSD Model
4. Aeroelastic Coupling
5. Numerical Examples
5.1. Caradonna–Tung Rotor
5.2. AH-1G Rotor in Forward Flight
5.3. CSD
5.4. HART II Rotor Coupling with CSD
6. Conclusions
- When the vortex panel method was combined with the viscous vortex particle method, the predicted blade pressure, normal thrust, and wake geometry match well with experimental data and CFD results both in the hover and forward flight conditions.
- The classical particle-based fast multipole method was extended to a hybrid particle-panel computational domain by using a semi-analytical approach. The convergence of numerical tests show that, as the truncation order grows, a reasonable accuracy can be obtained; in addition, the numerical tests show that the presented algorithm has a computational complexity of .
- When t vortex code was coupled with the computational structural dynamics code MBDyn, the results show that the VPM/MBDyn coupling approach can predict the unsteady airloads well and is capable of capturing the BVI phenomenon, a necessary requisite for a future, accurate evaluation of the rotor aeroacoustic response.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hodges, D.H. Review of composite rotor blade modeling. AIAA J. 1990, 28, 561–565. [Google Scholar] [CrossRef]
- Hodges, D.H. Unified approach for accurate and efficient modeling of composite rotor blade dynamics The Alexander A. Nikolsky honorary lecture. J. Am. Helicopter Soc. 2015, 60, 1–28. [Google Scholar] [CrossRef]
- Leishman, G.J. Principles of Helicopter Aerodynamics with CD Extra; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Datta, A.; Nixon, M.; Chopra, I. Review of rotor loads prediction with the emergence of rotorcraft CFD. J. Am. Helicopter Soc. 2007, 52, 287–317. [Google Scholar] [CrossRef] [Green Version]
- Johnson, W. Rotorcraft Aeromechanics Applications of a Comprehensive Analysis. In Proceedings of the Heli Japan 98, AHS International Meeting on Advanced Rotorcraft Technology and Disaster Relief, Gifu, Japan, 21–23 April 1998. [Google Scholar]
- Bauchau, O.A.; Bottasso, C.L.; Nikishkov, Y.G. Modeling rotorcraft dynamics with finite element multibody procedures. Math. Comput. Model. 2001, 33, 1113–1137. [Google Scholar] [CrossRef]
- Saberi, H.; Khoshlahjeh, M.; Ormiston, R.A.; Rutkowski, M.J. Overview of RCAS and application to advanced rotorcraft problems. In Proceedings of the American Helicopter Society 4th Decennial Specialist’s Conference on Aeromechanics, San Francisco, CA, USA, 21–23 January 2004. [Google Scholar]
- Bir, G.; Chopra, I.; Nguyen, K. Development of UMARC (University of Maryland advanced rotorcraft code). In Proceedings of the 46th AHS Annual National Forum, Washington, DC, USA, 21–23 May 1990. [Google Scholar]
- Masarati, P.; Morandini, M.; Mantegazza, P. An Efficient Formulation for General-Purpose Multibody/Multiphysics Analysis. J. Comput. Nonlinear Dyn. 2014, 9, 041001. [Google Scholar] [CrossRef]
- Bauchau, O.; Ahmad, J. Advanced CFD and CSD methods for multidisciplinary applications in rotorcraft problems. In Proceedings of the 6th Symposium on Multidisciplinary Analysis and Optimization, Bellevue, WA, USA, 4–6 September 1996; p. 4151. [Google Scholar]
- Potsdam, M.; Yeo, H.; Johnson, W. Rotor airloads prediction using loose aerodynamic/structural coupling. J. Aircr. 2006, 43, 732–742. [Google Scholar] [CrossRef]
- Boyd, D.D. HART-II acoustic predictions using a coupled CFD/CSD method. In Proceedings of the American Helicopter Society 65th Annual Forum, Grapevine, TX, USA, 27–29 May 2009. [Google Scholar]
- Smith, M.J.; Lim, J.W.; van der Wall, B.G.; Baeder, J.D.; Biedron, R.T.; Boyd, D.D.; Jayaraman, B.; Jung, S.N.; Min, B.Y. The HART II international workshop: An assessment of the state of the art in CFD/CSD prediction. Ceas Aeronaut. J. 2013, 4, 345–372. [Google Scholar] [CrossRef]
- Opoku, D.G.; Triantos, D.G.; Nitzsche, F.; Voutsinas, S.G. Rotorcraft aerodynamic and aeroacoustic modelling using vortex particle methods. In Proceedings of the 23rd International Congress of Aeronautical Sciences (ICAS 2002), Toronto, ON, Canada, 8–13 September 2002; pp. 8–13. [Google Scholar]
- Willis, D.J.; Peraire, J.; White, J.K. A combined pFFT-multipole tree code, unsteady panel method with vortex particle wakes. Int. J. Numer. Methods Fluids 2007, 53, 1399–1422. [Google Scholar] [CrossRef]
- Kenyon, A.R.; Brown, R.E. Wake dynamics and rotor-fuselage aerodynamic interactions. J. Am. Helicopter Soc. 2009, 54, 12003. [Google Scholar] [CrossRef] [Green Version]
- He, C.; Zhao, J. Modeling rotor wake dynamics with viscous vortex particle method. AIAA J. 2009, 47, 902–915. [Google Scholar] [CrossRef]
- Tan, J.F.; Wang, H.W. Simulating unsteady aerodynamics of helicopter rotor with panel/viscous vortex particle method. Aerosp. Sci. Technol. 2013, 30, 255–268. [Google Scholar] [CrossRef]
- Wang, Y.; Abdel-Maksoud, M.; Song, B. A boundary element-vortex particle hybrid method with inviscid shedding scheme. Comput. Fluids 2018, 168, 73–86. [Google Scholar] [CrossRef]
- Tugnoli, M.; Montagnani, D.; Fonte, F.; Zanotti, A.; Droandi, G. Mid-Fidelity Analysis of Unsteady Interactional Aerodynamics of Complex VTOL Configurations. In Proceedings of the 45th European Rotorcraft Forum, Warsaw, Poland, 17–20 September 2019. [Google Scholar]
- Greengard, L.; Rokhlin, V. A fast algorithm for particle simulations. J. Comput. Phys. 1987, 73, 325–348. [Google Scholar] [CrossRef]
- Barnes, J.; Hut, P. A hierarchical O (N log N) force-calculation algorithm. Nature 1986, 324, 446–449. [Google Scholar] [CrossRef]
- Alvarez, E.J.; Ning, A. High-Fidelity Modeling of Multirotor Aerodynamic Interactions for Aircraft Design. AIAA J. 2020, 58, 4385–4400. [Google Scholar] [CrossRef]
- Yokota, R.; Barba, L.A. FMM-based vortex method for simulation of isotropic turbulence on GPUs, compared with a spectral method. Comput. Fluids 2013, 80, 17–27. [Google Scholar] [CrossRef] [Green Version]
- Hu, Q.; Gumerov, N.A.; Yokota, R.; Barba, L.; Duraiswami, R. Scalable fast multipole accelerated vortex methods. In Proceedings of the 2014 IEEE International Parallel & Distributed Processing Symposium Workshops, Phoenix, AZ, USA, 19–23 May 2014; pp. 966–975. [Google Scholar]
- Cheng, H.; Greengard, L.; Rokhlin, V. A fast adaptive multipole algorithm in three dimensions. J. Comput. Phys. 1999, 155, 468–498. [Google Scholar] [CrossRef]
- Hess, J.L.; Smith, A.O. Calculation of potential flow about arbitrary bodies. Prog. Aerosp. Sci. 1967, 8, 1–138. [Google Scholar] [CrossRef]
- Ghiringhelli, G.L.; Masarati, P.; Mantegazza, P. Multibody Implementation of Finite Volume C Beams. AIAA J. 2000, 38, 131–138. [Google Scholar] [CrossRef]
- Cesnik, C.E.; Hodges, D.H. VABS: A new concept for composite rotor blade cross-sectional modeling. J. Am. Helicopter Soc. 1997, 42, 27–38. [Google Scholar] [CrossRef]
- Giavotto, V.; Borri, M.; Mantegazza, P.; Ghiringhelli, G.; Carmaschi, V.; Maffioli, G.; Mussi, F. Anisotropic beam theory and applications. Comput. Struct. 1983, 16, 403–413. [Google Scholar] [CrossRef]
- Morandini, M.; Chierichetti, M.; Mantegazza, P. Characteristic behavior of prismatic anisotropic beam via generalized eigenvectors. Int. J. Solids Struct. 2010, 47, 1327–1337. [Google Scholar] [CrossRef] [Green Version]
- Quaranta, G.; Masarati, P.; Mantegazza, P. A conservative mesh-free approach for fluid-structure interface problems. In Proceedings of the International Conference for Coupled Problems in Science and Engineering, Santorini Island, Greece, 25–28 May 2005. [Google Scholar]
- Caradonna, F.X.; Tung, C. Experimental and Analytical Studies of a Model Helicopter Rotor in Hover; Technical Report TM 81232; NASA: Washington, DC, USA, 1980.
- Cross, J.L.; Watts, M.E. Tip Aerodynamics and Acoustics Test: A Report and Data Survey; Technical Report NASA-RP-1179; NASA: Washington, DC, USA, 1988.
- Kim, J.W.; Park, S.H.; Yu, Y.H. Euler and Navier-Stokes Simulations of Helicopter Rotor Blade in Forward Flight Using an Overlapped Grid Solver. In Proceedings of the 19th AIAA Computational Fluid Dynamics, San Antonio, TX, USA, 22–25 June 2009. [Google Scholar] [CrossRef]
- Cheng, T. Structural Dynamics Modeling of Helicopter Blades for Computational Aeroelasticity. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2002. [Google Scholar]
- Hodges, D.H. A mixed variational formulation based on exact intrinsic equations for dynamics of moving beams. Int. J. Solids Struct. 1990, 26, 1253–1273. [Google Scholar] [CrossRef]
- Yu, Y.H.; Tung, C.; van der Wall, B.; Pausder, H.J.; Burley, C.; Brooks, T.; Beaumier, P.; Delrieux, Y.; Mercker, E.; Pengel, K. The HART-II Test: Rotor Wakes and Aeroacoustics with Higher-Harmonic Pitch Control (HHC) Inputs-the Joint German/French/Dutch/US Project; Technical Report; National Aeronautics And Space Admin Langley Research Center: Hampton VA, USA, 2002.
- van der Wall, B.G.; Burley, C.L. 2nd HHC Aeroacoustic Rotor Test (HART II)–Part II: Representative Results; Technical Report IB 111-2005/03; German Aerospace Center (DLR) Institute of Flight Systems Helicopter Division: Braunschweig, Germany, 2005. [Google Scholar]
- Smith, M.J.; Lim, J.W.; van der Wall, B.G.; Baeder, J.D.; Biedron, R.T.; Boyd, D.D., Jr.; Jayaraman, B.; Jung, S.N.; Min, B.Y. An assessment of CFD/CSD prediction state-of-the-art using the HART II international workshop data. In Proceedings of the American Helicopter Society 68th Annual Forum, Fort Worth, TX, USA, 1–3 May 2012. [Google Scholar]
- van der Wall, B.G. 2nd HHC Aeroacoustic Rotor Test (HART II)–Part I: Test Documentation; Technical Report IB 111-2003/31; German Aerospace Center (DLR) Institute of Flight Systems Helicopter Division: Braunschweig, Germany, 2003. [Google Scholar]
- Kumar, A.A.; Viswamurthy, S.; Ganguli, R. Correlation of helicopter rotor aeroelastic response with HART-II wind tunnel test data. Aircr. Eng. Aerosp. Technol. 2010. [Google Scholar] [CrossRef]
- Yang, Z.; Sankar, L.N.; Smith, M.J.; Bauchau, O. Recent improvements to a hybrid method for rotors in forward flight. J. Aircr. 2002, 39, 804–812. [Google Scholar] [CrossRef]
- Biedron, R.; Lee-Rausch, E. Rotor airloads prediction using unstructured meshes and loose CFD/CSD coupling. In Proceedings of the 26th AIAA Applied Aerodynamics Conference, Honolulu, HI, USA, 18–21 August 2008; p. 7341. [Google Scholar]
- Kim, Y.; Kwon, O.J. Aeroelastic Study for HART II Rotor Using Unstructured Mixed Meshes. Int. J. Aeronaut. Space Sci. 2019, 20, 1–15. [Google Scholar] [CrossRef]
- Swanson, S.M.; McCluer, M.S.; Yamauchi, G.K.; Swanson, A.A. Airloads Measurements from a 1/4-Scale Tiltrotor Wind Tunnel Test; Technical Report; NASA Ames Research Center: Washington, DC, USA, 1999.
- Johnson, W. Calculation of the Aerodynamic Behavior of the Tilt Rotor Aeroacoustic Model (TRAM) in the DNW; Technical Report; Army/NASA Rotorcraft Division, Army Aviation and Missile Command, Aeroflightdynamics Directorate (AMRDEC), Ames Research Center: Moffett Field, CA, USA, 2001.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass (kgm) | 0.2 | (kgm) | 10 |
| (kgm) | 10 | (kgm) | 10 |
| (N) | 10 | (N) | 10 |
| (N) | 10 | (Nm) | 50 |
| (Nm) | 50 | (Nm) | 10 |
| GEBT | Dymore | Present |
|---|---|---|
| 55.6 rad/s | 55.6 rad/s | 55.58 rad/s |
| 0.0 | 0.0 | 0.0 | 0.0 | 1.26 × 108 | 3000 | 14,000 | 380 | 4.24 | 3.67 | 0.4 | 0.4 | 0.8 |
| 0.075 | 0.0 | 0.0 | 0.0 | 1.26 × 108 | 3000 | 14,000 | 380 | 4.24 | 3.67 | 0.4 | 0.4 | 0.8 |
| 0.15 | 0.0 | 0.0 | 0.0 | 2.11 × 107 | 675 | 3390 | 380 | 4.24 | 1.57 | 0.29 | 0.052 | 0.342 |
| 0.19 | 0.0 | 0.0 | 0.0 | 2.11 × 107 | 675 | 4420 | 442 | 4.24 | 1.57 | 0.29 | 0.052 | 0.342 |
| 0.24 | 0.0006 | 0.0033 | 0.0 | 2.11 × 107 | 675 | 5370 | 500 | 4.24 | 1.72 | 0.41 | 0.052 | 0.462 |
| 0.29 | 0.0018 | 0.0037 | −0.00195 | 2.05 × 107 | 594 | 5930 | 460 | 4.24 | 1.71 | 0.45 | 0.045 | 0.495 |
| 0.34 | 0.0019 | 0.0043 | −0.00415 | 2.11 × 107 | 480 | 6610 | 390 | 4.24 | 1.67 | 0.46 | 0.035 | 0.495 |
| 0.39 | 0.0044 | 0.0073 | −0.00625 | 1.87 × 107 | 400 | 5710 | 320 | 4.24 | 1.47 | 0.53 | 0.03 | 0.56 |
| 0.415 | 0.0029 | 0.0092 | −0.00835 | 1.69 × 107 | 290 | 5710 | 280 | 4.24 | 1.45 | 0.69 | 0.024 | 0.714 |
| 0.44 | −0.0055 | 0.0003 | 0.00535 | 1.17 × 107 | 250 | 5200 | 160 | 4.24 | 0.95 | 0.73 | 0.017 | 0.747 |
| 2.0 | −0.0055 | 0.0003 | 0.00535 | 1.17 × 107 | 250 | 5200 | 160 | −2.0 | 0.95 | 0.73 | 0.017 | 0.747 |
| Collective | Longitudinal | Lateral | |
|---|---|---|---|
| Experiment | 3.80 | −1.34 | 1.92 |
| Present | 3.925 | −1.116 | 1.347 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Morandini, M.; Li, S. Viscous Vortex Particle Method Coupling with Computational Structural Dynamics for Rotor Comprehensive Analysis. Appl. Sci. 2021, 11, 3149. https://doi.org/10.3390/app11073149
Zhu W, Morandini M, Li S. Viscous Vortex Particle Method Coupling with Computational Structural Dynamics for Rotor Comprehensive Analysis. Applied Sciences. 2021; 11(7):3149. https://doi.org/10.3390/app11073149
Chicago/Turabian StyleZhu, Wenguo, Marco Morandini, and Shu Li. 2021. "Viscous Vortex Particle Method Coupling with Computational Structural Dynamics for Rotor Comprehensive Analysis" Applied Sciences 11, no. 7: 3149. https://doi.org/10.3390/app11073149