
Vertical Seismic Isolation Device for Three-Dimensional Seismic Isolation of Nuclear Power Plant Equipment—Case Study


Abstract
:1. Introduction
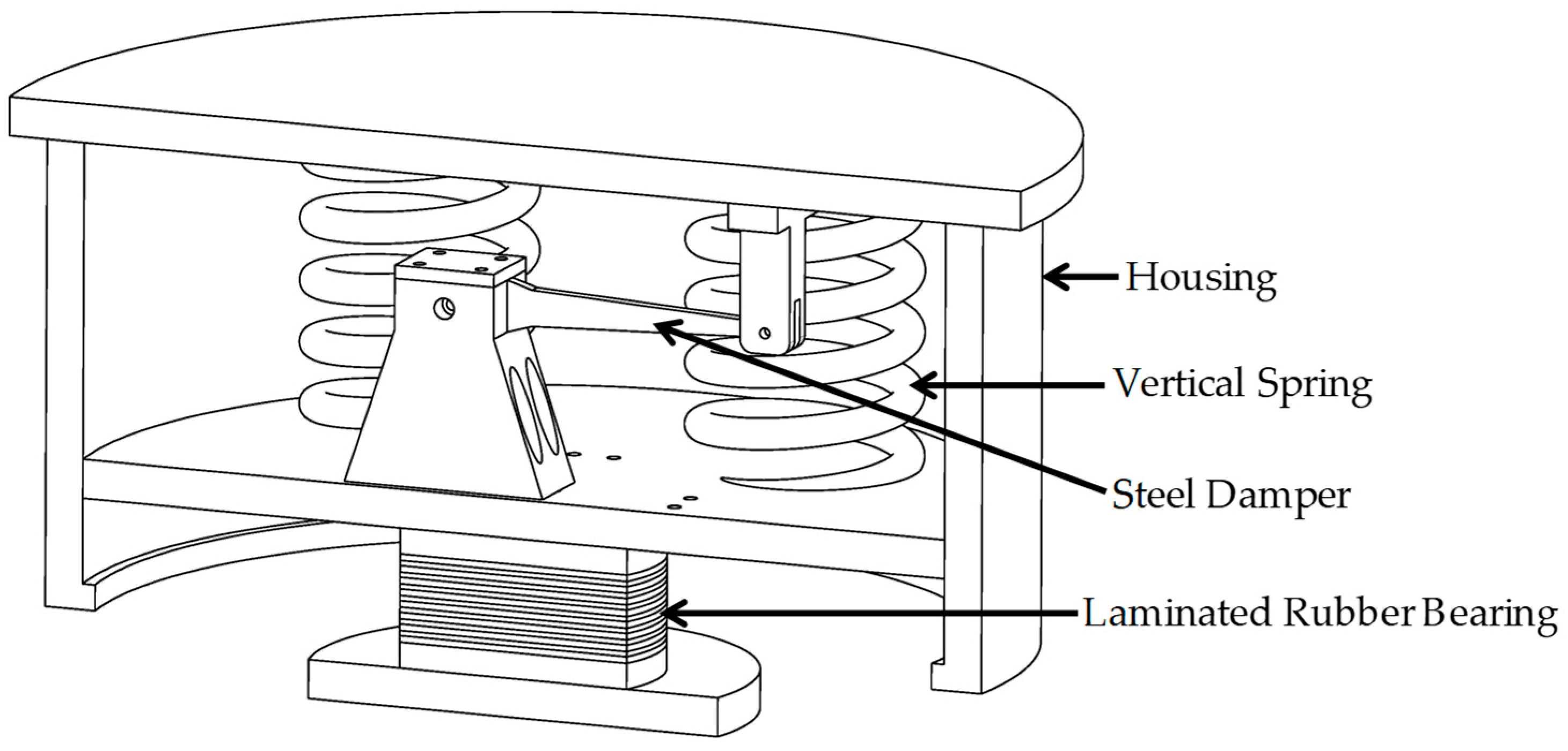
2. Concept of Vertical Seismic Isolation Device
2.1. Configurations and Dimensions
2.2. Vertical Design Displacement Limit
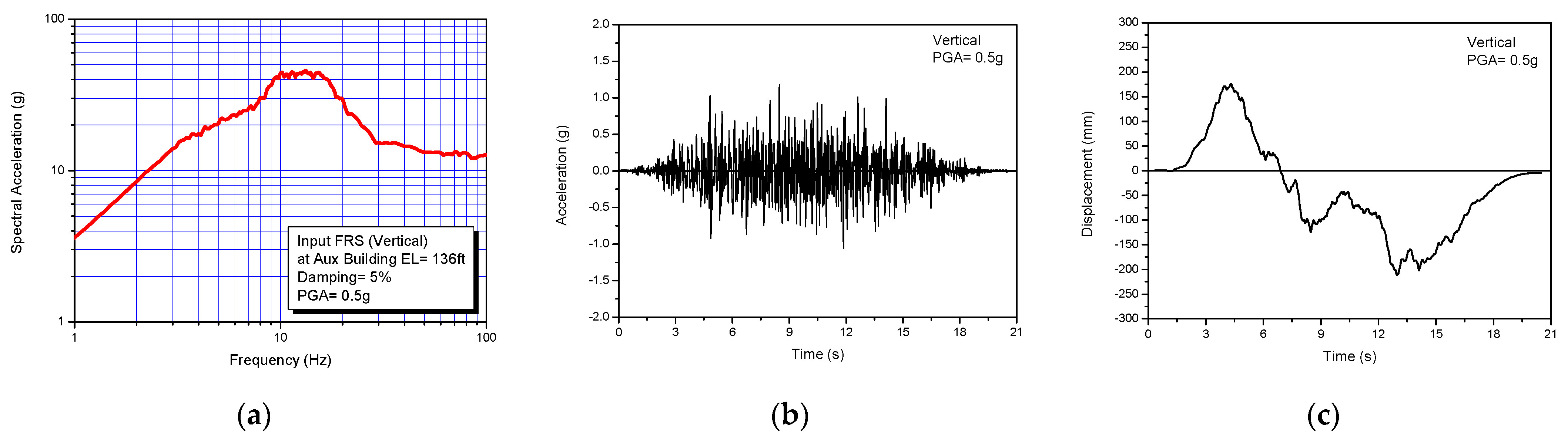
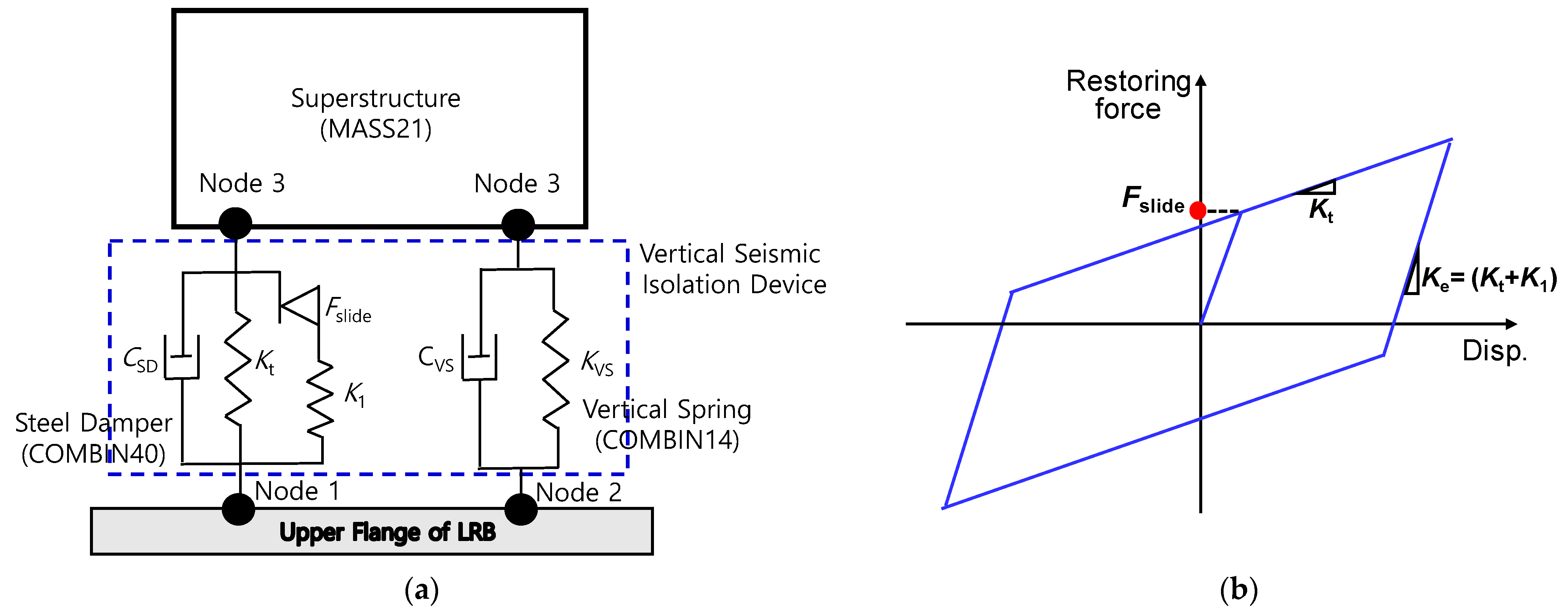
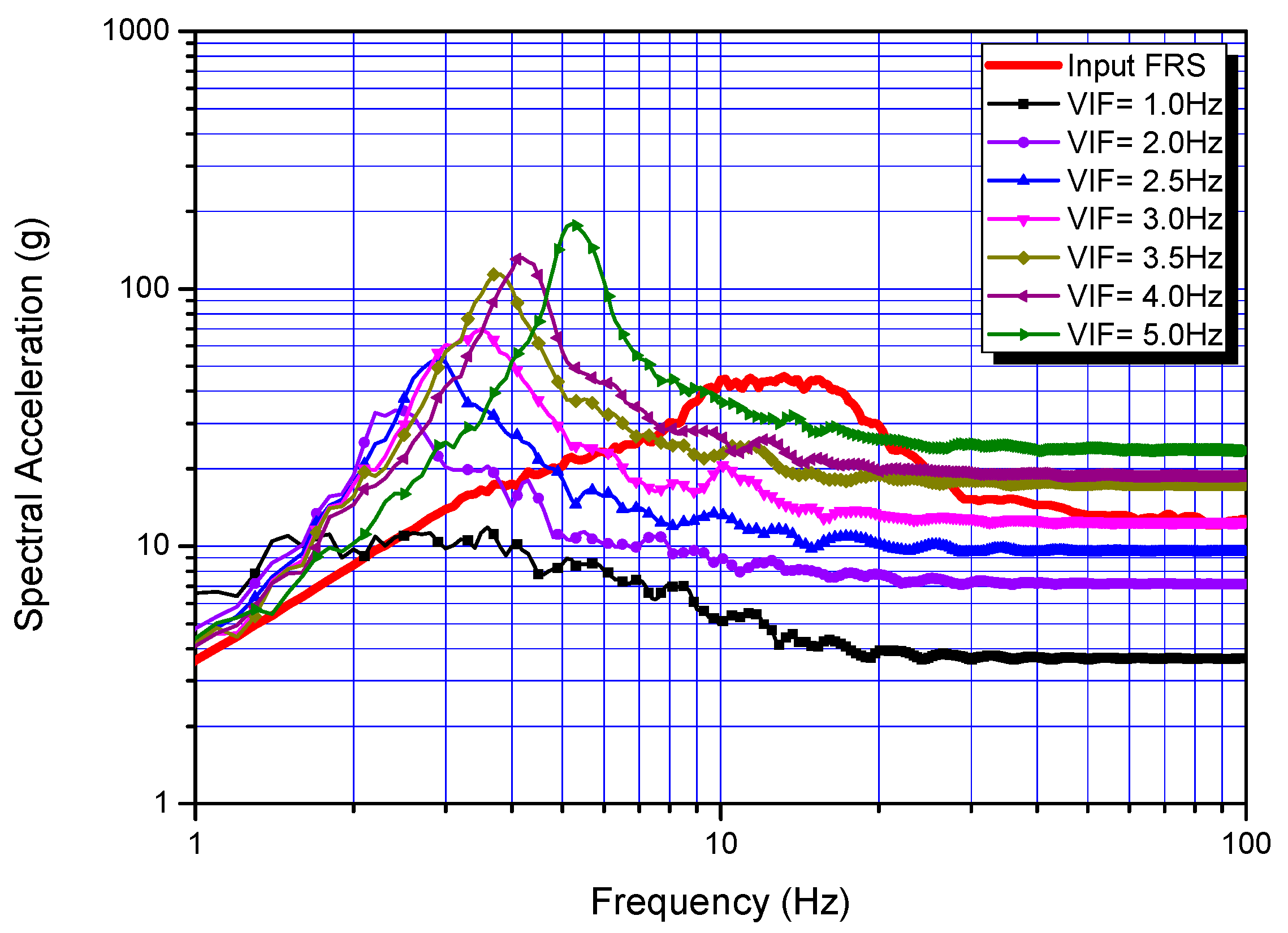
3. Sensitivity Study on Vertical Seismic Isolation Performance with VIF
4. Vertical Spring Design for Vertical Seismic Isolation Device
4.1. Disc Spring Design
4.2. Helical Coil Spring Design
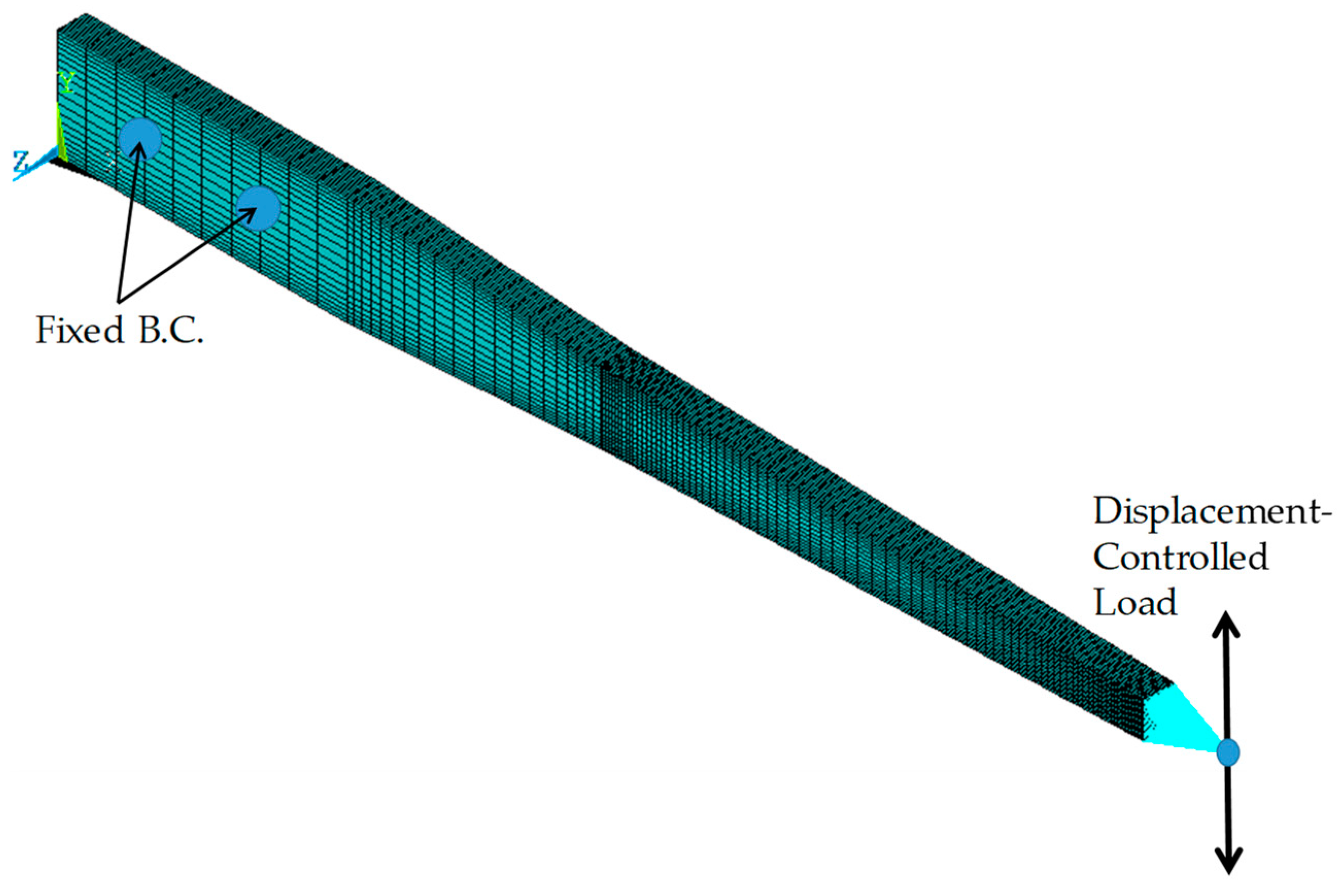
5. Design and Verification of Vertical Steel Damper
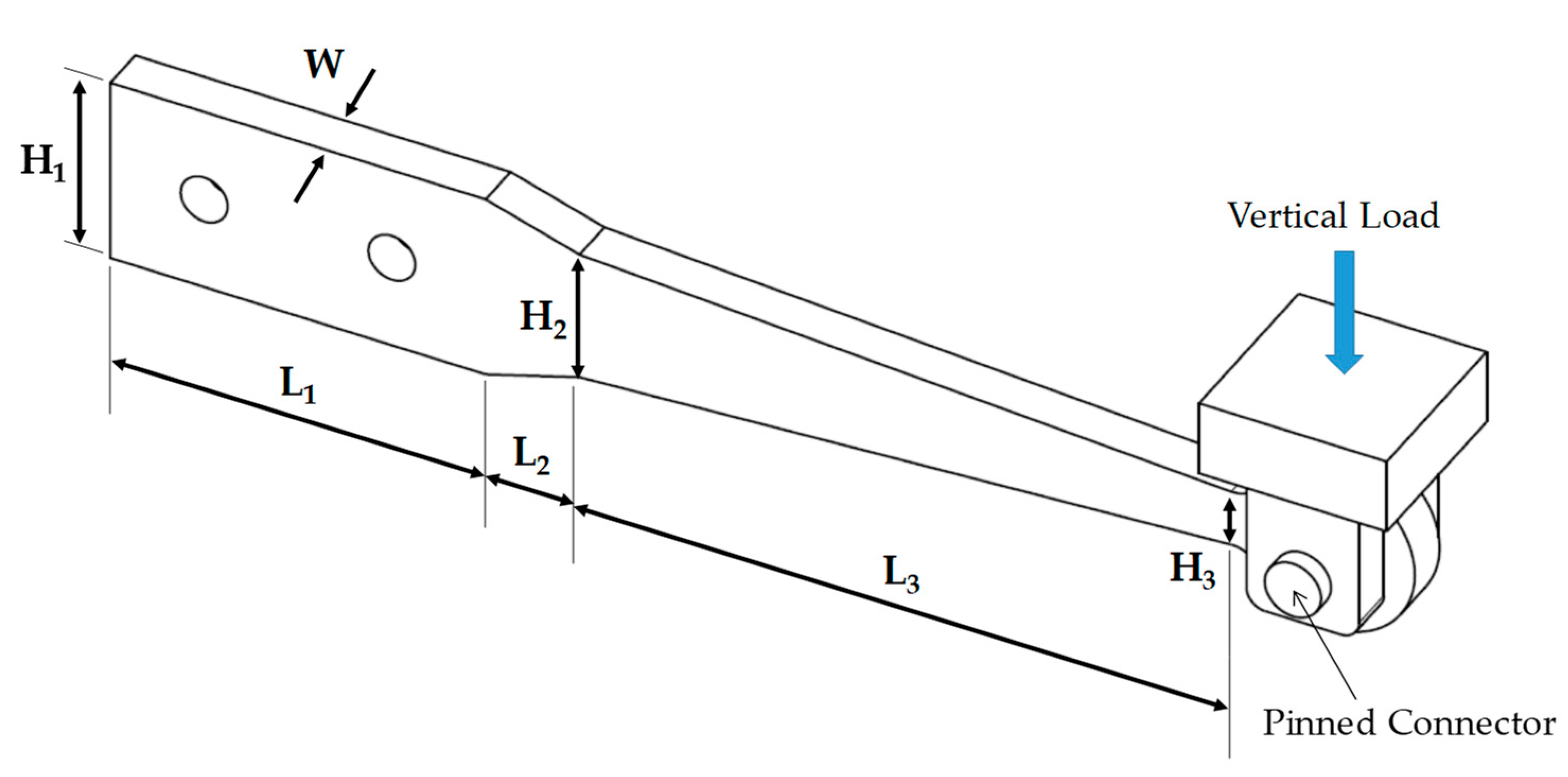
5.1. Design Configurations and Dimensions
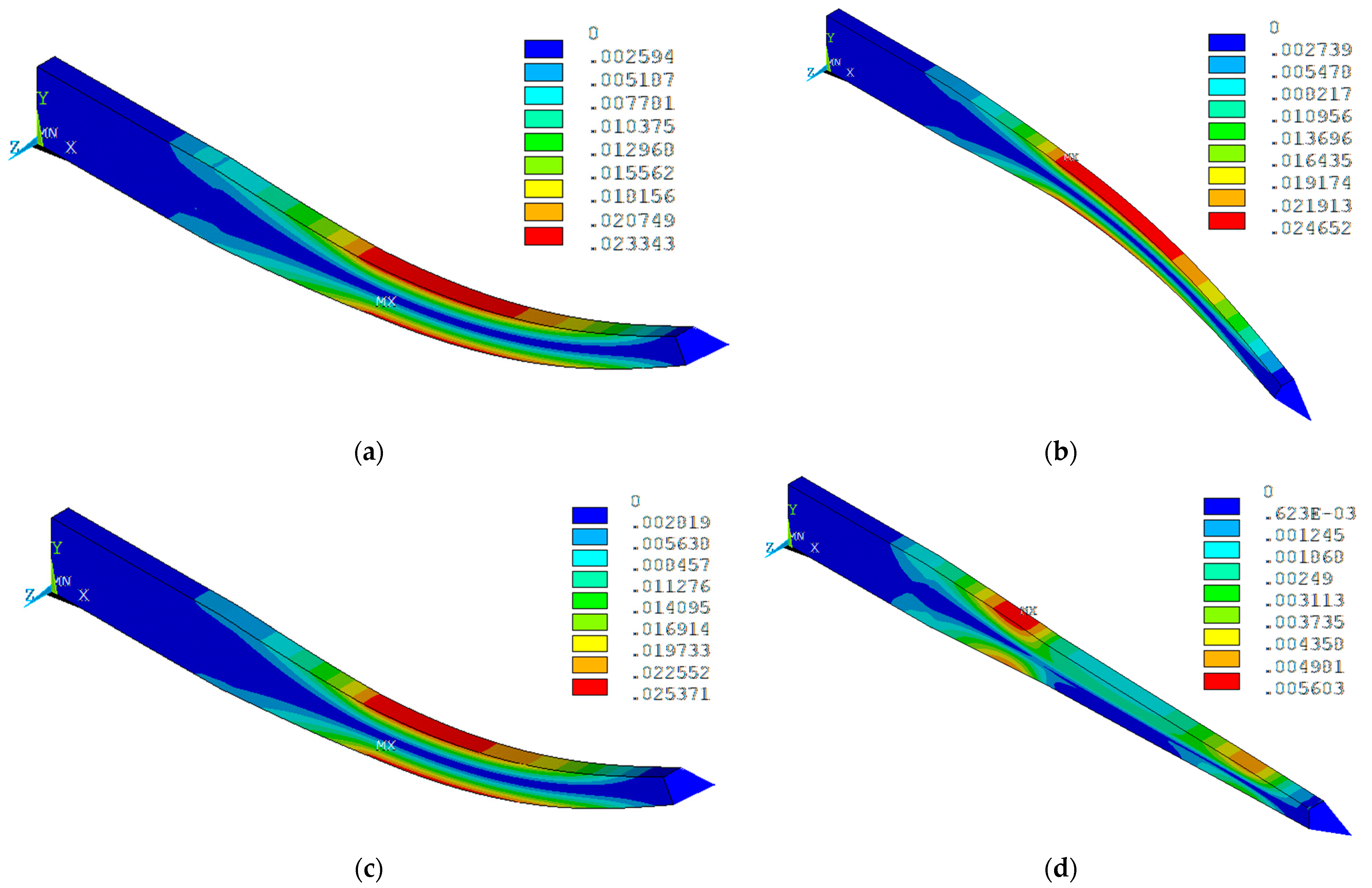
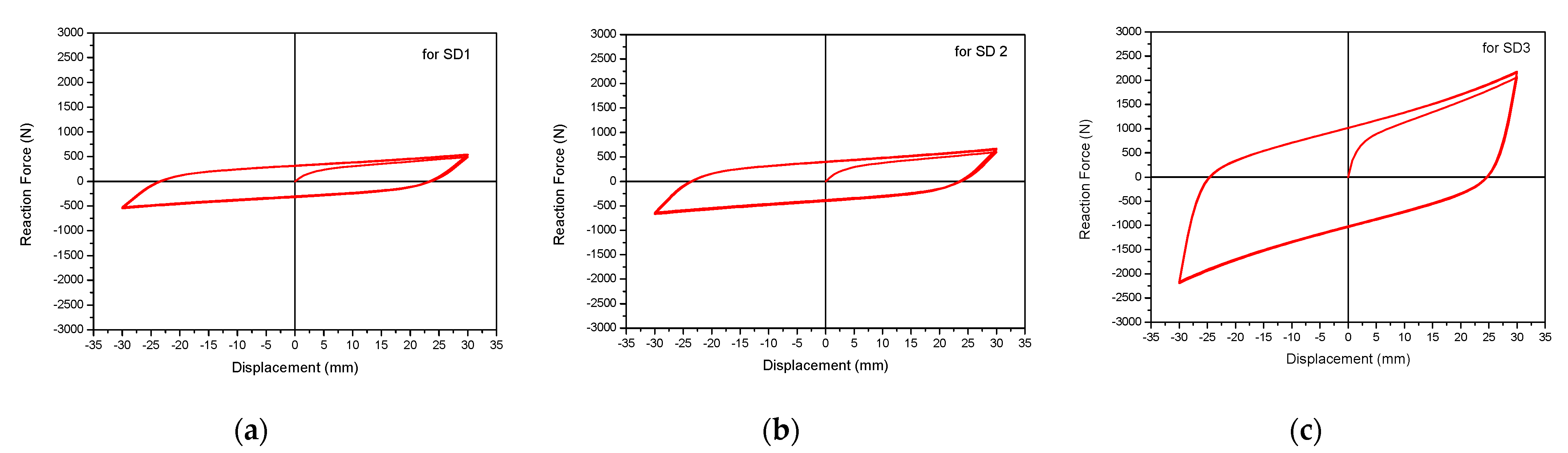
5.2. Evaluations of Energy Dissipation Performance
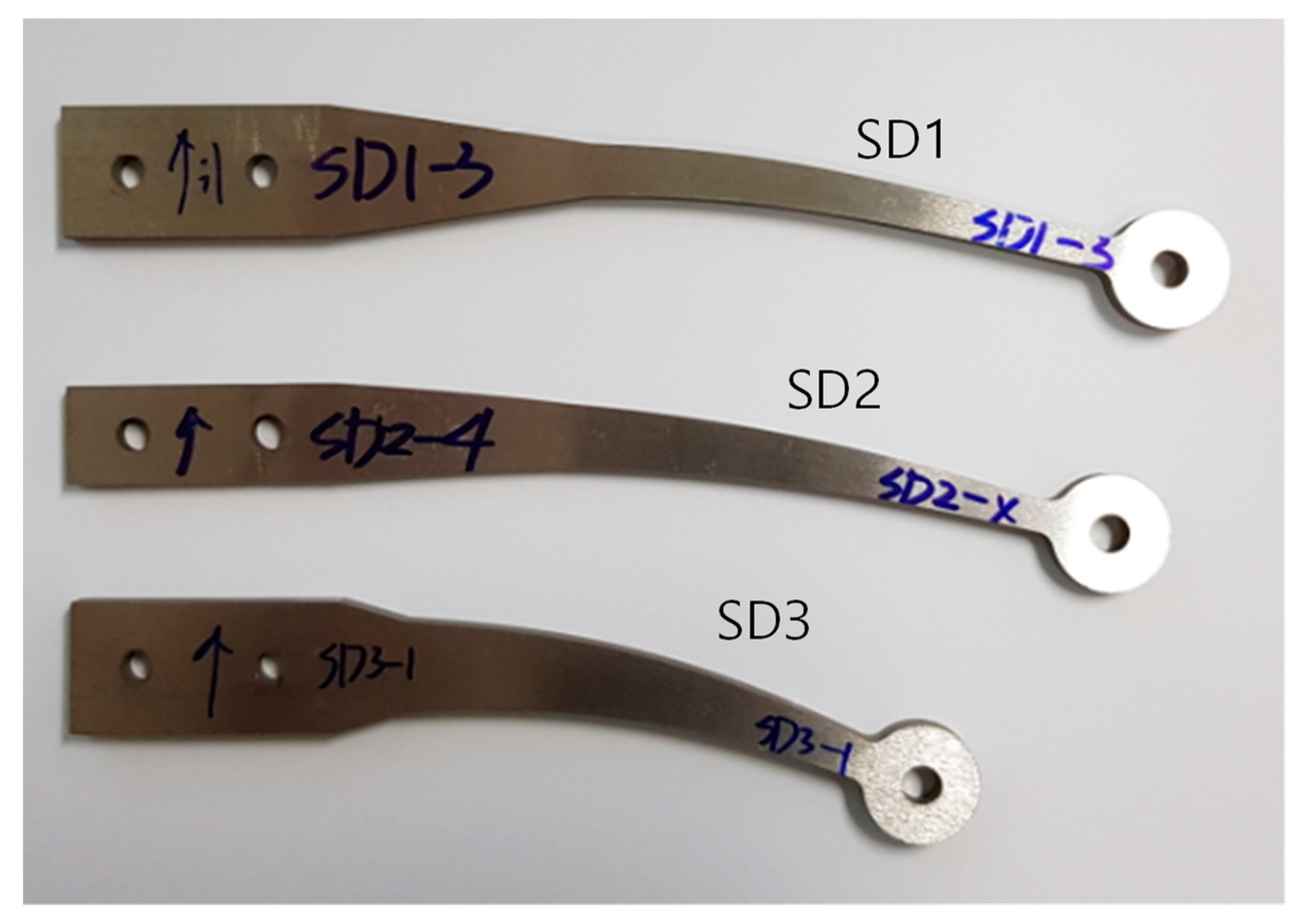
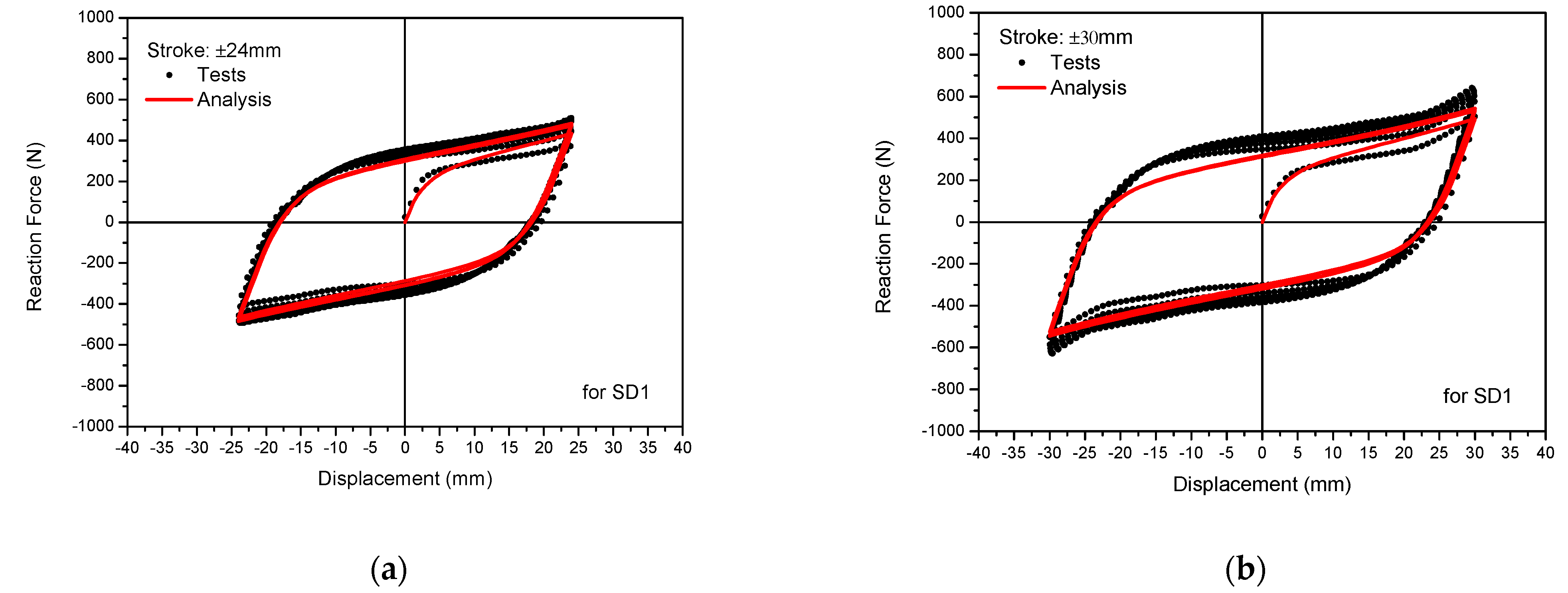
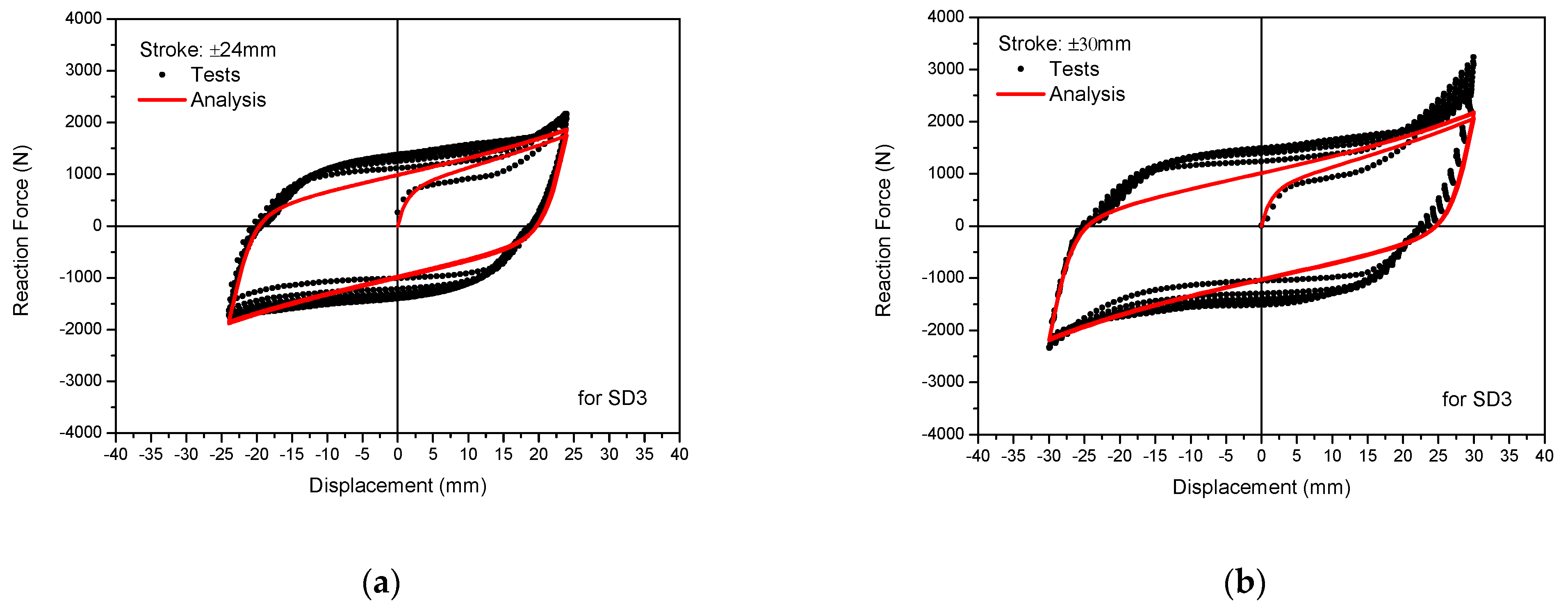
5.3. Verification Tests of Steel Damper Performance
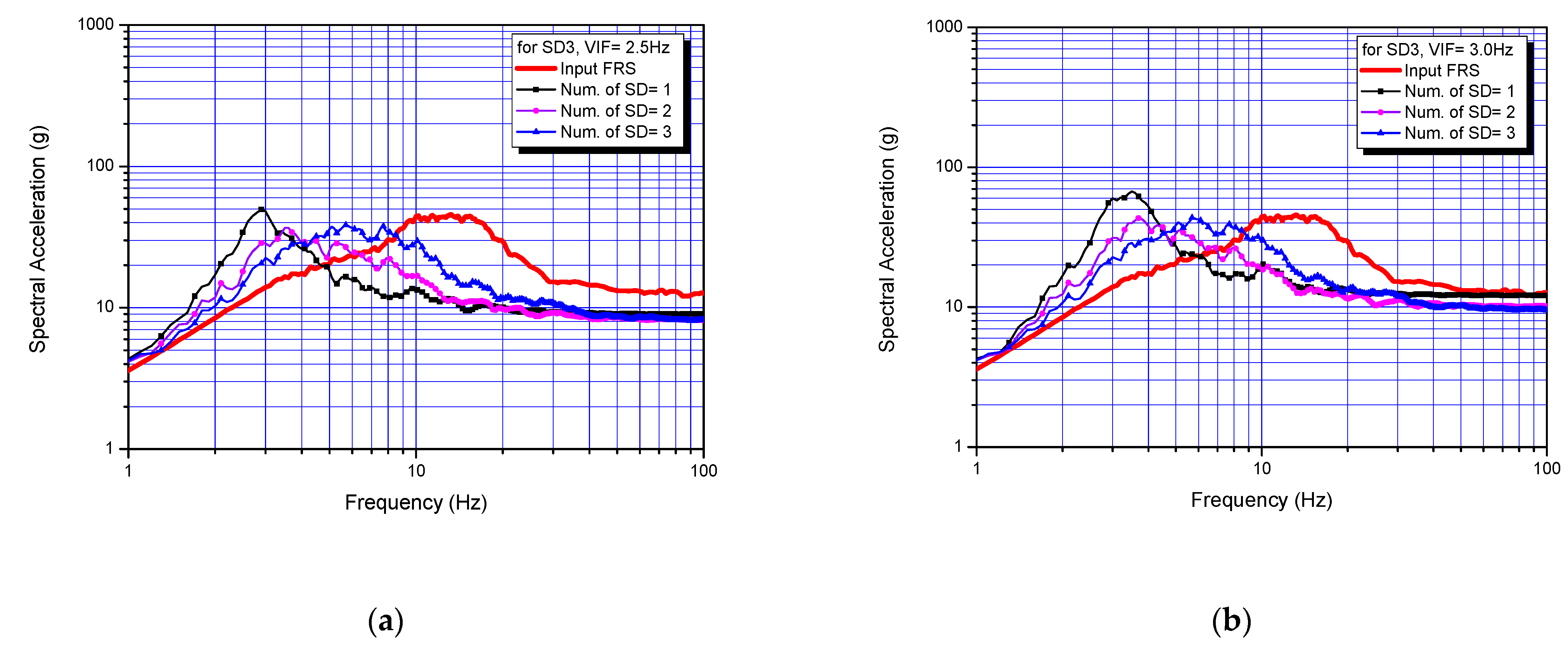
6. Evaluations of Vertical Seismic Isolation Performance
7. Conclusions
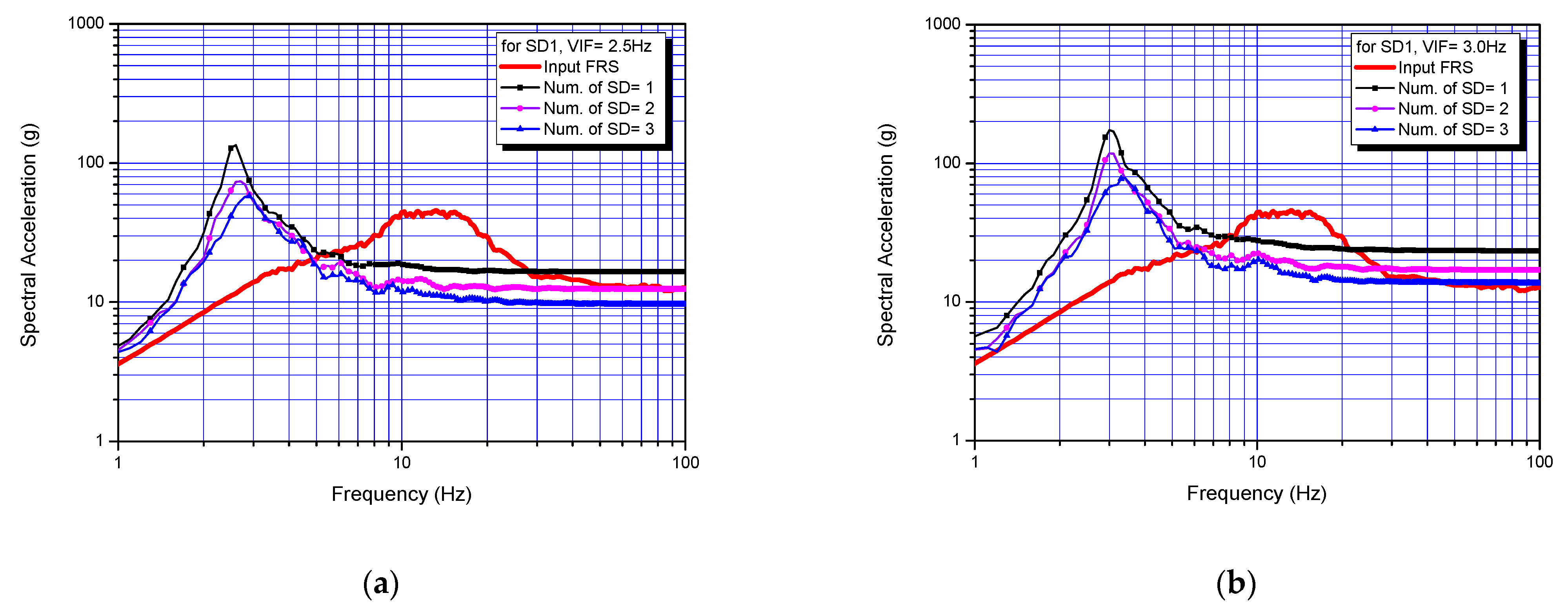
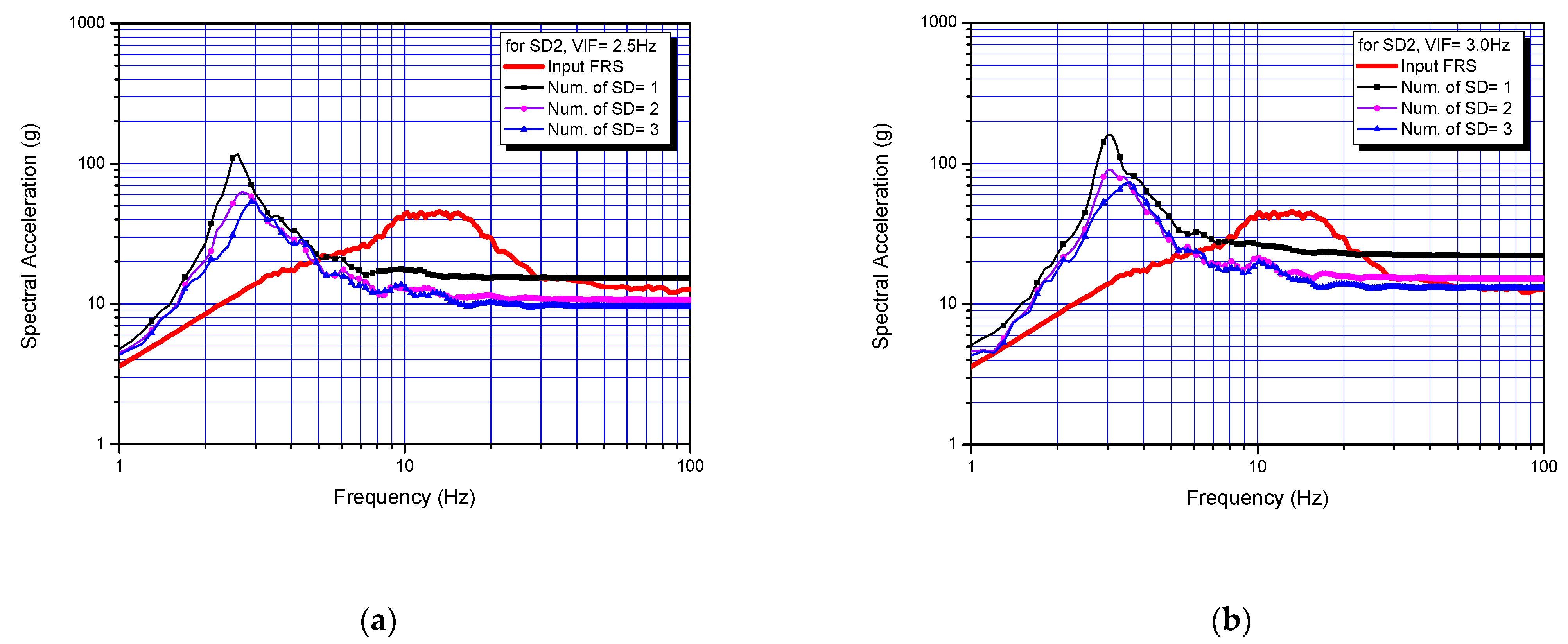
- The design VIF required for the design of the vertical seismic isolation device should be determined considering both seismic isolation performance and limitation of the vertical displacement of spring. In this study, the design VIF is recommended to be in the range of 2.5 Hz~3.0 Hz.
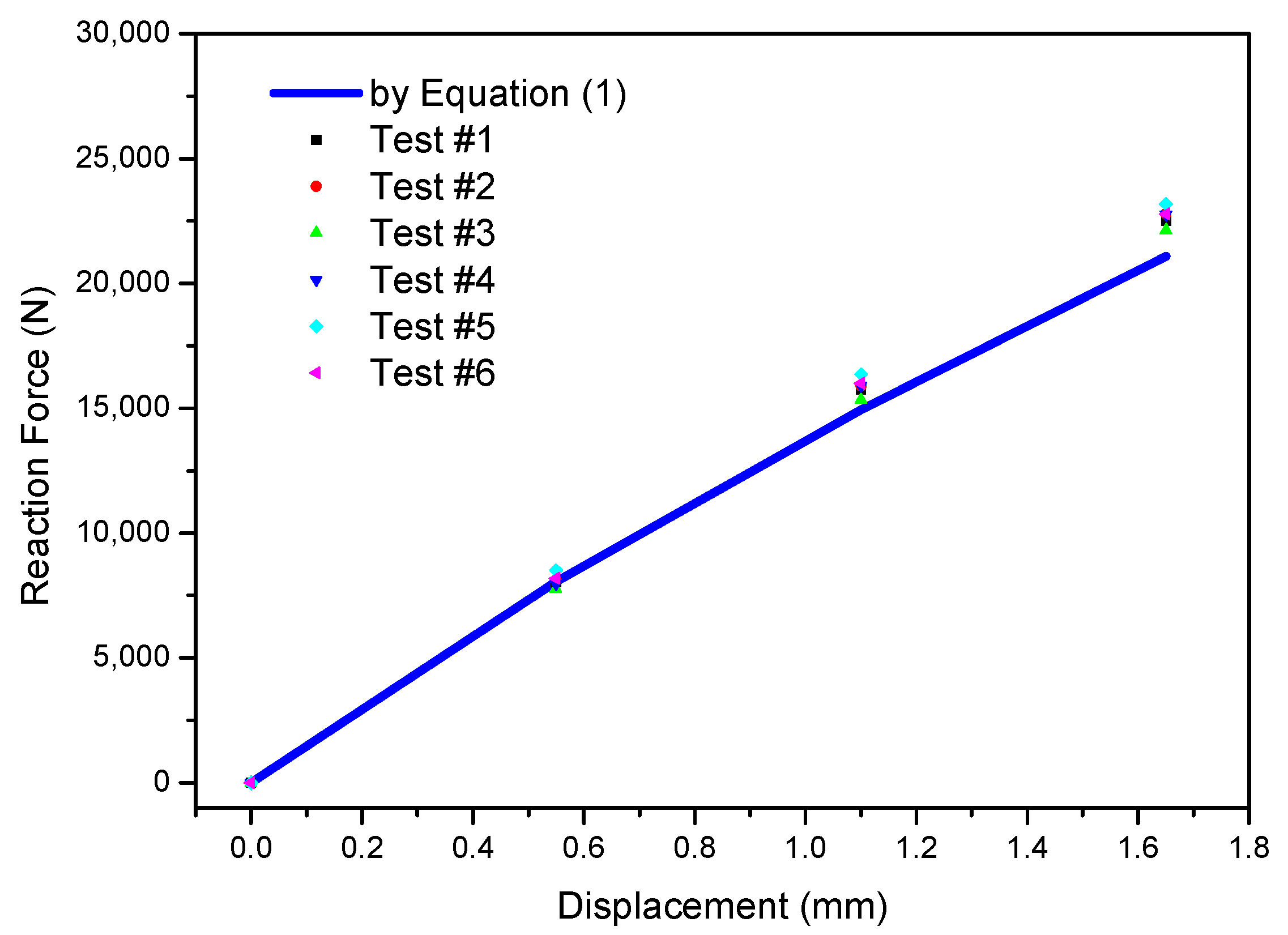
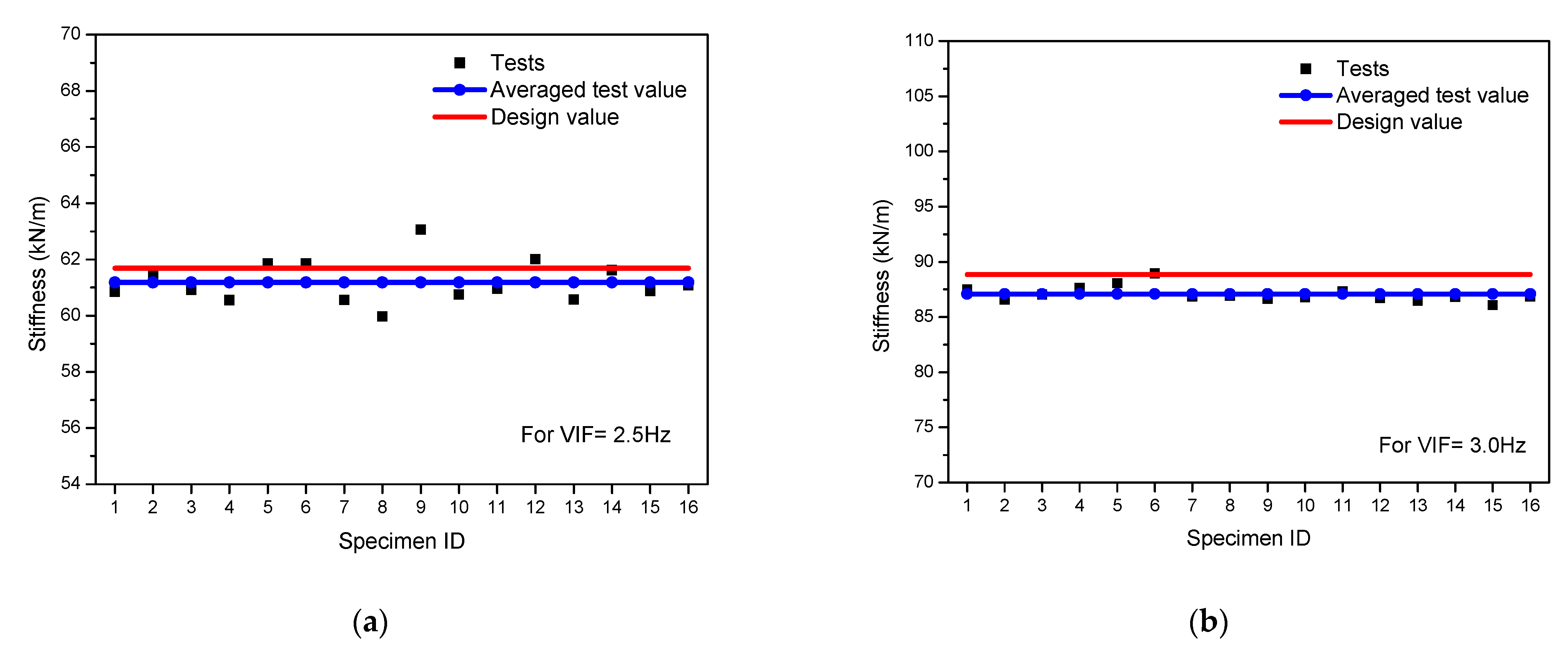
- It is confirmed that the disc spring and the helical coil spring are useful for a stiffness design of the vertical seismic isolation device for equipment. The validation of the design values obtained from the equation of a force and displacement relationship are verified by tests.
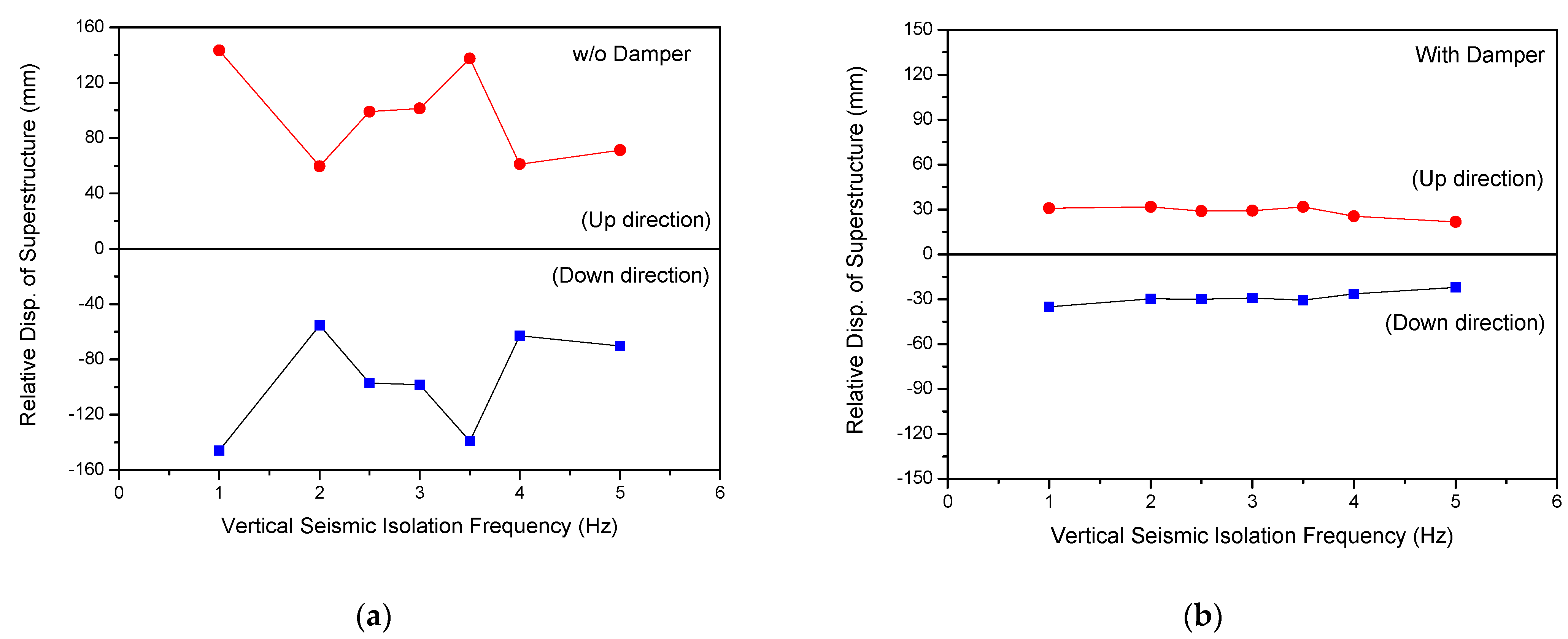
- With an appropriate steel damper design, the vertical displacement response can be limited to the design value. In this study, the vertical displacement response is limited to 40.5 mm (disc spring) and 37.5 mm (helical coil spring) for the design VIF = 2.5 Hz and 28.1 mm for the design VIF = 3.0 Hz, which are based on the static displacement by the design vertical load of 10 kN.
- It is verified that the designed three shapes of the steel dampers, SD1, SD2, and SD3 reveal the seismic energy dissipation performance over 30% critical damping ratio by tests and analyses.
- From the vertical seismic isolation performance analyses to find an adequate number of steel dampers satisfying the vertical displacement limits, it is found that the required number of steel dampers are at least five for SD1, four for SD2, and one for SD3.
- The optimal VIF should be determined with consideration of the frequency characteristics of the input design response spectrum at a specific floor where the equipment is seismically isolated and the vertical natural frequency characteristics of the superstructure.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pierre, L. Pioneering actual use of seismic isolation for nuclear facilities. In Proceedings of the 1st Kashiwasaki International Symposium on Seismic Safety of Nuclear Installation, Kashiwasaki, Japan, 26 November 2010. [Google Scholar]
- Kwag, S.Y.; Kwag, J.S.; Lee, H.H.; Oh, J.H.; Koo, G.H. Enhancement in the Seismic Performance of a Nuclear Piping System using Multiple Tuned Mass Dampers. Energies 2019, 12, 2077. [Google Scholar] [CrossRef] [Green Version]
- Kostarev, V.; Petrenko, A.; Vasilev, P. A New Method for Essential Reduction of Seismic and External Loads on NPP’s Structures, Systems and Components. In Proceedings of the 17th International Conference on SMiRT, Prague, Czech Republic, 17–22 August 2003. [Google Scholar]
- Germane, L. Seismic Isolation of the Jules Horowitz Reactor. In Proceedings of the 1st Kashiwasaki International Symposium on Seismic Safety of Nuclear Installation, Kashiwasaki, Niigata, Japan, 26 November 2010. [Google Scholar]
- Tajirian, F.F.; Schrag, M.R. Conceptual design of seismic isolation for the PRISM liquid metal reactor. In Proceedings of the Transactions of the 9th International Conference on Structural Mechanics in Reactor Technology, Switzerland, Lausanne, 17–21 August 1987; Volume K2, pp. 705–710. [Google Scholar]
- Okamura, S.; Kamishima, Y.; Negishi, K.; Sakamoto, Y.; Kitamura, S.; Kotake, S. Seismic isolation design for JSFR. J. Nucl. Sci. Technol. 2011, 48, 688–692. [Google Scholar] [CrossRef]
- Koo, G.H.; Kim, S.H.; Kim, J.B. Seismic Modeling and Analysis for Sodium-cooled Fast Reactor. Struct. Eng. Mech. 2012, 43, 475–502. [Google Scholar] [CrossRef]
- Morishita, M.; Kitamura, S.; Moro, S.; Kamishima, Y.; Takahiro, S. Study on 3-dimensional seismic isolation system for next generation nuclear power plant-vertical component isolation system with coned disk spring, Technical Report No. 620. In Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1–6 August 2004. [Google Scholar]
- Zhou, Z.; Wong, J.; Mahin, S. Potentiality of Using Vertical and Three-Dimensional Isolation Systems in Nuclear Structures. Nucl. Eng. Technol. 2016, 48, 1237–1251. [Google Scholar] [CrossRef] [Green Version]
- Tajirian, F.F.; Kelly, J.M.; Aiken, I.D.; Veljovich, W. Elastomeric bearings for three-dimensional seismic isolation. In Proceedings of the 1990 ASME PVP Conference, Nashville, TN, USA, 17–21 June 1990. [Google Scholar]
- Suhara, J. Research on 3D base isolation system applied to new power reactor 3D seismic isolation device with rolling seal type air spring: Part 1. In Proceedings of the SMiRT 17, Paper #K09e4, Prague, Czech Republic, 17–22 August 2003. [Google Scholar]
- Takahashi, O.; Aida, H.; Suhara, J.; Matsumoto, R.; Tsuyuki, Y.; Fujita, T. Construction of civil building using three dimensional seismic isolation system: Part 1, design of building using three dimensional seismic isolation system. In Proceedings of the 14th World Conference on Earthquake Engineering, Beijing, China, 12–17 October 2008. [Google Scholar]
- Ogiso, S.; Nakamura, K.; Suzuki, M.; Moro, S. Development of 3D seismic isolator using metallic bellows. In Proceedings of the 17th International Conference on Structural Mechanics in Reactor Technology (SMiRT 17), Prague, Czech Republic, 17–22 August 2003. [Google Scholar]
- Wong, J.; Lakshmipath, L.; Armas, P.J.; Paredes, A.E.; Park, C.; Campos, J.A. Design and Small-Scale Testing of 3D Printed Seismic Isolators. In Proceedings of the 2019 American Society for Engineering Education 126th Annual Conference & Exposition, Tampa, FL, USA, 15 June 2019. [Google Scholar]
- Okada, Y.; Suhara, J.; Tamura, T.; Ohta, K.; Moro, S. Development of Three Dimensional Seismic Isolation Device with Laminated Rubber Bearing and Rolling Seal Type Air Spring. In Proceedings of the GENES4/ANP2003, Kyoto, Japan, 15–19 September 2003. [Google Scholar]
- Koo, G.H.; Jung, J.Y.; Lee, J.H.; Shin, T.M. Development of Small-Sized Lead Inserted Laminated Rubber Bearing for Nuclear Component Seismic Isolation. Energies 2020, 13, 3193. [Google Scholar] [CrossRef]
- Koo, G.H.; Shin, T.M.; Ma, S.J. Shaking Table Tests of Lead Inserted Small-Sized Laminated Rubber Bearing for Nuclear Component Seismic Isolation. Appl. Sci. 2021, 11, 4431. [Google Scholar] [CrossRef]
- Sheikhi, J.; Fathi, M. Natural Rubber Bearing Incorporated with Steel Ring Damper (NRB-SRD). Int. J. Steel Struct. 2020, 20, 23–34. [Google Scholar] [CrossRef]
- Asgari, A.; Osma, S.A.; Azlan, A. Application of HDR Dampers in Seismic Protection of LRB-Controlled Cable-Stayed Bridges. In Proceedings of the Istanbul Bridge Conference, Istanbul, Turkey, 11–13 August 2014. [Google Scholar]
- Roh, J.E.; Hur, M.W.; Choi, H.H.; Lee, S.H. Development of a Multiaction Hybrid Damper for Passive Energy Dissipation. Shock. Vib. 2018, 2018. [Google Scholar] [CrossRef] [Green Version]
- Dolati, S.S.K.; Mehrabi, A.; Dolati, S.S.K. Application of Viscous Damper and Laminated Rubber Bearing Pads for Bridges in Seismic Regions. Metals 2021, 11, 1666. [Google Scholar] [CrossRef]
- Nuclear Regulatory Commission. Design Response Spectra for Seismic Design of Nuclear Power Plants; Regulatory Guide 1.60; Nuclear Regulatory Commission: Rockville, MD, USA, 1973. [Google Scholar]
- ANSYS Mechanical APDL Release 15.0; ANSYS, Inc.: Canonsburg, PA, USA, 2013.
- Norton, R.L. Machine Design, An Integrated Approach; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Chaboche, J.L.; Rousselier, G. On the plastic and viscoplastic constitutive equations—Part II: Application of internal variable concepts to the 316 stainless steel. J. Press. Vessel. Technol. 1983, 105, 159–164. [Google Scholar] [CrossRef]
- Chaboche, J.L. Constitutive equations for cyclic plasticity and cyclic viscoplasticity. Int. J. Plast. 1989, 5, 247–302. [Google Scholar] [CrossRef]
- Voce, E. A Practical Strain hardening Function. Metallurgia 1955, 51, 219–226. [Google Scholar]
- Koo, G.H.; Yoon, J.H. Inelastic Material Models of Type 316H for Elevated Temperature Design of Advanced High Temperature Reactors. Energies 2020, 13, 4548. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Isolation Devices | Design Parameters | Design Value |
|---|---|---|
| Horizontal Seismic Isolation Device (LRB) | Outer diameter (mm) | 100 |
| Lead plug diameter (mm) | 21.5 | |
| Total LRB height (mm) | 34 | |
| Shape factor (S1, S2) | 9.9, 5.0 | |
| Design vertical load (kN) | 10 | |
| Design shear disp. (mm) | 35 (175%) | |
| Beyond design shear disp. (mm) | 80 (400%) | |
| Vertical Seismic Isolation Device | Housing diameter (mm) | 450 |
| Total height (mm) | 140~360 | |
| Design vertical load (kN) | 10 |
| Design VIF (Hz) | Required Vertical Stiffness (kN/m) | Static Disp. for 10 kN (mm) |
|---|---|---|
| 1.0 | 39.5 | 253.3 |
| 2.0 | 157.9 | 63.3 |
| 2.5 | 246.7 | 40.5 |
| 3.0 | 355.3 | 28.1 |
| 3.5 | 483.6 | 20.7 |
| 4.0 | 631.7 | 15.8 |
| 5.0 | 987.0 | 10.1 |
| Parameters | Values |
|---|---|
| Superstructure mass (kg) | 1000 |
| Stiffness of vertical spring, KVS (N/m) | Variable depending on VIF |
| Damping of vertical spring, CVS (kg/s) | 62.8 |
| Elastic stiffness of steel damper, Ke (N/m) | 621,700 |
| Tangential stiffness of steel damper, Kt (N/m) | 36,460 |
| Characteristic strength, Fslide (N) | 990 |
| Struct. Damping of steel damper, CSD (kg/s) | 0 |
| Design VIF (Hz) | Effective Frequency Range (Hz) | ZPA 1 Response (g) | Max. Displacement (mm) | VIF with Damper (Hz) | |
|---|---|---|---|---|---|
| Without Damper | With Damper | ||||
| 1.0 | 2.6< | 0.37 | +143.4/−146.0 | +30.8/−35.1 | 1.8 |
| 2.0 | 4.2< | 0.73 | +59.7/−55.3 | +31.7/−29.8 | 2.4 |
| 2.5 | 5.0< | 0.97 | +99.2/−97.0 | +28.9/−30.0 | 2.9 |
| 3.0 | 6.2~80.0 | 1.27 | +101.3/−98.3 | +29.2/−29.3 | 3.5 |
| 3.5 | 7.5~26.0 | 1.78 | +137.6/−139.0 | +31.7/−30.7 | 3.8 |
| 4.0 | 8.0~24.0 | 1.91 | +61.2/−62.9 | +25.6/−26.5 | 4.2 |
| 5.0 | 9.5~20.0 | 2.40 | +71.2/−70.4 | +21.6/−22.1 | 5.2 |
| Design Parameters of Disc Spring | Values |
|---|---|
| Outer diameter, D (mm) | 80 |
| Inner diameter, d (mm) | 41 |
| Thickness, t (mm) | 4 |
| Shut displacement, h (mm) | 2.2 |
| Height, H(=t + h) (mm) | 6.2 |
| Design vertical load, F (kN) | 10 |
| Young’s modulus, E (GPa) | 190 |
| Poisson ratio, ν | 0.27 |
| Design VIF (Hz) | Required Stiffness (kN/m) | Required Number of Disc Spring 1 | Total Height 1 (mm) | Total Shut Disp. (mm) | Static Disp. for 10 kN (mm) |
|---|---|---|---|---|---|
| 1.0 | 39.5 | 352 | 2182 | 1408 | 253.3 |
| 2.0 | 157.9 | 88 | 546 | 352 | 63.3 |
| 2.5 | 246.7 | 58 | 360 | 232 | 40.5 |
| 3.0 | 355.3 | 40 | 248 | 160 | 28.1 |
| 3.5 | 483.6 | 30 | 186 | 120 | 20.7 |
| 4.0 | 631.7 | 22 | 136 | 88 | 15.8 |
| 5.0 | 987.0 | 16 | 99 | 64 | 10.1 |
| Design VIF (Hz) | Required Stiffness (kN/m) | Number of Spring 1 | Required Number of Coil Turns | Total Height (mm) | Total Shut Displacement (mm) |
|---|---|---|---|---|---|
| 1.0 | 39.5 | 4 | 29 | 880 | 368 |
| 2.0 | 157.9 | 4 | 7.5 | 230 | 110 |
| 2.5 | 246.7 | 4 | 5 | 160 | 78 |
| 3.0 | 355.3 | 4 | 3.5 | 135 | 60 |
| 3.5 | 483.6 | 4 | 2.5 | 100 | 50 |
| 4.0 | 631.7 | 4 | 1.8 | 90 | 45 |
| 5.0 | 987.0 | 4 | - | - | - |
| Design Parameters | Values | |
|---|---|---|
| VIF = 2.5 Hz | VIF = 3.0 Hz | |
| Outer diameter, Do (mm) | 100 | 100 |
| Coil diameter, d (mm) | 12 | 12 |
| Mean spring diameter, D = Do − d (mm) | 88 | 88 |
| Number of coil turns, Na | 5 | 3.5 |
| Pitch, p (mm) | 27.20 | 31.71 |
| Total height, Lf (mm) | 160 | 135 |
| Assembled height, La (mm) | 119.47 | 106.86 |
| Minimum height, Lm, (mm) | 78 | 60 |
| Shear modulus, G (GPa) | 75 | 75 |
| Spring constant, K (kN/m) | 61.69 | 88.83 |
| Steel Damper ID | L1 | L2 | L3 | H1 | H2 | H3 | W |
|---|---|---|---|---|---|---|---|
| SD1 | 40 | 40 | 80 | 20 | 8 | 5 | 5 |
| SD2 | 40 | 35 | 75 | 15 | 10 | 5 | 4 |
| SD3 | 40 | 10 | 70 | 20 | 14 | 6 | 5 |
| Material | σyo (MPa) | E (GPa) | C1 × 109 | C2 × 109 | C3 × 109 | γ1 × 103 | γ2 × 103 | γ3 | b | Q × 106 |
|---|---|---|---|---|---|---|---|---|---|---|
| Type 316SS | 135 | 190 | 120 | 20.2 | 10.67 | 1.0 | 1.0 | 1.0 | 45.0 | 85 |
| Steel Damper ID | Kt (kN/m) | Ke (kN/m) | Fslide (N) | W1 (N·m) | Critical Damping Ratio (%) |
|---|---|---|---|---|---|
| SD1 | 7.21 | 100.82 | 330.64 | 25.44 | 35.17 |
| SD2 | 9.00 | 127.21 | 413.24 | 31.87 | 35.25 |
| SD3 | 37.00 | 695.77 | 1064.61 | 90.60 | 31.70 |
| Item | Performance |
|---|---|
| Facility model name | INSTRON 5982 |
| Max. loading (kN) | 100 |
| Footprint dimensions (mm) | 1130 × 777 |
| Height (mm) | 2273 |
| Control axes | 1 |
| Max. displacement (mm) | 1330 |
| Min. speed (mm/min) | 0.0001 |
| Max. speed (mm/min) | 1016 |
| Excitation mechanism | Brush DC Motor |
| Control software | INSTRON Bluehill 3 |
| Steel Damper ID | # of Dampers | Peak Vertical Seismic Disp. Response (mm) | (Dsd − Ddw) (1) for Disc Spring (mm) | (Dsd − Ddw) (1) for Helical Coil Spring (mm) | Vertical Disp. Limits (mm) | ||||
|---|---|---|---|---|---|---|---|---|---|
| VIF = 2.5 Hz | VIF = 3.0 Hz | 2.5 Hz | 3.0 Hz | 2.5 Hz | 3.0 Hz | 2.5 Hz | 3.0 Hz | ||
| SD1 | 1 | −63.6/+62.1 | −63.2/+63.7 | 86.5 | 59.9 | 37.5 | 32.0 | 40.5 (2) | 28.1 |
| 2 | −45.1/+41.8 | −44.3/+42.7 | |||||||
| 3 | −30.9/+32.1 | −33.5/+33.6 | |||||||
| 4 | −29.8/+28.2 | −29.0/+30.5 | |||||||
| 5 | −25.9/+25.7 | −26.1/+27.9 | |||||||
| SD2 | 1 | −57.8/+55.0 | −59.8/+59.7 | 86.5 | 59.9 | 37.5 | 32.0 | 40.5 (2) | 28.1 |
| 2 | −37.2/+36.3 | −38.6/+33.6 | |||||||
| 3 | −30.2/+28.7 | −29.7/+30.6 | |||||||
| 4 | −25.8/+25.6 | −26.0/+27.8 | |||||||
| SD3 | 1 | −28.0/+27.9 | −27.9/+28.3 | 86.5 | 59.9 | 37.5 | 32.0 | 40.5 (2) | 28.1 |
| 2 | −18.9/+17.8 | −16.4/+18.7 | |||||||
| 3 | −13.6/+9.9 | −13.3/+10.5 | |||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koo, G.-H.; Jung, J.-Y.; Hwang, J.-K.; Shin, T.-M.; Lee, M.-S. Vertical Seismic Isolation Device for Three-Dimensional Seismic Isolation of Nuclear Power Plant Equipment—Case Study. Appl. Sci. 2022, 12, 320. https://doi.org/10.3390/app12010320
Koo G-H, Jung J-Y, Hwang J-K, Shin T-M, Lee M-S. Vertical Seismic Isolation Device for Three-Dimensional Seismic Isolation of Nuclear Power Plant Equipment—Case Study. Applied Sciences. 2022; 12(1):320. https://doi.org/10.3390/app12010320
Chicago/Turabian StyleKoo, Gyeong-Hoi, Jin-Young Jung, Jong-Keun Hwang, Tae-Myung Shin, and Min-Seok Lee. 2022. "Vertical Seismic Isolation Device for Three-Dimensional Seismic Isolation of Nuclear Power Plant Equipment—Case Study" Applied Sciences 12, no. 1: 320. https://doi.org/10.3390/app12010320