
Design of the Crawler Units: Toward the Development of a Novel Hybrid Platform for Infrastructure Inspection



Abstract
:1. Introduction
2. Materials and Methods
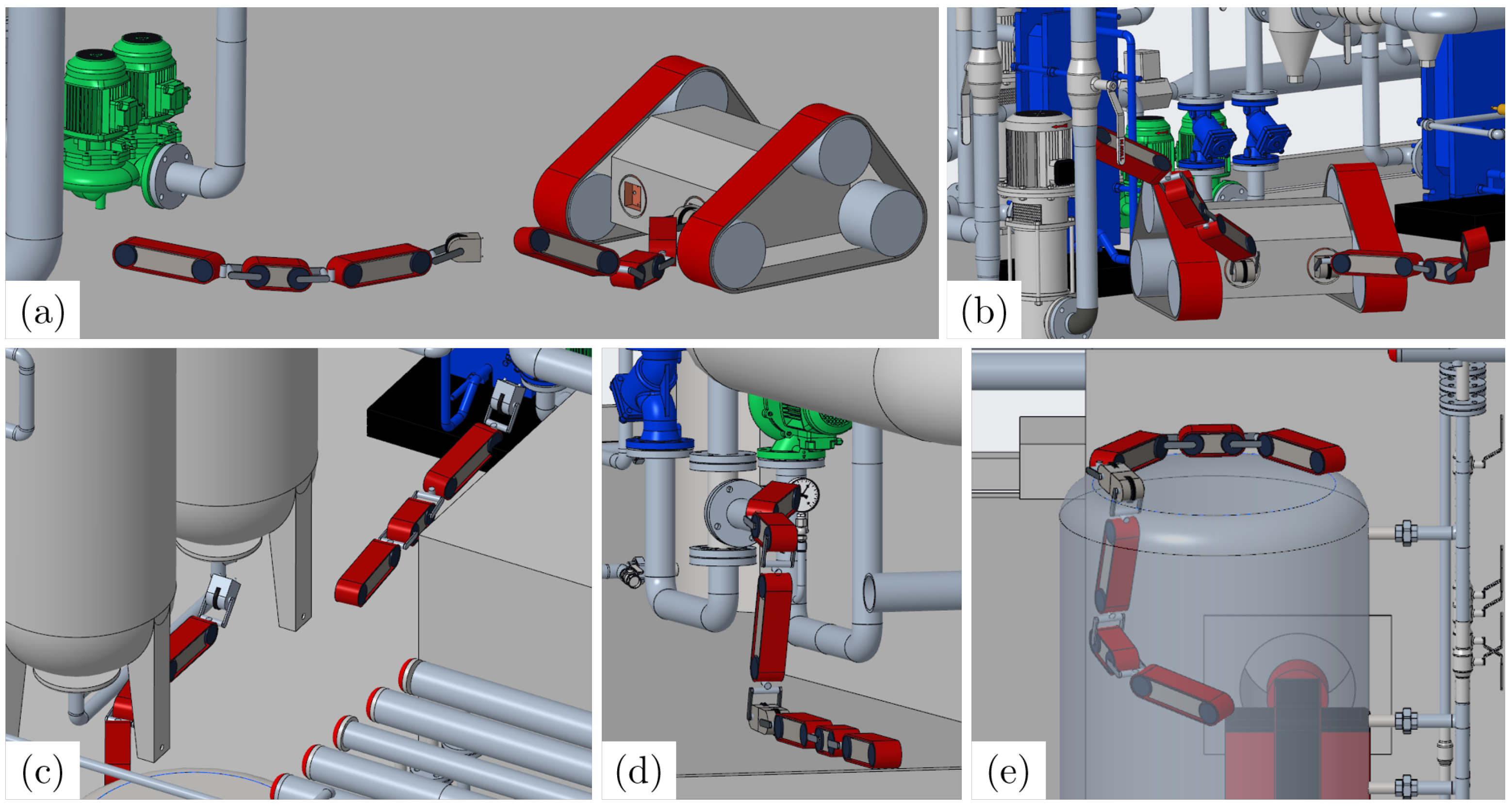
2.1. The Hybrid Platform Overview
2.2. The Crawler Unit: Overview
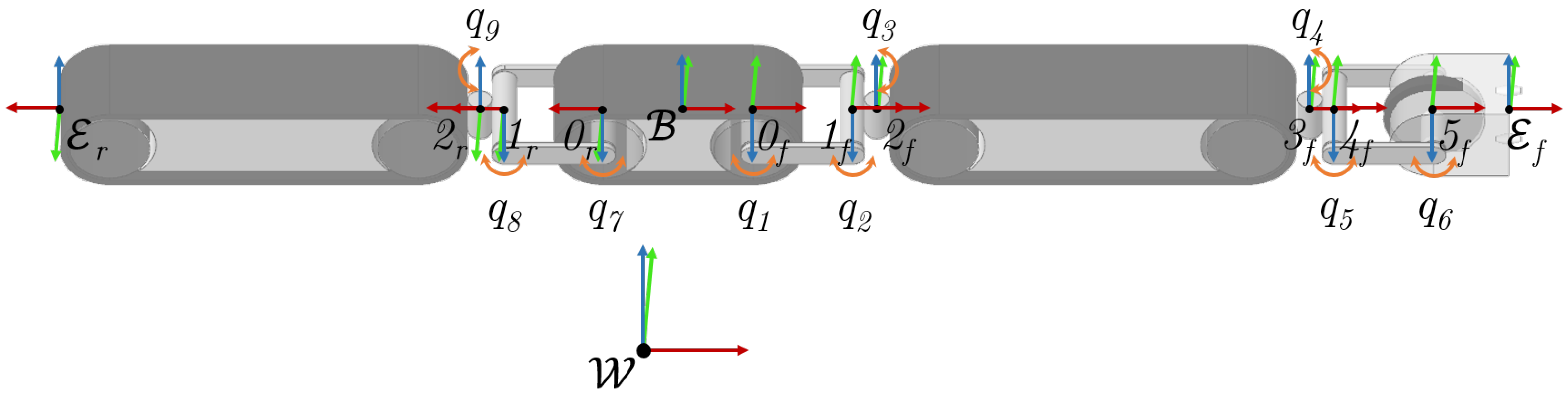
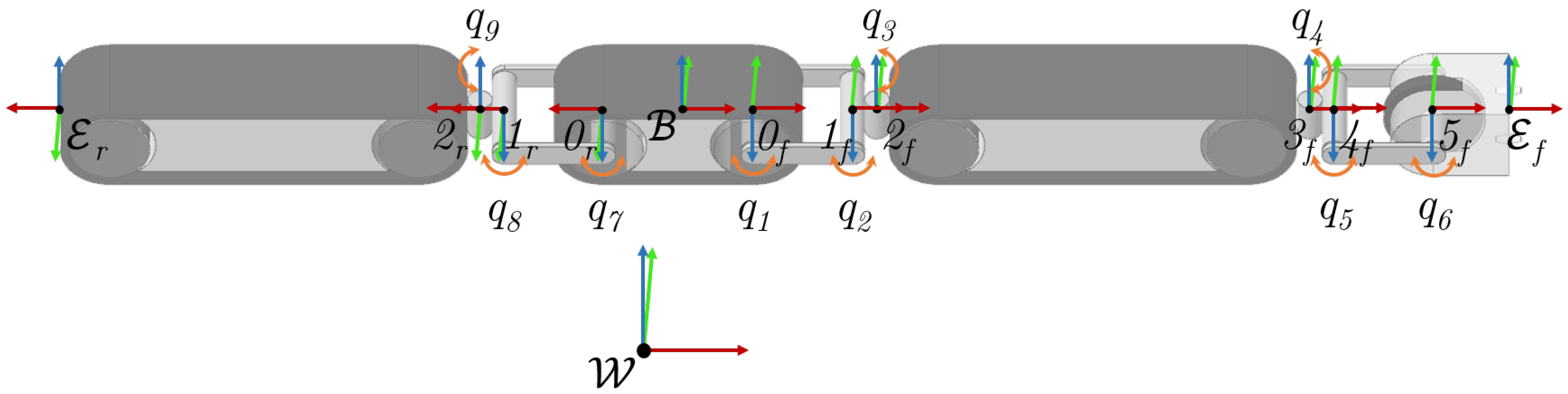
2.3. The Crawler Unit: Kinematics
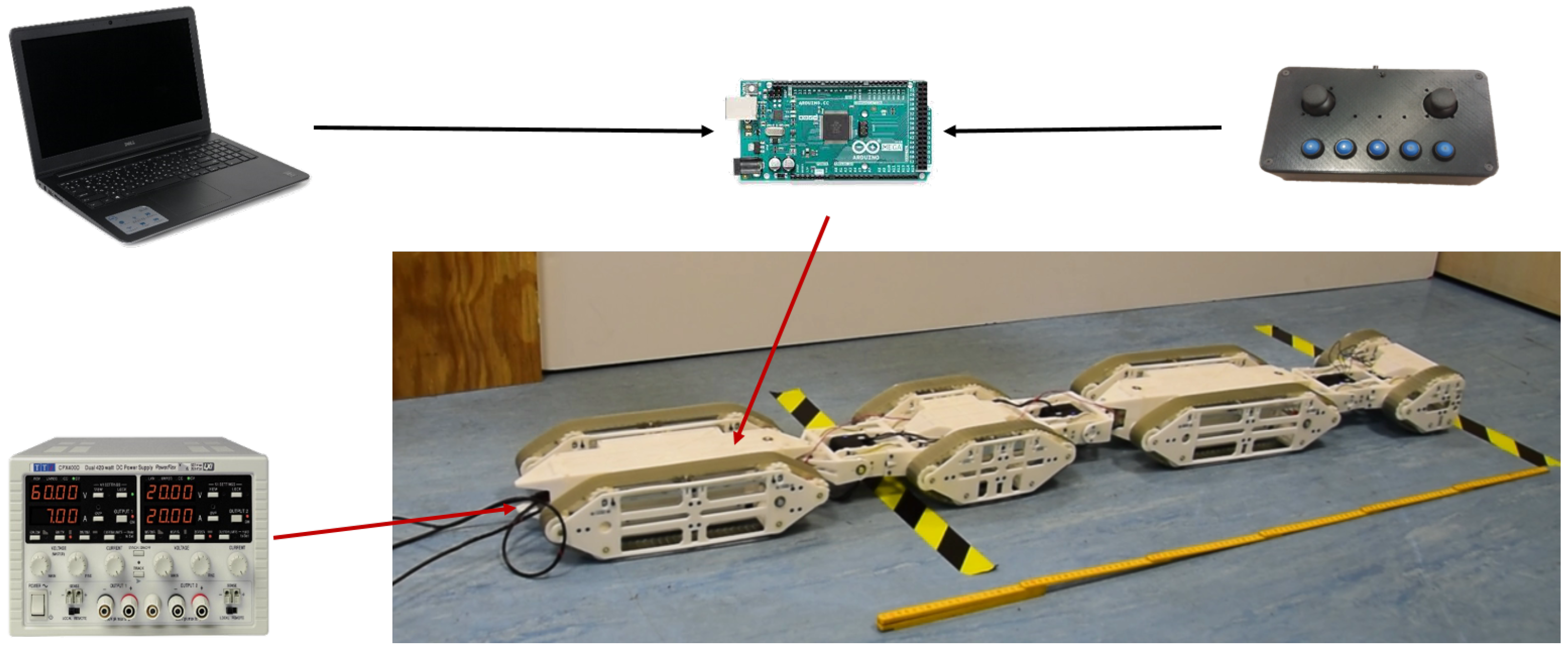
2.4. Electronics and Control
3. Results
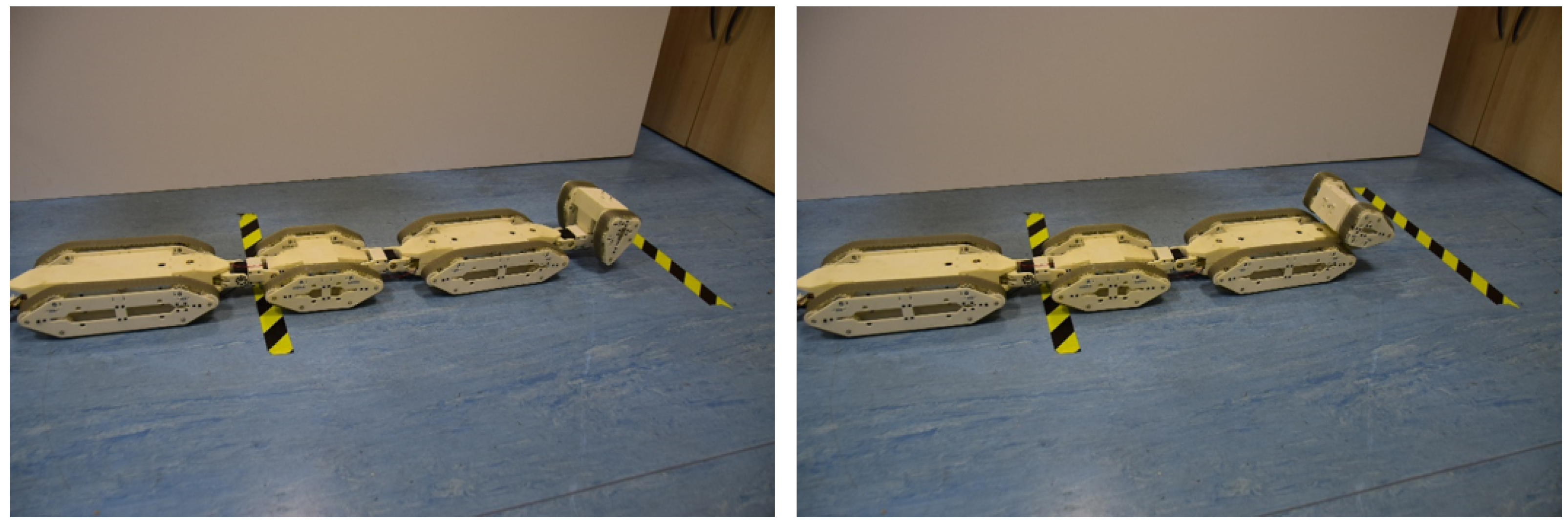
3.1. Forward Motion
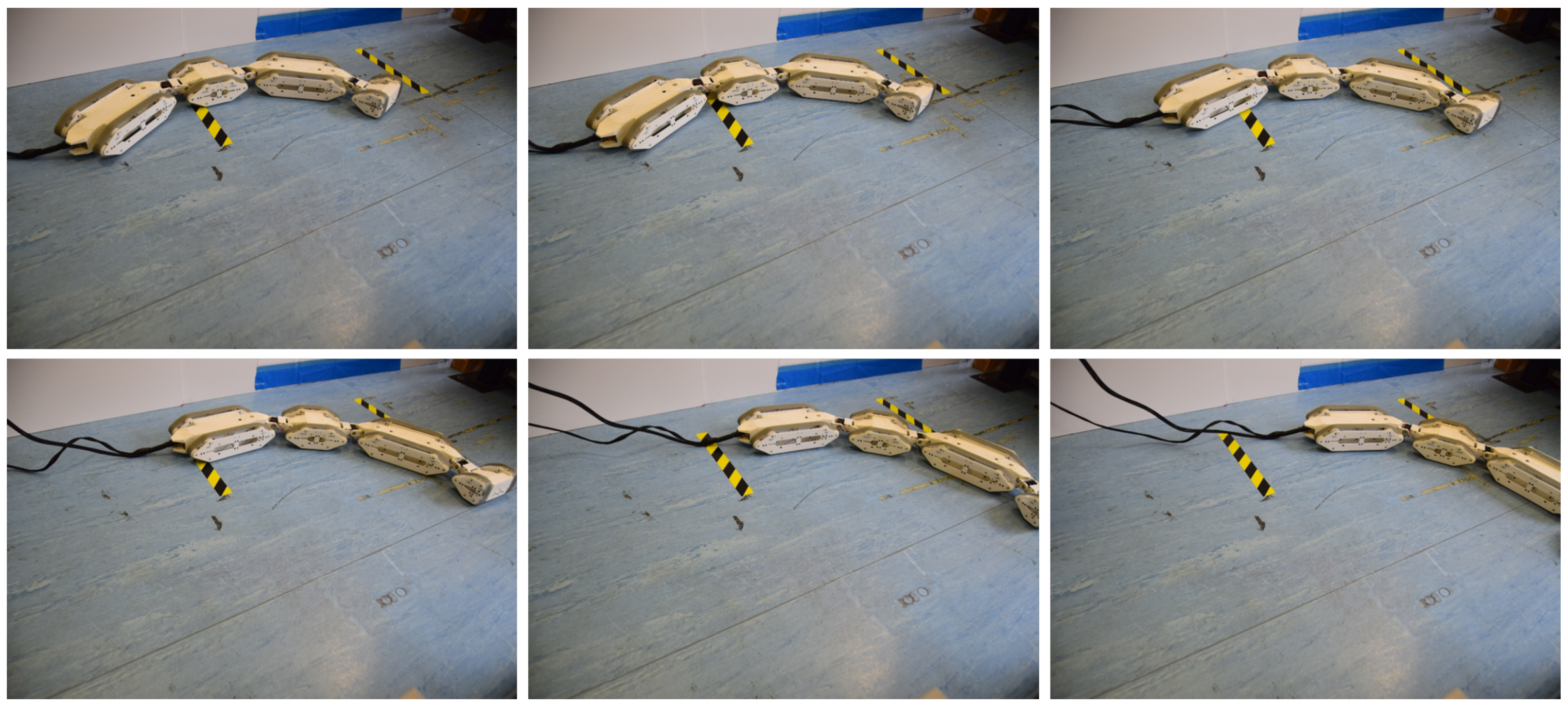
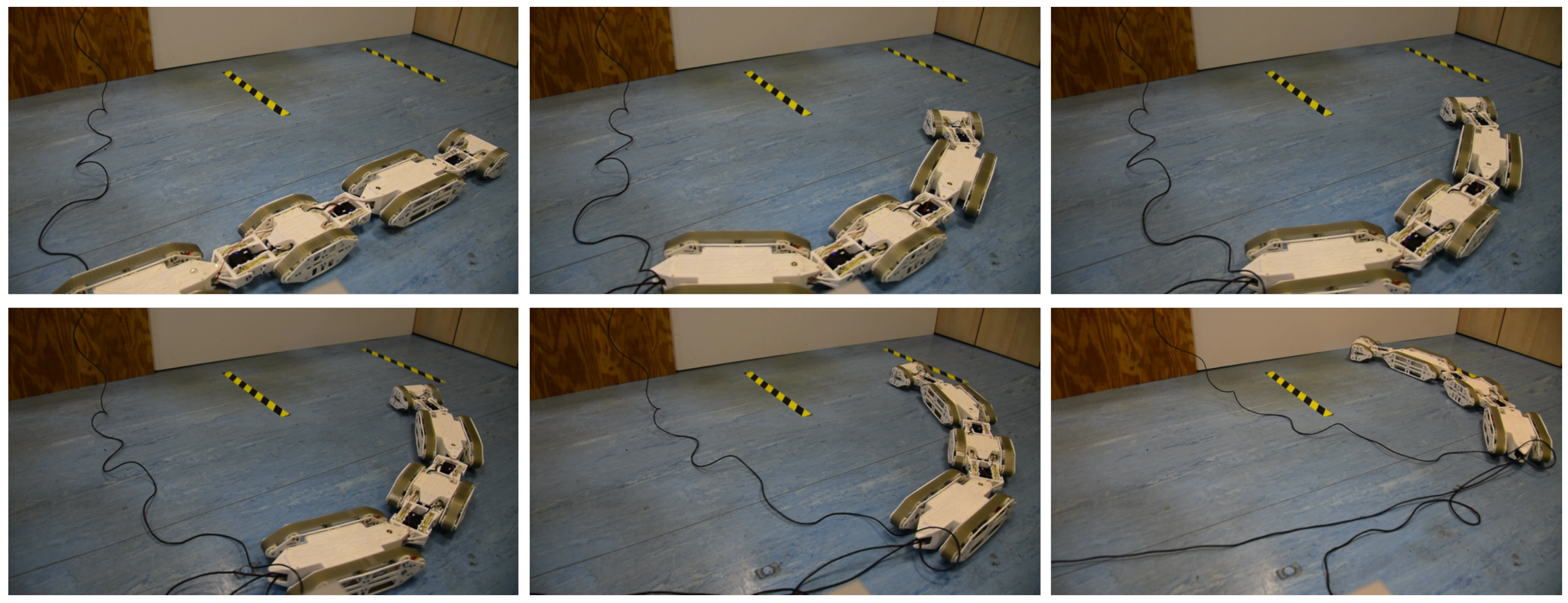
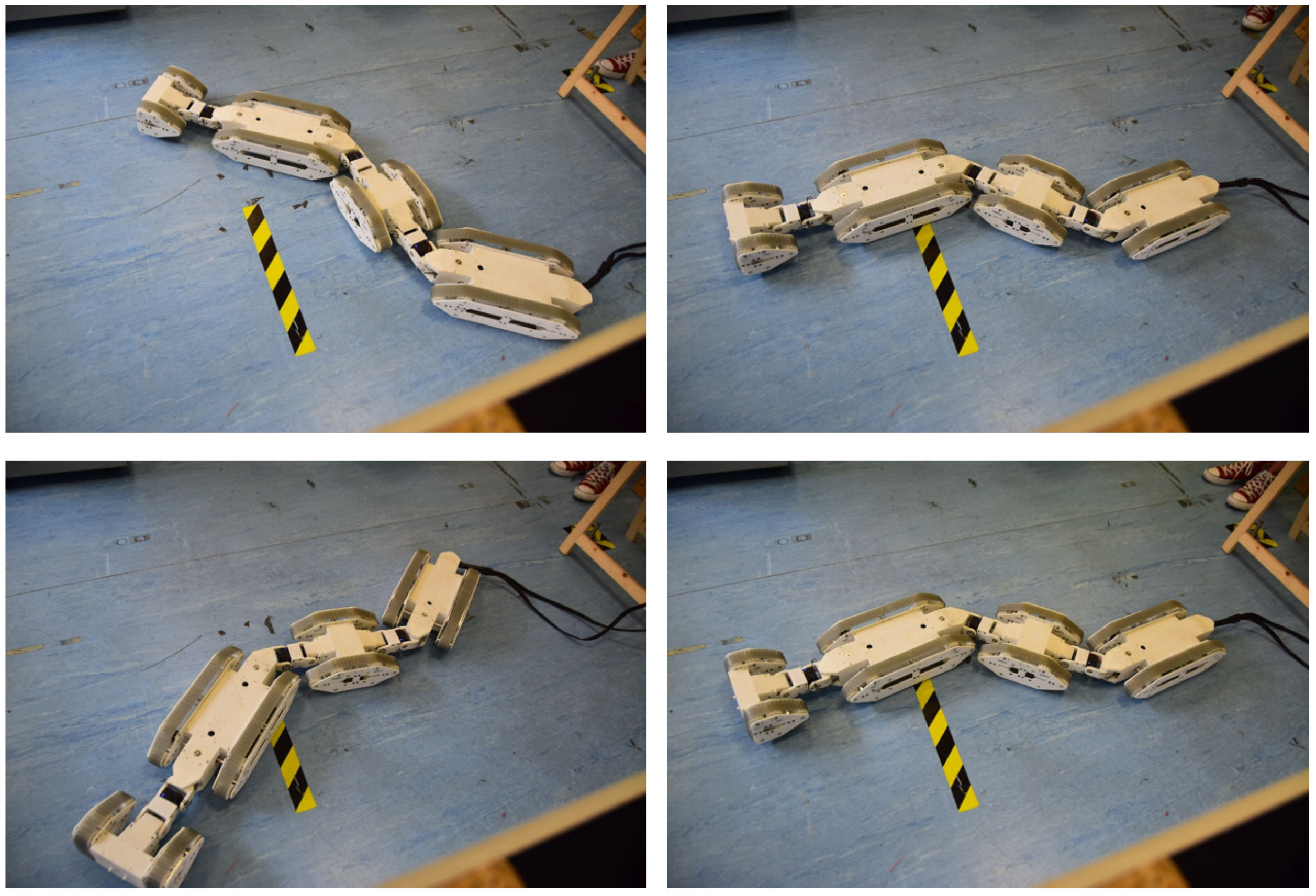
3.2. The C-Configuration
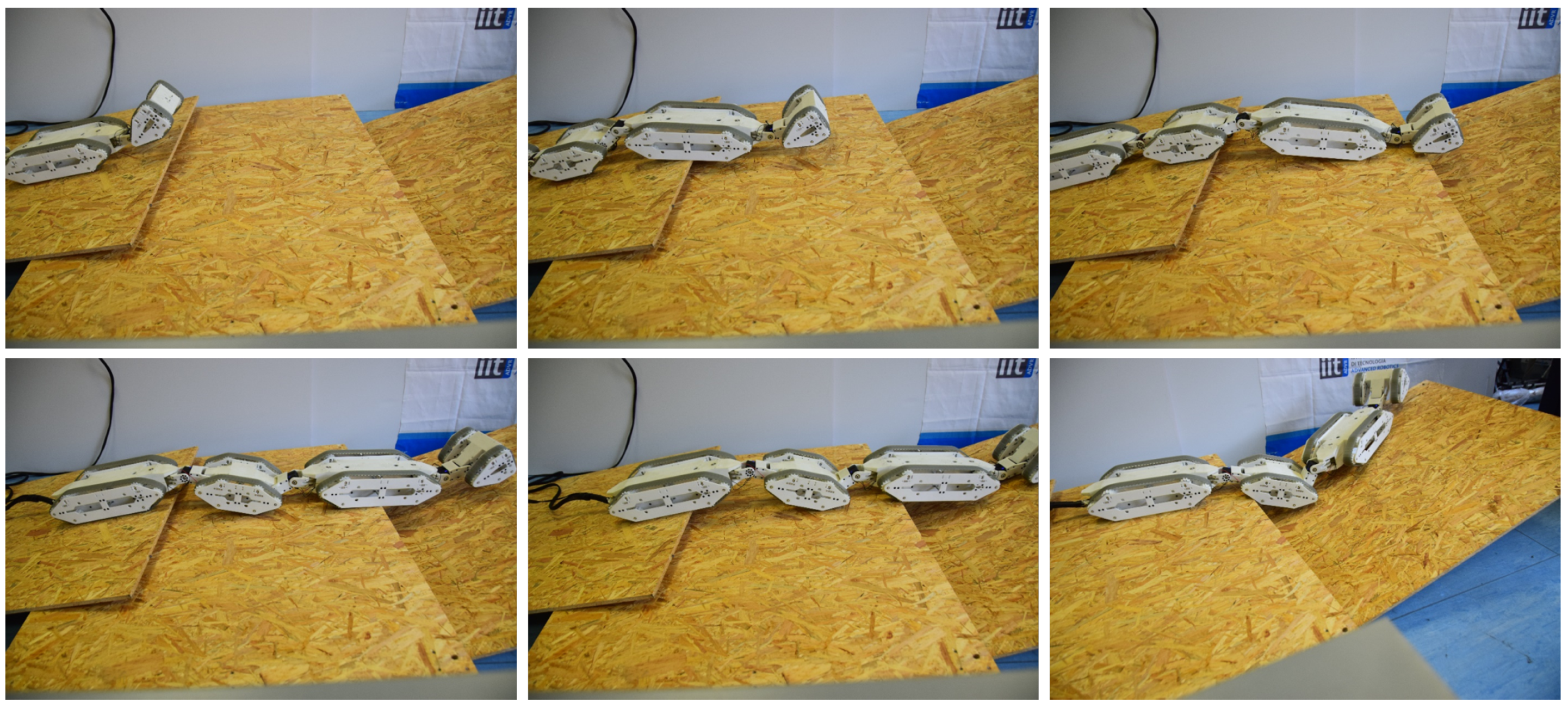
3.3. The S-Configuration
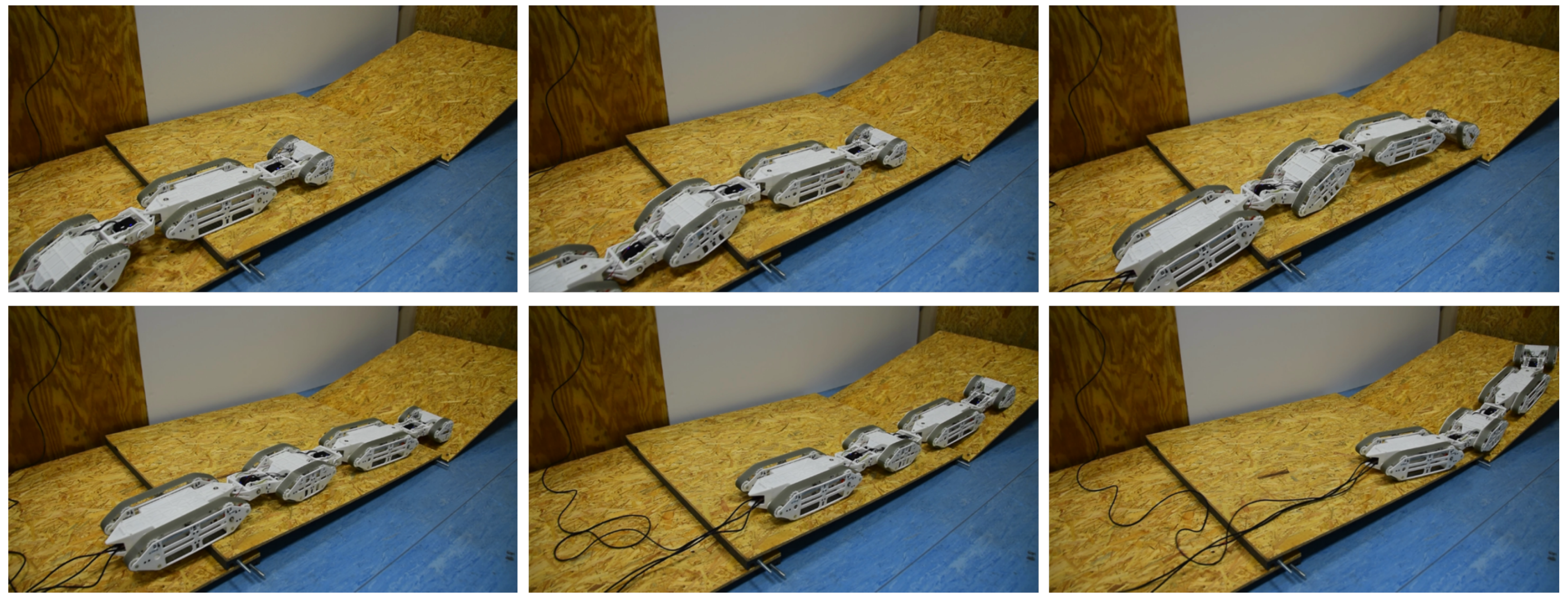
3.4. Climbing Ramps
3.5. Uneven Terrains
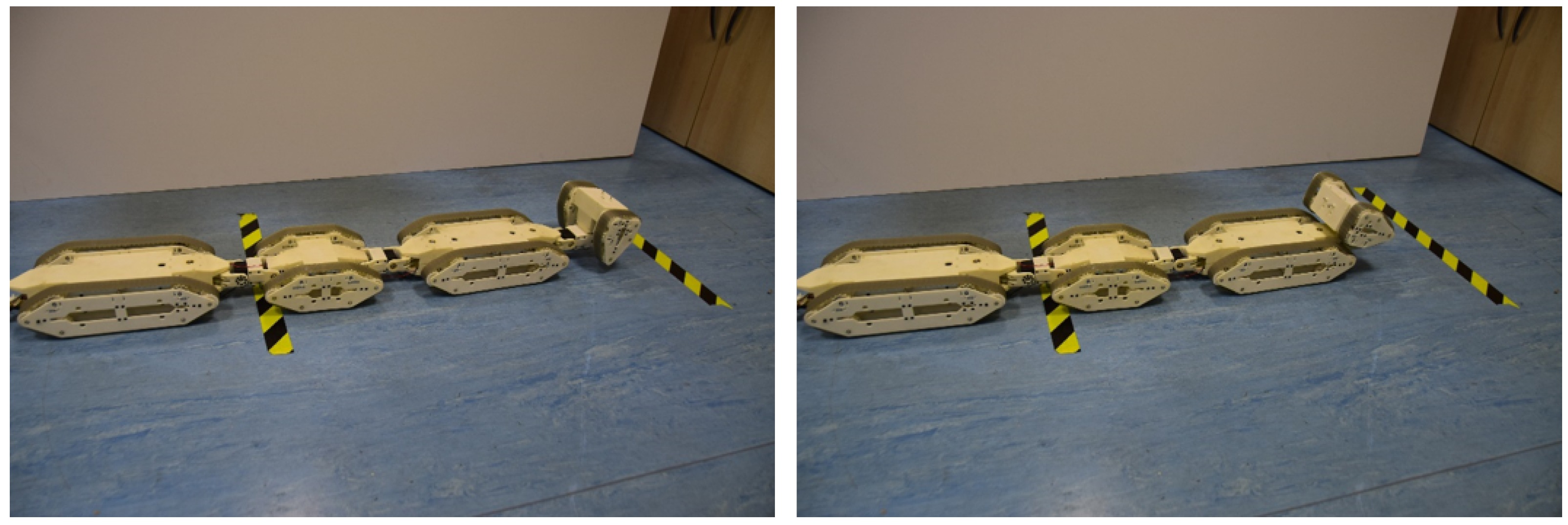
3.6. Lifting Modules
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DoFs | Degrees Of Freedom |
| CoM | Center of Mass |
References
- Maurtua, I.; Susperregi, L.; Fernández, A.; Tubío, C.; Perez, C.; Rodríguez, J.; Felsch, T.; Ghrissi, M. MAINBOT—Mobile Robots for Inspection and Maintenance in Extensive Industrial Plants. Energy Procedia 2014, 49, 1810–1819. [Google Scholar] [CrossRef] [Green Version]
- Soldan, S.; Welle, J.; Barz, T.; Kroll, A.; Schulz, D. Towards Autonomous Robotic Systems for Remote Gas Leak Detection and Localization in Industrial Environments. In Field and Service Robotics; Yoshida, K., Tadokoro, S., Eds.; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2014; pp. 233–247. ISBN 978-3-642-40685-0. [Google Scholar] [CrossRef]
- Merriaux, P.; Rossi, R.; Boutteau, R.; Vauchey, V.; Qin, L.; Chanuc, P.; Rigaud, F.; Roger, F.; Decoux, B.; Savatier, X. The vikings autonomous inspection robot: Competing in the argos challenge. IEEE Robot. Autom. Mag. 2018, 26, 21–34. [Google Scholar] [CrossRef] [Green Version]
- Nagatani, K.; Endo, D.; Watanabe, A.; Koyanagi, E. Design and development of explosion-proof tracked vehicle for inspection of offshore oil plant. In Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 2018; pp. 531–544. [Google Scholar]
- Zwicker, E.; Zesch, W.; Moser, R. A modular inspection robot platform for power plant applicationst. In Proceedings of the 2010 1st International Conference on Applied Robotics for the Power Industry, Montreal, QC, Canada, 5–7 October 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Caprari, G.; Breitenmoser, A.; Fischer, W.; Hürzeler, C.; Tâche, F.; Siegwart, R.; Nguyen, O.; Moser, R.; Schoeneich, P.; Mondada, F. Highly compact robots for inspection of power plants. J. Field Robot. 2012, 29, 47–68. [Google Scholar] [CrossRef] [Green Version]
- Pistone, A.; Canali, C.; Gloriani, C.; Leggieri, S.; Guardiani, P.; Caldwell, D.G. Reconfigurable inspection robot for industrial applications. Procedia Manuf. 2019, 38, 597–604. [Google Scholar] [CrossRef]
- Pignone, E.; Pistone, A.; Canali, C.; D’Agostino, F.; Martorana, G. Design and Validation of a Novel Turbogenerator’s Robotized Inspection System. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2021; Volume 84966, p. V004T05A010. [Google Scholar]
- Canali, C.; Pistone, A.; Ludovico, D.; Guardiani, P.; Gagliardi, R.; De Mari Casareto Dal Verme, L.; Sofia, G.; Caldwell, D.G. Design of a Novel Long-Reach Cable-Driven Hyper-Redundant Snake-like Manipulator for Inspection and Maintenance. Appl. Sci. 2022, 12, 3348. [Google Scholar] [CrossRef]
- Tur, J.M.M.; Garthwaite, W. Robotic devices for water main in-pipe inspection: A survey. J. Field Robot. 2010, 4, 491–508. [Google Scholar]
- Mills, G.H.; Jackson, A.E.; Richardson, R.C. Advances in the inspection of unpiggable pipelines. Robotics 2017, 6, 36. [Google Scholar] [CrossRef] [Green Version]
- Hirose, S. Snake-like Locomotors and Manipulators: Biologically Inspired Robots; Oxford University Press: Oxford, UK, 1993. [Google Scholar]
- Schempf, H.; Mutschler, E.; Gavaert, A.; Skoptsov, G.; Crowley, W. Visual and nondestructive evaluation inspection of live gas mains using the Explorer™ family of pipe robots. J. Field Robot. 2010, 27, 217–249. [Google Scholar] [CrossRef] [Green Version]
- Fjerdingen, S.A.; Liljebäck, P.; Transeth, A.A. A snake-like robot for internal inspection of complex pipe structures (PIKo). In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 5665–5671. [Google Scholar]
- Fischer, W.; Tâche, F.; Siegwart, R. Inspection system for very thin and fragile surfaces, based on a pair of wall climbing robots with magnetic wheels. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1216–1221. [Google Scholar]
- Couceiro, M.S.; Portugal, D.; Rocha, R.P.; Ferreira, N.M.F. Marsupial teams of robots: Deployment of miniature robots for swarm exploration under communication constraints. Robotica 2014, 32, 1017–1038. [Google Scholar] [CrossRef] [Green Version]
- Zhao, P.; Cao, Z.; Xu, L.; Zhou, C.; Xu, D. The design of a mother robot for marsupial robotic system. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 675–679. [Google Scholar]
- Leggieri, S.; Canali, C.; Cannella, F.; Caldwell, D.G. Novel Modular Self-Reconfigurable Robot for Pipe and Plant Inspection. In Proceedings of the ICAS 2020: The Sixteenth International Conference on Autonomic and Autonomous Systems, Lisbon, Portugal, 27 September–1 October 2020; pp. 36–40. [Google Scholar]
- Leggieri, S.; Canali, C.; Cannella, F.; Caldwell, D.G. Self-reconfigurable hybrid robot for inspection. In Proceedings of the 2020 I-RIM Conference, Virtual, 10–13 December 2020; pp. 268–269. [Google Scholar] [CrossRef]
- Leggieri, S.; Canali, C.; Gagliardi, R.; Cannella, F.; Caldwell, D.G. Hybrid Self-Reconfigurable Platform for Inspection: The Crawler Unit. In Proceedings of the 2021 I-RIM Conference, Roma, Italy, 8–10 October 2021; pp. 53–55. [Google Scholar] [CrossRef]
- Leggieri, S.; Canali, C.; Cannella, F.; Lee, J.; Caldwell, D.G. Preliminary Study on the Crawler Unit of a Novel Self-Reconfigurable Hybrid Platform for Inspection. In Proceedings of the 20th International Conference on Advanced Robotics, ICAR 2021, Ljubljana, Slovenia, 6–10 December 2021; pp. 77–82. [Google Scholar]
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; ISBN 978-3-540-23957-4. [Google Scholar]
- Sciavicco, L.; Siciliano, B. Modelling and Control of Robot Manipulators; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Real Time Engineers Ltd. FreeRTOS. Available online: https://www.freertos.org/ (accessed on 20 May 2022).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Crawler Unit Version One | |||
|---|---|---|---|
| Back Module | Central Module | ||
 | Length m; |  | Length m; |
| Height m; | Height m; | ||
| Width m; | Width m; | ||
| Mass Kg. | Mass Kg. | ||
| Front Module | Docking Module | ||
 | Length m; |  | Length m; |
| Height m; | Height m; | ||
| Width m; | Width m; | ||
| Mass Kg. | Mass Kg. | ||
| TOTAL MASS = Kg; | TOTAL LENGTH = m. | ||
| Crawler Unit Version Two | |||
|---|---|---|---|
| Back Module | Central Module | ||
 | Length m; |  | Length m; |
| Height m; | Height m; | ||
| Width m; | Width m; | ||
| Mass Kg. | Mass Kg. | ||
| Front Module | Docking Module | ||
 | Length m; |  | Length m; |
| Height m; | Height m; | ||
| Width m; | Width m; | ||
| Mass Kg. | Mass Kg. | ||
| TOTAL MASS = Kg; | TOTAL LENGTH = m. | ||
| Reference Frame | ||||
|---|---|---|---|---|
| 0 | 0 | |||
| 0 | 0 | |||
| 0 | ||||
| 0 | 0 | |||
| 0 | ||||
| 0 | 0 | |||
| 0 | ||||
| 0 | ||||
| 0 | 0 | |||
| 0 | ||||
| 0 | 0 |
| Herkulex Servomotor | Model: DRS-0602 |
| Total weight: 145 g | |
| Total Stall Torque: Nm | |
| Reduction Ratio: 202:1 | |
| Maxon Motor | Model: DCX12L |
| Total weight: g | |
| Total Stall Torque: Nm | |
| Reduction Ratio: 83:1 | |
| Arduino Board | Model: Mega 2560 |
| Microcontroller: ATmega 2560 | |
| Clock Frequency: 16 MHz | |
| L298N Motor Driver | Driver: L298N Dual H Bridge |
| Motor Channels: 2 | |
| Driver Voltage: 5–35 V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leggieri, S.; Canali, C.; Caldwell, D.G. Design of the Crawler Units: Toward the Development of a Novel Hybrid Platform for Infrastructure Inspection. Appl. Sci. 2022, 12, 5579. https://doi.org/10.3390/app12115579
Leggieri S, Canali C, Caldwell DG. Design of the Crawler Units: Toward the Development of a Novel Hybrid Platform for Infrastructure Inspection. Applied Sciences. 2022; 12(11):5579. https://doi.org/10.3390/app12115579
Chicago/Turabian StyleLeggieri, Sergio, Carlo Canali, and Darwin G. Caldwell. 2022. "Design of the Crawler Units: Toward the Development of a Novel Hybrid Platform for Infrastructure Inspection" Applied Sciences 12, no. 11: 5579. https://doi.org/10.3390/app12115579
APA StyleLeggieri, S., Canali, C., & Caldwell, D. G. (2022). Design of the Crawler Units: Toward the Development of a Novel Hybrid Platform for Infrastructure Inspection. Applied Sciences, 12(11), 5579. https://doi.org/10.3390/app12115579