1. Introduction
The trochoidal roller pinion rack mechanism is a precision transmission device that realizes the mutual conversion of rotation and translation. Since the rack profile is trochoid, the gap in the ordinary rack and pinion transmission can be eliminated, so it can realize zero backlash transmission. In this field, KAMO SEIKO Corp. in Toyota City, Aichi County, Japan is in a leading position and has a series of mature products. Honda and Makino et al. [
1,
2] as pioneers in this field, have carried out a series of basic researches on cycloid roller rack transmission, involving the basic structure, transmission principle and tooth profile shape of cycloid roller rack. Sankar and Natara [
3] proposed a tooth profile modification method to avoid the problem of undercutting. Ohta et al. [
4] discussed the effect of coincidence on the transmission error of cycloid gears, and proposed that the use of double-row cycloid gears is an effective method to reduce the errors of cycloid gears. Gamez-Montero et al. [
5] derived the normal maximum contact stress in the teeth of cycloid gears for the finite element model of quasi-static conditions to evaluate the performance of the gear set.
Zhang et al. [
6,
7] deduced the theoretical tooth profile equation of the rack tooth profile based on the meshing principle of the trochoidal roller pinion rack mechanism, and studied meshing force and contact stress of trochoid roller pinion rack transmission. Luo et al. [
8] proposed another method to solve the problem of undercutting the root of cycloid teeth, optimizing the standard cycloid teeth into trochoid teeth with inclination, so as to obtain trochoidal roller pinion rack mechanism that can eliminate backlash. The rack of the mechanism is designed to have a certain inclination along the direction of the tooth width, and the rolling pin meshing with it is also designed to be a conical rolling pin with a corresponding inclination, so that the transmission mechanism has the advantages of automatic compensation of backlash, stable transmission and accurate positioning. Wang [
9] carried out research on the contact mechanics, fatigue failure, wear failure and finite element simulation of trochoidal roller pinion rack transmission, and revealed the contact mechanics characteristics of trochoidal roller pinion rack transmission, and formed a trochoid rack reliability and service life calculation models. From the above research status, it can be seen that the current research on the trochoidal roller pinion rack is still in the early stage, and the research in many aspects is not deep enough. Efremenkov [
10] studied how to reduce the cost of manufacturing the parts for gears with intermediate rolling elements and, at the same time, maintain a high accuracy of the transmission mechanism. Han [
11] presented a transient hybrid EHL model for cycloidal pinwheel transmission, which takes into account key variable parameters along the meshing surface, including contact load, curvature contact radius, and entrainment speed. Li [
12] take the RV cycloidal-pin gear pair transmission as the object, a meshing contact analysis method is proposed for RV cycloidal-pin gear transmission considering the influence of manufacturing error. Yang [
13,
14] constructed the equations of tooth profile modification to analysis the nonlinear dynamics of the TCG. Xu [
15] proposes a method for analyzing the contact dynamics of the multi-tooth meshing in a cycloidal-pin gear transmission was proposed considering the influences of the turning-arm cylindrical roller bearing. The existing research on trochoidal roller pinion rack mostly focuses on the fields of load performance, optimization and manufacturing, but there is less research on its meshing characteristics.
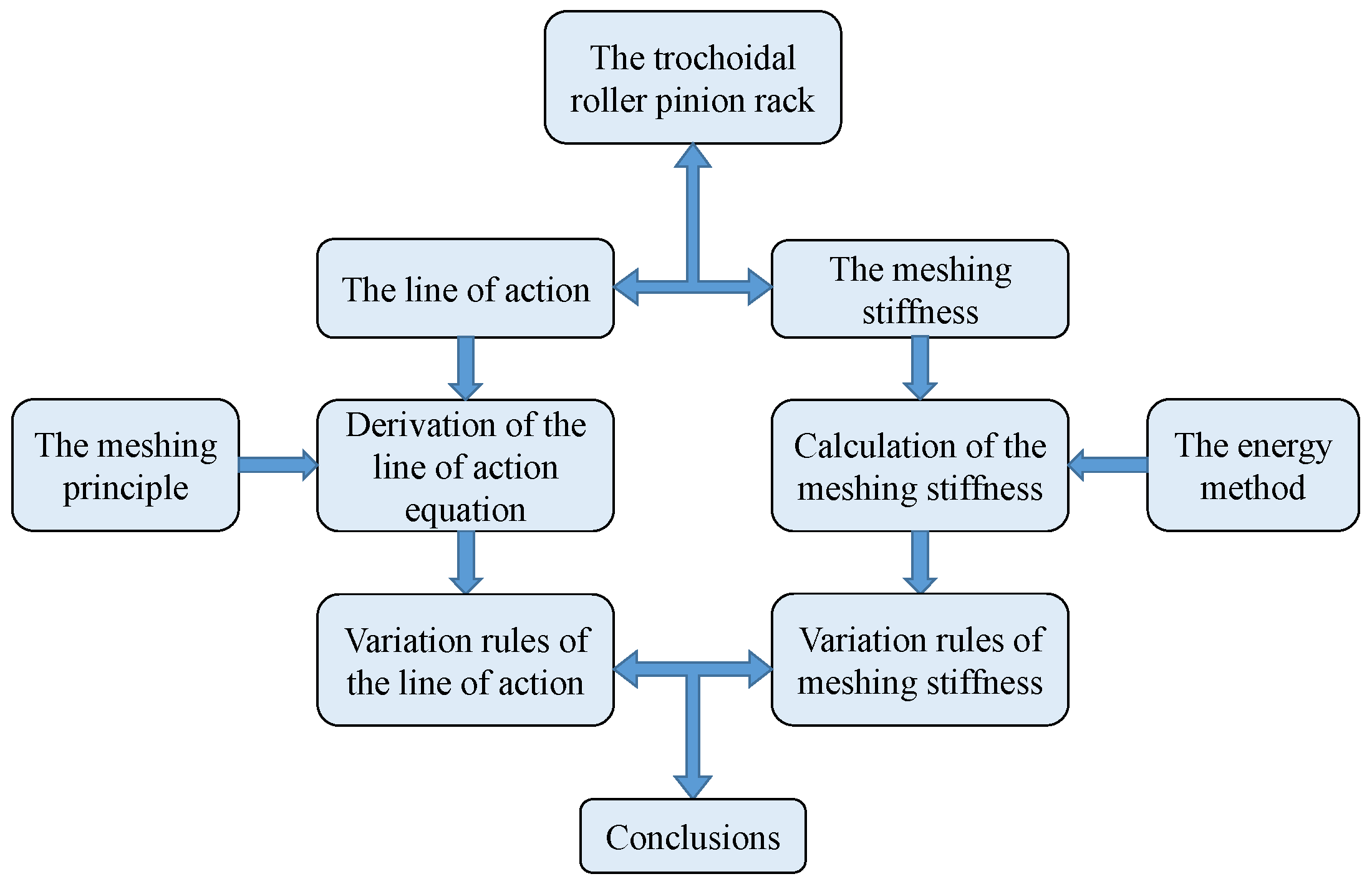
In this paper, the transmission principle of trochoidal roller pinion rack is firstly introduced, then the equation of the line of action according to the meshing principle of trochoidal roller pinion rack is deduced, and the motion of the trochoidal roller pinion rack transmission system is simulated by using Adams software. The simulation meshing point is compared with the theoretical meshing point to verify the correctness of the theoretical deduction, and the influence of each parameter on the line of action is studied. Finally, the meshing stiffness of the trochoidal roller pinion rack is defined and the meshing stiffness is calculated based on the energy method, and study the influence law of each parameter on mesh stiffness. The research content of this paper can be summarized as the flowchart shown in
Figure 1. This paper innovatively deduces the equation of the line of action of the trochoidal roller pinion rack and studies its variation law, and then innovatively uses the energy method to calculate the meshing stiffness of the trochoidal roller pinion rack and study its variation law.
So far, the research on trochoidal roller pinion rack is still at the stage of basic principle, and further research on it is of great significance to its development. Further research is of great significance to its development.
Section 3 of this paper deduces its equation of the line of action based on the meshing principle of trochoidal roller pinion rack. Since this equation is deduced for the first time, the simulation method is used to verify its correctness in
Section 4.
Section 5 uses the energy method used for gear mesh stiffness to calculate the mesh stiffness of the trochoidal roller pinion rack. This mesh stiffness calculation is only used as a reference for the follow-up research, and its verification will be carried out in the follow-up research.
3. Equations of Line of Action
Some scholars have studied the line of action of gears for a long time. The research results show that the line of action of the gear is a straight line, which is the internal common tangent of the base circle of the two gears. There is no research on the line of action of the trochoidal roller pinion rack, so this section first deduces the equation of line of action. The determination of the line of action of the trochoidal roller pinion rack needs to be analyzed from the formation process of its tooth profile. Reference [
6] carried out a detailed study of the trochoid rack tooth profile, and its meshing principle and tooth profile equation have been studied. This paper further studies the line of action of the trochoid roller pinion rack on the basis of reference [
6]. The meshing principle is used to deduce the equations of the line of action, but since no scholars have studied the line of action of the trochoid roller pinion rack before, in order to prove the correctness of the derivation of the equation of the line of action in this paper, in
Section 4 of this paper, kinematics simulation of the trochoid roller pinion rack is carried out to prove the correctness of the theoretical derivation.
Figure 4 is the schematic diagram of the formation of the trochoid rack tooth profile [
6]. As shown in the
Figure 4, the rack pitch line is the
x-axis, and the tooth profile symmetry axis is the
y-axis to establish a coordinate system.
r is the radius of the reference circle of the roller pinion,
R is the radius of the pitch circle of the roller,
Oc is the center of the two circles, and the initial position of
Oc is on the
y-axis. The pitch circle of the roller rolls along the
x-axis, then the path traversed by a point
M’ on the reference circle of the roller pinion is the theoretical tooth profile of the trochoid, the curve formed by a point
N’ that is apart from the normal direction of the theoretical tooth profile by
rf is the actual tooth profile of the trochoid rack. The point
N’ is also the meshing point at a certain moment of meshing. When considering the movement of the roller pinion and rack, the line formed by the meshing point
N’ at each moment during the movement of the trochoid roller pinion rack is the line of action. According to the meshing characteristic that the meshing point must be on the straight line formed by the center of the meshing roller pin and the pitch node, the equation of line of action is deduced in this paper.
The coordinate system is established as shown in
Figure 5, the origin
O of the coordinate system is the pitch node, the
X-axis is the moving direction of the rack, and the
Y-axis passes through the center of the roller pinion. When the rotation angle of the roller pinion is
φ, its meshing state is shown in
Figure 5. Point
A is the center of the meshing roller pin, point
B is the intersection of point
A and the
X-axis, point
D is the meshing point, and point
C is the intersection of point
D and the
X-axis. The triangle
ODC is similar to the triangle
OAB, so these line segments satisfy the relationship of Equation (1).
It can be seen from
Figure 5 that the length of
is the absolute value of abscissa of point
A, the length of
is the value of ordinate of point
A, the length of
is the absolute value of abscissa of point
D, and the length of
is the value of ordinate of point
D. Since point
A is on the reference circle of the roller pinion, the coordinate value of point
A can be expressed by Equations (2).
The length of
can be obtained from the triangle
OAB according to the coordinates of point
A, and the length of
is the radius of the roller pin, so the Equation (1) can be changed to Equation (3).
According to Equation (3), the coordinate equations of the meshing point
D are derived as Equations (4).
The above process is the derivation of the theoretical equation of line of action, but the line of action has a certain length in the actual meshing process. During the meshing process of the roller pins and the rack, the roller pins engage from the root of the tooth and mesh out at the top of the tooth, so the calculation of the actual length of line of action is actually the calculation of the position of the meshing in and meshing out. In this paper, the meshing in point and meshing out point are defined by the rotation angle of the roller pinion, and the meshing in point at the root of the tooth is defined in this paper to be 0°, and the meshing out point at the top of the tooth is
φh.
Figure 6 is the schematic diagram of the meshing in point and meshing out point. The solid line is the meshing situation at the beginning of meshing. Point 1 is the meshing in point, at this time, the angle of the roller pinion is 0°, and the dotted line is the meshing situation at the ending of meshing, and point 2 is the meshing out point, at this time, the rotation angle of the roller pinion is
φh.
The calculation of the rotation angle of the roller pinion at the meshing point 2 also needs to be analysed from the formation principle of the trochoid profile. The meshing process of the roller pinion and the rack is actually the formation process of the trochoid rack tooth profile.
Figure 7 shows the position of the roller pin when the roller pin is out of engagement.
XOY is the coordinate system during meshing, which coincides with the
X-axis in
Figure 5. The difference is that the coordinate system is moving relative to the rack, but the coordinate value in the
Y-axis direction is the same as the value when the tooth profile is formed. The value of
Y-axis coordinate of the meshing out point is
h +
a.
The profile equations of the trochoid rack are Equations (5) [
6]. According to the above analysis and the coordinate equations of the trochoid profile, the roller pinion angle
φh can be obtained by Equation (6).
The parameters of the trochoidal roller pinion rack are shown in
Table 2.
Figure 8 is the curve of the line of action drawn according to Equations (4) and (6).
It can be seen from
Figure 8 that the line of action of the trochoid roller pinion rack is quite different from that of gear pair. The line of action of gear pair is a straight line, while the line of action of the trochoid roller pinion rack is a curve. Marks of 1, 2, 3, 4, and 5 in
Figure 7 are five special points. There have two intersection points where the
X-axis coordinate is equal to 0, which are point 1 and point 3. Point 1 is the start of meshing, and point 3 is above point 1. Point 2 is the limit position of the right end of the line of action. point 4 is the point where the next roller pin starts to enter meshing, at that moment the next roller pin is at the point 1 of the line of action. point 5 is the point where the roller pin meshes out from the tooth top.
5. The Meshing Stiffness of the Trochoid Roller Pinion Rack
For gear pair, the calculation of meshing stiffness has an extremely important position, and the calculation of meshing stiffness has also formed some relatively mature methods, such as the material mechanics method [
16], the conformal mapping method [
17], the finite element method [
18], the loaded tooth contact analysis method [
19], the energy method [
20], etc. For the trochoid roller pinion rack transmission, there is no mature method and result for calculating its meshing stiffness. In this paper, the meshing stiffness of trochoid roller pinion rack is theoretically calculated by referring to the energy method of gear pair, and the influence laws of each parameter on meshing stiffness are studied.
The research on meshing stiffness plays an important role in dynamics research. As a new type of precision machinery, the meshing stiffness of the trochoid roller pinion rack are still blank. In this section, the meshing stiffness of the trochoid roller pinion rack is theoretically calculated with reference to the energy method used for the calculation of gear meshing stiffness. Since the teeth of the gear and the teeth of the trochoid rack have similar characteristics, this paper uses the energy method in reference [
21] to replace the gear model with the rack model to calculate its meshing stiffness. This paper only proposes its meshing stiffness calculation method as a reference for follow-up research, its experimental verification will continue in follow-up research.
5.1. Definition of Meshing Stiffness of Trochoidal Roller Pinion Rack
The meshing stiffness of gear pair is in the normal direction of the line of action. The line of action of the gear pair is a straight line and the pressure angle does not change during the transmission process. However, the pressure angle of the trochoid roller pinion rack changes with time as shown in
Figure 19. The interval 1 is a meshing period, the interval 2 is the double-tooth meshing interval, and the interval 3 is the single-tooth meshing interval. It can be seen that the pressure angle of the meshing point of the two roller pins in the double-tooth meshing interval is quite different. This meshing characteristic is different from the fixed pressure angle of the gear. In the traditional gear transmission, the meshing stiffness of the double-tooth meshing area is the direct superposition of the meshing stiffness of the two meshing points, but it cannot be fully applied to the trochoidal roller pinion rack.
Since the output of the trochoid roller pinion rack is a circular motion, it is more practical to convert the meshing stiffness into the torsional stiffness on the roller pinion. The meshing stiffness krp of the trochoid roller pinion rack is defined as the torque value required for the roller pinion to produce 1 rad torsional deformation, which is the deformation of the tangential direction of the meshing point converted to the deformation on the roller pinion. The pressure angle of the two meshing points in the double-tooth meshing area of the trochoid roller pinion rack is quite different, and the normal direction of the meshing point is not the same as the tangential direction of the roller pinion where the meshing point is located. Therefore, it is necessary to convert the meshing stiffness at the two meshing points during calculation. The normal meshing stiffness k of the meshing point is calculated by the energy method, and then it is first converted into the tangential meshing stiffness kt of the roller pinion, and then kt is converted into the torsional meshing stiffness krp of the roller pinion. The conversion method between the stiffnesses is described as following.
As shown in
Figure 20,
Di represents the
i-th (
i = 1,2) meshing point,
O is the pitch node of the rack,
DiO represents the force direction at the meshing point
Di, and
li represents the tangent direction of the meshing point
Di on the roller pinion direction, and
θi represents the angle between the force direction and the tangent direction of the meshing point
Di,
Ri represents the distance between the meshing point
Di and the
O’ which is the center of the roller pinion. Using the energy method, the meshing stiffness
ki of
Di can be directly calculated, the normal meshing stiffness
ki is in the
DiO direction. The meshing stiffness of the two meshing points is superimposed as the system normal meshing stiffness
k. The calculation method of the tangential meshing stiffness
kt of the trochoid roller pinion rack is shown in Equation (7), and the calculation method of the meshing stiffness
krp is shown in Equation (8).
5.2. Calculation of the Stiffness of Each Component
The energy method is used to calculate the normal meshing stiffness of the trochoid roller pinion rack [
21]. The hertzian contact potential energy
Uh, bending potential energy
Ub, shear potential energy
Us, and axial compression potential energy
Ua during the meshing process are mainly considered. The relationship between these potential energy and stiffness is shown in Equation (9) [
21].
where
F is the static normal meshing force at the meshing point,
Ui (
i =
h,
b,
s,
a) is the potential energy existing in meshing, and
ki(
i =
h,
b,
s,
a) is the stiffness corresponding to each potential energy.
The total energy stored in a pair of meshing pairs is shown in Equation (10) [
21]. In the Equation (10), subscripts 1 and 2 represent rack and roller pinion respectively. Equation (11) [
21] is used to calculate the normal stiffness at the meshing point. Since the rack of the roller pinion is engaged alternately with single and double tooth, the meshing stiffness in the normal direction of time variation in the whole meshing is Equation (12).
where
i (
i = 1, 2) is the
ith engagement pair.
There is a formula relationship between energy and each component stiffness. The force exerted on a certain instant of the rack in the meshing process is shown in
Figure 21, where
α is the meshing pressure angle.
Bending energy, shear energy and axial compression energy can be obtained according to the material mechanics method, and can be expressed as Equations (13)–(15) [
21] respectively.
where,
Fb =
Fcos
α,
Fa =
Fsin
α,
M =
Fbx −
Fah,
d is the height between the force point and the tooth root which is shown in
Figure 20.
The bending deformation flexibility of the rack in the meshing process can be expressed as Equation (16) [
21].
The shear deformation flexibility of the rack is expressed in Equation (17) [
21].
The axial compression deformation flexibility of the rack is expressed in Equation (18) [
21].
The contact deformation flexibility of the rack is expressed in Equation (19) [
21].
where,
E is the elastic modulus of material,
G is the shear modulus of material,
G =
E/2(1 +
ν),
Ix is the moment of inertia of the section at the meshing point
M,
Ix = 2/3
hx3L,
Ax is the cross section area at the meshing point
M,
Ax = 2
hxL,
ν is the poisson’s ratio of material,
L is the tooth width of rack.
The rotation angle of the roller pinion corresponding to the meshing point M is φM, and the coordinates at the meshing point M(xM, yM) can be calculated according to the rotation angle φM at point M by using Equation (5).
The calculation method of meshing pressure angle
α at the meshing point is shown in Equation (20) [
6].
Since the coordinate of the trochoidal rack tooth profile curve is derived according to the rotation angle
φ of the roller pinion, the
φ is also integrated in the calculation of flexibility, which needs to use the substitution method to replace the above various parameters with the
φ. Each parameter can be expressed by the rotation angle
φ of the roller pinion through Equations (21)–(24).
where
p is the pitch of the rack.
Through the substitution method, the calculation methods of each deformation flexibility of the rack are shown in Equations (25)–(28).
As for the stiffness calculation of the roller pinion, since the roller pin is cylindrical and the meshing force direction always passes through the center of the circle in the meshing process, the roller pin stiffness can be approximately considered as a constant value.
The bending deformation flexibility of the roller pinion is expressed in Equation (29).
where
Lr is the width of the roller pinion.
The shear deformation flexibility of the roller pinion is expressed in Equation (30).
The axial compression deformation flexibility of the roller pinion is expressed in Equation (31).
5.3. Calculation of Time-Varying Meshing Stiffness
As the deformation flexibility and stiffness are reciprocal, the normal meshing stiffness of the trochoidal roller pinion rack with double tooth meshing is expressed in Equation (32).
Figure 22 shows the meshing situation of trochoidal roller pinion rack with double tooth meshing. The meanings of each parameter are the same as those in
Figure 19. Because the force direction of the meshing point is not consistent with the tangential direction, so the meshing stiffness in the normal direction needs to be converted to the tangential direction of the roller pinion, and the meshing stiffness in the tangential direction of the roller pinion is calculated by Equation (33).
The triangle
D2OO’ in
Figure 18,
D2 is the meshing point, its coordinate equation is Equation (5).
O is the origin (0, 0), The
O’ coordinate is (0,
R). Angle
OD2O’ can be calculated by using the cosine theorem in the triangle, and the calculation method of angle
θi can be calculated by Equation (34).
The distance between the meshing point and the center of the roller pinion changes at different meshing moments, as shown in
Figure 21. The meshing radius
R1 is
D1O’ at point
D1, and the meshing radius
R2 is
D2O’ at point
D2. The meshing stiffness in the tangential direction of the meshing point
kt is transformed into the meshing stiffness of the trochoidal roller pinion rack
krp by Equation (35).
The calculation method of
Ri is shown in Equation (36).
The meshing stiffness per tooth width of the trochoidal roller pinion rack can be obtained by calculating the parameters of the trochoidal roller pinion rack shown in
Table 4, as shown in
Figure 23. The meshing stiffness curve is the time-varying meshing stiffness curve of a roller pin in the whole process from entering meshing to leaving meshing.
The meshing stiffness in
Figure 23 shows the dividing line of single tooth and double tooth meshing area. That is double tooth meshing area at the beginning of meshing, at this point the second roller pin has just started to enter the mesh, the meshing stiffness of double tooth meshing area increases first and then decreases. The reason for the low meshing stiffness at the starting point is that the angle
θ1 is large at the beginning of double tooth meshing area, as shown in
Figure 22, therefore, the value of meshing point
D1 stiffness converted to tangent direction is very small, so the meshing point does not play an important role in meshing, and the force is mainly borne by
D2. With the rotation of the roller, the value of
θ1 will gradually decrease, resulting in the increase of meshing stiffness. Then, as the rotation angle of the roller pinion continues to increase, the position of the meshing point on the rack gradually moves up. At this time, the tooth thickness at the meshing point of the rack gradually decreases, resulting in the meshing stiffness decreases again. As the roller angle continues to increase, a roller pin will disengage and the engagement becomes a single tooth engagement. In the meshing region of single tooth, the position of meshing point on the rack gradually moves up with the increase of roller angle. Then the tooth thickness at the meshing point of the rack gradually decreases, leading to the decrease of meshing stiffness. Finally, the next roller pin comes into meshing and becomes double tooth meshing area for the next meshing cycle.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}